RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
どうやら日本の研究チームが世界で初めて、レーザー核融合の制御に成功したようです。
この研究に成功したのは静岡県の光産業創成大学院大学で、浜松ホトニクスやトヨタ自動車などとの共同研究だそうです。
レーザーによる核融合はCO2を一切排出しない上に従来の核分裂より放射性廃棄物が極めて少ないことから
クリーンな次世代技術として注目されているとようですが、
発表内容は「連続100回の成功」となっています。
この前あのような事故が起きたばかりですから、まだ実用段階とは言えない実験回数だとは思います。
まぁあの事故は国が津波に対しての対策を怠ったことが原因であって、原発自体の性能には問題はないはずなんですけどね・・・。
そもそも脱原発の流れが世界的に進んでいる中、この発表はどう受け止められるのでしょうねぇ・・・。
でも今だから原発=放射能というイメージがありますが、
今の線量だったら飛行機に乗ったほうがずっと高い放射能浴びますし、
そもそもこういった大学や研究機関にも放射性物質はありますし、高専にも放射能なんたら室ってありますしね。
昔だったら塗材にも使われていましたし、温泉って放射能浴びに行くようなものですし、
結構放射能って身近なはずですよね。
なのに今はちょっと世間がかなり過剰な反応をしてしまっているから風当たりは強いかもしれません。
ニュースでもこの件については聞きませんし、この先この手の研究はどうなってしまうのでしょうね。
(^・ω・)ノ RadiumProduction in RoboCup Junior
この研究に成功したのは静岡県の光産業創成大学院大学で、浜松ホトニクスやトヨタ自動車などとの共同研究だそうです。
レーザーによる核融合はCO2を一切排出しない上に従来の核分裂より放射性廃棄物が極めて少ないことから
クリーンな次世代技術として注目されているとようですが、
発表内容は「連続100回の成功」となっています。
この前あのような事故が起きたばかりですから、まだ実用段階とは言えない実験回数だとは思います。
まぁあの事故は国が津波に対しての対策を怠ったことが原因であって、原発自体の性能には問題はないはずなんですけどね・・・。
そもそも脱原発の流れが世界的に進んでいる中、この発表はどう受け止められるのでしょうねぇ・・・。
でも今だから原発=放射能というイメージがありますが、
今の線量だったら飛行機に乗ったほうがずっと高い放射能浴びますし、
そもそもこういった大学や研究機関にも放射性物質はありますし、高専にも放射能なんたら室ってありますしね。
昔だったら塗材にも使われていましたし、温泉って放射能浴びに行くようなものですし、
結構放射能って身近なはずですよね。
なのに今はちょっと世間がかなり過剰な反応をしてしまっているから風当たりは強いかもしれません。
ニュースでもこの件については聞きませんし、この先この手の研究はどうなってしまうのでしょうね。
(^・ω・)ノ RadiumProduction in RoboCup Junior
という訳で今日は平成24年度第一回部室の掃除を行いました。
今日はフィールドの清掃とレゴブロックの仕分けを行いました。あれ?部室の掃除してない・・・。
と言っても僕は定期券購入の為途中離脱したので終わったのかどうかはわかりません。
結構レゴの箱を借りていたのでちゃんと終わったかどうか・・・。
まぁそんなことを一年生がしている間に、なんと僕は一人違うことをしていました。
まずは本年度の会計書類の作成。といっても収入がほぼ皆無なので2行で終わりましたけど。
そして今年度の産技祭の予定の草案の作成。今年もなんか売るっぽい流れになっています。
去年よりかは売れるように頑張りたいですね。去年はギリギリ黒字だったので・・・
モノも去年よりかはまともなものを売るつもりなので宜しくお願い致します。
まぁこのままの流れで行くと、去年とは段違いのものを売ることになりそうですけど・・・。
そして一番堪えたのが回路部品の整理。
今部室にある回路部品の約○○割は僕の私物だったりしますので部室の回路部品の整理=私物整理なのですが・・・。
正直言って、多すぎる。部員からは「わーここに秋月があるー」なんて言われてしまいました。
まぁ確かに、ロボカップで使いそうな回路部品は大抵買っちゃっていますけど・・・。
だって安いから・・・仕方ないです。
でも、揃えてから一度もまともに整理したことがなかったので、正直何が何処にあるのやら・・・。
かなりまずい状態になっていました。
