RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
多方面からよく誤解されるのですが、
僕、実はNXTはまだ使い始めて一年経っているかどうか・・・ってぐらいだったりするんです。
最初に使ったのは2009のサマーチャレンジですが、その次は2010のサマーチャレンジ。
このあたりは非常に適当に作っていて、正直遊んでいるだけ・・・と言った具合でしょうか。
そこからようやく2011のロボットを作るために今から一年前くらいにようやくまともに触り始めました。
というのも、そもそも僕自身は世代が世代なのでNXTは持ってないし、高専に入学して暫くはPICの勉強をしたり、
その他H8とかSHとかAVRとかARMとかの勉強をしたりしていた割に、大会はRCXをだしたりしていたので
NXTにはほぼ触れてもいないような状態でした(笑)
つまり、副部長よりもNXT歴は短いんですよね。
っていうか去年の今頃までNXTの使い方まともに知ってすらいませんでしたから・・・。
本体でかーい。モーターでかーい。やだー。ぐらいの印象しかなかったと思います。
正直最初の方は使うつもりもなかったんだけどなぁ。なんで使ったんだっけ・・・。
まぁその去年からの惰性で今年も使っている訳ですが(笑)
それにしても、最近のNXTって凄いね。あんな速度でもライン読めちゃうんだ。
その事実を知っていたらもっと前からNXTにしたんだろうなぁ・・・。
という愚痴を書いて今日は終了です。実験やらなんやらで部活やる時間がない・・・><。土日に期待ですー
よく考えたら関東ブロックまであと10日ですね。頑張らないと・・・。間に合うのか?
(^・ω・)ノ RadiumProduction in RoboCup Junior
僕、実はNXTはまだ使い始めて一年経っているかどうか・・・ってぐらいだったりするんです。
最初に使ったのは2009のサマーチャレンジですが、その次は2010のサマーチャレンジ。
このあたりは非常に適当に作っていて、正直遊んでいるだけ・・・と言った具合でしょうか。
そこからようやく2011のロボットを作るために今から一年前くらいにようやくまともに触り始めました。
というのも、そもそも僕自身は世代が世代なのでNXTは持ってないし、高専に入学して暫くはPICの勉強をしたり、
その他H8とかSHとかAVRとかARMとかの勉強をしたりしていた割に、大会はRCXをだしたりしていたので
NXTにはほぼ触れてもいないような状態でした(笑)
つまり、副部長よりもNXT歴は短いんですよね。
っていうか去年の今頃までNXTの使い方まともに知ってすらいませんでしたから・・・。
本体でかーい。モーターでかーい。やだー。ぐらいの印象しかなかったと思います。
正直最初の方は使うつもりもなかったんだけどなぁ。なんで使ったんだっけ・・・。
まぁその去年からの惰性で今年も使っている訳ですが(笑)
それにしても、最近のNXTって凄いね。あんな速度でもライン読めちゃうんだ。
その事実を知っていたらもっと前からNXTにしたんだろうなぁ・・・。
という愚痴を書いて今日は終了です。実験やらなんやらで部活やる時間がない・・・><。土日に期待ですー
よく考えたら関東ブロックまであと10日ですね。頑張らないと・・・。間に合うのか?
(^・ω・)ノ RadiumProduction in RoboCup Junior
高専祭の時にあまりにの大活躍ぶりに電源を落とされるという悲劇にあったまっくでぢ。

先程、彼に新たなる機能が搭載されました。
それは・・・
「まわるまっくでぢ」
要するにジャイロセンサーを投入しました。
昨日一日がかりで副部長が頑張ってジャイロセンサーの実装をしていたので、
僕もなんかしたいなーと思った結果です。
んで、学校から帰って来て、プログラム書いたのですが、
大体3分ほどで出来ました。
恐らくプログラムを書く時間より、PCを起動して、BricxCCを開くまでの時間のほうが長いですね(笑)
さてと、ジャイロセンサー、副部長はロボットに実装をするようですけど、僕はどうしようかな・・・
とりあえず今日はその辺りをどうしようか悩んで終わりました。
まっくでぢよ永遠に・・・。
(^・ω・)ノ RadiumProduction in RoboCup Junior
P.sよく考えたらロボットが違うからプレゼン作りなおさないと!
先程、彼に新たなる機能が搭載されました。
それは・・・
「まわるまっくでぢ」
要するにジャイロセンサーを投入しました。
昨日一日がかりで副部長が頑張ってジャイロセンサーの実装をしていたので、
僕もなんかしたいなーと思った結果です。
んで、学校から帰って来て、プログラム書いたのですが、
大体3分ほどで出来ました。
恐らくプログラムを書く時間より、PCを起動して、BricxCCを開くまでの時間のほうが長いですね(笑)
さてと、ジャイロセンサー、副部長はロボットに実装をするようですけど、僕はどうしようかな・・・
とりあえず今日はその辺りをどうしようか悩んで終わりました。
まっくでぢよ永遠に・・・。
(^・ω・)ノ RadiumProduction in RoboCup Junior
P.sよく考えたらロボットが違うからプレゼン作りなおさないと!
