RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
今回は、今年のロボットの紹介です。
今年のロボットはなんというか・・・
「遊んでみた」がテーマになっています。(きっと)
まぁどういうことかというと、今まで使ってなかったものを取り入れつつ、動けるロボットを作ろうというものですね。
結局その「今までなかったもの」が格段に多かったので、結果「遊んでみた。」になった訳ですが・・・
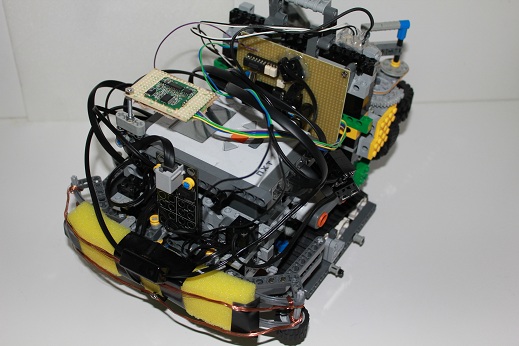
結果、こんな化け物が生まれることに(笑)
無茶苦茶に色々ついています。センサーの合計は17個・・・かな?
今回初投入したものというのは
・NXT
・I2C通信
・通電センサー
・超音波センサー
・加速度センサー
・串除けの囲い
・缶を持ち上げる気持ち悪いタイヤ機構
・意味不明なロジック積んだ基盤
・ポートマルチプレクサー
ETC・・・
といった感じです。非常に多いですね。いくらルールが変わったからとはいえ・・・
また、リレーによるセンサー切り替え(2009)、や坂タッチセンサー(2006)、クローラー駆動(2005)等、
過去に使用したシステムを再利用するケースも多かったです。
とにかく、今までのロボットの中では一番複雑なロボットだったことは間違いないと思います。
まぁセンサーの数の時点で、既にわかってることなんですけど(笑)
ライトセンサーなんか結局5個ですよ。まだ増えるかもしれません(笑)
しかも、ロボットが大体30㎝と比較的大きいので、
学校ではライントレースしてると、よくアリーナの壁にぶつかっていました。
なのでその対策を・・・なんて考えていたらバンプができないことが発覚して修正・・・
なんてことを繰り返しているうちに本番当日。
案の定調整が間に合わず、進行停止を4回もしてしまいました。まぁ缶までの課題は全てとったんだけど・・・
でも缶は持ちあがらず、結局そのまま8分間動かして時間切れでした。
うーん。やっぱり複雑すぎたか。もっと単純にした方がいいのかもしれません。
関東までになんとかしないと・・・まぁ。2週間しかありませんから(あと11日)余り大きいことはできませんね。
そんな感じで今日は今年のロボットの紹介でした。
あと、東東京ノードのロボット紹介は当日のカメラ忘れの都合により中止とさせていただきました。
(^・ω・)ノRadiumProduction in RoboCupJunior
今年のロボットはなんというか・・・
「遊んでみた」がテーマになっています。(きっと)
まぁどういうことかというと、今まで使ってなかったものを取り入れつつ、動けるロボットを作ろうというものですね。
結局その「今までなかったもの」が格段に多かったので、結果「遊んでみた。」になった訳ですが・・・
結果、こんな化け物が生まれることに(笑)
無茶苦茶に色々ついています。センサーの合計は17個・・・かな?
今回初投入したものというのは
・NXT
・I2C通信
・通電センサー
・超音波センサー
・加速度センサー
・串除けの囲い
・缶を持ち上げる気持ち悪いタイヤ機構
・意味不明なロジック積んだ基盤
・ポートマルチプレクサー
ETC・・・
といった感じです。非常に多いですね。いくらルールが変わったからとはいえ・・・
また、リレーによるセンサー切り替え(2009)、や坂タッチセンサー(2006)、クローラー駆動(2005)等、
過去に使用したシステムを再利用するケースも多かったです。
とにかく、今までのロボットの中では一番複雑なロボットだったことは間違いないと思います。
まぁセンサーの数の時点で、既にわかってることなんですけど(笑)
ライトセンサーなんか結局5個ですよ。まだ増えるかもしれません(笑)
しかも、ロボットが大体30㎝と比較的大きいので、
学校ではライントレースしてると、よくアリーナの壁にぶつかっていました。
なのでその対策を・・・なんて考えていたらバンプができないことが発覚して修正・・・
なんてことを繰り返しているうちに本番当日。
案の定調整が間に合わず、進行停止を4回もしてしまいました。まぁ缶までの課題は全てとったんだけど・・・
でも缶は持ちあがらず、結局そのまま8分間動かして時間切れでした。
うーん。やっぱり複雑すぎたか。もっと単純にした方がいいのかもしれません。
関東までになんとかしないと・・・まぁ。2週間しかありませんから(あと11日)余り大きいことはできませんね。
そんな感じで今日は今年のロボットの紹介でした。
あと、東東京ノードのロボット紹介は当日のカメラ忘れの都合により中止とさせていただきました。
(^・ω・)ノRadiumProduction in RoboCupJunior
Comments
※コメントは内容確認後に手動で公開するようにしております。反映までしばらくお待ちください。
※コメントは内容確認後に手動で公開するようにしております。反映までしばらくお待ちください。
無題
TK
こんにちは。
なんか、合宿の時の原型は残ってるようですけど、全体的に凄いことになってますね(笑)
そんな僕も、センサー11個くらい積んでて面白い感じになってますが。
何か去年のイスラエルのチームに似た感じになりました。
まあ、来年はもっとセンサーがふえる予定ですが。
僕も、PICとNXTの通信やってみたいですね。
ただ、アセンブラだから・・・(苦笑)
なんか、合宿の時の原型は残ってるようですけど、全体的に凄いことになってますね(笑)