なのでこれを機に整理をしてみたのですが、というより試みたのですが・・・
ムリ(笑)
あっけなく定期券購入の時間がやってきてしまったので明後日以降に持ち越しとなってしまいました。
まず、秋月の袋を開けると、どんどん同じ抵抗の袋が出てくる・・・。鬱々真っ盛り状態でした。
しかも意味不明なくらい28ピンのピンソケットが見つかるし・・・フォトカプラは5個単位でどんどん湧いて出てくるし・・・
挙句の果てには水銀スイッチが奥のほうからわしゃわしゃ出てきました。
・・・。一年前に整理しとけばよかった・・・。
という訳で皆さん、回路素子の整理はしっかりとしたほうがいいですよ。という忠告をさせて頂きます(笑)
因みにこれを機に僕はExcelで物品管理を行なうことにしました。ロボコン時代の知恵ですね。
でもよく考えると部室だけじゃなくて家にも同じくらい未整理の回路部品ってあったような・・・。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今日はフィールドの清掃とレゴブロックの仕分けを行いました。あれ?部室の掃除してない・・・。
と言っても僕は定期券購入の為途中離脱したので終わったのかどうかはわかりません。
結構レゴの箱を借りていたのでちゃんと終わったかどうか・・・。
まぁそんなことを一年生がしている間に、なんと僕は一人違うことをしていました。
まずは本年度の会計書類の作成。といっても収入がほぼ皆無なので2行で終わりましたけど。
そして今年度の産技祭の予定の草案の作成。今年もなんか売るっぽい流れになっています。
去年よりかは売れるように頑張りたいですね。去年はギリギリ黒字だったので・・・
モノも去年よりかはまともなものを売るつもりなので宜しくお願い致します。
まぁこのままの流れで行くと、去年とは段違いのものを売ることになりそうですけど・・・。
そして一番堪えたのが回路部品の整理。
今部室にある回路部品の約○○割は僕の私物だったりしますので部室の回路部品の整理=私物整理なのですが・・・。
正直言って、多すぎる。部員からは「わーここに秋月があるー」なんて言われてしまいました。
まぁ確かに、ロボカップで使いそうな回路部品は大抵買っちゃっていますけど・・・。
だって安いから・・・仕方ないです。
でも、揃えてから一度もまともに整理したことがなかったので、正直何が何処にあるのやら・・・。
かなりまずい状態になっていました。
なのでこれを機に整理をしてみたのですが、というより試みたのですが・・・
ムリ(笑)
あっけなく定期券購入の時間がやってきてしまったので明後日以降に持ち越しとなってしまいました。
まず、秋月の袋を開けると、どんどん同じ抵抗の袋が出てくる・・・。鬱々真っ盛り状態でした。
しかも意味不明なくらい28ピンのピンソケットが見つかるし・・・フォトカプラは5個単位でどんどん湧いて出てくるし・・・
挙句の果てには水銀スイッチが奥のほうからわしゃわしゃ出てきました。
・・・。一年前に整理しとけばよかった・・・。
という訳で皆さん、回路素子の整理はしっかりとしたほうがいいですよ。という忠告をさせて頂きます(笑)
因みにこれを機に僕はExcelで物品管理を行なうことにしました。ロボコン時代の知恵ですね。
でもよく考えると部室だけじゃなくて家にも同じくらい未整理の回路部品ってあったような・・・。
(^・ω・)ノ RadiumProduction in RoboCup Junior
先程、らじぷろの目次が完成しました。
まぁ目次といっても全ての記事に対しての目次ではなく、
ロボカップの説明の記事
回路系の説明の記事
PICの説明の記事
C言語の説明の記事
現在この4つについての目次をまとめたものを表示しています。
レゴのセンサーに関してはカテゴリー内に別途分けてありますので、ここでは今のところ整理していません。
NXT等のLEGOに関しては要望があり次第という形になります。
目次の場所ですが、リンクとアクセスカウンターの間
ここになります。大体最新記事のタイトルがある辺りになりますね。
クリックして頂けると中が見れますので、そこから見たいページを選んでクリックして下さい。
意外と30分ほどでできましたね。結構エラー吐いたけど・・・。
やっぱりJavascriptは面倒です。
それではまた。トップページも更新しなきゃ。
(^・ω・)ノ RadiumProduction in RoboCup Junior
まぁ目次といっても全ての記事に対しての目次ではなく、
ロボカップの説明の記事
回路系の説明の記事
PICの説明の記事
C言語の説明の記事
