RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
[1]
[2]
関東ブロックまであとちょっとですね。
そろそろスパートかけなきゃ。今までロボコンの会議とかもあったので
ノード以来平日はまともに活動してないんですよね ・・・
その関東ブロックのスケジュールが発表されました。
受け付けは8時、試合開始は13時ですね。ノードより30分早いです><。
まぁブロック大会ですから、仕方ないのでしょうけど・・・
とりあえず今日はそんな話とは全く関係のない」。センサーの紹介の話です。
今日紹介するセンサーは此方。

圧電ジャイロモジュール。所謂ジャイロセンサーです。
カメラの手振れ補正とか、コレに搭載されていますね。
どういうものかというと、基本的に「角速度」を検出するものです。
角速度って何?という話は恐らく中学の物理で習うでしょう。きっと。
単位時間当たりの回転角度を示す量というのが定義ですが、その辺を詳しくここで説明していくと
僕のロボットで遊ぶ時間が消えるので割愛させていただきます(笑)
まぁ簡単なことを言うと「回転速度」みたいなものです。ちょっと違うような気もするけど。
まぁそんな感じのものです。
それで、その「角速度」を検知するセンサーが上の基盤には2つ搭載されています。
つまり2軸のジャイロセンサーという訳です。
因みに出力はアナログなので簡単ですよ。一度試せばわか・・・らないかも(汗)
結構用途限定されますからね。使いようによっては方位センサーや加速度センサーの代わりになってくれますけど・・・
まぁ興味のある方は一度使ってみるといいかも知れません。
という訳で今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
そろそろスパートかけなきゃ。今までロボコンの会議とかもあったので
ノード以来平日はまともに活動してないんですよね ・・・
その関東ブロックのスケジュールが発表されました。
受け付けは8時、試合開始は13時ですね。ノードより30分早いです><。
まぁブロック大会ですから、仕方ないのでしょうけど・・・
とりあえず今日はそんな話とは全く関係のない」。センサーの紹介の話です。
今日紹介するセンサーは此方。
圧電ジャイロモジュール。所謂ジャイロセンサーです。
カメラの手振れ補正とか、コレに搭載されていますね。
どういうものかというと、基本的に「角速度」を検出するものです。
角速度って何?という話は恐らく中学の物理で習うでしょう。きっと。
単位時間当たりの回転角度を示す量というのが定義ですが、その辺を詳しくここで説明していくと
僕のロボットで遊ぶ時間が消えるので割愛させていただきます(笑)
まぁ簡単なことを言うと「回転速度」みたいなものです。ちょっと違うような気もするけど。
まぁそんな感じのものです。
それで、その「角速度」を検知するセンサーが上の基盤には2つ搭載されています。
つまり2軸のジャイロセンサーという訳です。
因みに出力はアナログなので簡単ですよ。一度試せばわか・・・らないかも(汗)
結構用途限定されますからね。使いようによっては方位センサーや加速度センサーの代わりになってくれますけど・・・
まぁ興味のある方は一度使ってみるといいかも知れません。
という訳で今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
今回は市販センサーの紹介です。
今日紹介するのは此方の

圧力センサー、FSR400 です。
PTF(Polymer Thick Film、日本語訳で高分子厚膜フィルム)というデバイスを利用したセンサーで、
受けた圧力によってセンサー内部の電気抵抗量が変化する仕組みになっています。
簡単に言えば、圧力によって抵抗値が変化する抵抗。といったところでしょうか。
抵抗値が変化すれば、センサーに流れる電流量も変化しますから、当然センサーの端子間の電圧も変化し、
センサーの出力値もアナログで変化します。これはオームの法則から言えることですね。
まぁ要するに通常の光センサーなどと同じアナログセンサーに分類されるものになります。
感圧範囲は0.1kg~10kgで、
抵抗量は何も触れていない状態で1MΩ程となり、圧力が高くなるほど抵抗量が少なくなっていきます。
ちょっと前にロボカップジュニアでの用途はないかなぁと思って購入したのですが、どうにも思いつきませんね。
うーん。何かいいアイデアはないかなぁ。正確には用途は幾つか思いついたのですが、
よくよく考えると「他のセンサーを使った方が楽だ。」という結論に至るものばかりなのです(笑)
とりあえず、これだ!っていう用途を見つけないと・・・無駄使いになってしまう・・・(汗)