コレどこいったか誰か知らない?

最近見ないんだけど・・・いらないから別にいいんだけどさ・・・。
(^・ω・)ノ RadiumProduction in RoboCup Junior
最近見ないんだけど・・・いらないから別にいいんだけどさ・・・。
(^・ω・)ノ RadiumProduction in RoboCup Junior
最近、そう思うようになってきました。
NXTって本気だすと速いな・・・(笑)
副部長のロボットも、ロボットそのものの速度は速いんですよね。
ライントレースになると、途端にRCXより遅くなっていましたけど・・・
それなのに、僕のロボット、前にも書きましたが、めっさ遅かったんですね。
100%で走っても、副部長のロボットに追いつけない・・・なんて話をしていたんです。
それでこの前、ブレーキになっていた部分を修正し、もう一度走らせてみたら、速くなった。
という話は以前したかと思います。
ところがここからが問題。
速すぎる(笑)
NXT・・。というよりLEGOは高性能のCPUを使用していながら、センサーの読み取り速度、
特にRCXのセンサーは特別仕様なので読み取り速度が極端に遅いのです。測定周期1ms以上あるんじゃないかな。
とにかくめっさ遅いんです。
そんな中で、あの速度のロボットをライントレース・・・
ハードウェア的に無理ですね・・・。この速度についていかせようと思ったらまずセンサーを変えないと。
という訳で、ライトセンサー高速化計画基、
LEGO用高速ライトセンサーでも作ろうかな。なんて考えています。
でも純正と同じように作ることはできないでしょう。ブロックのポッチ部分がつぶれてしまいますから・・・
なので恐らくですが、コレに搭載されている
緑センサーと似たようなものができるのではないかと思われます。
でもまぁどちらによ、センサーの読み取り速度を速めようと思ったら、NXTケーブルを使ったロボットになるか、
または外部で光源を設置する必要がありそうですね。
RCXのライトセンサーのように、いちいちチャージとかはしていられませんからね。
あれ?そうなるとプログラムだとNXTのライトセンサーの扱いになるのか?色々面倒だなぁ・・・
とりあえず、時間に余裕があれば作ってみようと思います。あれば・・・(苦笑)
なんかロボットの速度落とす方が確実な気がしてきたんだ。
それでは今日はこの辺で。どちらにせよ扱えないので速度はもうちょっと下げることにします。
(^・ω・)ノ RadiumProduction in RoboCup Junior
NXTって本気だすと速いな・・・(笑)
副部長のロボットも、ロボットそのものの速度は速いんですよね。
ライントレースになると、途端にRCXより遅くなっていましたけど・・・
それなのに、僕のロボット、前にも書きましたが、めっさ遅かったんですね。
100%で走っても、副部長のロボットに追いつけない・・・なんて話をしていたんです。
それでこの前、ブレーキになっていた部分を修正し、もう一度走らせてみたら、速くなった。
という話は以前したかと思います。
ところがここからが問題。
速すぎる(笑)
NXT・・。というよりLEGOは高性能のCPUを使用していながら、センサーの読み取り速度、
特にRCXのセンサーは特別仕様なので読み取り速度が極端に遅いのです。測定周期1ms以上あるんじゃないかな。
とにかくめっさ遅いんです。
そんな中で、あの速度のロボットをライントレース・・・
ハードウェア的に無理ですね・・・。この速度についていかせようと思ったらまずセンサーを変えないと。
という訳で、ライトセンサー高速化計画基、
LEGO用高速ライトセンサーでも作ろうかな。なんて考えています。
でも純正と同じように作ることはできないでしょう。ブロックのポッチ部分がつぶれてしまいますから・・・
なので恐らくですが、コレに搭載されている
緑センサーと似たようなものができるのではないかと思われます。
でもまぁどちらによ、センサーの読み取り速度を速めようと思ったら、NXTケーブルを使ったロボットになるか、
または外部で光源を設置する必要がありそうですね。
RCXのライトセンサーのように、いちいちチャージとかはしていられませんからね。
あれ?そうなるとプログラムだとNXTのライトセンサーの扱いになるのか?色々面倒だなぁ・・・
とりあえず、時間に余裕があれば作ってみようと思います。あれば・・・(苦笑)
なんかロボットの速度落とす方が確実な気がしてきたんだ。
それでは今日はこの辺で。どちらにせよ扱えないので速度はもうちょっと下げることにします。
(^・ω・)ノ RadiumProduction in RoboCup Junior
最後まで残ってたNXTを今日完全に直しました。
ちゃんとつくようになったよ!