現在この4つについての目次をまとめたものを表示しています。
レゴのセンサーに関してはカテゴリー内に別途分けてありますので、ここでは今のところ整理していません。
NXT等のLEGOに関しては要望があり次第という形になります。
目次の場所ですが、リンクとアクセスカウンターの間
ここになります。大体最新記事のタイトルがある辺りになりますね。
クリックして頂けると中が見れますので、そこから見たいページを選んでクリックして下さい。
意外と30分ほどでできましたね。結構エラー吐いたけど・・・。
やっぱりJavascriptは面倒です。
それではまた。トップページも更新しなきゃ。
(^・ω・)ノ RadiumProduction in RoboCup Junior
とりあえず宣伝だけ。
先程も新しく配列の記事を更新しましたが、ロボカップの説明の記事と回路系統の説明の記事、
それとプログラムの説明の記事とPICの記事は元々部員へのデータベースとして構築したものなのですが
よく考えると古い記事とか辿りつける雰囲気がさらさらなさそうなので内部リンクを作ってみようと思います。
最初は検索だけで行けるかなぁと思っていたのですが、やっぱり難しいみたいです。
とりあえずプラグインのリンクの前後辺りに配置しようと考えているので宜しくお願い致します。
今日中にできるといいなぁ。
(^・ω・)ノ RadiumProduction in RoboCup Junior
先程も新しく配列の記事を更新しましたが、ロボカップの説明の記事と回路系統の説明の記事、
それとプログラムの説明の記事とPICの記事は元々部員へのデータベースとして構築したものなのですが
よく考えると古い記事とか辿りつける雰囲気がさらさらなさそうなので内部リンクを作ってみようと思います。
最初は検索だけで行けるかなぁと思っていたのですが、やっぱり難しいみたいです。
とりあえずプラグインのリンクの前後辺りに配置しようと考えているので宜しくお願い致します。
今日中にできるといいなぁ。
(^・ω・)ノ RadiumProduction in RoboCup Junior
さて、いつ以来でしょうか。
去年の後期中間で一人勝ちした電磁気以来のようですね。
という訳で配列の記事です。前回の記事は此方。
前回は、配列とは、複数の変数を要素という形で同時に宣言して便利に使えるよーというものであることを説明しました。
今回は実際に配列の宣言の方法、使い方について説明します。
まずは配列xを宣言してみましょう。
配列は変数と同じように名前を持っていて、変数と同じように宣言をすることができます。
基本的な配列の宣言方法はこんな感じです。
int x[5];
これでint型の配列を5個宣言することができました。配列の型はそのまま配列の要素の型になります。
そして配列に値を入れるときはこのようにします。
x[0]=1;
これで配列xの番目の要素に1が入りました。
配列に値を入れるというより、配列の要素に値を入れるという方が正しい表現ですね。
実は配列そのものは抽象的な概念なので実体を持つものではありません。
要するに配列名(ここでいうx)というのは電車の名称で、配列の要素というのは電車の車両という訳です。
皆さんは電車に乗るとき、電車の車両に乗りますよね?車両以外の部分には乗らないはずです。
それと同じで、配列も値を代入するときには「要素」に代入するんです。
そしてここで注意するべきなのは、要素の番号です。
電車の場合は一号車、2号車という風に、番号は1から始まっていますが、
配列・・・というより一般的にプログラムの世界では、数字の始まりは0からなのです。
つまり配列も、0番目の要素、1番目の要素・・・という風になっています。
なのでint x[5];で配列を5個定義すると、使える要素は
x[0]、x[1]、x[2]、x[3]、x[4]
の5個なのです。x[5]は5番目ですが、6個目なので使えません。
まぁこれが配列で注意するべきところでしょうか。これさえわかれば配列はもう自由に使うことができると思います。
只、例えば普通の変数だと、int x=5;のように、変数の宣言と同時に初期値を代入することができましたが、
配列はint x[5]=5;で初期化はできません。値が実際に格納されるのは要素の方ですからね。
配列で宣言時に値を代入するときには次のような方法を用います。
int x[5]={0,1,2,3,4};
このように、中括弧でくくってカンマで分けます。これで0から順番に要素の初期値を代入することができます。
基本的な配列の使い方は以上です。