因みに皆さんのよく目にすることろではPS2やPS3のコントローラーのボタン等に使われていたりしますよ。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日紹介するのは此方の
圧力センサー、FSR400 です。
PTF(Polymer Thick Film、日本語訳で高分子厚膜フィルム)というデバイスを利用したセンサーで、
受けた圧力によってセンサー内部の電気抵抗量が変化する仕組みになっています。
簡単に言えば、圧力によって抵抗値が変化する抵抗。といったところでしょうか。
抵抗値が変化すれば、センサーに流れる電流量も変化しますから、当然センサーの端子間の電圧も変化し、
センサーの出力値もアナログで変化します。これはオームの法則から言えることですね。
まぁ要するに通常の光センサーなどと同じアナログセンサーに分類されるものになります。
感圧範囲は0.1kg~10kgで、
抵抗量は何も触れていない状態で1MΩ程となり、圧力が高くなるほど抵抗量が少なくなっていきます。
ちょっと前にロボカップジュニアでの用途はないかなぁと思って購入したのですが、どうにも思いつきませんね。
うーん。何かいいアイデアはないかなぁ。正確には用途は幾つか思いついたのですが、
よくよく考えると「他のセンサーを使った方が楽だ。」という結論に至るものばかりなのです(笑)
とりあえず、これだ!っていう用途を見つけないと・・・無駄使いになってしまう・・・(汗)
因みに皆さんのよく目にすることろではPS2やPS3のコントローラーのボタン等に使われていたりしますよ。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日は方位センサーの紹介です。
でもレゴの方位センサーではありませんよ。まったく違う方位センサーです。

サッカーではもうお馴染みですよね。Radium機にも搭載されています。
この方位センサーですが、どのようになっているかといいますと、
電源の2本のほかに信号線を3本利用していて
8方位を検出することができます。
3本の信号でデジタル信号となっているので
1本目 2本目 3本目
OFF OFF OFF
ON OFF OFF
OFF ON OFF
ON ON OFF
OFF OFF ON
ON OFF ON
OFF ON ON
ON ON ON
という8パターンの信号の出力ができ、この8パターンの信号は方位によって変わるので
この3本の信号を全てONかOFFか調べることで
センサーが8つの方向の中で、どの方向を向いているかを測定することができます。
だから簡単にすると、処理的にはタッチセンサーが3つあってどことどこがONだったらこの方位だね。
って感じの制御になります。
動作する電圧は5VなのでLEGOでも普通に使えますが、そのまま使うと3ポート使用しまうことになるので
そこら辺はよく考えて使った方がいいと思います。
NXTで方位センサーが出てしまったからLEGOで今更使う意味はないかな?
でも半導体素子のみのセンサーなので、他の方位センサーよりは磁場の影響が少なくなると思います。
自作で方位センサーを使ってみようと思っている方は是非使ってみてください。
デジタル制御は簡単ですから初心者にはオススメですよ♪
只このセンサーちょっとだけはんだつけが難しいのと、
無温無臭でお亡くなりになることが、たまにあるので気を付けてください。
(^・ω・)ノRadiumProduction in RoboCupJunior
でもレゴの方位センサーではありませんよ。まったく違う方位センサーです。
サッカーではもうお馴染みですよね。Radium機にも搭載されています。
この方位センサーですが、どのようになっているかといいますと、
電源の2本のほかに信号線を3本利用していて
8方位を検出することができます。
3本の信号でデジタル信号となっているので
1本目 2本目 3本目
OFF OFF OFF
ON OFF OFF
OFF ON OFF
ON ON OFF
OFF OFF ON
ON OFF ON
OFF ON ON
ON ON ON
という8パターンの信号の出力ができ、この8パターンの信号は方位によって変わるので
この3本の信号を全てONかOFFか調べることで
センサーが8つの方向の中で、どの方向を向いているかを測定することができます。
だから簡単にすると、処理的にはタッチセンサーが3つあってどことどこがONだったらこの方位だね。
って感じの制御になります。
動作する電圧は5VなのでLEGOでも普通に使えますが、そのまま使うと3ポート使用しまうことになるので
そこら辺はよく考えて使った方がいいと思います。
NXTで方位センサーが出てしまったからLEGOで今更使う意味はないかな?
