RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
過去の(黒)歴史を掘り起こすのが部内でかるーくブームになっている雰囲気があったので書いてみることに。
過去に参加した大会の中で唯一まだこのブログで紹介していなかったのが、この2006年だったので
今日はそれについてお話します。
2006年と言うと・・・あの時は・・・トゥルース一年目の最後だったかなぁ。
トゥルースとしては初めての、2回目の大会だったように思えます。
あの時の僕とTAKUMIで飯田橋のレスキュー一期生になりますね。確か机でフィールドを作っていたころの話ですから・・・
・・・あの頃から飯田橋の意味不明なくらい曲がりくねった直角だらけのレスキューコースが健在でした。
っていうかアレは完全にTAKUMIの暴走だったんですけどね。
当時は坂にもラインがありましたから、坂中に直角とか作って走らせていました。今思えばよくあんなのクリアしたなぁ・・・
それで、その一年前の出場者3人のレスキューを知っていた自分は
今年もそんなもんなのかなぁとタカをくくっていたのですが・・・
あれー。20人?なんかよくわかりませんが、この年になって急に参加者が増えました。
去年の成績も成績だったので結構やばいなーなんて思いつつ、のんびりと競技していたら・・あれー?
優勝してました(笑)未だにあの優勝は何があったのか不明です。因みに3位はTeamTAKUMIでしたねぇ。
・・・。いつの間にかノードのレベルを追い抜いてたの?という気持ちになりましたね。
正直二人揃って玉砕するつもりだったのですが、玉砕どころか・・・あれ?みたいな。
本当にあの時は一体何が起こったのでしょうね。不思議でたまらない。
そしてその後の関東ブロック。
崩れ去りましたorz
確かクローラーが外れて、坂が・・・どうなったっけ?なんて感じだったかと思います。それで9位(だったはず)。
そのときを境にクローラーを使わなくなったんですよね。とても危なっかしかったので・・・。
その後やはりRCXのロボットはクローラーよりタイヤのほうが優勢になって、
RCXタイヤロボットの時代がその後何年か続くんですよね(関東圏では)
でもNXTが普及してからは、今度はまたクローラーが普及し始めてて・・・
なんか今、NXTって全部クローラーじゃないですか?
NXTでタイヤロボットを作ってるのって・・・知ってる限りだと4,5チームぐらいしかいないんですけど・・・。
しかも現在のレスキューAで高順位にいるタイヤって・・Lα+だけ?
僕は2006でこんなことがあった上に、2011でも事故ったので、昔(2007から)からずっとタイヤなのですが、
なんでこんなにクローラーって流行ってるんでしょうねぇ・・・。
個人的には理解できなかったり。坂上るのも、バンプ超えるのも、タイヤの方がやりやすいのに・・・。
やっぱりこれだけ長くレスキューやっていると、慣例にすら疑問を持ってしまう今日この頃でした。
(^・ω・)ノRadiumProduction in RoboCup Junior
過去に参加した大会の中で唯一まだこのブログで紹介していなかったのが、この2006年だったので
今日はそれについてお話します。
2006年と言うと・・・あの時は・・・トゥルース一年目の最後だったかなぁ。
トゥルースとしては初めての、2回目の大会だったように思えます。
あの時の僕とTAKUMIで飯田橋のレスキュー一期生になりますね。確か机でフィールドを作っていたころの話ですから・・・
・・・あの頃から飯田橋の意味不明なくらい曲がりくねった直角だらけのレスキューコースが健在でした。
っていうかアレは完全にTAKUMIの暴走だったんですけどね。
当時は坂にもラインがありましたから、坂中に直角とか作って走らせていました。今思えばよくあんなのクリアしたなぁ・・・
それで、その一年前の出場者3人のレスキューを知っていた自分は
今年もそんなもんなのかなぁとタカをくくっていたのですが・・・
あれー。20人?なんかよくわかりませんが、この年になって急に参加者が増えました。
去年の成績も成績だったので結構やばいなーなんて思いつつ、のんびりと競技していたら・・あれー?
