RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
デンキチこと電気基地外通信部による貫通型無差別範囲爆撃(?)によって破壊されたモータードライバー。
ロジックICとFETを取り替えてようやく今日復活しました。
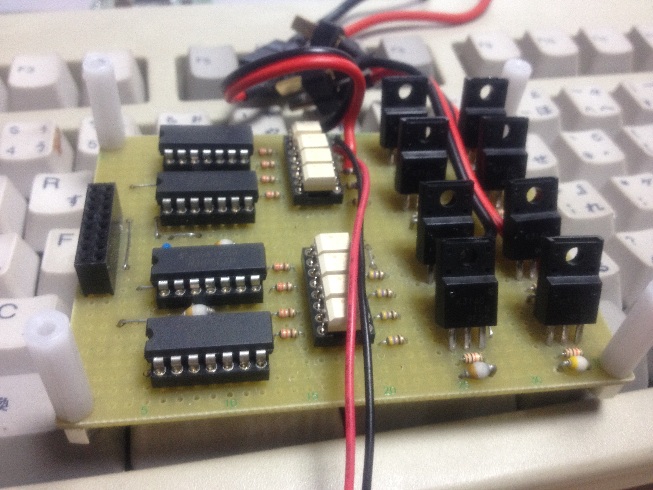
昨日アキバにいけなっかたらこの短期間での復活はあり得なかったでしょうね。良かった良かった。
只でさえ2SK3140は過負荷に弱いのですぐお亡くなりになられる上に、この有り様ですから溜まったものではありません。
勿論財布的な意味でですよ?今月も大赤字です。
それで今度なのですが、この3140の過負荷に弱いという弱点から、また新しいFETの実験をしてみようと思います。
IRFI3205は定格以上に損失が大きかったのでボツとして・・・。
他のIRFIシリーズは高いし・・・。
という訳で今日は2年生御用達のP75N75、通称「ぴーなごえぬなご」を試してみました。

5個で300円と、3140の5分の1の値段で、性能も悪くない、非常にコストパフォーマンスの良いFETです。
今のところ、2年生が使っている分にはほとんど問題は起きていないので信頼性も申し分ありません。
という訳で使ってみようと思ったのですが・・・どうにもNchのみで作ろうとするとうまくいかないみたい。
J337のようなPchと組み合わせるか、多電源にしないとちゃんと開いてくれないようです。
まだちゃんと試していないのでなんとも言えないですが、後輩の話だとムリっぽいとのこと。
別にPchのFET混ぜてもいいんですけど、1種類で作ったほうがメンテ性が良いし、HsideとLsideの特性差がでない、
何より楽なんですよね。という訳で保留に。というか使わない方向で・・・。
という訳で、次は2SK3140の上位互換である2SK3510というFETを試してみようと思います。
10個で2300円ほどと、3140より安く、電力定格、つまり対過負荷性能が4倍程良くなっています。
また、応答速度も早・・・ゼンタイテキニセイノウガアガッテイマス。
いちいち書くよりもうこの一言で十分ですね。こんなFETを1個買ってきたので今度はこれで試してみようと思います。
それでは今日はこの辺で。
(^・ω・)ノ RadiumProduction in RoboCup Junior
ロジックICとFETを取り替えてようやく今日復活しました。
昨日アキバにいけなっかたらこの短期間での復活はあり得なかったでしょうね。良かった良かった。
只でさえ2SK3140は過負荷に弱いのですぐお亡くなりになられる上に、この有り様ですから溜まったものではありません。
勿論財布的な意味でですよ?今月も大赤字です。
それで今度なのですが、この3140の過負荷に弱いという弱点から、また新しいFETの実験をしてみようと思います。
IRFI3205は定格以上に損失が大きかったのでボツとして・・・。
他のIRFIシリーズは高いし・・・。
という訳で今日は2年生御用達のP75N75、通称「ぴーなごえぬなご」を試してみました。
5個で300円と、3140の5分の1の値段で、性能も悪くない、非常にコストパフォーマンスの良いFETです。
今のところ、2年生が使っている分にはほとんど問題は起きていないので信頼性も申し分ありません。
という訳で使ってみようと思ったのですが・・・どうにもNchのみで作ろうとするとうまくいかないみたい。
J337のようなPchと組み合わせるか、多電源にしないとちゃんと開いてくれないようです。
まだちゃんと試していないのでなんとも言えないですが、後輩の話だとムリっぽいとのこと。
別にPchのFET混ぜてもいいんですけど、1種類で作ったほうがメンテ性が良いし、HsideとLsideの特性差がでない、
