RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
今年度、うちの部活で完全封印したソフトがあります。
その名はROBOLAB。さて、どういったソフトなのでしょう。
まず、起動してみます。
まずこんな画面がでます。この画面の出ている時間はPCのスペックに反比例しています。
つまりこの画面の出ている時間で自分のPCのスペックがわかるという、
素晴らしい機能がまず最初に作動するという訳です。
特に意味はありませんが。
そしてこれが終わるとこんな画面に。
ここで右下の終了を押すと
このように表示されてここで「終了」を押すと、RABOLABが終了します。
これがあらかたのROBOLABソフトウェアの使い方は説明したかと思います。
・・・と部活の講習ではこういった感じの説明をしてROBOLABについては一切話さない予定なのですが・・・
これではROBOLABを作ったタフツ大学とNational Instruments 社に怒られそうなので続きの説明を行います。
まずさっきの画面でプログラマを選択します。
それでこの画面に、因みにファームを入れる際にはアドミニストレーターを開いてください。
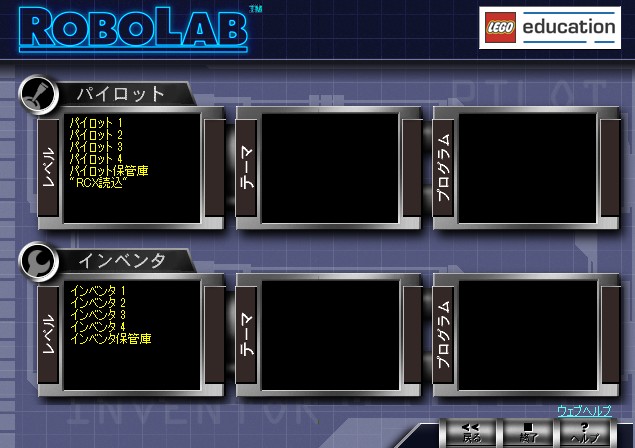
それでパイロット1からインベンタ4までで使いたい環境を設定します。
パイロットは本当に最初の最初、最小限のことしかできないのであまりお勧めしません。
1から4の数字はなにが違うかというと、使えるプログラムの命令の種類が違います。
数字が大きい方が多いです。
という訳で、ここでは一番大きなインベンタ4を動かしてみます。
とりあえずはこんな感じになります。
