RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
今日はこのブログの背景の画像の話でもしましょうか。
このブログの背景の画像。まぁロボットの写真なのですが。
このロボット、よく「このロボット絶対レスキューする気ないな・・・」と言われます。
2008~2010に使用した僕のロボットです。
左側に搭載されているLEDつきガトリングの力で今迄数々の被災者を救出してきました。

因みにこのガトリングはマイクロモーター搭載で被災者発見時に回転して光ります。
このロボットはLEGO、RCXをコアにしています。RCXと言うのは以前お話ししたNXTの前世機で、
外部の入出力を3ずつ搭載し、H8マイコンをベースにしたキットです。
このロボットの特徴と言いますと、そのRCXをメインにし、サブでひとつ基板が搭載されています。
この写真ではどこにあるかが確認できませんが、実はロボットの右側、ガトリングの反対側にあります。

このサブ基板にはPIC16F873Aが搭載されており、
これだけで左右にある赤外線測距センサーと3ビット方位センサー、
2個の水銀センサーと緑被災者検出センサーの
合計6個のセンサーを制御し、そのデータをRCXのBポート信号に合わせてRCXのポート2に送信することで
事実上RCXの1つのポートで6つのセンサーの制御ができるようになっています。
また、此処で使用しているものは全てデジタルの信号なので、別途でアナログの信号の入力も行えます。
これはタッチセンサーとライトセンサーの重ねづけの原理と同じですね。
ここではアナログセンサーとしてライトセンサーを利用しているので
実質ポート2で読み込んでいるセンサーは7つとなります。
しかし、この仕組みは完成こそしているものの、本大会では一回も使用されることはありませんでした(笑)
何故かというと、この基板ができた年、2010年度の大会では
電源トラブルによって関東ブロックで敗退してしまっています。
それでそのままNXTに切り替えたのでこれからも使われることは無い・・・と。
まぁそんなロボットなので今も09ルール仕様のまま家に放置です。
年末に久しぶりに動かしたらちゃんとライントレースをして凄く驚いたって状態ですね。
今度これで2011ルール対応作ってみるかな(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
このブログの背景の画像。まぁロボットの写真なのですが。
このロボット、よく「このロボット絶対レスキューする気ないな・・・」と言われます。
2008~2010に使用した僕のロボットです。
左側に搭載されているLEDつきガトリングの力で今迄数々の被災者を救出してきました。
因みにこのガトリングはマイクロモーター搭載で被災者発見時に回転して光ります。
このロボットはLEGO、RCXをコアにしています。RCXと言うのは以前お話ししたNXTの前世機で、
外部の入出力を3ずつ搭載し、H8マイコンをベースにしたキットです。
このロボットの特徴と言いますと、そのRCXをメインにし、サブでひとつ基板が搭載されています。
この写真ではどこにあるかが確認できませんが、実はロボットの右側、ガトリングの反対側にあります。
このサブ基板にはPIC16F873Aが搭載されており、
これだけで左右にある赤外線測距センサーと3ビット方位センサー、
2個の水銀センサーと緑被災者検出センサーの
合計6個のセンサーを制御し、そのデータをRCXのBポート信号に合わせてRCXのポート2に送信することで
事実上RCXの1つのポートで6つのセンサーの制御ができるようになっています。
また、此処で使用しているものは全てデジタルの信号なので、別途でアナログの信号の入力も行えます。
これはタッチセンサーとライトセンサーの重ねづけの原理と同じですね。
ここではアナログセンサーとしてライトセンサーを利用しているので
実質ポート2で読み込んでいるセンサーは7つとなります。
しかし、この仕組みは完成こそしているものの、本大会では一回も使用されることはありませんでした(笑)
何故かというと、この基板ができた年、2010年度の大会では