何より楽なんですよね。という訳で保留に。というか使わない方向で・・・。
という訳で、次は2SK3140の上位互換である2SK3510というFETを試してみようと思います。
10個で2300円ほどと、3140より安く、電力定格、つまり対過負荷性能が4倍程良くなっています。
また、応答速度も早・・・ゼンタイテキニセイノウガアガッテイマス。
いちいち書くよりもうこの一言で十分ですね。こんなFETを1個買ってきたので今度はこれで試してみようと思います。
それでは今日はこの辺で。
(^・ω・)ノ RadiumProduction in RoboCup Junior
事の発端は今週の火曜日。
電気通信部が部室でコイルガンの第二射を行った時の話です。
コイルガンは発射の際にとんでもない量の電場を引き起こします。
まぁ数百V使ってますから当然ですね。
その後、部室に戻ってモータードライバーを動かしたのですが、
部室にあったモータードライバー回路が悉く燃え尽きていました。
FETがどかーん。原因不明の焼失により、2000円ほど飛びました(笑)
今まで問題なく動いていたのに・・・原因不明もいいところです。
でも、
その時は気がついてなかったのですが、よくよく考えてみると
コイルガンの発射のタイミングと、モータードライバーの破壊のタイミングが一致してるんです。
もしかしてー破壊の原因って・・・。
隣の部室から電場による不可視の無差別範囲攻撃を食らった可能性のあることが判明した今日のロボカップ部でした。
それにしても、あれが攻撃だとしたら、電気通信部室内にあるアマ無線機は大丈夫でしょうか・・・(苦笑)
自滅していないかも気になるところです。
(^・ω・)ノ RadiumProduction in RoboCup Junior
電気通信部が部室でコイルガンの第二射を行った時の話です。
コイルガンは発射の際にとんでもない量の電場を引き起こします。
まぁ数百V使ってますから当然ですね。
その後、部室に戻ってモータードライバーを動かしたのですが、
部室にあったモータードライバー回路が悉く燃え尽きていました。
FETがどかーん。原因不明の焼失により、2000円ほど飛びました(笑)
今まで問題なく動いていたのに・・・原因不明もいいところです。
でも、
その時は気がついてなかったのですが、よくよく考えてみると
コイルガンの発射のタイミングと、モータードライバーの破壊のタイミングが一致してるんです。
もしかしてー破壊の原因って・・・。
隣の部室から電場による不可視の無差別範囲攻撃を食らった可能性のあることが判明した今日のロボカップ部でした。
それにしても、あれが攻撃だとしたら、電気通信部室内にあるアマ無線機は大丈夫でしょうか・・・(苦笑)
自滅していないかも気になるところです。
(^・ω・)ノ RadiumProduction in RoboCup Junior
2sk31401200円分が焼失したのを記念して、以前に紹介したMOSFET、IRFI3205PBFを試してみることにしました。
とりあえず燃えた2SK3140を行政処分した後に、そこに新しくIRFI3205PBFを接続してみました。
同じHブリッジ内に2種類のNchFETがあるという不思議な状態になりました。
さて、本来なら抵抗やらなんやら、計算して変えないといけないのですが、
データシート見た感じだと行ける雰囲気があったのでそのまま繋ぎ変えてみることに。
先程終了したので試しににモーターを動かしてみました。さて、どうなったかといいますと・・・
まず回転速度。これはちょっと落ちました。まぁ仕方がないですね。
その代りにモーターの応答速度が異常によくなりました。
まぁ要するに回転方向を変更する速度が良くなったのと、後はPWMの精度が上がりました。
つまりモーターの方向とパワー、両方の制御が行いやすくなったという訳です。
