RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
電池を変えたらちょっと早くなりましたがまだやっぱりのろのろですね。
今年は速度で攻めようという予定があったんですが、 どうやら方針転換に迫られているようです。
ロボットもできてないし・・・
というわけで今日は現実逃避(期末的な意味で)も兼ねて、昔のロボットの紹介です。
といってもこの機体・・・何回も紹介してますよね。これからも何回も紹介しますよ(笑)
まぁ他の子達もいるので他の子達の紹介も今度致します。
今までのRadiumは「ハウルの動く城」だの「レスキューロボットの皮を被った戦車」だのと
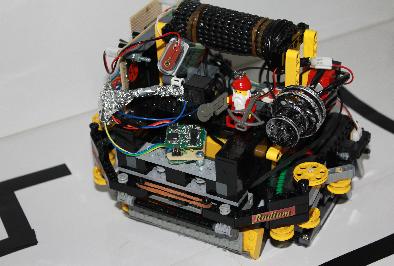
内外からよく「ごっつい」と言われるような外見のロボットの作っていますが、
実は個人的に、スタイルとしてはシンプル、そして確実、
そして「静か」を貫いてきました。
特に音に関してはよく周りの人に驚かれましたね
「無音だ!」とか叫ばれていた時期もありましたが、無音ではないんですよー。
それでも、自作機とかNXT、学校のRCXとかに比べるとやっぱり静かですね。たまに動かすと驚きますよ。
あとエボルタなんで地味に速いです。特に電池変えた後とかはおかしいです。
でも電池一年以上変えてないなー。今変えたらやっぱりむっちゃ速くなんだろうなー。
今のところ、作っているNXTのロボットは、このロボットに匹敵するライントレースは未だできないままです。
いったいこんなのどうやって作ったのか・・・
プログラムのソースがUSBの焼失←によって消失したので永遠の謎になってしまいました。
なんで焼失したかって?PICでUSBメモリの読み出した時に短絡して(うわなにするやめry
というわけで今のところ、このロボットを超えるライントレースをすることが当面の目的です。
達成できる気配すらありませんが(笑)
ちなみにライントレースは補助基盤がなくてもできるようになってます。
その補助基盤の写真がこれ。ずいぶん昔に作ったのでいろいろと残念ですが・・・
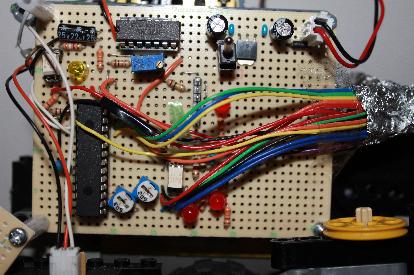
簡単に説明すると左下のゲジゲジがPICというマイクロコントローラーです。16F873Aって書いてありました。
結構古い型使ってたんですね。てっきり24Fだと思ってた。
その隣のネジっぽいやつが可変抵抗。これは緑センサー用のLEDの明るさの調整用です。
確かフルカラーだったはず。
それでその隣にある白いのとPICの上にある白いのがフォトカプラという素子です。
これは(説明略)というもので、これをPICで制御してRCXと通信してました。
上のフォトカプラの近くの黄LEDが恐らく通信のデバッカです
LEDの可変抵抗の近くの赤LEDは緑の検知を示すLEDです。
これはセンサーの値を直接デジ値で出してるのではなく、PICから出力しています
ちなみにその右にある上下2つの赤LEDは水銀の検知デバッカです。
上のLEDの上の部分が電源部分でその左にあるICとかその辺が緑センサーのデジタル変換部です。
でも結果的に緑センサーがアナログに変更されたので使ってません。ただ電気食ってるだけです。
残りのセンサーはPICに直接接続されています。コードの束があるのはそのためです。
これで一通り説明かな。
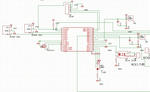
最後に回路図です。最後の変更からフィードバックしてない気がするので間違ってるかも。
ちなみに緑センサーのデジタル部分はないです。

今思えばシンガポールで24Fのことふつうに「にーよんえふ」って言ってたけどなんで通じたんだろう。
(^・ω・)ノRadiumProduction in RoboCupJunior
今年は速度で攻めようという予定があったんですが、 どうやら方針転換に迫られているようです。
ロボットもできてないし・・・
というわけで今日は現実逃避(期末的な意味で)も兼ねて、昔のロボットの紹介です。
といってもこの機体・・・何回も紹介してますよね。これからも何回も紹介しますよ(笑)
まぁ他の子達もいるので他の子達の紹介も今度致します。
今までのRadiumは「ハウルの動く城」だの「レスキューロボットの皮を被った戦車」だのと
内外からよく「ごっつい」と言われるような外見のロボットの作っていますが、
実は個人的に、スタイルとしてはシンプル、そして確実、
そして「静か」を貫いてきました。
特に音に関してはよく周りの人に驚かれましたね
「無音だ!」とか叫ばれていた時期もありましたが、無音ではないんですよー。
それでも、自作機とかNXT、学校のRCXとかに比べるとやっぱり静かですね。たまに動かすと驚きますよ。
あとエボルタなんで地味に速いです。特に電池変えた後とかはおかしいです。
でも電池一年以上変えてないなー。今変えたらやっぱりむっちゃ速くなんだろうなー。
今のところ、作っているNXTのロボットは、このロボットに匹敵するライントレースは未だできないままです。
いったいこんなのどうやって作ったのか・・・
プログラムのソースがUSBの焼失←によって消失したので永遠の謎になってしまいました。
なんで焼失したかって?PICでUSBメモリの読み出した時に短絡して(うわなにするやめry
というわけで今のところ、このロボットを超えるライントレースをすることが当面の目的です。
達成できる気配すらありませんが(笑)
ちなみにライントレースは補助基盤がなくてもできるようになってます。
その補助基盤の写真がこれ。ずいぶん昔に作ったのでいろいろと残念ですが・・・
簡単に説明すると左下のゲジゲジがPICというマイクロコントローラーです。16F873Aって書いてありました。
結構古い型使ってたんですね。てっきり24Fだと思ってた。
その隣のネジっぽいやつが可変抵抗。これは緑センサー用のLEDの明るさの調整用です。
確かフルカラーだったはず。
それでその隣にある白いのとPICの上にある白いのがフォトカプラという素子です。
これは(説明略)というもので、これをPICで制御してRCXと通信してました。
上のフォトカプラの近くの黄LEDが恐らく通信のデバッカです
LEDの可変抵抗の近くの赤LEDは緑の検知を示すLEDです。
これはセンサーの値を直接デジ値で出してるのではなく、PICから出力しています
ちなみにその右にある上下2つの赤LEDは水銀の検知デバッカです。
上のLEDの上の部分が電源部分でその左にあるICとかその辺が緑センサーのデジタル変換部です。
でも結果的に緑センサーがアナログに変更されたので使ってません。ただ電気食ってるだけです。
残りのセンサーはPICに直接接続されています。コードの束があるのはそのためです。
これで一通り説明かな。
最後に回路図です。最後の変更からフィードバックしてない気がするので間違ってるかも。
ちなみに緑センサーのデジタル部分はないです。
今思えばシンガポールで24Fのことふつうに「にーよんえふ」って言ってたけどなんで通じたんだろう。
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