電源トラブルによって関東ブロックで敗退してしまっています。
それでそのままNXTに切り替えたのでこれからも使われることは無い・・・と。
まぁそんなロボットなので今も09ルール仕様のまま家に放置です。
年末に久しぶりに動かしたらちゃんとライントレースをして凄く驚いたって状態ですね。
今度これで2011ルール対応作ってみるかな(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
実はまだきちんとテンプレが完成してなくて色々変わる気がします。特にカーソルとか。
一昨日ようやくロボットができてプログラムを入れてライントレースをさせてみたら、
直角で回転時に壁が尻尾に壁に尻尾が激突して終わりました。また作り直しですね。
その後、ロボコン部の簡易のミーティングに参加して、その後また部屋に帰って絶望。
まだロボットができるのは先の話となりそうです。
そんな今日は今迄の話とは全く関係なく、NXT本体についてです。
NXTとは・・・
これですね。

本体名称はNなんたらXなんたらTなんたらの略です。
・・・スイマセン。今度調べときます。
そもそも略語かすらわからないし(汗
こんなNXTですが、RCXと同じように単3電池6本、つまり9Vで動作します。
また、充電池にすることもでき、その場合は少し本体が大きくなりますが、
電池BOXに入れたまま充電ができるので便利です。
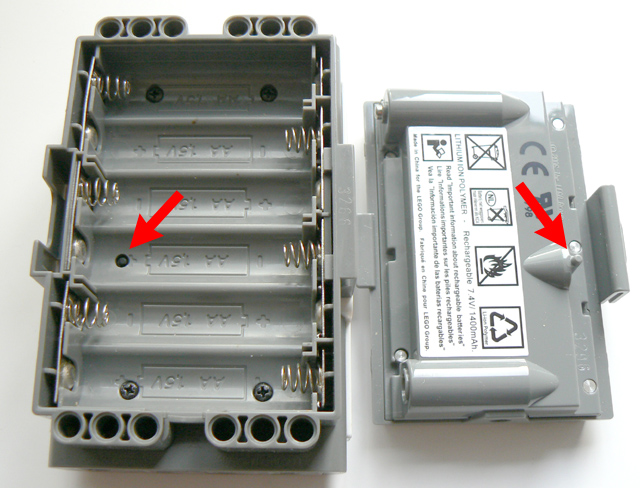
低格は上の写真からもわかりますが、7.4Vの1400A/hのリチウムイオンポリマー電池です。
よく「リポ」って呼ばれてるアレです。ショートさせると爆発します。
この電池は空にさえしなければ継ぎ足し充電が自在に行えて、携帯電話等の小型端末によく使われますが、
とても熱に弱いです。発熱したり、温度の高いところにおいておくと寿命が減ります。
古かったり、しょぼい電池とかだと充電時に発熱するので、
充電すると寿命が縮むという意味不明な仕様がありました。最近のやつは大丈夫っぽいけど。
因みにNXTの充電池は発熱する部類に入ります。
あと充電池はセット同梱、充電器は別売りとなっております。意味不明です。
7.4Vの1400mAってNXTにはちょっと弱すぎる気もしなくも無いけど、これで動作上は問題ないです。
中に入ってるCPUはARM7というマイコンです。
このマイコン、どういうところに使われているかというと、結構凄いんですよ。
例えば、ちょっと前の携帯電話、デジタルカメラ、車のカーナビ等の周辺機器制御、
あとは最近話題(?)のルンバやみんな大好きI podシリーズ、
ゲームボーアドバンスやソフトのメインCPU、DSシリーズのサブCPUなどがそうですね。
結構身近にいるんですよ。このマイコン。
僕もこのマイコンはマンコンとして持っていて、制御して遊んだりしていますが・・・・
どう考えてもNXTには勿体無いですね。
PICやAVR、RCXに内蔵されているH8とかとは問題にならないくらい別次元にいるマイコンです。
もちろん32bitですが、動作クロックは48MHzと少々少なめですね。
まぁこれでもARMファミリーの中では最低クラスの一個上程度のシリーズなのですから驚きですね。
因みにサブでAtmel AVRが使用されています。
こんなNXTは外部出力ポートが3、外部入力ポートが4存在します。
ここから各種センサー、モーターを接続するわけですが、
そのポートのケーブルはRCXの3倍の6芯となっています。
これは、入力の場合はアナログ用電源、アナログ入力、回路電源、GND、入力信号A、入力信号Bの6本、
出力の場合はPWM1、PWM2、エンコーダー電源、GND、入力信号A、入力信号Bの6本となっています。
入力のアナログ用電源、アナログ入力はRCXのセンサーポートの2芯の中身と同じです。
RCX変換ケーブルはこの2本のみを使用しています。
回路電源、GND、は電源とGNDが必要センサー用のものです。回路電源は4.3~4.8V程が出力されます。
入力信号A、入力信号Bはセンサーとの通信用の信号となります。
ここではI2C、RS485という通信規格をサポートしています。でもRS485って要するにD-sub25ですよね。