変化としてはこんな感じ。今まで微妙に制御信号と違う動きをしていたモーターが、今ではちゃんということを聞くように。
という訳で今日はFETを変えたら色んな意味でモーターが大人しくなった話でした。
(^・ω・)ノ RadiumProduction in RoboCup Junior
とりあえず燃えた2SK3140を行政処分した後に、そこに新しくIRFI3205PBFを接続してみました。
同じHブリッジ内に2種類のNchFETがあるという不思議な状態になりました。
さて、本来なら抵抗やらなんやら、計算して変えないといけないのですが、
データシート見た感じだと行ける雰囲気があったのでそのまま繋ぎ変えてみることに。
先程終了したので試しににモーターを動かしてみました。さて、どうなったかといいますと・・・
まず回転速度。これはちょっと落ちました。まぁ仕方がないですね。
その代りにモーターの応答速度が異常によくなりました。
まぁ要するに回転方向を変更する速度が良くなったのと、後はPWMの精度が上がりました。
つまりモーターの方向とパワー、両方の制御が行いやすくなったという訳です。
変化としてはこんな感じ。今まで微妙に制御信号と違う動きをしていたモーターが、今ではちゃんということを聞くように。
という訳で今日はFETを変えたら色んな意味でモーターが大人しくなった話でした。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今日の活動内容ですが、完成したマルチプレクサーを外装に取り付けようと考えていたのですが、
不慮の事故によってできなくなってしまいました。
というのも、なんていうか、モータードライバーが過負荷で吹っ飛びました(笑)
回路の下のほうが急に明るくなったと思ったらバンッ!という爆発音。
ただのダイオードが発光ダイオードになった瞬間でした。
あとで調べてみたらFET付属のダイオードが隣の抵抗を巻き込んで真っ二つに破砕されていました。
今まで通常通り動いていたのと、多少かけ過ぎた感があったので原因は過負荷による過剰な逆電流。
これで間違いないでしょう。
保護ダイオードどころかFETもまとめて吹っ飛びましたからね。相当かかっていたんだと思います。
「あっやば・・・」バンッ!って感じでしたね。
という訳で今日はその修正でおわり・・・というか、まだ終わっていません(笑)
それにしてもここ最近この付近で爆発事故が多いような・・・。
色々と治安が危ぶまれる産技高専北棟でした。
(^・ω・)ノ RadiumProduction in RoboCup Junior
不慮の事故によってできなくなってしまいました。
というのも、なんていうか、モータードライバーが過負荷で吹っ飛びました(笑)
回路の下のほうが急に明るくなったと思ったらバンッ!という爆発音。
ただのダイオードが発光ダイオードになった瞬間でした。
あとで調べてみたらFET付属のダイオードが隣の抵抗を巻き込んで真っ二つに破砕されていました。
今まで通常通り動いていたのと、多少かけ過ぎた感があったので原因は過負荷による過剰な逆電流。
これで間違いないでしょう。
保護ダイオードどころかFETもまとめて吹っ飛びましたからね。相当かかっていたんだと思います。
「あっやば・・・」バンッ!って感じでしたね。
という訳で今日はその修正でおわり・・・というか、まだ終わっていません(笑)
それにしてもここ最近この付近で爆発事故が多いような・・・。
色々と治安が危ぶまれる産技高専北棟でした。
(^・ω・)ノ RadiumProduction in RoboCup Junior
昼寝の後に動作確認をしたら、抵抗が足りないことに気がついて、付け足したらちゃんと動いてくれました。
只、とても気持ち悪い基盤になってしまったので、他の人では作れなさそうな感じですね。
