RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
このサイトを見てきている皆さんなら、一度は LEGOブロックに触ったことがあると思います。
そして実際に遊んだり、LEGOでロボットを作っている人なら一度は経験したことがあるであろう状況がこれ。
「あ。部品がない・・・><。」
これによって、せっかく作りたかったものも作れなくなってしまうこと。ありますよね?
LEGOブロックは只でさえとても高いですから、部品を買って作るとしても大変です。
お金に余裕のある人ならともかく、お金がないとちょっと難しいですよね。
でも、お金がなくてもタダで作りたいものを、好きにLEGOブロックで作ることができる方法があるんです。
どういう方法かというと、パソコン上でブロックを組み立ててしまう方法です。
パソコンなら、部品のデータさえあれば個数は無限に使用できますから、
リアルより自由な作品の作成ができるという訳です。
こういうパソコン上で部品を組み立てて、様々な設計を行うことをCAD(Computer Aided Design)といいます。
直訳で「コンピューター支援設計」といった感じになりますからそのままですね。
それでCADをすることができるソフトをそのまま、CADソフトと呼びます。
最近ではソフトそのものを「CAD」と呼ぶことも多いようです。
昔は製図用紙の様に、2次元での製図のみのCADソフトが一般的だったのですが、
最近では3D。つまり3次元で実際に部品をPC上で作り、作成して、実際に動作させる。
といったところまでできるCADソフトが一般的になっています。
凄いのだと強度試験とかもバーチャルでできるようですね。すごいです。
このPCにもソリッドワークスというCADソフトが入っていたりしますが、今回はその話は致しません。
今日紹介するのはLEGOの為に作られた、LEGO専用のLEGOCADです。
今回はその中でも、僕が昔から使っているMLCADというCADソフトについて紹介します。
上のロゴや、Radium機の試作に使用したCADソフトです。
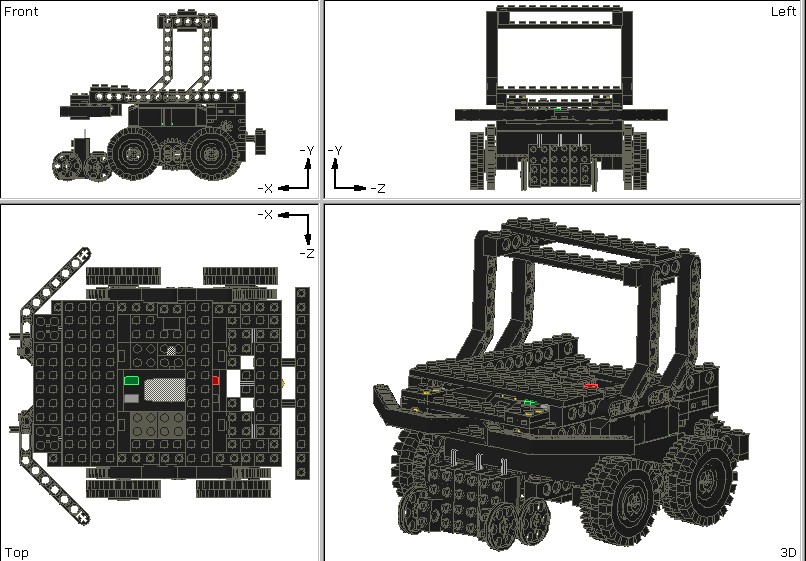
フリーソフトで、自由にダウンロードができ、本格的に設計をすることができます。
基本的に本家サイトには日本語版はありませんが、
日本語のランゲージパックが別途このサイトからダウンロードできるようになっています。
まぁめんどくさいから僕は英語版のまま使用していますが。
また、通常版にはNXT関連の部品がありませんが、このサイトでNXTのライブラリが公開されているので、
ダウンロードしてパソコンのC\LDrawに解凍し、MLCADを起動してfile→ScanPartsをクリックすることで
NXT関連のパーツも使用することができるようになります。
それ以外でも必要なパーツがあれば、このサイトにライブラリがあるので
検索してdatファイルをダウンロードし、C\LDraw\Partsにコピーし、MLCADを起動し、上と同じことをすれば
ダウンロードしたライブラリデータが使えるようになります。
もちろん、CAD、つまり設計用なので自分でPC上で作りたいものを作るだけでなく、
実際に作成するロボット等の設計にも使えます。(むしろそっちがメインの使い方なんだけど・・・)
まぁLEGOの場合、慣れてくると、大まかな形だけMLCADを使って設計するけど、
細かいところは実際に作って決めていく・・・みたいな感じになってしまいます。だってその方が速いんだもん。
そんなMLCADの紹介でした。暇だったら今度使い方も合わせて説明したりするかもしれません。
因みに今日はずっとMLCADで遊んでました。今日はこれにて。
(^・ω・)ノRadiumProduction in RoboCupJunior
そして実際に遊んだり、LEGOでロボットを作っている人なら一度は経験したことがあるであろう状況がこれ。
「あ。部品がない・・・><。」
これによって、せっかく作りたかったものも作れなくなってしまうこと。ありますよね?