そんな僕も、センサー11個くらい積んでて面白い感じになってますが。
何か去年のイスラエルのチームに似た感じになりました。
まあ、来年はもっとセンサーがふえる予定ですが。
僕も、PICとNXTの通信やってみたいですね。
ただ、アセンブラだから・・・(苦笑)
無題
Luz
TK様
こんにちは。
とりあえず前進して坂を登れるようにするためにモーターの位置を変えたら、結果このような状態になってしまいました(笑)
アセンブラですか!また難しいことやってますね・・・
こんにちは。
とりあえず前進して坂を登れるようにするためにモーターの位置を変えたら、結果このような状態になってしまいました(笑)
アセンブラですか!また難しいことやってますね・・・
無題
KOYO-Robotリーダー
こんにちは
僕は13個センサーを積んでいましたが、結局使ったのは3つです(変わった配置の光センサー)
工夫としては、チルトセンサーを直列につなぎ誤作動を減らしたのと、アームに通電センサーを付けることによって缶があるかを検知することができさらに缶をつかんでいるかも判別することができるようにしたことです、(使わなかったけど)
来年は、光センサーをラインセンサーにしてポートを減らし、ダブルバンパーをトリプルバンパーにしようと思います。
僕は13個センサーを積んでいましたが、結局使ったのは3つです(変わった配置の光センサー)
工夫としては、チルトセンサーを直列につなぎ誤作動を減らしたのと、アームに通電センサーを付けることによって缶があるかを検知することができさらに缶をつかんでいるかも判別することができるようにしたことです、(使わなかったけど)
来年は、光センサーをラインセンサーにしてポートを減らし、ダブルバンパーをトリプルバンパーにしようと思います。
無題
Luz
KOYO-Robotリーダー様
チルトセンサー直列はいいアイデアかもしれませんね。前後につければ回転誤動作も減りますし。
ラインセンサーというとあのマインドストーム社のものですか?
トリプルバンパー・・・恐ろしいことになりそうですね(笑)
チルトセンサー直列はいいアイデアかもしれませんね。前後につければ回転誤動作も減りますし。
ラインセンサーというとあのマインドストーム社のものですか?
トリプルバンパー・・・恐ろしいことになりそうですね(笑)
無題
KOYO-Robotリーダー
ラインセンサーは自作です、僕にそんなもの買えるお金なんてどこにもありません。
トリプルバンパーは、ハードウェアの作成が苦手なので、センサーとプログラムで克服しようかと、今回のは失敗しました。
トリプルバンパーは、ハードウェアの作成が苦手なので、センサーとプログラムで克服しようかと、今回のは失敗しました。
無題
Radium
KOYO-Robotリーダー様
成る程。まぁ結局あのセンサーは近々日本でも禁止にあるでしょうからね。
あんなプログラムだけでライントレースができるようなもの邪道ですからね・・・(笑)
成る程。まぁ結局あのセンサーは近々日本でも禁止にあるでしょうからね。
あんなプログラムだけでライントレースができるようなもの邪道ですからね・・・(笑)
無題
KOYO-Robotリーダー
こんばんは
うれしいことが2つありました
1つは6人も入部してきたということ
もう1つはヤバイクローラーを作ってしまったということです
6人も入ってくると合計10人ですか、
おそらく4チームほど出場するでしょう、
次にクローラーですが、本当にやばいです、
今言っちゃうともったいないくらいです、
長所としては、センサーの誤作動が減る、バンプで減速しない、坂もばっちし、と言ったところです、短所は、2.0のクローラー、ある部品をかなり使う、ちょっとでかい、これくらいです、いつかブログで紹介するので、期待してください(どこかのチームがやっていたかも?)
うれしいことが2つありました
1つは6人も入部してきたということ
もう1つはヤバイクローラーを作ってしまったということです
6人も入ってくると合計10人ですか、
おそらく4チームほど出場するでしょう、
次にクローラーですが、本当にやばいです、
今言っちゃうともったいないくらいです、
長所としては、センサーの誤作動が減る、バンプで減速しない、坂もばっちし、と言ったところです、短所は、2.0のクローラー、ある部品をかなり使う、ちょっとでかい、これくらいです、いつかブログで紹介するので、期待してください(どこかのチームがやっていたかも?)
無題
Luz
KOYO-Robotリーダー様
沢山入部しましたね(笑)
ここから最後まで何人残るかは先輩の指導にかかていますからね。頑張ってください。
ヤバいクローラーですか・・・気になりますね。公開を楽しみにしています。
沢山入部しましたね(笑)
ここから最後まで何人残るかは先輩の指導にかかていますからね。頑張ってください。
ヤバいクローラーですか・・・気になりますね。公開を楽しみにしています。
Re:無題
質問 様
コメントありがとうございます。
ずいぶん古いロボットですが、これは左右のタイヤで缶を挟んで巻き上げる機構となっています。水平方向に回転するタイヤで缶を引き込み、垂直方向のタイヤで持ち上げています。
コメントありがとうございます。
ずいぶん古いロボットですが、これは左右のタイヤで缶を挟んで巻き上げる機構となっています。水平方向に回転するタイヤで缶を引き込み、垂直方向のタイヤで持ち上げています。
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