優勝してました(笑)未だにあの優勝は何があったのか不明です。因みに3位はTeamTAKUMIでしたねぇ。
・・・。いつの間にかノードのレベルを追い抜いてたの?という気持ちになりましたね。
正直二人揃って玉砕するつもりだったのですが、玉砕どころか・・・あれ?みたいな。
本当にあの時は一体何が起こったのでしょうね。不思議でたまらない。
そしてその後の関東ブロック。
崩れ去りましたorz
確かクローラーが外れて、坂が・・・どうなったっけ?なんて感じだったかと思います。それで9位(だったはず)。
そのときを境にクローラーを使わなくなったんですよね。とても危なっかしかったので・・・。
その後やはりRCXのロボットはクローラーよりタイヤのほうが優勢になって、
RCXタイヤロボットの時代がその後何年か続くんですよね(関東圏では)
でもNXTが普及してからは、今度はまたクローラーが普及し始めてて・・・
なんか今、NXTって全部クローラーじゃないですか?
NXTでタイヤロボットを作ってるのって・・・知ってる限りだと4,5チームぐらいしかいないんですけど・・・。
しかも現在のレスキューAで高順位にいるタイヤって・・Lα+だけ?
僕は2006でこんなことがあった上に、2011でも事故ったので、昔(2007から)からずっとタイヤなのですが、
なんでこんなにクローラーって流行ってるんでしょうねぇ・・・。
個人的には理解できなかったり。坂上るのも、バンプ超えるのも、タイヤの方がやりやすいのに・・・。
やっぱりこれだけ長くレスキューやっていると、慣例にすら疑問を持ってしまう今日この頃でした。
(^・ω・)ノRadiumProduction in RoboCup Junior
とりあえず学校で携帯を入手(というより救出)しました。普通にフィールドの上にあったんですけど・・・。
それで今は新しい重心の低いロボットを作ろうとしているのですが・・・。
いや、ロボット自体はできてきているんですよ?そうなんですけど・・・。
重心を下げるためにNXTをそのまま真下に下ろしたら・・・。
世界大会とかによく出場されている某チーム様のいつものロボットのような形状に・・・なっているような・・・、なっていないような・・・。
とてつもなく劣化コピーみたいになっているんです(苦笑)
これ・・・どうしよう・・・。
(^・ω・)ノ RadiumProduction in RoboCup Junior
それで今は新しい重心の低いロボットを作ろうとしているのですが・・・。
いや、ロボット自体はできてきているんですよ?そうなんですけど・・・。
重心を下げるためにNXTをそのまま真下に下ろしたら・・・。
世界大会とかによく出場されている某チーム様のいつものロボットのような形状に・・・なっているような・・・、なっていないような・・・。
とてつもなく劣化コピーみたいになっているんです(苦笑)
これ・・・どうしよう・・・。
(^・ω・)ノ RadiumProduction in RoboCup Junior
いやなんか重かったので・・・。なかったことにしました。
そもそも置く場所がなかったもので・・・。
まず競技の時に電源入れ忘れて結局使ってないしね!
という訳で、敬礼した後、隠居してもらうことになりました。
因みにそれ以外は特に変更はありません。あ。バンパーがまた変わったかな?
とにかくバンパーがよく変わるロボットですね。因みに週明けにもっかいバンパーは変わりますよー。
それぐらいしか書くことが無いので今日はこのへんで
(^・ω・)ノ RadiumProduction in RoboCup Junior
そもそも置く場所がなかったもので・・・。
まず競技の時に電源入れ忘れて結局使ってないしね!
という訳で、敬礼した後、隠居してもらうことになりました。
因みにそれ以外は特に変更はありません。あ。バンパーがまた変わったかな?