でも半導体素子のみのセンサーなので、他の方位センサーよりは磁場の影響が少なくなると思います。
自作で方位センサーを使ってみようと思っている方は是非使ってみてください。
デジタル制御は簡単ですから初心者にはオススメですよ♪
只このセンサーちょっとだけはんだつけが難しいのと、
無温無臭でお亡くなりになることが、たまにあるので気を付けてください。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日は赤外線測距センサーについて書こうと思います。
赤外線測距センサー、以前に測距センサーとして超音波センサーを紹介したかと思うのですが、
あれは音波を出して、それが反射して戻ってくるまでの時間を測るものでした。
この赤外線測距センサーはそうではなくて、音波の代わりに赤外線を出して、
その赤外線が戻ってくる反射量、反射角を計測するセンサーです。
よくEOPDセンサーとかPSDセンサー等と呼ばれるものですね。
因みにEOPDとはElectro Optical Proximity Detectorの略語で、
日本語にすると「電気、光学的近接センサー」という風な感じになります。
PSDはPosition Sensitive Deviceの略で日本語にすると「位置検出素子」となります。
種類によって検知できる距離の範囲が異なりますが、僕がよく使用しているのは
10~80㎝程、つまりNXTの超音波センサーを同等の検出範囲を持つ
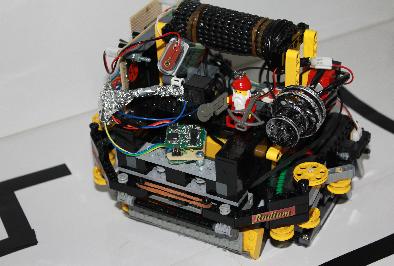
このセンサーです。

型番はGP2Y0A21YK というもので秋月電子通商にて400円ほどで売ってます。シャープ製ですね。
これは単純にアナログの出力となっていて電源の5V、GND、信号の出力の3本線となっています。
以前に紹介したコレには2個ほど搭載されています。
コレ↑
ところで、このセンサーですが、測定対象から最低でも10㎝以上離れないと値が正しく測定できません。
大体フィールドの通路の幅が30㎝で設計されているレスキューのフィールドでは
このセンサーを左右につけてしまうと、通路ではどちらのセンサーも正しい値が返ってきません。
特に坂の前進補正なんかに使いたい場合はロボットの端につけては使いようがありません。
なのに、なんでこのロボットは、こんな一番端にセンサーを付けてしまったのでしょう・・・
謎は深まるばかりです。
結局片方しか使わなかったような・・・まぁいいか。
とりあえず今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
赤外線測距センサー、以前に測距センサーとして超音波センサーを紹介したかと思うのですが、
あれは音波を出して、それが反射して戻ってくるまでの時間を測るものでした。
この赤外線測距センサーはそうではなくて、音波の代わりに赤外線を出して、
その赤外線が戻ってくる反射量、反射角を計測するセンサーです。
よくEOPDセンサーとかPSDセンサー等と呼ばれるものですね。
因みにEOPDとはElectro Optical Proximity Detectorの略語で、
日本語にすると「電気、光学的近接センサー」という風な感じになります。
PSDはPosition Sensitive Deviceの略で日本語にすると「位置検出素子」となります。
種類によって検知できる距離の範囲が異なりますが、僕がよく使用しているのは
10~80㎝程、つまりNXTの超音波センサーを同等の検出範囲を持つ
このセンサーです。
型番はGP2Y0A21YK というもので秋月電子通商にて400円ほどで売ってます。シャープ製ですね。
これは単純にアナログの出力となっていて電源の5V、GND、信号の出力の3本線となっています。
以前に紹介したコレには2個ほど搭載されています。
コレ↑
ところで、このセンサーですが、測定対象から最低でも10㎝以上離れないと値が正しく測定できません。
大体フィールドの通路の幅が30㎝で設計されているレスキューのフィールドでは
このセンサーを左右につけてしまうと、通路ではどちらのセンサーも正しい値が返ってきません。
特に坂の前進補正なんかに使いたい場合はロボットの端につけては使いようがありません。
なのに、なんでこのロボットは、こんな一番端にセンサーを付けてしまったのでしょう・・・
謎は深まるばかりです。
結局片方しか使わなかったような・・・まぁいいか。
とりあえず今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