まぁでもこれだけだと、「複数の変数をまとめて定義出来るだけ」ですよね。
次回の記事ではこの配列のメリット、実践的な使い方について説明します。
という訳で今日はこのへんで。
(^・ω・)ノ RadiumProduction in RoboCup Junior
去年の後期中間で一人勝ちした電磁気以来のようですね。
という訳で配列の記事です。前回の記事は此方。
前回は、配列とは、複数の変数を要素という形で同時に宣言して便利に使えるよーというものであることを説明しました。
今回は実際に配列の宣言の方法、使い方について説明します。
まずは配列xを宣言してみましょう。
配列は変数と同じように名前を持っていて、変数と同じように宣言をすることができます。
基本的な配列の宣言方法はこんな感じです。
int x[5];
これでint型の配列を5個宣言することができました。配列の型はそのまま配列の要素の型になります。
そして配列に値を入れるときはこのようにします。
x[0]=1;
これで配列xの番目の要素に1が入りました。
配列に値を入れるというより、配列の要素に値を入れるという方が正しい表現ですね。
実は配列そのものは抽象的な概念なので実体を持つものではありません。
要するに配列名(ここでいうx)というのは電車の名称で、配列の要素というのは電車の車両という訳です。
皆さんは電車に乗るとき、電車の車両に乗りますよね?車両以外の部分には乗らないはずです。
それと同じで、配列も値を代入するときには「要素」に代入するんです。
そしてここで注意するべきなのは、要素の番号です。
電車の場合は一号車、2号車という風に、番号は1から始まっていますが、
配列・・・というより一般的にプログラムの世界では、数字の始まりは0からなのです。
つまり配列も、0番目の要素、1番目の要素・・・という風になっています。
なのでint x[5];で配列を5個定義すると、使える要素は
x[0]、x[1]、x[2]、x[3]、x[4]
の5個なのです。x[5]は5番目ですが、6個目なので使えません。
まぁこれが配列で注意するべきところでしょうか。これさえわかれば配列はもう自由に使うことができると思います。
只、例えば普通の変数だと、int x=5;のように、変数の宣言と同時に初期値を代入することができましたが、
配列はint x[5]=5;で初期化はできません。値が実際に格納されるのは要素の方ですからね。
配列で宣言時に値を代入するときには次のような方法を用います。
int x[5]={0,1,2,3,4};
このように、中括弧でくくってカンマで分けます。これで0から順番に要素の初期値を代入することができます。
基本的な配列の使い方は以上です。
まぁでもこれだけだと、「複数の変数をまとめて定義出来るだけ」ですよね。
次回の記事ではこの配列のメリット、実践的な使い方について説明します。
という訳で今日はこのへんで。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今、産技高専ロボカップ部では、とある超音波センサーがよく話題にでてきます。
こういうセンサーなのですが、とてもちっさいんです。

これで大体100円玉と同じくらいの大きさです。
通常超音波センサーは音波を送信する側と受信する側の2つがついていますよね。
でもこのセンサーは1つしかセンサーらしきものがついていません。
これはどういうことかといいますと、これはこの1つの目だけで送信と受信の両方を行なっているのです。
このセンサーの場合、下の基盤にPICにが搭載されていて、それによって送信と受信を切り替えているようです。
どうしてこういう事ができるかといいますと、
実は超音波センサー・・・というより音波系のセンサーは送信機と受信機は全く同じものなのです。
電気を流すと振動して音が出るのが送信機、音の振動で電気を流すのが受信機というわけです。
要するにマイクとスピーカーは中の仕組みは全く同じということです。
スピーカー端子にマイクをつなぐと音は出るし、マイク端子にスピーカーをつけても音は拾うんです。
まぁ一般に売られるマイクとスピーカーは一方向のみの性能が強化されているわけですが。
それを利用して作られているのがこの超音波センサーというわけです。
また、出力形態はアナログとパルス、あとURATというシリアル通信に対応しています。
このように出力形態もアナログで簡単に読めるということで凄く便利なので
今日買って来ました(笑)

型番はLV-MaxSonarというそうです。とりあえずオススメと言われたのでEZ-1という種類のものを買って来ました。