なんとか・・ですね。秋葉行って、NXT直して・・・
って部活してねー!(笑)
とりあえず缶を避難場所に置くことができることを確認できたので、今日の活動は終了です。
それではー。
これらのNXTの話
(^・ω・)ノRadiumProduction in RoboCup Junior
ちゃんとつくようになったよ!
なんとか・・ですね。秋葉行って、NXT直して・・・
って部活してねー!(笑)
とりあえず缶を避難場所に置くことができることを確認できたので、今日の活動は終了です。
それではー。
これらのNXTの話
(^・ω・)ノRadiumProduction in RoboCup Junior
突然ですが、実はロボカップ部は結構大変なことになっています。
なんと、
NXTが3台、立て続けにお亡くなりになりました。

画面が付かない・・・
これに気が付いたのは実は結構前で、
話は今年の3月頃にまで遡ります。
当時、学校から借りているNXTが、全部でなんと3台もあったのですが、
大会に出る時に予備でもっていこうと、箱を漁っていたら・・・
なんと全滅であることが発覚。
本体自体は生きているようなのですが、電源を入れても起動音だけで画面が付かない・・・
このロボットは一昨年―当時の一年生、つまり僕の同期のメンバーがサッカーに出るとき、
そして某レスキューチームの水泳部部員がサマーチャレンジの時に借りたNXTなんですね。
その時は別に故障のこの字もなかったのですが、なぜか、つけてびっくりつかないよー><。
といった状況です。保存もちゃんと箱に入れておいてあったのに・・・なんで?理由もいまいちわかりません。
とりあえずこれは非常にまずい雰囲気だったので原因究明に入った訳です。
まぁそんな経緯があって、NXTの解析作業を行い始めました。
それから4か月・・・つまり今ですね。
ようやく、25200円×3個の尊い命の蘇生に成功しました。
心肺停止の確認から4か月・・・人間だったらとうに死んでいますね。流石NXT(笑)
過去にRCXの蘇生手術をしたこともありましたが、正直あっちの方がまだ全然楽ですね・・・
正直言ってこれの蘇生は人間業ではないです(汗)
細いこて先を持っていない自分は、幅1㎜以上あるはんだごてやはんだで、
0.5mmのピッチのある基盤と戦ったのですから当然・・なのかな?
それにしてもNXTといっても中身は結構適当なんですね。
はんだつけされていない箇所とかがいくつも、みられて、とても杜撰な製造であることが明らかになりました。
そりゃ壊れるわ・・・。
RCXは結構細かいところまでしっかりしていたんだけどなぁ。やっぱり時代の流れですかねぇ(中○的な意味で)
「NXTなんてこんなもん」と思わせるには十分、といってしまえばそれまでですが、でもやっぱり・・ねぇ。
まぁ、仕方ないか・・・。
という訳で今日は、3台(一台微妙だけど)のNXT蘇生に成功しました。という記事でした。
それではー、
一部地域を除くアナログ放送完全終了お疲れ様でした!最後の放送は見られたかな!?
(^・ω・)ノ RadiumProduction in RoboCup Junior
なんと、
NXTが3台、立て続けにお亡くなりになりました。
画面が付かない・・・
これに気が付いたのは実は結構前で、
話は今年の3月頃にまで遡ります。
当時、学校から借りているNXTが、全部でなんと3台もあったのですが、
大会に出る時に予備でもっていこうと、箱を漁っていたら・・・
なんと全滅であることが発覚。
本体自体は生きているようなのですが、電源を入れても起動音だけで画面が付かない・・・
このロボットは一昨年―当時の一年生、つまり僕の同期のメンバーがサッカーに出るとき、
そして某レスキューチームの水泳部部員がサマーチャレンジの時に借りたNXTなんですね。
その時は別に故障のこの字もなかったのですが、なぜか、つけてびっくりつかないよー><。
といった状況です。保存もちゃんと箱に入れておいてあったのに・・・なんで?理由もいまいちわかりません。
とりあえずこれは非常にまずい雰囲気だったので原因究明に入った訳です。
まぁそんな経緯があって、NXTの解析作業を行い始めました。
それから4か月・・・つまり今ですね。
ようやく、25200円×3個の尊い命の蘇生に成功しました。
心肺停止の確認から4か月・・・人間だったらとうに死んでいますね。流石NXT(笑)
過去にRCXの蘇生手術をしたこともありましたが、正直あっちの方がまだ全然楽ですね・・・
正直言ってこれの蘇生は人間業ではないです(汗)
細いこて先を持っていない自分は、幅1㎜以上あるはんだごてやはんだで、
0.5mmのピッチのある基盤と戦ったのですから当然・・なのかな?