今日の記事は汎用の加速度センサーについてです。
本当なら今日はプレゼンの資料や現代社会論のレポートとかやらないとそろそろやばいんですが
昨日の深夜にサッカーアジアカップ見て徹夜して朝になってから寝たせいか、
全くやる気が起こらないので先に更新しちゃいます。
加速度センサーにも色々ありますが
とりあえず、入手しやすい3軸加速度センサーをふたつ、今日は紹介したいと思います。
まずはこちら

これは秋月電子通商で販売されている3軸加速度センサーモジュールです。
型番はKXM52-1050だったかな。
これは3方向の加速度をそれぞれ、アナログで出力するというものです。
-2Gから+2Gまで測定ができ、信号の設定で-1Gから+3Gに変更もできるようです。
お次はこちら。

これも秋月電子通商で販売されています。 KXP84-2050という型番の3軸加速度センサーです。
これは上のものと何が違うかというと、出力形式が違います。
上のものは出力はアナログだけでしたが、
こちらのはアナログのほかに、SPIとI2Cという通信規格を採用しています。
まぁボーレートが違うのでNXTとのI2C通信はできませんが。
只、I2Cが使えるということもあり、マイコンを使う際には非常に便利なセンサーとなっています。
しかし、出力範囲は-2Gから+2Gまでの固定だったかと思います。あと日本語の説明書が一切ないです。
ちなみに値段はどちらとも1000円です。
そうそう。最近気がついたのですが、加速度センサーというものは自分でわかっていても、
結構速度センサーと間違えられることが多いみたいです。
まぁ一瞬の思い込み?みたいなやつでしょうか。
加速度センサーはあくまでも加速度、速度の違いを検地するものなので
静止時と等速移動時の値は同じですよね。
それと大きな特徴として、値が大きいほどその値が出力される時間が少なくなり、
値が小さいとその値が出力される時間が長くなります。
これは加速度が大きいほうが速度が安定するのにかかる時間が少ないからですね。
まぁ上海でリニアとかに乗ってたら、結構長い時間値振り切れてそうですけど。
一般的にそーゆー特徴があるので出力値を検知する側としてはちょっと厄介ですね。
特にレスキューロボットの場合、急停止、急発進が多くあるのでかなり難しい気もします。
やっぱりいいセンサーを使うとなるとこちら側もそれなりの力がいるよー。ってことなのでしょうね。
まぁうちののんびり屋さんにのせようとしたら簡単なんでしょうけど(笑)
それではまた
(^・ω・)ノRadiumProduction in RoboCupJunior
本当なら今日はプレゼンの資料や現代社会論のレポートとかやらないとそろそろやばいんですが
昨日の深夜にサッカーアジアカップ見て徹夜して朝になってから寝たせいか、
全くやる気が起こらないので先に更新しちゃいます。
加速度センサーにも色々ありますが
とりあえず、入手しやすい3軸加速度センサーをふたつ、今日は紹介したいと思います。
まずはこちら
これは秋月電子通商で販売されている3軸加速度センサーモジュールです。
型番はKXM52-1050だったかな。
これは3方向の加速度をそれぞれ、アナログで出力するというものです。
-2Gから+2Gまで測定ができ、信号の設定で-1Gから+3Gに変更もできるようです。
お次はこちら。
これも秋月電子通商で販売されています。 KXP84-2050という型番の3軸加速度センサーです。
これは上のものと何が違うかというと、出力形式が違います。
上のものは出力はアナログだけでしたが、
こちらのはアナログのほかに、SPIとI2Cという通信規格を採用しています。
まぁボーレートが違うのでNXTとのI2C通信はできませんが。
只、I2Cが使えるということもあり、マイコンを使う際には非常に便利なセンサーとなっています。
しかし、出力範囲は-2Gから+2Gまでの固定だったかと思います。あと日本語の説明書が一切ないです。
ちなみに値段はどちらとも1000円です。
そうそう。最近気がついたのですが、加速度センサーというものは自分でわかっていても、
結構速度センサーと間違えられることが多いみたいです。
まぁ一瞬の思い込み?みたいなやつでしょうか。
加速度センサーはあくまでも加速度、速度の違いを検地するものなので
静止時と等速移動時の値は同じですよね。
それと大きな特徴として、値が大きいほどその値が出力される時間が少なくなり、
値が小さいとその値が出力される時間が長くなります。
これは加速度が大きいほうが速度が安定するのにかかる時間が少ないからですね。