とにかくバンパーがよく変わるロボットですね。因みに週明けにもっかいバンパーは変わりますよー。
それぐらいしか書くことが無いので今日はこのへんで
(^・ω・)ノ RadiumProduction in RoboCup Junior
3連休にもかかわらず、携帯電話を部室でなくしたくさいです。あーあ。やっちゃった・・・(苦笑)
関東ブロックが終わってからというもの、どんどんロボットの悪いところが浮上してきていて、
このまま作りなおすのではないか?というところまできてしまっています。
でもそれも面倒なので、2台並行作成でもしようかな・・・というのが今一番狙っている方向です。
とりあえず関東ブロックにだしたロボット、ちょっとセンサーの配線を変えて、センサーの数を増やして、
そんな感じで改造をするのと、
もう一台。もっと重心の低いロボットをつくってみようと思います。
とりあえず来週の月曜日に新しいロボットをつくってみようかな。
とにかく坂が登れないロボットはもうちょっと嫌なので・・・(苦笑)
一先ず今日はこのへんで
(^・ω・)ノ RadiumProduction in RoboCup Junior
関東ブロックが終わってからというもの、どんどんロボットの悪いところが浮上してきていて、
このまま作りなおすのではないか?というところまできてしまっています。
でもそれも面倒なので、2台並行作成でもしようかな・・・というのが今一番狙っている方向です。
とりあえず関東ブロックにだしたロボット、ちょっとセンサーの配線を変えて、センサーの数を増やして、
そんな感じで改造をするのと、
もう一台。もっと重心の低いロボットをつくってみようと思います。
とりあえず来週の月曜日に新しいロボットをつくってみようかな。
とにかく坂が登れないロボットはもうちょっと嫌なので・・・(苦笑)
一先ず今日はこのへんで
(^・ω・)ノ RadiumProduction in RoboCup Junior
このままだと通電センサー×2、タッチセンサー×2が最低でも増えそうな感じです。
一体ドコまでセンサーが増えるんだ・・・すごく残念な方向に進みつつある今日この頃です。
今日の活動ですが、プラズマの配線と動きの確認を行なって、とりあえずジャイロの位置を変更しました。
ロボットの大手術は行なうかどうかはまだ未定です。さてと、どうしようかな・・・。
とりあえず今のところは現状維持の方向でいこうと考えています。コースにもよりますが・・・(苦笑)
一先ず今週中にタッチセンサーと通電センサーを増設しないと・・・と思ったのですが、
よく考えるともうコードがないという残念なことに気が付きました。
今度買ってこないといけませんね。明日は・・・ロボットの重心についてちょっと考えてみようと思います。
それではまた。
そうそう、今回の関東ブロックで初めてプレゼンの審査順位が掲載されました。ここにー。
とてつもなく残念なことになっていて、爆笑してしまいました。高専生自重してください。
(^・ω・)ノ RadiumProduction in RoboCup Junior
一体ドコまでセンサーが増えるんだ・・・すごく残念な方向に進みつつある今日この頃です。
今日の活動ですが、プラズマの配線と動きの確認を行なって、とりあえずジャイロの位置を変更しました。
ロボットの大手術は行なうかどうかはまだ未定です。さてと、どうしようかな・・・。
とりあえず今のところは現状維持の方向でいこうと考えています。コースにもよりますが・・・(苦笑)
一先ず今週中にタッチセンサーと通電センサーを増設しないと・・・と思ったのですが、
よく考えるともうコードがないという残念なことに気が付きました。
今度買ってこないといけませんね。明日は・・・ロボットの重心についてちょっと考えてみようと思います。
それではまた。
そうそう、今回の関東ブロックで初めてプレゼンの審査順位が掲載されました。ここにー。
とてつもなく残念なことになっていて、爆笑してしまいました。高専生自重してください。
(^・ω・)ノ RadiumProduction in RoboCup Junior
帰りに某ファーストフードの店から母に呼び止められて、紙袋をもらいました。
そしてこの一言。「今日ご飯大根しかないんだよね。だからこれで足しにしてくれる?」
・・・。
というわけで今日の晩御飯のおかずは大根+オニオンリング+チキンでした。
今日はブロックの反省を生かし、ロボットの重心を変えたり、ライトセンサーの位置を変えたり・・・ということをする
予定だったのですが、
ロボットの汎用性があまりにも低すぎて、いっちもさっちもいかない・・・><。
全く本体には変更を加えることができませんでした。一体どういう作りになっているんだか・・・。
