RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
今日は赤外線測距センサーについて書こうと思います。
赤外線測距センサー、以前に測距センサーとして超音波センサーを紹介したかと思うのですが、
あれは音波を出して、それが反射して戻ってくるまでの時間を測るものでした。
この赤外線測距センサーはそうではなくて、音波の代わりに赤外線を出して、
その赤外線が戻ってくる反射量、反射角を計測するセンサーです。
よくEOPDセンサーとかPSDセンサー等と呼ばれるものですね。
因みにEOPDとはElectro Optical Proximity Detectorの略語で、
日本語にすると「電気、光学的近接センサー」という風な感じになります。
PSDはPosition Sensitive Deviceの略で日本語にすると「位置検出素子」となります。
種類によって検知できる距離の範囲が異なりますが、僕がよく使用しているのは
10~80㎝程、つまりNXTの超音波センサーを同等の検出範囲を持つ
このセンサーです。

型番はGP2Y0A21YK というもので秋月電子通商にて400円ほどで売ってます。シャープ製ですね。
これは単純にアナログの出力となっていて電源の5V、GND、信号の出力の3本線となっています。
以前に紹介したコレには2個ほど搭載されています。
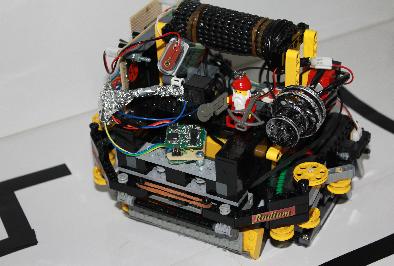
コレ↑
ところで、このセンサーですが、測定対象から最低でも10㎝以上離れないと値が正しく測定できません。
大体フィールドの通路の幅が30㎝で設計されているレスキューのフィールドでは
このセンサーを左右につけてしまうと、通路ではどちらのセンサーも正しい値が返ってきません。
特に坂の前進補正なんかに使いたい場合はロボットの端につけては使いようがありません。
なのに、なんでこのロボットは、こんな一番端にセンサーを付けてしまったのでしょう・・・
謎は深まるばかりです。
結局片方しか使わなかったような・・・まぁいいか。
とりあえず今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
赤外線測距センサー、以前に測距センサーとして超音波センサーを紹介したかと思うのですが、
あれは音波を出して、それが反射して戻ってくるまでの時間を測るものでした。
この赤外線測距センサーはそうではなくて、音波の代わりに赤外線を出して、
その赤外線が戻ってくる反射量、反射角を計測するセンサーです。
よくEOPDセンサーとかPSDセンサー等と呼ばれるものですね。
因みにEOPDとはElectro Optical Proximity Detectorの略語で、
日本語にすると「電気、光学的近接センサー」という風な感じになります。
PSDはPosition Sensitive Deviceの略で日本語にすると「位置検出素子」となります。
種類によって検知できる距離の範囲が異なりますが、僕がよく使用しているのは
10~80㎝程、つまりNXTの超音波センサーを同等の検出範囲を持つ
このセンサーです。
型番はGP2Y0A21YK というもので秋月電子通商にて400円ほどで売ってます。シャープ製ですね。
これは単純にアナログの出力となっていて電源の5V、GND、信号の出力の3本線となっています。
以前に紹介したコレには2個ほど搭載されています。
コレ↑
ところで、このセンサーですが、測定対象から最低でも10㎝以上離れないと値が正しく測定できません。
大体フィールドの通路の幅が30㎝で設計されているレスキューのフィールドでは
このセンサーを左右につけてしまうと、通路ではどちらのセンサーも正しい値が返ってきません。
特に坂の前進補正なんかに使いたい場合はロボットの端につけては使いようがありません。
なのに、なんでこのロボットは、こんな一番端にセンサーを付けてしまったのでしょう・・・
謎は深まるばかりです。
結局片方しか使わなかったような・・・まぁいいか。
とりあえず今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