小さいけど、ちゃんとネジ穴が付いているので取り付けには困らなそうですね。
只、端子がなく、ピンでの接続なので結局下に何かしらの基盤的なものが付きそうな予感がしています。
まぁせっかく買ったので今度試してみようと思います。
それでは今日はこのへんで。
(^・ω・)ノ RadiumProduction in RoboCup Junior
こういうセンサーなのですが、とてもちっさいんです。
これで大体100円玉と同じくらいの大きさです。
通常超音波センサーは音波を送信する側と受信する側の2つがついていますよね。
でもこのセンサーは1つしかセンサーらしきものがついていません。
これはどういうことかといいますと、これはこの1つの目だけで送信と受信の両方を行なっているのです。
このセンサーの場合、下の基盤にPICにが搭載されていて、それによって送信と受信を切り替えているようです。
どうしてこういう事ができるかといいますと、
実は超音波センサー・・・というより音波系のセンサーは送信機と受信機は全く同じものなのです。
電気を流すと振動して音が出るのが送信機、音の振動で電気を流すのが受信機というわけです。
要するにマイクとスピーカーは中の仕組みは全く同じということです。
スピーカー端子にマイクをつなぐと音は出るし、マイク端子にスピーカーをつけても音は拾うんです。
まぁ一般に売られるマイクとスピーカーは一方向のみの性能が強化されているわけですが。
それを利用して作られているのがこの超音波センサーというわけです。
また、出力形態はアナログとパルス、あとURATというシリアル通信に対応しています。
このように出力形態もアナログで簡単に読めるということで凄く便利なので
今日買って来ました(笑)
型番はLV-MaxSonarというそうです。とりあえずオススメと言われたのでEZ-1という種類のものを買って来ました。
小さいけど、ちゃんとネジ穴が付いているので取り付けには困らなそうですね。
只、端子がなく、ピンでの接続なので結局下に何かしらの基盤的なものが付きそうな予感がしています。
まぁせっかく買ったので今度試してみようと思います。
それでは今日はこのへんで。
(^・ω・)ノ RadiumProduction in RoboCup Junior
使っているPICは16F1939。新しいシリーズの16FのPICです。
とりあえずコイツを2台乗せで行ってみようと思います。
今こんな感じになっていますね。PIC以外殆ど何もありませんが、この基盤はこれで殆ど完成しました。
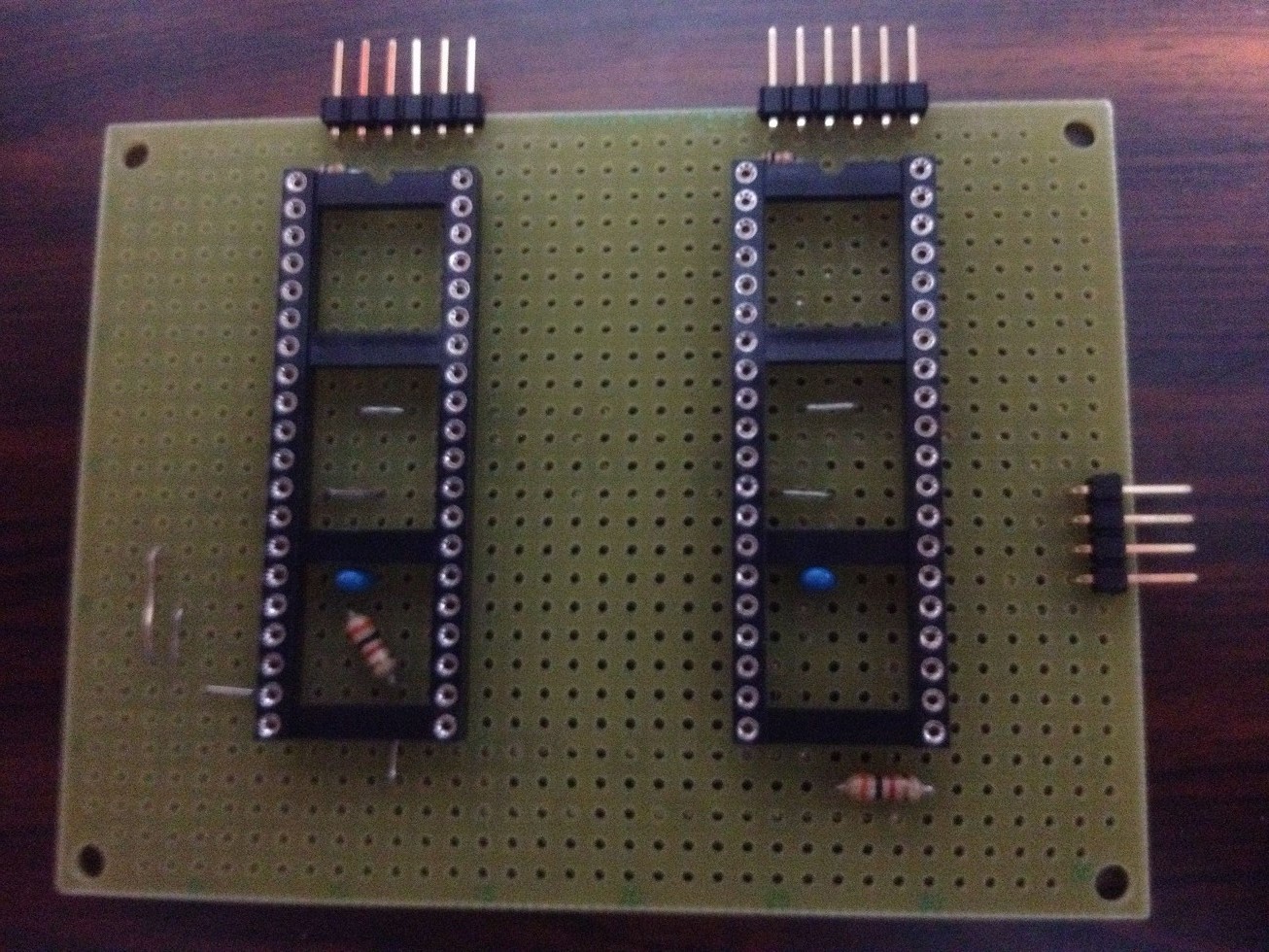
まぁメイン基盤にこれ以上載せるものも、載せる場所もありませんけど・・・。
このソケットにPICを2つのっけてI2Cで相互通信をする予定です。
本当はI2Cなんて使う予定はなかったのですが、何故かこんなことに。
SPIでさくさくーっとやる予定が、SPI用のピンとI2C用のピンがブッキングしてしまっていたので仕方なく・・・。
しかも使いたいセンサーのbpsがものによって違うので、いちいち変更しなくてはいけないという面倒くささも問題です。
思ったより事故な仕様になりそうな予感がバリバリですが、まぁいつもなんとかなっているので今回もなんとかなるでしょう。
後はこの基盤はコア用のコンデンサを付けるのと、端子を接続するだけで完成です。
そして最後にセンサー基盤を上につけて・・・回路は完成です!
それにしてもこの回路群。作ったはいいけど一体何に使おう・・・。
(^・ω・)ノ RadiumProduction in RoboCup Junior
とりあえずコイツを2台乗せで行ってみようと思います。
今こんな感じになっていますね。PIC以外殆ど何もありませんが、この基盤はこれで殆ど完成しました。
まぁメイン基盤にこれ以上載せるものも、載せる場所もありませんけど・・・。
このソケットにPICを2つのっけてI2Cで相互通信をする予定です。
本当はI2Cなんて使う予定はなかったのですが、何故かこんなことに。
SPIでさくさくーっとやる予定が、SPI用のピンとI2C用のピンがブッキングしてしまっていたので仕方なく・・・。
しかも使いたいセンサーのbpsがものによって違うので、いちいち変更しなくてはいけないという面倒くささも問題です。
思ったより事故な仕様になりそうな予感がバリバリですが、まぁいつもなんとかなっているので今回もなんとかなるでしょう。
後はこの基盤はコア用のコンデンサを付けるのと、端子を接続するだけで完成です。
そして最後にセンサー基盤を上につけて・・・回路は完成です!