LEGOブロックは只でさえとても高いですから、部品を買って作るとしても大変です。
お金に余裕のある人ならともかく、お金がないとちょっと難しいですよね。
でも、お金がなくてもタダで作りたいものを、好きにLEGOブロックで作ることができる方法があるんです。
どういう方法かというと、パソコン上でブロックを組み立ててしまう方法です。
パソコンなら、部品のデータさえあれば個数は無限に使用できますから、
リアルより自由な作品の作成ができるという訳です。
こういうパソコン上で部品を組み立てて、様々な設計を行うことをCAD(Computer Aided Design)といいます。
直訳で「コンピューター支援設計」といった感じになりますからそのままですね。
それでCADをすることができるソフトをそのまま、CADソフトと呼びます。
最近ではソフトそのものを「CAD」と呼ぶことも多いようです。
昔は製図用紙の様に、2次元での製図のみのCADソフトが一般的だったのですが、
最近では3D。つまり3次元で実際に部品をPC上で作り、作成して、実際に動作させる。
といったところまでできるCADソフトが一般的になっています。
凄いのだと強度試験とかもバーチャルでできるようですね。すごいです。
このPCにもソリッドワークスというCADソフトが入っていたりしますが、今回はその話は致しません。
今日紹介するのはLEGOの為に作られた、LEGO専用のLEGOCADです。
今回はその中でも、僕が昔から使っているMLCADというCADソフトについて紹介します。
上のロゴや、Radium機の試作に使用したCADソフトです。
フリーソフトで、自由にダウンロードができ、本格的に設計をすることができます。
基本的に本家サイトには日本語版はありませんが、
日本語のランゲージパックが別途このサイトからダウンロードできるようになっています。
まぁめんどくさいから僕は英語版のまま使用していますが。
また、通常版にはNXT関連の部品がありませんが、このサイトでNXTのライブラリが公開されているので、
ダウンロードしてパソコンのC\LDrawに解凍し、MLCADを起動してfile→ScanPartsをクリックすることで
NXT関連のパーツも使用することができるようになります。
それ以外でも必要なパーツがあれば、このサイトにライブラリがあるので
検索してdatファイルをダウンロードし、C\LDraw\Partsにコピーし、MLCADを起動し、上と同じことをすれば
ダウンロードしたライブラリデータが使えるようになります。
もちろん、CAD、つまり設計用なので自分でPC上で作りたいものを作るだけでなく、
実際に作成するロボット等の設計にも使えます。(むしろそっちがメインの使い方なんだけど・・・)
まぁLEGOの場合、慣れてくると、大まかな形だけMLCADを使って設計するけど、
細かいところは実際に作って決めていく・・・みたいな感じになってしまいます。だってその方が速いんだもん。
そんなMLCADの紹介でした。暇だったら今度使い方も合わせて説明したりするかもしれません。
因みに今日はずっとMLCADで遊んでました。今日はこれにて。
(^・ω・)ノRadiumProduction in RoboCupJunior
ライントレースを行うロボットのシミュレーションゲームです。紹介ページ
ランダムなコースを
3個のラインセンサーの値からロボットの動作を決定します。
基本的には十字キーで選択、エンターキーで決定となります。
RETURNを選択すると前の画面に戻ります。
Game Start
Make Programで記述したプログラムを実行します。
最初に実行するプログラムを選択して実行します。
ゴールした際は、
Make Program
プログラムを作成します。
プログラムは各センサーの状況ごとに9通りの動作指定が行えます
また、合計で5個のプログラムの保存が行えます。
Sensor設定
SENSOR1:左のセンサー
SENSOR2:真ん中のセンサー