それにしてもNXTといっても中身は結構適当なんですね。
はんだつけされていない箇所とかがいくつも、みられて、とても杜撰な製造であることが明らかになりました。
そりゃ壊れるわ・・・。
RCXは結構細かいところまでしっかりしていたんだけどなぁ。やっぱり時代の流れですかねぇ(中○的な意味で)
「NXTなんてこんなもん」と思わせるには十分、といってしまえばそれまでですが、でもやっぱり・・ねぇ。
まぁ、仕方ないか・・・。
という訳で今日は、3台(一台微妙だけど)のNXT蘇生に成功しました。という記事でした。
それではー、
一部地域を除くアナログ放送完全終了お疲れ様でした!最後の放送は見られたかな!?
(^・ω・)ノ RadiumProduction in RoboCup Junior
昔昔、あるところに・・・
NXTの新型バッテリーに関しての記事がありました。
その記事には、こう書かれていました。
「NXTの新型バッテリーが出ました。様子を見て、今度買ってみようかな・・・」
あの記事以来まったく何も話していないのですが、実は今回の大会で、
この新型バッテリーを使用していました。

昨年度の最後の予算で顧問の先生に買って頂きました(笑)
それでこの新型のバッテリー、なんで買ったかといいますと」、
回路を外付けしたので「極度の電流不足になってしまったから」なのです。
というのも、旧型のバッテリーが1400mA/hなのに対し、新型は2100mA/hなので約1.5倍、相当違います。
まぁそれが理由で今回のロボットはこの新型バッテリーを採用しました。
ところで、この新型と灰色の旧型、一体何が違うのでしょう。
まぁ充電の方式とか、中のセルに違いがあるのですが、とろあえずここでは物としての性能の違いではなく
結果として「何が違うのか」を紹介します。
まず当然電流量が違うからモーターの速度は当然変わるだろう。と思いますよね。
実は、これは変わりません。NXT自体がモーターに送れる電流量の上限をセットしているみたいです。
そんでもって充電時間。
どうにもこれも変わらないようです。うん、どっちも3時間だね。
じゃあ結局何が違うのか。
それは、一回の充電でもつ電池の時間と電池そのものの寿命です。
まぁまぁ要するに長持ちするようになったんですね。当社比1.5倍なんだとか。
んでなんで電池が長持ちするだけでなく、電池の寿命も延びたのか。という話ですが、
まずその前に充電池の寿命の話をチョットしましょう。
電池の寿命といえば、電池が使えなくなる状態を指しますよね。
これは充電池の場合、充電ができなくなる状態を指します。
なんで寿命が縮む=充電できる量が少なくなる。と考えれば大丈夫かと思います。
ちょっと前の時代に充電池としてよく使われていたNiCd(ニッケルカドニウム:通常ニカド)電池とかだと
継ぎ足し充電をすればするほど寿命は縮みます。
今でも”えねるーぷ”等に使用されているNiMH(ニッケル水素:通称日水)電池とかだと
充電後に長時間放置したり(これを自由放電といいます)、
過充電(充電のしすぎ)や完全放電(完全に電池を使い切る)と寿命は減っていきます。
この継ぎ足し充電や自由放電で寿命が縮むことをバッテリーの「メモリー効果」とか言ったりします。
じゃあこのNXTの充電池に使われているLipo(Lithium ion polymer:通称リポ)電池はどうかというと、
まず、完全放電で100%死にます。これは絶対禁止です。
でもメモリー効果は起こしません。よってこれらの行為で寿命が縮むことはありません。
でもその代り、温度の上昇にむっちゃ弱いです。
充電中に電池の温度が上がったりすると、寿命が縮みます。
まぁ充電すればどんな電池でも多少の発熱はありますから、
そういう意味では充電すればするほど寿命は消えていきますね。
それでも他の充電池よりははるかに寿命は長いですけど。
そんでもってなんでNXTの新型電池は旧型電池より寿命が長いかというと・・・もうわかりますね。
充電時の発熱が圧倒的に少ないからです。
という訳で長持ちする。という訳です。
因みにリポは一歩間違うとこうなるので注意してください
まぁ今回はそんな感じで電池の話でした。
最後に充電できる電池を二次電池、充電できない乾電池などを一次電池と呼ぶんですなんて豆知識を加えてみたり。
それではー
(^・ω・)ノRadiumProduction in RoboCupJunior
NXTの新型バッテリーに関しての記事がありました。
その記事には、こう書かれていました。
「NXTの新型バッテリーが出ました。様子を見て、今度買ってみようかな・・・」
あの記事以来まったく何も話していないのですが、実は今回の大会で、
この新型バッテリーを使用していました。
昨年度の最後の予算で顧問の先生に買って頂きました(笑)