という訳で、例のあのプラズマのあの子を移植手術を行なって、その結果バンパーが馬鹿でかくなって、
それで今日は終わりました。
うーん。マイクロスイッチをあと4つ増やす予定だったのですが、時間足りなかったなぁ。
とりあえずこの先センサーが20個を超えることが確定した今日この頃でした。
それではまた。
(^・ω・)ノ RadiumProduction in RoboCup Junior
そしてこの一言。「今日ご飯大根しかないんだよね。だからこれで足しにしてくれる?」
・・・。
というわけで今日の晩御飯のおかずは大根+オニオンリング+チキンでした。
今日はブロックの反省を生かし、ロボットの重心を変えたり、ライトセンサーの位置を変えたり・・・ということをする
予定だったのですが、
ロボットの汎用性があまりにも低すぎて、いっちもさっちもいかない・・・><。
全く本体には変更を加えることができませんでした。一体どういう作りになっているんだか・・・。
という訳で、例のあのプラズマのあの子を移植手術を行なって、その結果バンパーが馬鹿でかくなって、
それで今日は終わりました。
うーん。マイクロスイッチをあと4つ増やす予定だったのですが、時間足りなかったなぁ。
とりあえずこの先センサーが20個を超えることが確定した今日この頃でした。
それではまた。
(^・ω・)ノ RadiumProduction in RoboCup Junior
ここにきてプログラムの書き直しという究極の力押しでロボットの覚醒に成功しました。
ようやくまともに動くようになった・・・(笑)
まだたまに坂の下とバンプで吹っ飛びますが・・・まぁそのへんはここから直していくつもりです。
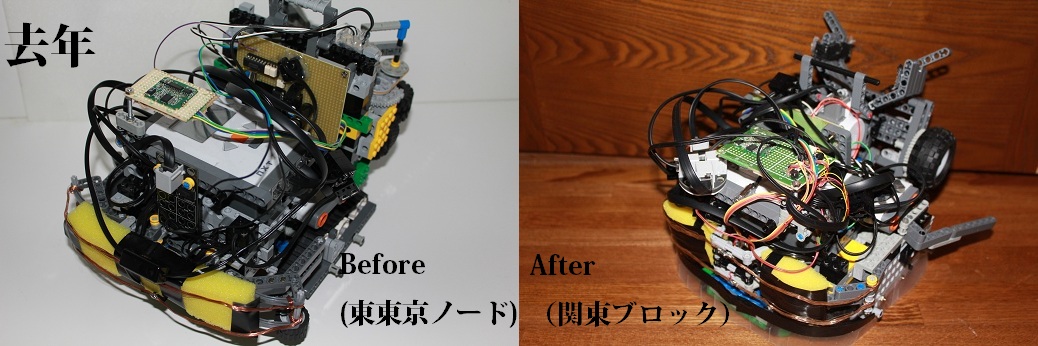
それで結局ノードからLα+はなにをしたのかと、いう話になるわけです。
面倒なので箇条書きにしますと・・・
・予備機がメイン機に近い形になった。
・光センサーの位置等が変わった。
・4輪駆動になった。(ノードの時は駆動は2輪でした)
・全体的に横幅が小さくなり縦長になって結局大きくなった。
・バンパーの構造が別物になった。
・アームの滑り度止めを強化した。
・ロボットに串対策を施した。
・タッチセンサーの約半数がマイクロスイッチになった。
・ジャイロセンサーを搭載し、結局センサーが18個になった。
・センサーのポートの割り当てが全く違うものになった。
・以上のことが原因でプログラムが全く別のものになった。
大きくはこの辺でしょうか。ほとんど総とっかえですね。まぁ去年みたいに本当に総とっかえした訳ではありませんが・・・
まぁ今回の関東ブロックはこんな具合に行こうと考えています。
とりあえずこれから最終調整・・・というより新プログラムの適合可を行おうと思います。
それではまたー。
因みに明日は日吉ですので宜しくお願い致します。
(^・ω・)ノ RadiumProduction in RoboCup Junior
ようやくまともに動くようになった・・・(笑)
まだたまに坂の下とバンプで吹っ飛びますが・・・まぁそのへんはここから直していくつもりです。
それで結局ノードからLα+はなにをしたのかと、いう話になるわけです。
面倒なので箇条書きにしますと・・・
・予備機がメイン機に近い形になった。
・光センサーの位置等が変わった。
・4輪駆動になった。(ノードの時は駆動は2輪でした)
・全体的に横幅が小さくなり縦長になって結局大きくなった。
・バンパーの構造が別物になった。
・アームの滑り度止めを強化した。
・ロボットに串対策を施した。
・タッチセンサーの約半数がマイクロスイッチになった。
・ジャイロセンサーを搭載し、結局センサーが18個になった。
・センサーのポートの割り当てが全く違うものになった。
・以上のことが原因でプログラムが全く別のものになった。
大きくはこの辺でしょうか。ほとんど総とっかえですね。まぁ去年みたいに本当に総とっかえした訳ではありませんが・・・
まぁ今回の関東ブロックはこんな具合に行こうと考えています。
とりあえずこれから最終調整・・・というより新プログラムの適合可を行おうと思います。
それではまたー。
因みに明日は日吉ですので宜しくお願い致します。
(^・ω・)ノ RadiumProduction in RoboCup Junior
副部長復活していますねー。いつの間にか。
残念ながらLα+は完璧に置いていかれました・・・><。
坂が完璧にできなくなりました。どんどん状態が悪化していくLα+です。
前のプログラムに戻してもできないものはできないし・・・
ライントレースも途中での逆走が目立つように。うーん。大会前だねぇ。
ここ2,3年、大会の4日ほど前になると不思議な力が働いて(?)