右下にあるパレットから命令を引っ張り出して真ん中の白いところに置いて、
それをピンクの線でつないでプログラムするという仕組みです。
例えば、単純にロボットを一秒間前進させて停止させるプログラムだと、
こんな感じです。青信号がプログラムの開始、赤信号がプログラムの終了を意味しています。
その中で灰色のモーターっぽいやつがモーターを動かす命令です。
ここではAモーターとCモーターを駆動させることを別々に命令しています。
その次の黄色い時計みたいなものが、時間待ちの指定です。これは一秒待ちの命令なので、
A,Cモーターを駆動させたまま、1秒間その状態を保持するという命令です。
最後の真赤な丸がモーター停止の命令。これをいれることで1秒たった後でモーターは停止します。
まぁこのような感じでプログラムを作っていきます。
そのパターンで作られたレスキューのプログラムが此方。
殆どなんにも無いように見えますが、下のタスクバーを見てください。
プログラムが巨大すぎて、全然画面に収まり切っていないのです。
この時のプログラムは4Mbyteほどいったでしょうか。RCXにダウンロードできるギリギリのサイズのプログラムでした。
当時だとROBOLABでこれだけのサイズというのは他に見たことがないですね・・・悪い例の一つということで・・・
このような感じでROBOLABではプログラムを作っていきます。
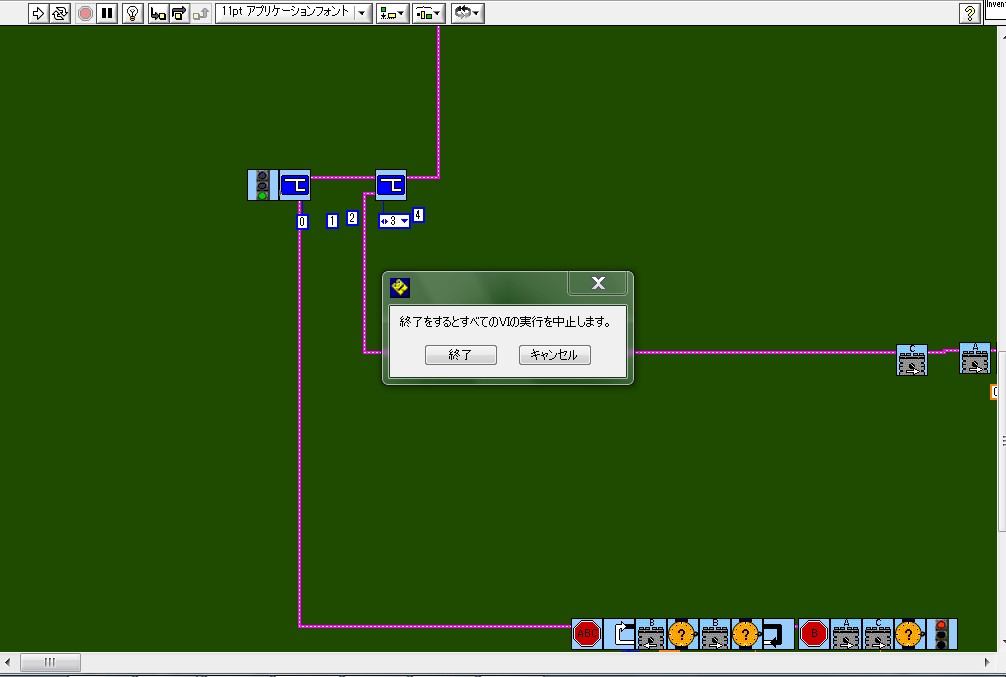
またプログラムを開いた状態からROBOLABを終了させる際にはCtrl+Qを使います。
すると、まずこのような画面が出て、
ここで終了を押すとこうなって
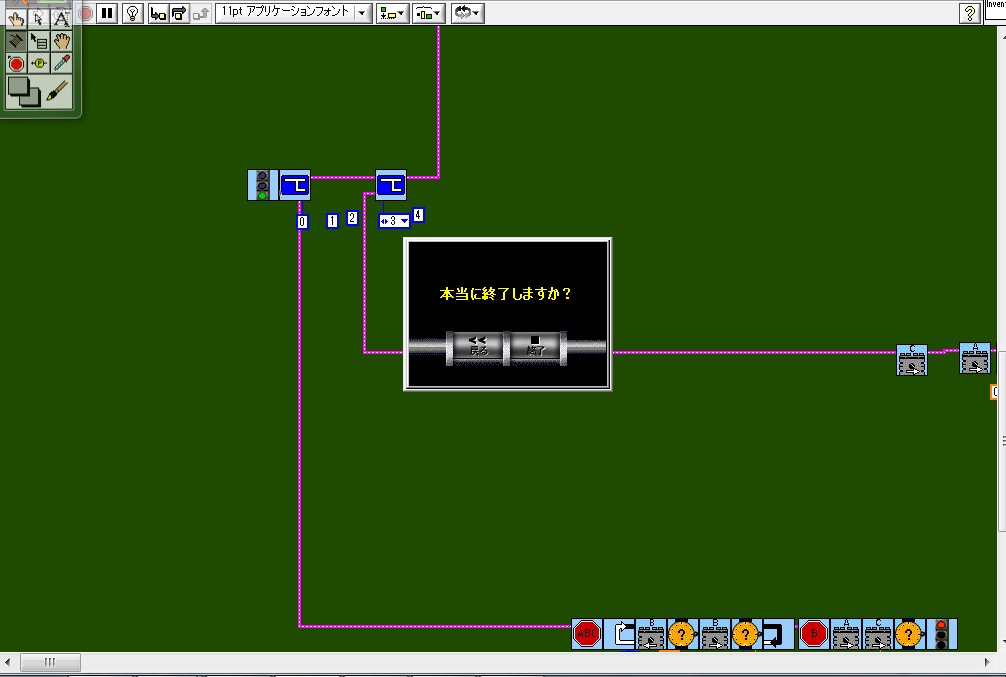