まぁ上海でリニアとかに乗ってたら、結構長い時間値振り切れてそうですけど。
一般的にそーゆー特徴があるので出力値を検知する側としてはちょっと厄介ですね。
特にレスキューロボットの場合、急停止、急発進が多くあるのでかなり難しい気もします。
やっぱりいいセンサーを使うとなるとこちら側もそれなりの力がいるよー。ってことなのでしょうね。
まぁうちののんびり屋さんにのせようとしたら簡単なんでしょうけど(笑)
それではまた
(^・ω・)ノRadiumProduction in RoboCupJunior
学校きてからも、うちに帰ってからも、いっつも寝てる気がします。
昨日(一昨日?)かな?今年はいってから5回目のロボットの作成を行いました。
結果としてとてものんびりしたロボットができましたね。
まぁ東京関東で速度勝負になる!ってことはないような気がするのでこれでいこうかな。。。
JAPAN?いけたときに考えればいいのさ♪って今はそんな感じですね。
そんな今日はセンサーの話。
以前。レスキュー競技に有効なセンサーのハナシなどといっておいて、
長々と書いて結局ライトセンサーについてしか話さないという大惨事をやらかしたかと思うんですが、
その続きでも・・・と。
ライントレース。センサーの個数のハナシはまた今度するとして、
ひとまずライトセンサーが一般的なんだなぁと云うことは理解していただけたと思います。
でもレスキューにはライントレース以外にも様々な要素があります。
ここで・・・ちょっと2010年度のレスキュー競技のルールを確認してみましょう。
ここではその特別な要素については1.Arenaで書かれており、
基本的には3.5.Scoringによって課題として点数化されています。
そのArena項目によると・・・
まず、フィールドについての説明があって、次にフロアの説明、そんでラインについて書かれていますね。
まずここまでで、1.1に
Modules on different levels are connected by a sloping hallway or ramp. A ramp will not exceed an incline of 25 degrees from the horizontal, and must have walls at least 10 cm high
とあります。
まぁ要訳すると、
フィールドには坂があるよ。その坂は傾斜角25度以内で高さ10cmの壁がつくよ。といってますね。
あと1.6では「坂にはラインが無いかもしれない」と書かれていますね。
つまり坂からはライントレース以外の方法で先に進め。ということですね。
ってことは、坂以降ではライントレースプログラムは機能しない、
変わりに何か別のプログラムを走らせなければいけない。ということになりますね。
そうなると、プログラムの切り替え方法をどうするか。そこが問題になるわけです。
「こんだけ走ったからそろそろ坂だろ」なんてタイマーでテキトーに坂プログラムに入るわけにもいかないので
「なにか」で坂を検知してプログラムを切り替えることが必要ですね。
そこで、その「なにか」、つまり坂を検知するセンサーが必要になってくるわけです。
んじゃどんなセンサーなら坂を検知できるのか。と云う話が次に待っています。
今、巷で流行っている坂センサーと言うと・・・
・タッチセンサー
・チルトセンサー
・水銀スイッチ
・加速度センサー
このあたりでしょうか。
まずタッチセンサー。これは2通りのパターンがあります。
まずはロボットの前または後ろに床と垂直にスイッチ部を付ける方法。
これで前の場合はロボットが坂の前に来たとき、
後ろの場合は坂に入ってロボットの向きが傾いた際にのみセンサーが反応します。
後者のほうは後ろタッチと呼ばれていてLEGOレスキューⅠとかいうチームが最初に採用した技術です。
当時のレスキュー競技では坂からラインがないとかいうことはなかったので、
坂の検知は必要なかったのですが、坂を上る際に通常のライントレースの方法だとずり落ちるらしく、
その対策として使用したようです。
その対策が功を奏し、2006年度の東京ノードでは優勝していましたね。
でもその元チームメンバーがいうには、「今の競技では使えない」そうです。
坂の間ずっとセンサーが反応しているわけではないので「坂が終わったこと」が検知できないんだそうです。
それで最近のセンサーは全て坂にいる間、反応し続けているものになっているようです。
よくタッチセンサーで使われる手法は前後に動く重りなどをタッチセンサーの前に乗せて