たった12×8の基盤にどれだけ詰め込んでるんだか。人間やれば出来るものです。
といっても実は今日はこっちはメインじゃないんです。
産技祭の販売物品に関するネタなのは同じなのですが、その内容が違うんです。実は今日のメインは此方。

紐の固まり。なんか名状しがたい物体が見えるような気もしますが、こんなものです。
これ、なにかと申しますと、麻紐で作られた馬ラクダなんです。
そう、要するにキーホルダー的なアレです。
紐でくるくる~っとねじって結んで、作ってみました。

・・・本来は馬の予定だったのですが、ホラ、後ろの方がね・・・なんか太ましいっていうか・・・。
やっぱり色々と着眼点にムリがあったかも・・・という反省はしています。後悔はしていません。
まぁこれ、特徴としては、見ての通り、
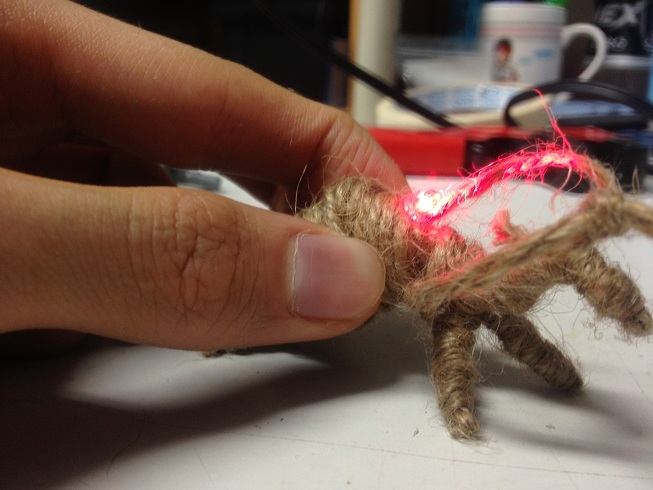
光ります。それはもう、神々しく。
まぁLED見えてますからね。バレバレっちゃバレバレですね。
この馬が太ましいラクダになってしまったのは勿論これが原因です。電池が大きすぎた・・・。
LEDを内蔵して心の臓から光るような試作品も作ったのですが、本当に太ましくなってしまったので却下になりました。
まぁそんなこんなでこんなものを今作っているのですが、
何を土地狂ったのか、なんとこれ、産技祭に出店予定の逸品です(笑)
本当にこんなものを売りつけるのか、そして売れるのか。
どう考えてもLEDなしの綺麗な馬のほうが売れるのではないか。
まだ色々な試行が必要ではありますが、こんなのも売っていこうと思います。
正直ロボカップ全く関係ないね。という訳で今日は手芸部の一日でした。
(^・ω・)ノ RadiumProduction in RoboCup Junior
只、とても気持ち悪い基盤になってしまったので、他の人では作れなさそうな感じですね。
たった12×8の基盤にどれだけ詰め込んでるんだか。人間やれば出来るものです。
といっても実は今日はこっちはメインじゃないんです。
産技祭の販売物品に関するネタなのは同じなのですが、その内容が違うんです。実は今日のメインは此方。
紐の固まり。なんか名状しがたい物体が見えるような気もしますが、こんなものです。
これ、なにかと申しますと、麻紐で作られた馬ラクダなんです。
そう、要するにキーホルダー的なアレです。
紐でくるくる~っとねじって結んで、作ってみました。
・・・本来は馬の予定だったのですが、ホラ、後ろの方がね・・・なんか太ましいっていうか・・・。
やっぱり色々と着眼点にムリがあったかも・・・という反省はしています。後悔はしていません。
まぁこれ、特徴としては、見ての通り、
光ります。それはもう、神々しく。
まぁLED見えてますからね。バレバレっちゃバレバレですね。
この馬が太ましいラクダになってしまったのは勿論これが原因です。電池が大きすぎた・・・。
LEDを内蔵して心の臓から光るような試作品も作ったのですが、本当に太ましくなってしまったので却下になりました。
まぁそんなこんなでこんなものを今作っているのですが、
何を土地狂ったのか、なんとこれ、産技祭に出店予定の逸品です(笑)
本当にこんなものを売りつけるのか、そして売れるのか。
どう考えてもLEDなしの綺麗な馬のほうが売れるのではないか。
まだ色々な試行が必要ではありますが、こんなのも売っていこうと思います。
正直ロボカップ全く関係ないね。という訳で今日は手芸部の一日でした。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今日、Truthの世界大会組が旅立ちましたね。もうそんな季節か・・・。
今年の世界大会組も強豪ぞろいですので、きっと素晴らしい結果を出してくれるでしょう。
良い結果を期待しています。頑張ってください!