ここで終了を押すと勝手に終了します。
プログラムの変更が保存されていないと、保存の確認はちゃんと聞いてくれるのでその辺りの心配はいりません。
とまぁこれで簡単な説明は終了です、命令の説明とかはROBOLABのヘルプがやってくれるので省略します。
こんな風に便利なROBOLABですが、プログラムが複雑になると意味不明になる上、
どうにも容量を食うのでうちの部活では封印しました。
うちの部活ではこれの代わりにNQCというものを採用しています。
まぁ時間があればこちらの説明もいつか行おうと考えています、
それでは。
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s
よく、ROBORAB とかROBOLABOとか、酷い時にはROBORABOと間違われることがあるそうです。
その名はROBOLAB。さて、どういったソフトなのでしょう。
まず、起動してみます。
まずこんな画面がでます。この画面の出ている時間はPCのスペックに反比例しています。
つまりこの画面の出ている時間で自分のPCのスペックがわかるという、
素晴らしい機能がまず最初に作動するという訳です。
特に意味はありませんが。
そしてこれが終わるとこんな画面に。
ここで右下の終了を押すと
このように表示されてここで「終了」を押すと、RABOLABが終了します。
これがあらかたのROBOLABソフトウェアの使い方は説明したかと思います。
・・・と部活の講習ではこういった感じの説明をしてROBOLABについては一切話さない予定なのですが・・・
これではROBOLABを作ったタフツ大学とNational Instruments 社に怒られそうなので続きの説明を行います。