それでこの新型のバッテリー、なんで買ったかといいますと」、
回路を外付けしたので「極度の電流不足になってしまったから」なのです。
というのも、旧型のバッテリーが1400mA/hなのに対し、新型は2100mA/hなので約1.5倍、相当違います。
まぁそれが理由で今回のロボットはこの新型バッテリーを採用しました。
ところで、この新型と灰色の旧型、一体何が違うのでしょう。
まぁ充電の方式とか、中のセルに違いがあるのですが、とろあえずここでは物としての性能の違いではなく
結果として「何が違うのか」を紹介します。
まず当然電流量が違うからモーターの速度は当然変わるだろう。と思いますよね。
実は、これは変わりません。NXT自体がモーターに送れる電流量の上限をセットしているみたいです。
そんでもって充電時間。
どうにもこれも変わらないようです。うん、どっちも3時間だね。
じゃあ結局何が違うのか。
それは、一回の充電でもつ電池の時間と電池そのものの寿命です。
まぁまぁ要するに長持ちするようになったんですね。当社比1.5倍なんだとか。
んでなんで電池が長持ちするだけでなく、電池の寿命も延びたのか。という話ですが、
まずその前に充電池の寿命の話をチョットしましょう。
電池の寿命といえば、電池が使えなくなる状態を指しますよね。
これは充電池の場合、充電ができなくなる状態を指します。
なんで寿命が縮む=充電できる量が少なくなる。と考えれば大丈夫かと思います。
ちょっと前の時代に充電池としてよく使われていたNiCd(ニッケルカドニウム:通常ニカド)電池とかだと
継ぎ足し充電をすればするほど寿命は縮みます。
今でも”えねるーぷ”等に使用されているNiMH(ニッケル水素:通称日水)電池とかだと
充電後に長時間放置したり(これを自由放電といいます)、
過充電(充電のしすぎ)や完全放電(完全に電池を使い切る)と寿命は減っていきます。
この継ぎ足し充電や自由放電で寿命が縮むことをバッテリーの「メモリー効果」とか言ったりします。
じゃあこのNXTの充電池に使われているLipo(Lithium ion polymer:通称リポ)電池はどうかというと、
まず、完全放電で100%死にます。これは絶対禁止です。
でもメモリー効果は起こしません。よってこれらの行為で寿命が縮むことはありません。
でもその代り、温度の上昇にむっちゃ弱いです。
充電中に電池の温度が上がったりすると、寿命が縮みます。
まぁ充電すればどんな電池でも多少の発熱はありますから、
そういう意味では充電すればするほど寿命は消えていきますね。
それでも他の充電池よりははるかに寿命は長いですけど。
そんでもってなんでNXTの新型電池は旧型電池より寿命が長いかというと・・・もうわかりますね。
充電時の発熱が圧倒的に少ないからです。
という訳で長持ちする。という訳です。
因みにリポは一歩間違うとこうなるので注意してください
まぁ今回はそんな感じで電池の話でした。
最後に充電できる電池を二次電池、充電できない乾電池などを一次電池と呼ぶんですなんて豆知識を加えてみたり。
それではー
(^・ω・)ノRadiumProduction in RoboCupJunior
色々やってはみたけれど、
やっぱり噂どおり、NXCの付属関数ではハイテックのI2Cセンサーは重ねづけ(ライン)はできないようですね・・・
というよりアクセルとジャイロが無理?超音波もできないという話を聞いています。
そういえばNXCでI2Cのライン制御はしたことがありませんでしたね。まさか本当にできないとは・・・。
他のソフトだとできるんですけどね。RobotCとか・・・NXCだけ特殊なのでしょうか?
多分センサーの値読みの関数そのものに問題があるんでしょうね。他のソフトでできるならNXCでもできるはずです。
ちょっと暫くはそっちの研究に時間をとられそうです。後ロボコンとか・・・
まぁできたらできたで報告します。できなかったら・・・恐らく水に流します(笑)
とりあえずまずはこの前作った自作関数で試してみようかと思っています。
それではー。
追記:ソフト欠陥じゃなくてそもそもこの子たちのI2Cのアドレスが全部統一だったようです。
そりゃ無理なわけだ・・・。
(^・ω・)ノRadiumProduction in RoboCupJunior
やっぱり噂どおり、NXCの付属関数ではハイテックのI2Cセンサーは重ねづけ(ライン)はできないようですね・・・
というよりアクセルとジャイロが無理?超音波もできないという話を聞いています。
そういえばNXCでI2Cのライン制御はしたことがありませんでしたね。まさか本当にできないとは・・・。
他のソフトだとできるんですけどね。RobotCとか・・・NXCだけ特殊なのでしょうか?