一方日本の産技高専では・・・。
部室まるごと持って行かれる可能性のあるような爆発物と戦っていました(笑)
というもの、昨日購入したLipo電池を充電してみようと思ったのですが、なんか独自規格だったらしく、
通常の充電器では充電ができなかったんです。
でもこれだけのために新しいのを買うのも馬鹿らしい・・・。
ということで既存のもので充電を試みようとしたのですが・・・りちうむいおんぽりまーですから、失敗したらどーんと行きます。
・・・という訳でレスキューの2階のフィールドが本物の爆発物試験場に早変わりしました。
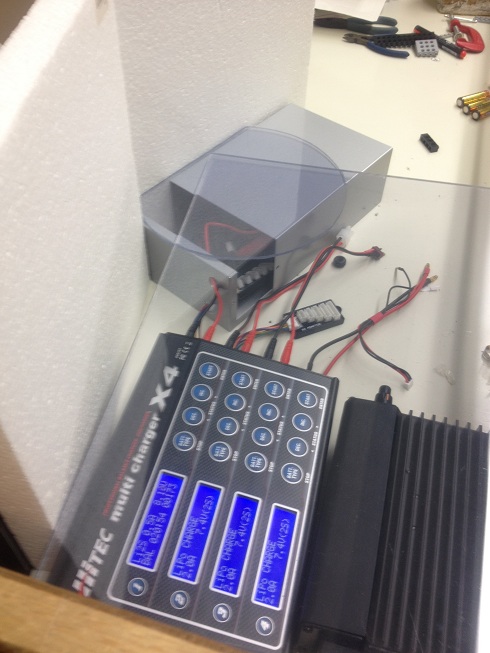
まさかこのフィールドに本当に危険物が置かれる日が来るだなんて・・・。
色々囲んで、電池を金属の箱に叩き込んだ上に上からアクリルで破片飛散を防止した状態での充電です。
やり過ぎかと思うかもしれませんが、これぐらいしないと部室では危険ですからね。
手元でいつでも電源が落とせるようにすることも忘れずに。まぁこれは電池側に電力が残っているので割と無駄なことですが。
そして、緊張の充電を行うこと40分。
なんとか電池も生還、充電を行うことができました。
結局何事もありませんでした。良かった良かった。
あとで調べてみたら、どうやら専用の充電機の方がよっぽど壊れやすそうで、此方のほうがまだ安全策だったようです。
という訳で今日はそんな電池との戦いをやっていました。それではまた。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今年の世界大会組も強豪ぞろいですので、きっと素晴らしい結果を出してくれるでしょう。
良い結果を期待しています。頑張ってください!
一方日本の産技高専では・・・。
部室まるごと持って行かれる可能性のあるような爆発物と戦っていました(笑)
というもの、昨日購入したLipo電池を充電してみようと思ったのですが、なんか独自規格だったらしく、
通常の充電器では充電ができなかったんです。
でもこれだけのために新しいのを買うのも馬鹿らしい・・・。
ということで既存のもので充電を試みようとしたのですが・・・りちうむいおんぽりまーですから、失敗したらどーんと行きます。
・・・という訳でレスキューの2階のフィールドが本物の爆発物試験場に早変わりしました。
まさかこのフィールドに本当に危険物が置かれる日が来るだなんて・・・。
色々囲んで、電池を金属の箱に叩き込んだ上に上からアクリルで破片飛散を防止した状態での充電です。
やり過ぎかと思うかもしれませんが、これぐらいしないと部室では危険ですからね。
手元でいつでも電源が落とせるようにすることも忘れずに。まぁこれは電池側に電力が残っているので割と無駄なことですが。
そして、緊張の充電を行うこと40分。
なんとか電池も生還、充電を行うことができました。
結局何事もありませんでした。良かった良かった。
あとで調べてみたら、どうやら専用の充電機の方がよっぽど壊れやすそうで、此方のほうがまだ安全策だったようです。
という訳で今日はそんな電池との戦いをやっていました。それではまた。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今、色々高専祭の売り物について模索しているところです。
部活的には結構あれやこれや、考えていて、大体今6つほど案が出ている状態です。
まぁまだ実際に販売するかは未定ですが、とりあえず今出ている素案だけ紹介します。
1:手芸部やってみた。
という訳で何故か手芸に乗り出しました。最近はなんでもLEDで光ればとりあえず売り物になるんじゃないか。
そういった残念な発想から生まれた何か。実用性皆無のキーホルダーです。
2:超音波センサー作ってみようか。
EZ-01を使ったNXT用の超音波センサーを作ってみるという話です。NXTのものより性能がよく、小型なのでいいけど
製作費が高い。赤字になる気がするので恐らくボツ
3:自作おーでーの
副部長が全責任をもって作ってくれます。なんかとんでもなく安く作れるんだとか。よし。高く売るか←
ホントは一年生の講習におーでーのを使った時の延長線です。
4:LineSumilator
名前の通りです。売り物になるかは疑問ですけどシュミレーター基、ちょっとしたプログラミングゲームを作りました。
一年生に1時間でものにされました。無念。今のところi7の4桁クラスの性能のPCでないとちゃんと動かないのが難点。
5:まるちぷれくさー
NXT用のマルチプレクサーです。RCXのセンサーとか、水銀センサーとか、RCXに繋げるセンサーなら全部使えます。
とりあえずいっぱいつなげるよ。
6:自作オムニ?