まずさっきの画面でプログラマを選択します。
それでこの画面に、因みにファームを入れる際にはアドミニストレーターを開いてください。
それでパイロット1からインベンタ4までで使いたい環境を設定します。
パイロットは本当に最初の最初、最小限のことしかできないのであまりお勧めしません。
1から4の数字はなにが違うかというと、使えるプログラムの命令の種類が違います。
数字が大きい方が多いです。
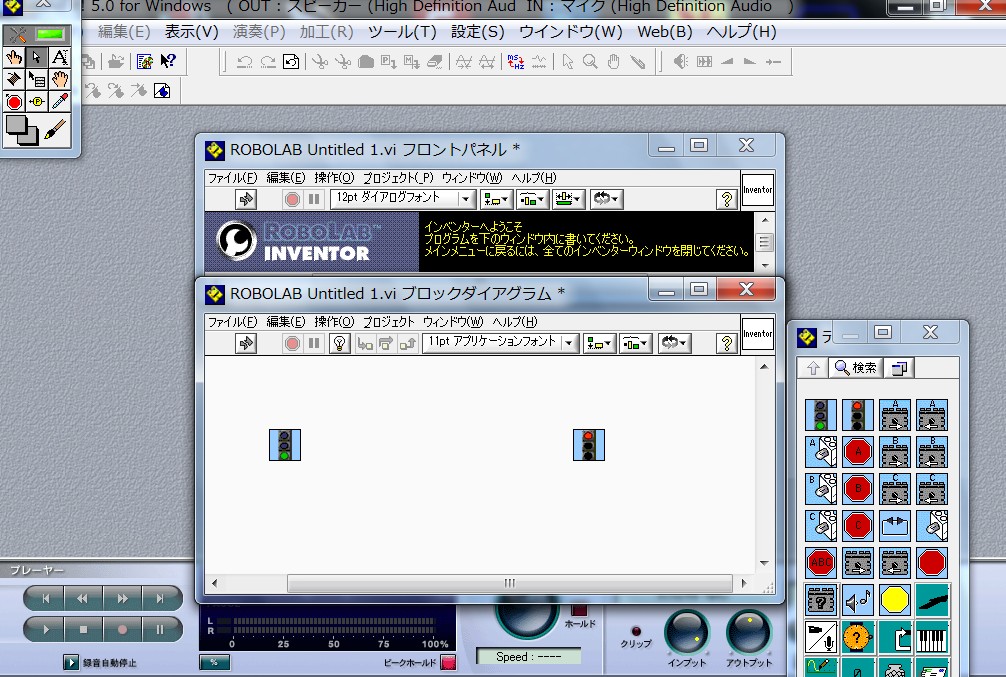
という訳で、ここでは一番大きなインベンタ4を動かしてみます。
とりあえずはこんな感じになります。
右下にあるパレットから命令を引っ張り出して真ん中の白いところに置いて、
それをピンクの線でつないでプログラムするという仕組みです。
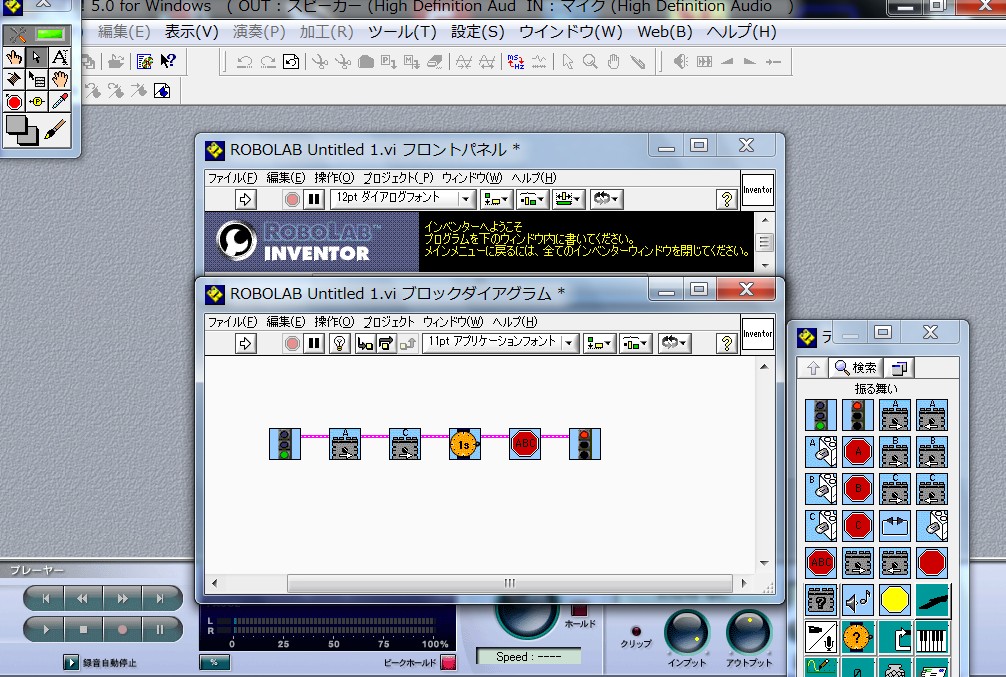
例えば、単純にロボットを一秒間前進させて停止させるプログラムだと、
こんな感じです。青信号がプログラムの開始、赤信号がプログラムの終了を意味しています。
その中で灰色のモーターっぽいやつがモーターを動かす命令です。
ここではAモーターとCモーターを駆動させることを別々に命令しています。
その次の黄色い時計みたいなものが、時間待ちの指定です。これは一秒待ちの命令なので、
A,Cモーターを駆動させたまま、1秒間その状態を保持するという命令です。
最後の真赤な丸がモーター停止の命令。これをいれることで1秒たった後でモーターは停止します。
まぁこのような感じでプログラムを作っていきます。
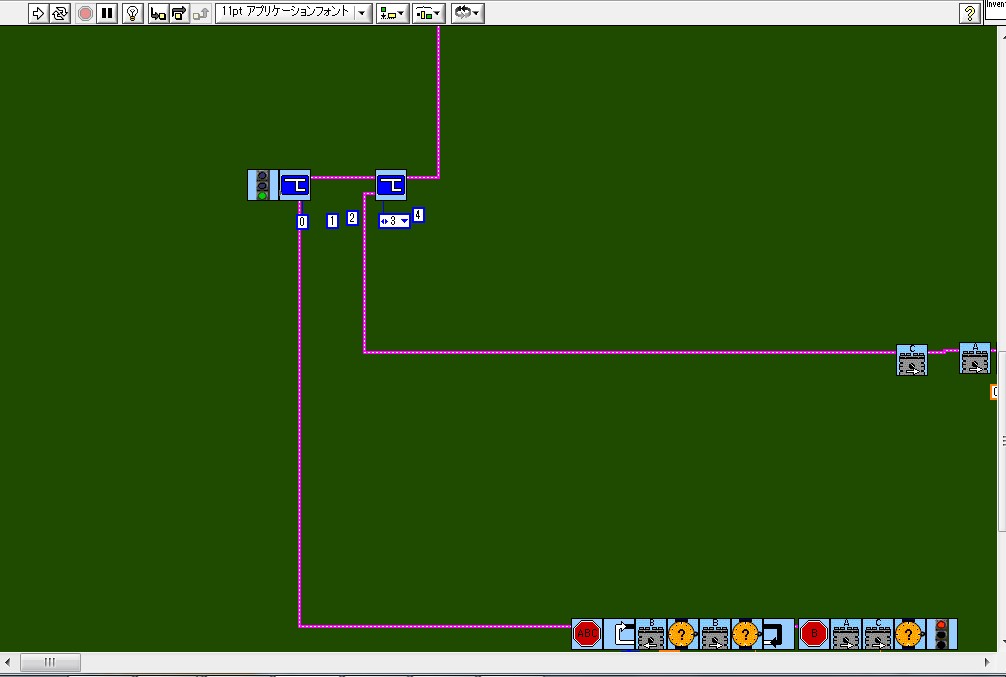