多分センサーの値読みの関数そのものに問題があるんでしょうね。他のソフトでできるならNXCでもできるはずです。
ちょっと暫くはそっちの研究に時間をとられそうです。後ロボコンとか・・・
まぁできたらできたで報告します。できなかったら・・・恐らく水に流します(笑)
とりあえずまずはこの前作った自作関数で試してみようかと思っています。
それではー。
追記:ソフト欠陥じゃなくてそもそもこの子たちのI2Cのアドレスが全部統一だったようです。
そりゃ無理なわけだ・・・。
(^・ω・)ノRadiumProduction in RoboCupJunior
今は亡きLuz。
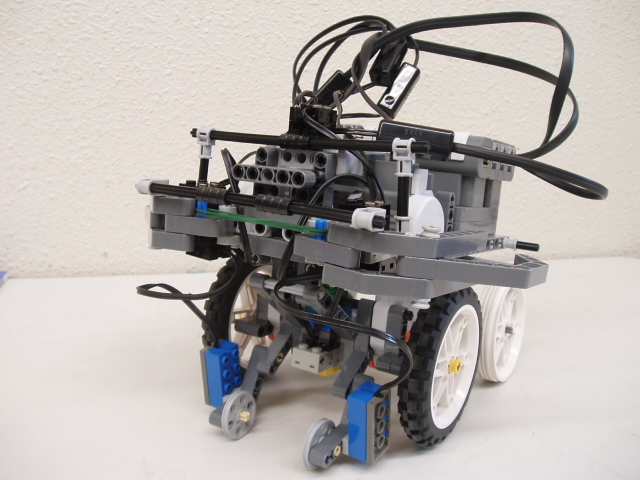
今日はそのLuzのロボットについて紹介します。
今年のLuzのロボットは前にも紹介しましたが、
実はあのロボットは東東京ノード終了時点で既に廃棄処分となっていました。
その代わりに作られたのがこのロボットです。
東東京ノードの時よりさらに大きく、うるさくなりました。
まぁ今はもう原型が残っていないんですけどね(笑)
バンプが越えられない旧型のクローラーから離脱。駆動系はタイヤで統一しました。
まぁでも後の機能は旧型と大差ありません。
ところで、このロボット、どうやって缶をつかむかというと・・・
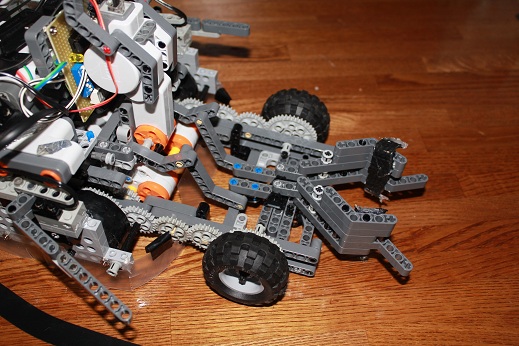
こんな感じです。
後ろに搭載したモーターで可動2輪の可動とアームの開閉を行います。
ギアダウンとかしていないのでアームの可動速度が異常です。もちろん、普通に掴めますよ。
結局今年は、この可動2輪がしたかっただけなんです(笑)ほら、なんかロマンっぽいじゃないですか。
でもその結果、ロボットが大きくなりすぎて
可動2輪の尻尾がライントレース中に壁にぶつかりまくり、競技進行停止の嵐。
只でさえ大きくてギリギリなのに、
前日に起きた故障の修正をした際に回転軸が以前より前になってしまったのも痛いです。
でも、ぶっっちゃけ可動2輪とアーム外したら普通にライントレースして
それで十分ジャパンオープン選考内に入ることはできました。
でもなんかそれで勝ってもつまんないなーと思い、このまま突撃しました。
まぁ今回の大会はそんな感じです。ちょっと遊びすぎたかなー(笑)
といった経緯で関東ブロックで玉砕してきました。いつも通りの結果ですね(笑)
来年こそはウン年ぶりにジャパンオープンに出場できたらと考えています。
世界大会といいたいのですがちょっと現実みようよ。って感じですかね(笑)
それでは今日はこの辺で。
明日から電気工事士試験の講習だ・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
今日はそのLuzのロボットについて紹介します。
今年のLuzのロボットは前にも紹介しましたが、
実はあのロボットは東東京ノード終了時点で既に廃棄処分となっていました。
その代わりに作られたのがこのロボットです。
東東京ノードの時よりさらに大きく、うるさくなりました。
まぁ今はもう原型が残っていないんですけどね(笑)
バンプが越えられない旧型のクローラーから離脱。駆動系はタイヤで統一しました。
まぁでも後の機能は旧型と大差ありません。
ところで、このロボット、どうやって缶をつかむかというと・・・
こんな感じです。
後ろに搭載したモーターで可動2輪の可動とアームの開閉を行います。
ギアダウンとかしていないのでアームの可動速度が異常です。もちろん、普通に掴めますよ。
結局今年は、この可動2輪がしたかっただけなんです(笑)ほら、なんかロマンっぽいじゃないですか。
でもその結果、ロボットが大きくなりすぎて
可動2輪の尻尾がライントレース中に壁にぶつかりまくり、競技進行停止の嵐。
只でさえ大きくてギリギリなのに、
前日に起きた故障の修正をした際に回転軸が以前より前になってしまったのも痛いです。
でも、ぶっっちゃけ可動2輪とアーム外したら普通にライントレースして
それで十分ジャパンオープン選考内に入ることはできました。
でもなんかそれで勝ってもつまんないなーと思い、このまま突撃しました。
まぁ今回の大会はそんな感じです。ちょっと遊びすぎたかなー(笑)
といった経緯で関東ブロックで玉砕してきました。いつも通りの結果ですね(笑)