どっかのcuraud基craudがやるとかやらないとか。
よく考えるとこんなの彼にしか作れないよね。どうやって大量生産するんだろう。
とりあえず今出ているのはこのぐらいです。
まぁ全部やるか・・・というか、確実に2番はやらない雰囲気満載ですが、今年はこんな感じ+αでいこうと考えています。
因みに今年はサッカーレスキュー共に日曜日の開催しようと企んでいるので昨年以上の盛り上がりを期待しています。
部員も沢山いるし、運営も色々しっかりしようと思っているので昨年よりはマシになるんじゃないかなぁ。特に販売部門!
という訳で産技祭の告知第一弾はこの辺でー。以前にやりますって言ったから第二弾かな?
(^・ω・)ノ RadiumProduction in RoboCup Junior
部活的には結構あれやこれや、考えていて、大体今6つほど案が出ている状態です。
まぁまだ実際に販売するかは未定ですが、とりあえず今出ている素案だけ紹介します。
1:手芸部やってみた。
という訳で何故か手芸に乗り出しました。最近はなんでもLEDで光ればとりあえず売り物になるんじゃないか。
そういった残念な発想から生まれた何か。実用性皆無のキーホルダーです。
2:超音波センサー作ってみようか。
EZ-01を使ったNXT用の超音波センサーを作ってみるという話です。NXTのものより性能がよく、小型なのでいいけど
製作費が高い。赤字になる気がするので恐らくボツ
3:自作おーでーの
副部長が全責任をもって作ってくれます。なんかとんでもなく安く作れるんだとか。よし。高く売るか←
ホントは一年生の講習におーでーのを使った時の延長線です。
4:LineSumilator
名前の通りです。売り物になるかは疑問ですけどシュミレーター基、ちょっとしたプログラミングゲームを作りました。
一年生に1時間でものにされました。無念。今のところi7の4桁クラスの性能のPCでないとちゃんと動かないのが難点。
5:まるちぷれくさー
NXT用のマルチプレクサーです。RCXのセンサーとか、水銀センサーとか、RCXに繋げるセンサーなら全部使えます。
とりあえずいっぱいつなげるよ。
6:自作オムニ?
どっかのcuraud基craudがやるとかやらないとか。
よく考えるとこんなの彼にしか作れないよね。どうやって大量生産するんだろう。
とりあえず今出ているのはこのぐらいです。
まぁ全部やるか・・・というか、確実に2番はやらない雰囲気満載ですが、今年はこんな感じ+αでいこうと考えています。
因みに今年はサッカーレスキュー共に日曜日の開催しようと企んでいるので昨年以上の盛り上がりを期待しています。
部員も沢山いるし、運営も色々しっかりしようと思っているので昨年よりはマシになるんじゃないかなぁ。特に販売部門!
という訳で産技祭の告知第一弾はこの辺でー。以前にやりますって言ったから第二弾かな?