SENSOR3:右のセンサー
ON:センサーがラインを検知している
OFF:センサーがラインを検知していない
Ex)SENSOR1 ON:左のセンサーだけがラインを検知している
SENSOR1&2 ON:左のセンサーと真ん中のセンサーがラインを検知している
Move設定
DON'T COM:何もしない(前の動作を継続)
FORWADR:前進
LEFT TURN:左回転
RIGHT TURN:右回転
LEFT CURVE:左旋回
RIGHT CURVE:右旋回
Time設定
Moveで設定した動作を行う(繰り返し実行する)回数を設定する。(0~8)
動作中のセンサーの感度に相当するので、大きければ大きいほど動きが大まかになり、小さいほど小刻みになる。
Control Mode
コースを自由に走行できます。
ロボットの移動は十字キーで行います。
Config
各種設定が行えます。プログラムの削除もここで行います。
Escape
LineSimulatorを終了します。
※ Avast!等、一部のウイルス・セキュリティソフトで
このソフトがウイルスと誤検知されたという報告が寄せられています。
もし、ソフトのインストールが正常に行えない場合は対応させて頂きますので
toaru_sangi_no_rcj☆yahoo.co.jp(☆を@に変更)までご連絡お願い致します。
バッチファイル的なもの
ダウンロード後、C\ProgramFiles\LineSimulator内のLineSimulator.exeに上書きしてください。
Version 1.0.1 H24/10/29
ランダムなコースを
3個のラインセンサーの値からロボットの動作を決定します。
基本的には十字キーで選択、エンターキーで決定となります。
RETURNを選択すると前の画面に戻ります。
Game Start
Make Programで記述したプログラムを実行します。
最初に実行するプログラムを選択して実行します。
ゴールした際は、
Make Program
プログラムを作成します。
プログラムは各センサーの状況ごとに9通りの動作指定が行えます
また、合計で5個のプログラムの保存が行えます。
Sensor設定
SENSOR1:左のセンサー
SENSOR2:真ん中のセンサー
SENSOR3:右のセンサー
ON:センサーがラインを検知している
OFF:センサーがラインを検知していない
Ex)SENSOR1 ON:左のセンサーだけがラインを検知している
SENSOR1&2 ON:左のセンサーと真ん中のセンサーがラインを検知している
Move設定
DON'T COM:何もしない(前の動作を継続)
FORWADR:前進
LEFT TURN:左回転
RIGHT TURN:右回転
LEFT CURVE:左旋回
RIGHT CURVE:右旋回
Time設定
Moveで設定した動作を行う(繰り返し実行する)回数を設定する。(0~8)
動作中のセンサーの感度に相当するので、大きければ大きいほど動きが大まかになり、小さいほど小刻みになる。
Control Mode
コースを自由に走行できます。
ロボットの移動は十字キーで行います。
Config
各種設定が行えます。プログラムの削除もここで行います。
Escape
LineSimulatorを終了します。
※ Avast!等、一部のウイルス・セキュリティソフトで
このソフトがウイルスと誤検知されたという報告が寄せられています。
もし、ソフトのインストールが正常に行えない場合は対応させて頂きますので
toaru_sangi_no_rcj☆yahoo.co.jp(☆を@に変更)までご連絡お願い致します。
バッチファイル的なもの
ダウンロード後、C\ProgramFiles\LineSimulator内のLineSimulator.exeに上書きしてください。
Version 1.0.1 H24/10/29
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