来年こそはウン年ぶりにジャパンオープンに出場できたらと考えています。
世界大会といいたいのですがちょっと現実みようよ。って感じですかね(笑)
それでは今日はこの辺で。
明日から電気工事士試験の講習だ・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
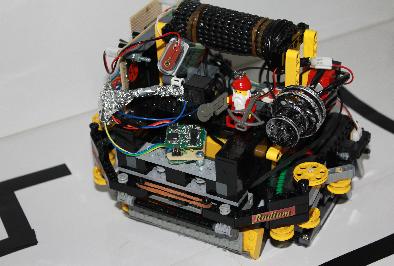
とりあえず恐らく最後になるであろうサマーチャレンジのロボットの紹介です。
今回は今までのサマーチャレンジと違って、城塞の隠し部屋の中にあるもの。
それは缶でした。

今回はそれを掴んで持ってくるというシナリオでしたね。
そして、これが去年2010年度のサマーチャレンジに出場したロボットの写真です。

まさかの携帯撮りしか残ってない不思議。
いかにサマーチャレンジに対してのやる気がないかがわかりますね。
基本的にサマーチャレンジのロボットは適当なんです。
でも、この時のロボットは今まででは一番まともでだったんですよ。特にライトセンサーが。
缶をつかむ機構もしっかりできてました。
初サマーチャレンジでまともなロボットが?と思ったら、
缶の掴む機構とロボットがくっつかない・・・orz
結果が上の写真です。
残念ですねー。よく転んでましたよ(笑)
っていうか挙句缶のある隠し部屋が狭すぎて、缶の掴む機構が使えないっていう・・・
どうしてこうなった。一番何もできなかったロボットですね。
っていうか本当は超音波センサーと方位センサーを使ってみたかっただけなんですが。
とてもまともにゃ動きませんでしたね。まだまだNXT使いが甘かったころです。
因みにこのロボットは今も黒歴史として部室に封印されています。
解体する気すら起こらないようなロボットだったので・・・
でも部品取りにされて段々形がなくなってきています。
今回もヘタレ機作っちゃったなー。
でも上からガシャンとやる、あの缶の機構は新しかったと信じています←
では今日はこの辺でノ
①
②
③
(^・ω・)ノRadiumProduction in RoboCupJunior
今回は今までのサマーチャレンジと違って、城塞の隠し部屋の中にあるもの。
それは缶でした。
今回はそれを掴んで持ってくるというシナリオでしたね。
そして、これが去年2010年度のサマーチャレンジに出場したロボットの写真です。
まさかの携帯撮りしか残ってない不思議。
いかにサマーチャレンジに対してのやる気がないかがわかりますね。
基本的にサマーチャレンジのロボットは適当なんです。
でも、この時のロボットは今まででは一番まともでだったんですよ。特にライトセンサーが。
缶をつかむ機構もしっかりできてました。
初サマーチャレンジでまともなロボットが?と思ったら、
缶の掴む機構とロボットがくっつかない・・・orz
結果が上の写真です。
残念ですねー。よく転んでましたよ(笑)
っていうか挙句缶のある隠し部屋が狭すぎて、缶の掴む機構が使えないっていう・・・
どうしてこうなった。一番何もできなかったロボットですね。
っていうか本当は超音波センサーと方位センサーを使ってみたかっただけなんですが。
とてもまともにゃ動きませんでしたね。まだまだNXT使いが甘かったころです。
因みにこのロボットは今も黒歴史として部室に封印されています。
解体する気すら起こらないようなロボットだったので・・・
でも部品取りにされて段々形がなくなってきています。
今回もヘタレ機作っちゃったなー。
でも上からガシャンとやる、あの缶の機構は新しかったと信じています←
では今日はこの辺でノ
①
②
③
(^・ω・)ノRadiumProduction in RoboCupJunior
とりあえず始めたはいいけどこのサマチャレロボットの紹介に何の意味も見いだせない今日この頃です。
というわけで、とっととこのシリーズを終わらせたいとか考えています。
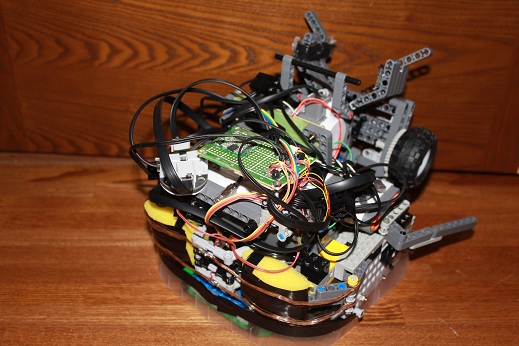
今日紹介するロボットのは一昨年、つまり2009年度に参加した際のロボットです。
どんなものかというと・・・
この年の城塞は中に部屋があり、その部屋の中で赤外線パルスボールがコロコロしてて
それを取ってくる。というものでした。
それでこの年のロボットですが、今まで、タイヤ、アームときたので次は・・・
クローラー。ですよね!?