(^・ω・)ノ RadiumProduction in RoboCup Junior
要するにFETです。

この度、IRFI3205PBFというFETが秋月電子で発売されました。
IRFシリーズ。あんまり有名じゃないマイナーなFETだと思うのですがその性能は素晴らしいです。
2sk3140以上のかなりの大電流を流すことができ、オン抵抗もとても低い第5世代のHEXFETです。
そして価格も1個130円。2sk3140(300円)以上の性能で(低電流の場合)、この価格は流石といったところです。
最低ゲート電圧もなんと2V。信じられないくらい低いですよね。
また、応答速度、つまりFETのONOFFにかかる時間も此方のほうが圧倒的に速かったりします。
この性能でこの価格・・・買いですね。
これでモータードライバを作れば今よりもっと安くて良い物ができること間違いなしです。
今度コレでモータードライバ作ってみようかなぁ。なんて考えている今日この頃でした。
それでは今日はこの辺で
(^・ω・)ノ RadiumProduction in RoboCup Junior
この度、IRFI3205PBFというFETが秋月電子で発売されました。
IRFシリーズ。あんまり有名じゃないマイナーなFETだと思うのですがその性能は素晴らしいです。
2sk3140以上のかなりの大電流を流すことができ、オン抵抗もとても低い第5世代のHEXFETです。
そして価格も1個130円。2sk3140(300円)以上の性能で(低電流の場合)、この価格は流石といったところです。
最低ゲート電圧もなんと2V。信じられないくらい低いですよね。
また、応答速度、つまりFETのONOFFにかかる時間も此方のほうが圧倒的に速かったりします。
この性能でこの価格・・・買いですね。
これでモータードライバを作れば今よりもっと安くて良い物ができること間違いなしです。
今度コレでモータードライバ作ってみようかなぁ。なんて考えている今日この頃でした。
それでは今日はこの辺で
(^・ω・)ノ RadiumProduction in RoboCup Junior
突然ですが、I2Cの使えるデバイスって沢山ありますよね。
I2Cはバス構造になっているので、複数のデバイスを1つの通信網に接続することが出来ます。
でもそれは、デバイス同士の電圧が同じだったらの話です。
片方は5.0V用なのに、もう片方が3.3Vでは接続した際に、
出力電圧の違いのせいでデバイスが壊れてしまう可能性もありますよね。
そんな電圧の壁を解消してくれる素晴らしいモジュールが秋月電子から新発売されたようです。
それがコチラ。

I2C用の双方向電圧変換モジュールです。
つまり、動作電圧が違う2つのモジュールの間にコレを挟んでやると、簡単にI2C通信ができるようになるというものです。
以前自分がコレなしで電圧変換をやったときは死にそうになりましたが、これならあっという間・・・ですね。
しかも値段も200円と超お手頃です。
電圧レベルの変換は自動でやってくれるようなので面倒な設定などは一切不要です。
因みに150円のものも、ちょっと前に発売されました。

只、コチラはプルアップ抵抗が既についているので、デバイスによっては接続が困難になる場合もあるようです。
切断できますけどね。
後は電圧範囲がちょっと狭いのと、若干性能が・・・って辺りでしょうか。
試験が終わったら試しに一個買ってみようかな・・・。
という訳で今日はそんな新発売のモジュールの紹介でした。
(^・ω・)ノ RadiumProduction in RoboCup Junior
I2Cはバス構造になっているので、複数のデバイスを1つの通信網に接続することが出来ます。
でもそれは、デバイス同士の電圧が同じだったらの話です。
片方は5.0V用なのに、もう片方が3.3Vでは接続した際に、
出力電圧の違いのせいでデバイスが壊れてしまう可能性もありますよね。
そんな電圧の壁を解消してくれる素晴らしいモジュールが秋月電子から新発売されたようです。
それがコチラ。
I2C用の双方向電圧変換モジュールです。
つまり、動作電圧が違う2つのモジュールの間にコレを挟んでやると、簡単にI2C通信ができるようになるというものです。
以前自分がコレなしで電圧変換をやったときは死にそうになりましたが、これならあっという間・・・ですね。
しかも値段も200円と超お手頃です。
電圧レベルの変換は自動でやってくれるようなので面倒な設定などは一切不要です。
因みに150円のものも、ちょっと前に発売されました。
只、コチラはプルアップ抵抗が既についているので、デバイスによっては接続が困難になる場合もあるようです。
切断できますけどね。
後は電圧範囲がちょっと狭いのと、若干性能が・・・って辺りでしょうか。
試験が終わったら試しに一個買ってみようかな・・・。
という訳で今日はそんな新発売のモジュールの紹介でした。
(^・ω・)ノ RadiumProduction in RoboCup Junior
昨日は電ノコとドリルで機械科をやっていました。