それにしてもこの回路群。作ったはいいけど一体何に使おう・・・。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今度は知らないうちにGoogleChromeが18になっているようです。
だいぶプラグインクラッシュはなくなったようですが、それでも我が家のChromeはだいぶ酷い・・・。
今日は久々に動画の紹介でも行います。
今日は歩行するロボットについてのものを2つほど紹介します。
まずは此方。前にTvでも話題になったと思うのですが、高速で四足歩行をするロボットです。
Cheetah(チーター)というロボットで、
あの蹴飛ばされてもバランスの崩れない四足歩行で有名なBigDogを開発した会社の発明です。
チーターというだけあって時速100キロで・・・
とは行きませんが、時速18マイル・・・だいたい時速30キロ程度での四足走行が可能とのことです。
程度といっても、正直信じられない速さです。でもこれどうやって曲がるんだろう・・・?
四足をまがいなりにも作ったことのある人間ですから言えますけど、人の歩く速さにすることすら相当なことなのですが・・・
因みに此方がBigDog。皆さん一度はどこかでご覧になったころがあるのではないでしょうか?
次は全く違った指向の歩行ロボットの紹介です。
「アリのような昆虫」をモチーフにしたと書かれている此方のロボット。正直アリにはとても見えませんけど・・・
どっちかっていうと・・・ダンゴムシ?
六足歩行からボール状へトランスフォームする、世にも奇妙なロボットです。
平地ではコロコロ転がって高速移動、荒地では足を出して確実に・・・ということなのでしょうか。
僕が一番気になるのは、ボールの状態でどのくらい方向の制御が効くのかということなのですけど・・・。
でもいきなりあんなトランスフォームされたら見ている人は驚きますよね。
因みにこのロボットはサーボを使った気合制御で動いているようです。
この手のロボットって最初の動かす制御が大変なんですよね。
でもその代わり、こういうロボットって自己学習プログラムを入れてあげると面白い方法で歩行してくれるので
個人的には一度作ってみたいですね。でもサーボが高い・・・
という訳で今日の記事はこのへんで。
(^・ω・)ノ RadiumProduction in RoboCup Junior
だいぶプラグインクラッシュはなくなったようですが、それでも我が家のChromeはだいぶ酷い・・・。
今日は久々に動画の紹介でも行います。
今日は歩行するロボットについてのものを2つほど紹介します。
まずは此方。前にTvでも話題になったと思うのですが、高速で四足歩行をするロボットです。
Cheetah(チーター)というロボットで、
あの蹴飛ばされてもバランスの崩れない四足歩行で有名なBigDogを開発した会社の発明です。
チーターというだけあって時速100キロで・・・
とは行きませんが、時速18マイル・・・だいたい時速30キロ程度での四足走行が可能とのことです。
程度といっても、正直信じられない速さです。でもこれどうやって曲がるんだろう・・・?
四足をまがいなりにも作ったことのある人間ですから言えますけど、人の歩く速さにすることすら相当なことなのですが・・・
因みに此方がBigDog。皆さん一度はどこかでご覧になったころがあるのではないでしょうか?
次は全く違った指向の歩行ロボットの紹介です。
「アリのような昆虫」をモチーフにしたと書かれている此方のロボット。正直アリにはとても見えませんけど・・・
どっちかっていうと・・・ダンゴムシ?
六足歩行からボール状へトランスフォームする、世にも奇妙なロボットです。
平地ではコロコロ転がって高速移動、荒地では足を出して確実に・・・ということなのでしょうか。
僕が一番気になるのは、ボールの状態でどのくらい方向の制御が効くのかということなのですけど・・・。
でもいきなりあんなトランスフォームされたら見ている人は驚きますよね。
因みにこのロボットはサーボを使った気合制御で動いているようです。
この手のロボットって最初の動かす制御が大変なんですよね。
でもその代わり、こういうロボットって自己学習プログラムを入れてあげると面白い方法で歩行してくれるので
個人的には一度作ってみたいですね。でもサーボが高い・・・
という訳で今日の記事はこのへんで。
(^・ω・)ノ RadiumProduction in RoboCup Junior
どうやら今年も存在するかどうかも怪しいと噂される日本エイプリルフール協会が
今年のエイプリルフール優秀賞を発表した模様です。
これはネット内でのアンケートによって決定されるもので、
その年のエイプリルフールで一番凄かっただとか騙されたと思ったものを投票していくものです。
らじぷろは今年は真面目に順位報告をやっちゃったので、嘘はかけなかったんですけど・・・
世間では今年もかなりの暴走が目立った模様です。
さて、今年の優勝者は・・・
Googleです!