このロボットの全体像はこちら。
それにしてもまた作りが雑ですね。特にライトセンサーとかとか。
いかにサマーチャレンジに対してのやる気がないかがわかりますね。
基本的にサマーチャレンジのロボットは適当なんです。
あと大径タイヤってあたりが酷さを拡大させているような・・・
高専1年なんだからせめてもうちょっとまともなもん作れよ。自分。
しかもこの年すごかったのが、
本番当日まで調整ナシ。
この年のサマーチャレンジは、フィールドそのものが無茶苦茶大きくて、
それだけで調整する気失せたんですね。
それにこのときは色々と別方面に走ってたからなぁ・・・PICとかPICとかPICとか
もちろん結果はどっかーん。
まぁよくボールとれたよなー。って驚きましたね。確か出口で転んでたけど。
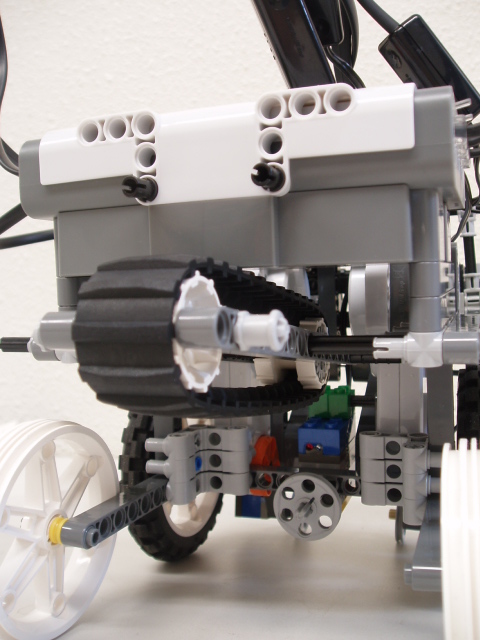
ちなみにクローラーの回転機構はこうなっています。

頭を使わないとこうなるのです。
でわでわーノ
①
②
④
というわけで、とっととこのシリーズを終わらせたいとか考えています。
今日紹介するロボットのは一昨年、つまり2009年度に参加した際のロボットです。
どんなものかというと・・・
この年の城塞は中に部屋があり、その部屋の中で赤外線パルスボールがコロコロしてて
それを取ってくる。というものでした。
それでこの年のロボットですが、今まで、タイヤ、アームときたので次は・・・
クローラー。ですよね!?
このロボットの全体像はこちら。
それにしてもまた作りが雑ですね。特にライトセンサーとかとか。
いかにサマーチャレンジに対してのやる気がないかがわかりますね。
基本的にサマーチャレンジのロボットは適当なんです。
あと大径タイヤってあたりが酷さを拡大させているような・・・
高専1年なんだからせめてもうちょっとまともなもん作れよ。自分。
しかもこの年すごかったのが、
本番当日まで調整ナシ。
この年のサマーチャレンジは、フィールドそのものが無茶苦茶大きくて、
それだけで調整する気失せたんですね。
それにこのときは色々と別方面に走ってたからなぁ・・・PICとかPICとかPICとか
もちろん結果はどっかーん。
まぁよくボールとれたよなー。って驚きましたね。確か出口で転んでたけど。
ちなみにクローラーの回転機構はこうなっています。
頭を使わないとこうなるのです。
でわでわーノ
①
②
④
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
(01/01)
(05/07)
(01/11)
(07/30)
(06/25)
プロフィール
HN:
Luz
性別:
男性
アーカイブ