何も変更をしていないロボットが急に完璧だった課題ができなくなるということが続いています。
去年は前日にNXTぴちゅんしたし・・・NXTに変えてからが特に酷いように思えます。
やっぱり安定性ではRCXに敵うものはいないのでしょうね。
それでもうロボット真面目にやらないとまずいのですが、
なんとここにきてレポート3冊追加・・・しかも明日も一個増えます。
その中ではなんと月曜提出というものまであったり。一体どうしろと・・・(苦笑)
・・・うん。
これから暫く徹夜しよう(笑)
どうやら今週から来週に掛けては本当の地獄が待っているようです。
とりあえず朝までに一個仕上げようと思うのでちょっと書いてきます
それではー。
(^・ω・)ノ RadiumProduction in RoboCup Junior
残念ながらLα+は完璧に置いていかれました・・・><。
坂が完璧にできなくなりました。どんどん状態が悪化していくLα+です。
前のプログラムに戻してもできないものはできないし・・・
ライントレースも途中での逆走が目立つように。うーん。大会前だねぇ。
ここ2,3年、大会の4日ほど前になると不思議な力が働いて(?)
何も変更をしていないロボットが急に完璧だった課題ができなくなるということが続いています。
去年は前日にNXTぴちゅんしたし・・・NXTに変えてからが特に酷いように思えます。
やっぱり安定性ではRCXに敵うものはいないのでしょうね。
それでもうロボット真面目にやらないとまずいのですが、
なんとここにきてレポート3冊追加・・・しかも明日も一個増えます。
その中ではなんと月曜提出というものまであったり。一体どうしろと・・・(苦笑)
・・・うん。
これから暫く徹夜しよう(笑)
どうやら今週から来週に掛けては本当の地獄が待っているようです。
とりあえず朝までに一個仕上げようと思うのでちょっと書いてきます
それではー。
(^・ω・)ノ RadiumProduction in RoboCup Junior
とりあえず今、一番の問題なのは・・・。
バンプができない。ということでしょうか。
いきなり明後日の方向に向かって走りだすことが度々あります。
それと一番問題なのが2階。今回の東東京ノードでは大丈夫でしたが、
僕のロボットは2階に上がると全センサーが一切なにも検出しなくなるという現象が発生することがあります。
高専祭の時が酷かったんですね。全く反応しない・・・。
まぁこれが関東ブロックで発生いたしますと、完璧に詰んだ状態になるわけです。
と、言う訳で、この2点をなんとかして治したいのですが、前者はともかく、
センサーの件は原因不明な上に部室だと一切発生しないんですよね。
なにかしらの外的要因であることは間違いないのですが、それがなんなのかは・・・といった感じです。
さてと、困った。どうしましょうかねぇ・・・
因みに例の電磁気のテストですが、普通に満点でした。周りから殺されそうになりました。
(^・ω・)ノ RadiumProduction in RoboCup Junior
バンプができない。ということでしょうか。
いきなり明後日の方向に向かって走りだすことが度々あります。
それと一番問題なのが2階。今回の東東京ノードでは大丈夫でしたが、
僕のロボットは2階に上がると全センサーが一切なにも検出しなくなるという現象が発生することがあります。
高専祭の時が酷かったんですね。全く反応しない・・・。
まぁこれが関東ブロックで発生いたしますと、完璧に詰んだ状態になるわけです。
と、言う訳で、この2点をなんとかして治したいのですが、前者はともかく、
センサーの件は原因不明な上に部室だと一切発生しないんですよね。
なにかしらの外的要因であることは間違いないのですが、それがなんなのかは・・・といった感じです。
さてと、困った。どうしましょうかねぇ・・・
因みに例の電磁気のテストですが、普通に満点でした。周りから殺されそうになりました。
(^・ω・)ノ RadiumProduction in RoboCup Junior
東東京ノードが終わってから、これで2回目のセンサー部分の変更になりますね。
今回の変更目的はバンプによる干渉の軽減。
今までの機構だと、バンプの状況によってはひっかかるような場面が何度か見られていました。