内容は・・・
GoogleMAP ドラクエ風に8ビット化です。
要するにGoogleMAPがNES(ファミコン)のすフトウェアとしてリリースされ、
しかも既存のGoogleMAPも全てドラクエ化するというものです。
ドラクエの生みの親であるスクウェア・エニックスの協力(というより共犯?)の上というから凄まじく気合が入っていますね。
これは動画もUPされていて、既に400万回以上のアクセスが。
流石としか言えませんよね。マップを瞬時に8ビット化って何・・・(笑)
因みに2位もGoogleです。2位は「モールスバージョン」という日本語入力をスペースキーのみを行えるサービスです。
要するにモールスのタイミング通りにスペースキーを入力すると日本語に変換してくれるという
なんとも電気通信部得なサービスです。
勿論実際にPCにインストールはできませんが、体験版はあるようなので一度試してみてはいかがでしょうか。
それにしてもこれ、どうやって漢字を変換しているのでしょうね。
因みにあの機械は隣の部室にあるので、うちの部ではスペースキーは使わないだろうなぁ・・・。
体験版
という訳で今日は今年のエイプリルフール優秀賞の話でした。それでは今日はこのへんで
結果
(^・ω・)ノ RadiumProduction in RoboCup Junior
今年のエイプリルフール優秀賞を発表した模様です。
これはネット内でのアンケートによって決定されるもので、
その年のエイプリルフールで一番凄かっただとか騙されたと思ったものを投票していくものです。
らじぷろは今年は真面目に順位報告をやっちゃったので、嘘はかけなかったんですけど・・・
世間では今年もかなりの暴走が目立った模様です。
さて、今年の優勝者は・・・
Googleです!
内容は・・・
GoogleMAP ドラクエ風に8ビット化です。
要するにGoogleMAPがNES(ファミコン)のすフトウェアとしてリリースされ、
しかも既存のGoogleMAPも全てドラクエ化するというものです。
ドラクエの生みの親であるスクウェア・エニックスの協力(というより共犯?)の上というから凄まじく気合が入っていますね。
これは動画もUPされていて、既に400万回以上のアクセスが。
流石としか言えませんよね。マップを瞬時に8ビット化って何・・・(笑)
因みに2位もGoogleです。2位は「モールスバージョン」という日本語入力をスペースキーのみを行えるサービスです。
要するにモールスのタイミング通りにスペースキーを入力すると日本語に変換してくれるという
なんとも電気通信部得なサービスです。
勿論実際にPCにインストールはできませんが、体験版はあるようなので一度試してみてはいかがでしょうか。
それにしてもこれ、どうやって漢字を変換しているのでしょうね。
因みにあの機械は隣の部室にあるので、うちの部ではスペースキーは使わないだろうなぁ・・・。
体験版
という訳で今日は今年のエイプリルフール優秀賞の話でした。それでは今日はこのへんで
結果
(^・ω・)ノ RadiumProduction in RoboCup Junior
実は2013年度への活動ができる時間って今のところ、
新学期が始まるまでの僅かな時間に限られてしまっているんです。
という訳で活動中なのですが、
とりあえず方針としてはLα+は解散になります。また相方を探さないといけないんです。
そしてその相方は来年も恐らく新しい一年生になります。
まぁ理由は新2年生、つまり今までの一年生は全て売れてしまっているからです。要するに部員がいない(笑)
それでもって来年部員が来なかったら・・・相方なし。活動不可ということになってしまいます。
そして来年は時間もあまりありません。
一応この何日かで新しいロボットの構想は大体まとまったのですが、実際にモノを作る時間があるかどうか・・・
来年は遊び目的の事故機を作るチームが多そうなので、どっか一つまともなチームがほしいのですけど・・・。
とりあえず来年はセンサーの数が更に多くなるという方向性だけは出て来ました。
倍・・・とまでは行かないでしょうけどそれでも相当な数を搭載することになるかと思われます。
そんな壮大な構想があるせいで、時間が足りないって自体になっている訳なのですが。
まぁ出れなかったらその時はその時。誰か後輩にでも投げちゃえばいい話ですからね←
でも、今一番しなきゃいけないことは来年度の体制作り、部員の確保、そして部室の確保です。
今年度は全て白紙の状態を通りこしてマイナスからのスタートになっています。
とりあえず顧問の先生を見つけるところから始めないといけないのですが、4月になってから一度も会えない・・・
しかも今日はこの天気ですからもう災難です。
こんな残念な始まり方で大丈夫なのかなぁ。
ちょっと不安が残る産技ロボカップの2012年度の始まりでした。始まってないよね・・・?
(^・ω・)ノ RadiumProduction in RoboCup Junior
新学期が始まるまでの僅かな時間に限られてしまっているんです。
という訳で活動中なのですが、
とりあえず方針としてはLα+は解散になります。また相方を探さないといけないんです。
そしてその相方は来年も恐らく新しい一年生になります。
まぁ理由は新2年生、つまり今までの一年生は全て売れてしまっているからです。要するに部員がいない(笑)
それでもって来年部員が来なかったら・・・相方なし。活動不可ということになってしまいます。
そして来年は時間もあまりありません。
一応この何日かで新しいロボットの構想は大体まとまったのですが、実際にモノを作る時間があるかどうか・・・
来年は遊び目的の事故機を作るチームが多そうなので、どっか一つまともなチームがほしいのですけど・・・。
とりあえず来年はセンサーの数が更に多くなるという方向性だけは出て来ました。
倍・・・とまでは行かないでしょうけどそれでも相当な数を搭載することになるかと思われます。
そんな壮大な構想があるせいで、時間が足りないって自体になっている訳なのですが。
まぁ出れなかったらその時はその時。誰か後輩にでも投げちゃえばいい話ですからね←
でも、今一番しなきゃいけないことは来年度の体制作り、部員の確保、そして部室の確保です。
今年度は全て白紙の状態を通りこしてマイナスからのスタートになっています。
とりあえず顧問の先生を見つけるところから始めないといけないのですが、4月になってから一度も会えない・・・
しかも今日はこの天気ですからもう災難です。
こんな残念な始まり方で大丈夫なのかなぁ。
ちょっと不安が残る産技ロボカップの2012年度の始まりでした。始まってないよね・・・?