そのパターンで作られたレスキューのプログラムが此方。
殆どなんにも無いように見えますが、下のタスクバーを見てください。
プログラムが巨大すぎて、全然画面に収まり切っていないのです。
この時のプログラムは4Mbyteほどいったでしょうか。RCXにダウンロードできるギリギリのサイズのプログラムでした。
当時だとROBOLABでこれだけのサイズというのは他に見たことがないですね・・・悪い例の一つということで・・・
このような感じでROBOLABではプログラムを作っていきます。
またプログラムを開いた状態からROBOLABを終了させる際にはCtrl+Qを使います。
すると、まずこのような画面が出て、
ここで終了を押すとこうなって
ここで終了を押すと勝手に終了します。
プログラムの変更が保存されていないと、保存の確認はちゃんと聞いてくれるのでその辺りの心配はいりません。
とまぁこれで簡単な説明は終了です、命令の説明とかはROBOLABのヘルプがやってくれるので省略します。
こんな風に便利なROBOLABですが、プログラムが複雑になると意味不明になる上、
どうにも容量を食うのでうちの部活では封印しました。
うちの部活ではこれの代わりにNQCというものを採用しています。
まぁ時間があればこちらの説明もいつか行おうと考えています、
それでは。
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s
よく、ROBORAB とかROBOLABOとか、酷い時にはROBORABOと間違われることがあるそうです。
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