坂で傾斜に入った際に重りが後ろにいくことでタッチセンサーが押される手法でしょうか。
まぁ今日はテストも近いのでこの辺で終わりにしましょう。
チルトセンサー以降はまた今度で・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
昨日(一昨日?)かな?今年はいってから5回目のロボットの作成を行いました。
結果としてとてものんびりしたロボットができましたね。
まぁ東京関東で速度勝負になる!ってことはないような気がするのでこれでいこうかな。。。
JAPAN?いけたときに考えればいいのさ♪って今はそんな感じですね。
そんな今日はセンサーの話。
以前。レスキュー競技に有効なセンサーのハナシなどといっておいて、
長々と書いて結局ライトセンサーについてしか話さないという大惨事をやらかしたかと思うんですが、
その続きでも・・・と。
ライントレース。センサーの個数のハナシはまた今度するとして、
ひとまずライトセンサーが一般的なんだなぁと云うことは理解していただけたと思います。
でもレスキューにはライントレース以外にも様々な要素があります。
ここで・・・ちょっと2010年度のレスキュー競技のルールを確認してみましょう。
ここではその特別な要素については1.Arenaで書かれており、
基本的には3.5.Scoringによって課題として点数化されています。
そのArena項目によると・・・
まず、フィールドについての説明があって、次にフロアの説明、そんでラインについて書かれていますね。
まずここまでで、1.1に
Modules on different levels are connected by a sloping hallway or ramp. A ramp will not exceed an incline of 25 degrees from the horizontal, and must have walls at least 10 cm high
とあります。
まぁ要訳すると、
フィールドには坂があるよ。その坂は傾斜角25度以内で高さ10cmの壁がつくよ。といってますね。
あと1.6では「坂にはラインが無いかもしれない」と書かれていますね。
つまり坂からはライントレース以外の方法で先に進め。ということですね。
ってことは、坂以降ではライントレースプログラムは機能しない、
変わりに何か別のプログラムを走らせなければいけない。ということになりますね。
そうなると、プログラムの切り替え方法をどうするか。そこが問題になるわけです。
「こんだけ走ったからそろそろ坂だろ」なんてタイマーでテキトーに坂プログラムに入るわけにもいかないので
「なにか」で坂を検知してプログラムを切り替えることが必要ですね。
そこで、その「なにか」、つまり坂を検知するセンサーが必要になってくるわけです。
んじゃどんなセンサーなら坂を検知できるのか。と云う話が次に待っています。
今、巷で流行っている坂センサーと言うと・・・
・タッチセンサー
・チルトセンサー
・水銀スイッチ
・加速度センサー
このあたりでしょうか。
まずタッチセンサー。これは2通りのパターンがあります。
まずはロボットの前または後ろに床と垂直にスイッチ部を付ける方法。
これで前の場合はロボットが坂の前に来たとき、
後ろの場合は坂に入ってロボットの向きが傾いた際にのみセンサーが反応します。
後者のほうは後ろタッチと呼ばれていてLEGOレスキューⅠとかいうチームが最初に採用した技術です。
当時のレスキュー競技では坂からラインがないとかいうことはなかったので、
坂の検知は必要なかったのですが、坂を上る際に通常のライントレースの方法だとずり落ちるらしく、
その対策として使用したようです。
その対策が功を奏し、2006年度の東京ノードでは優勝していましたね。
でもその元チームメンバーがいうには、「今の競技では使えない」そうです。
坂の間ずっとセンサーが反応しているわけではないので「坂が終わったこと」が検知できないんだそうです。
それで最近のセンサーは全て坂にいる間、反応し続けているものになっているようです。
よくタッチセンサーで使われる手法は前後に動く重りなどをタッチセンサーの前に乗せて
坂で傾斜に入った際に重りが後ろにいくことでタッチセンサーが押される手法でしょうか。
まぁ今日はテストも近いのでこの辺で終わりにしましょう。
チルトセンサー以降はまた今度で・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