(^・ω・)ノ RadiumProduction in RoboCup Junior
3月分のアクセス解析が出たので紹介します。まずはワードのランキングから。
今月はジャパンオープンがあったからか、ロボカップが圧倒的です。
ジャパンオープン期間中は見る人がみんな外出していましたからアクセス少ないですけど・・・
そして次点はなんとPIC。遂にNXTを抜かしてしまいました。
そしてNXTが3位に下落、4位は何故か常連のコンデンサ、そして5位が何故かレスキューです。
PIC関連の記事を増やしたような記憶はあまりないのですが、ここにきて急激に伸びましたね。
というか3月は・・・やけにアクセスが多いような・・・。
ワードランキングの統計を取り始めてからだと、ワードの総数が過去最高だったりします。謎アクセスが集中した夏休みより多い!
これは春休み効果ということでいいのでしょうか・・・。なにはともかく、アクセスありがとうございます。
因みに・・・ちょっと気になったのが今回の予備調査。
今回は検索フレーズ。
つまりアクセスした人がどんなフレーズを検索エンジンに入力してここにやってきたかを知るものなのですが・・・
今回、何故か「ロボカップジュニア」と「ロボカップ」という1単語でのアクセスが異様に多いんです。
なんと、全体の5%以上がそのどちらかという状態です。一体何があったんでしょう。
あまりに引っかかる気がしなかったので、自分でも検索かけてみましたが、20ページ見ても引っかかりません。
恐らく一時的なアレだったのでしょうが、いったい何時、どんなタイミングでそんな事故が起こってしまったのでしょうね・・・。
因みに普段必ずと言っていいほど存在しているフレーズは
radiumproductionとか、新型PICの型番とか、KXP84-2050という加速度センサーについてのものですね。
加速度センサーは紹介しただけなんだけどなぁ・・・フレーズでは毎月上位に食い込んでいる気がします。
因みにこのセンサーは今度また使ってみようかとも思っているので、この先何か書くかもしれません。
そんな感じで3月のアクセス解析は以上です。
本年度の大会は終了致しましたが、普通にこっちの方の更新は」続いていきますので今度とも宜しくお願い致します。
まぁジャパンの後記については・・・色々ありすぎたので逆に書けないかもですけど。
それではまた明日。
(^・ω・)ノ RadiumProduction in RoboCup Junior
| 順位 | ワード | 数 |
| 1 | ロボカップ、ロボカップジュニア | 80 |
| 2 | PIC | 59 |
| 3 | NXT,nxt | 39 |
| 4 | コンデンサ | 12 |
| 5 | レスキュー | 11 |
今月はジャパンオープンがあったからか、ロボカップが圧倒的です。
ジャパンオープン期間中は見る人がみんな外出していましたからアクセス少ないですけど・・・
そして次点はなんとPIC。遂にNXTを抜かしてしまいました。
そしてNXTが3位に下落、4位は何故か常連のコンデンサ、そして5位が何故かレスキューです。
PIC関連の記事を増やしたような記憶はあまりないのですが、ここにきて急激に伸びましたね。
というか3月は・・・やけにアクセスが多いような・・・。
ワードランキングの統計を取り始めてからだと、ワードの総数が過去最高だったりします。謎アクセスが集中した夏休みより多い!
これは春休み効果ということでいいのでしょうか・・・。なにはともかく、アクセスありがとうございます。
因みに・・・ちょっと気になったのが今回の予備調査。
今回は検索フレーズ。
つまりアクセスした人がどんなフレーズを検索エンジンに入力してここにやってきたかを知るものなのですが・・・
今回、何故か「ロボカップジュニア」と「ロボカップ」という1単語でのアクセスが異様に多いんです。
なんと、全体の5%以上がそのどちらかという状態です。一体何があったんでしょう。
あまりに引っかかる気がしなかったので、自分でも検索かけてみましたが、20ページ見ても引っかかりません。
恐らく一時的なアレだったのでしょうが、いったい何時、どんなタイミングでそんな事故が起こってしまったのでしょうね・・・。
因みに普段必ずと言っていいほど存在しているフレーズは
radiumproductionとか、新型PICの型番とか、KXP84-2050という加速度センサーについてのものですね。
加速度センサーは紹介しただけなんだけどなぁ・・・フレーズでは毎月上位に食い込んでいる気がします。
因みにこのセンサーは今度また使ってみようかとも思っているので、この先何か書くかもしれません。
そんな感じで3月のアクセス解析は以上です。
本年度の大会は終了致しましたが、普通にこっちの方の更新は」続いていきますので今度とも宜しくお願い致します。
まぁジャパンの後記については・・・色々ありすぎたので逆に書けないかもですけど。
それではまた明日。
(^・ω・)ノ RadiumProduction in RoboCup Junior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