という訳でその辺りを今日は変更しました。
それでもって今日もセンサー部分を変更したのですが、
普通センサーの取り付けを変更したら、回転半径も変わってくるので、
勿論ライントレースのプログラムを変えないといけないはずなのですが・・・
何故か変えなくてもちゃんと動くという事実が判明。この前ロボットの回転軸を変えたときも同じ現象が起きたなぁ・・・
一体何でなんでしょうねぇ・・・。こればっかりはわからない・・・。
因みにジャイロですが、今日動かしたところ、やっぱり2,3回値がおかしくなりました。
原因は未だに不明です。やっぱり電力ピチューンかなぁ・・・。
今日はそんな感じでした。
因みに今日解析のテストが返ってきたのですが、なんか評定が11.3。
このままだと評価が11になるんですけど・・・(苦笑)あれ?評価って1から10の10段階評価のような・・・
(^・ω・)ノ RadiumProduction in RoboCup Junior
今回の変更目的はバンプによる干渉の軽減。
今までの機構だと、バンプの状況によってはひっかかるような場面が何度か見られていました。
という訳でその辺りを今日は変更しました。
それでもって今日もセンサー部分を変更したのですが、
普通センサーの取り付けを変更したら、回転半径も変わってくるので、
勿論ライントレースのプログラムを変えないといけないはずなのですが・・・
何故か変えなくてもちゃんと動くという事実が判明。この前ロボットの回転軸を変えたときも同じ現象が起きたなぁ・・・
一体何でなんでしょうねぇ・・・。こればっかりはわからない・・・。
因みにジャイロですが、今日動かしたところ、やっぱり2,3回値がおかしくなりました。
原因は未だに不明です。やっぱり電力ピチューンかなぁ・・・。
今日はそんな感じでした。
因みに今日解析のテストが返ってきたのですが、なんか評定が11.3。
このままだと評価が11になるんですけど・・・(苦笑)あれ?評価って1から10の10段階評価のような・・・
(^・ω・)ノ RadiumProduction in RoboCup Junior
となりましたが、今日も部室は人が少なくて快適です。
実質レスキューは活動しているの2チームしかいないからなぁ・・・。部室が広く感じます。
それで、多方面から心配されているロボットの状態ですが、割りとよいう方向に持ってきていると思います。
ジャイロセンサー以外は(笑)
ジャイロセンサーは動かす度に回転量が変わって全然まともに使えていない状況です。
そう、例えるなら磁場条件が悪いところでコンパスを動かしているような・・・そんな感じです。
プログラムに異常はなし。ジャイロ自体も動作は確認済み。だから余計に厄介なんです。
ものスゴーっく電力不足的な根幹を成している付近に異常があるっぽい雰囲気があるので
すごく気が重いのですが、明日その辺りを詳しく調べてみようと思います。
今日はそんな感じ。あと部室のコースが微妙に変わりました。
それでは
(^・ω・)ノ RadiumProduction in RoboCup Junior
実質レスキューは活動しているの2チームしかいないからなぁ・・・。部室が広く感じます。
それで、多方面から心配されているロボットの状態ですが、割りとよいう方向に持ってきていると思います。
ジャイロセンサー以外は(笑)
ジャイロセンサーは動かす度に回転量が変わって全然まともに使えていない状況です。
そう、例えるなら磁場条件が悪いところでコンパスを動かしているような・・・そんな感じです。
プログラムに異常はなし。ジャイロ自体も動作は確認済み。だから余計に厄介なんです。
ものスゴーっく電力不足的な根幹を成している付近に異常があるっぽい雰囲気があるので
すごく気が重いのですが、明日その辺りを詳しく調べてみようと思います。
今日はそんな感じ。あと部室のコースが微妙に変わりました。
それでは
(^・ω・)ノ RadiumProduction in RoboCup Junior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
(01/01)
(05/07)
(01/11)
(07/30)
(06/25)
プロフィール
HN:
Luz
性別:
男性
アーカイブ