そろそろプログラムに戻りたいけど、まだまだやることはあったり・・・
特に回路系の仕事が多いですね。
例えば、今写真部から受けている依頼で、ストロボの作成というのがあったりします。
ストロボっていうのは簡単にいうと、インスタントカメラのフラッシュに使われているアレですね。
アレの制御装置を作ることになったのですが、なかなか取り組めないのです。
特に難しい回路ではないのですが、できない。その理由は・・・
ストロボの入手です。
ストロボってそこら辺に転がっているものではないので、なかなか見つからないのです。
インスタントカメラを分解したら一発なのですが、なんか負けた気がして・・・。
そしてもうひとつ大きいのは絶縁問題。
というのもストロボには、200〜300vもの高電圧が必要になります。
当然、絶縁はしっかりしないとかなり危険な兵器になります。
ビニテぐるぐる巻きで対策できるかどうかちょっと微妙なので、これが凄く厄介なんです。
自分が使う分ならどうでもいいのですけどね・・・。
そんな感じで、全く回路が進む気がしない今日この頃でした。
(^・ω・)ノ RadiumProduction in RoboCup Junior
そろそろプログラムに戻りたいけど、まだまだやることはあったり・・・
特に回路系の仕事が多いですね。
例えば、今写真部から受けている依頼で、ストロボの作成というのがあったりします。
ストロボっていうのは簡単にいうと、インスタントカメラのフラッシュに使われているアレですね。
アレの制御装置を作ることになったのですが、なかなか取り組めないのです。
特に難しい回路ではないのですが、できない。その理由は・・・
ストロボの入手です。
ストロボってそこら辺に転がっているものではないので、なかなか見つからないのです。
インスタントカメラを分解したら一発なのですが、なんか負けた気がして・・・。
そしてもうひとつ大きいのは絶縁問題。
というのもストロボには、200〜300vもの高電圧が必要になります。
当然、絶縁はしっかりしないとかなり危険な兵器になります。
ビニテぐるぐる巻きで対策できるかどうかちょっと微妙なので、これが凄く厄介なんです。
自分が使う分ならどうでもいいのですけどね・・・。
そんな感じで、全く回路が進む気がしない今日この頃でした。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今回の内容は電池の最後、鉛畜電池についてです。
他の電池と比べると、その違いは大きく、まず、サイズが馬鹿でかいです。
それもそのはず、この電池は車のバッテリー等のデカブツに使われることが殆どなんです。
もちろん特徴は出力電流量、リチウムの比じゃありません。
しかも、容量も大きいので、大電力を長時間供給することができます。
また、メモリー効果も全く発生しないので寿命も長いです。
只、サルフェーションといって、鉛畜電池は、放電時に硫酸鉛が発生するのですが、それが結晶化して電池の寿命を減らす現象があったりします。
なので、使う際には常に継ぎ足しで、ほぼ残量100%の状態にするようにするのがベストです。
因みに、原材料が安いこともあって、二次電池の中では生産量はトップだったりします。
また、希硫酸を使っているタイプとシリコンを使っているタイプがありますが、
希硫酸のものはリチウムばりに危険なので気をつけて下さい。
また、1セル辺りの電圧は2Vです。よく6セルの12Vのものがありますよね。
こんなものが鉛畜電池です。
因みにほんとに重いのでロボカップだと使い道がありませんね。
(^・ω・)ノ RadiumProduction in RoboCup Junior
他の電池と比べると、その違いは大きく、まず、サイズが馬鹿でかいです。
それもそのはず、この電池は車のバッテリー等のデカブツに使われることが殆どなんです。
もちろん特徴は出力電流量、リチウムの比じゃありません。
しかも、容量も大きいので、大電力を長時間供給することができます。
また、メモリー効果も全く発生しないので寿命も長いです。
只、サルフェーションといって、鉛畜電池は、放電時に硫酸鉛が発生するのですが、それが結晶化して電池の寿命を減らす現象があったりします。
なので、使う際には常に継ぎ足しで、ほぼ残量100%の状態にするようにするのがベストです。
因みに、原材料が安いこともあって、二次電池の中では生産量はトップだったりします。
また、希硫酸を使っているタイプとシリコンを使っているタイプがありますが、
希硫酸のものはリチウムばりに危険なので気をつけて下さい。
また、1セル辺りの電圧は2Vです。よく6セルの12Vのものがありますよね。
こんなものが鉛畜電池です。
因みにほんとに重いのでロボカップだと使い道がありませんね。
(^・ω・)ノ RadiumProduction in RoboCup Junior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
(01/01)
(05/07)
(01/11)
(07/30)
(06/25)
プロフィール
HN:
Luz
性別:
男性
アーカイブ