一体実装してどうするつもりなのでしょう。
I2Cというのは・・・説明するまでも無いとは思いますが、フィリップス社が提唱したシリアル通信方式で
「Inter-Integrated Circuit」の略語です。
この方式は・・・仕組みについての説明を実際にしても難しい言葉の羅列になるので簡単に。
いつも僕が小学生に説明している方法で説明すると、
まず通信線(2本で1セット)があって、
それでデータで受け取る側(NXT)と、データを送る側(センサー)が繋がれています。
そしてこの状態でセンサーはNXTにデータを送っているのですが、
センサー側は同じ線に複数台あっても大丈夫なようになっています。
どのようになっているかというと、
例えばNXTのポート1にI2C対応の超音波センサー、コンパスセンサー、加速度センサーが繫がれた場合、
まずNXTはどのセンサーのデータが欲しいかというデータを全てのセンサーに送ります。
その後、センサー側は「データが欲しい」といわれたセンサーのみが返事をします。
そして、NXTが「データを送るときの設定(加速度センサーであればどの方向の加速度か、等)」を送り、
それをセンサーは受けとり、さっき返事をしたセンサーのみがデータをNXTに送る。
という風になっており、同時に複数のセンサーのデータを送るのではなく、
繫がれた中でNXT側が指定したセンサーのみがデータを送る。というものです。
因みにこれで1ポートにつき112個までのセンサーが接続できます。
これが4ポートあるので4×112で448個、
これにそれぞれのポートにアナログが4つなので4足して、
結果NXTは452個のセンサーが制御できることになります。
また、実際はマルチマスタといって受け取る側のNXTが複数台いても成り立つのですが、NXTのI2C機能は
本物ではなく、ソフトウェアで作られた擬似的なものなのでNXTでできるかはワカリマセン(笑)。
モーターの方はと云うと2本のPWMというのはモーターに送る制御信号で、
エンコーダー電源、GNDは内部の回転センサーの電源です。
入力信号A、入力信号Bというのは回転センサーのデータの入力信号で、これもPWM波形です。
この部分だけ切り取ってセンサーに使っちゃえ!などと考える人もいたかと思いますが(ここにいた)、
残念ながらアナログ信号ではないので、非常にめんどいことになります。まだI2Cの方が楽か・・・。
また、これらの入出力の端子はRJ12という電話線の端子を使用しています。
あとPCとの通信手段としてUSB2.0、他デバイスとの通信用にBluetoothが内蔵されています。
まだまだかけることいっぱいありますが永くなるのでこの辺で今日はお開きです。
書く気になったら続き書きます(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
一昨日ようやくロボットができてプログラムを入れてライントレースをさせてみたら、
直角で回転時に壁が尻尾に壁に尻尾が激突して終わりました。また作り直しですね。
その後、ロボコン部の簡易のミーティングに参加して、その後また部屋に帰って絶望。
まだロボットができるのは先の話となりそうです。
そんな今日は今迄の話とは全く関係なく、NXT本体についてです。
NXTとは・・・
これですね。
本体名称はNなんたらXなんたらTなんたらの略です。
・・・スイマセン。今度調べときます。
そもそも略語かすらわからないし(汗
こんなNXTですが、RCXと同じように単3電池6本、つまり9Vで動作します。
また、充電池にすることもでき、その場合は少し本体が大きくなりますが、
電池BOXに入れたまま充電ができるので便利です。
低格は上の写真からもわかりますが、7.4Vの1400A/hのリチウムイオンポリマー電池です。
よく「リポ」って呼ばれてるアレです。ショートさせると爆発します。
この電池は空にさえしなければ継ぎ足し充電が自在に行えて、携帯電話等の小型端末によく使われますが、
とても熱に弱いです。発熱したり、温度の高いところにおいておくと寿命が減ります。
古かったり、しょぼい電池とかだと充電時に発熱するので、
充電すると寿命が縮むという意味不明な仕様がありました。最近のやつは大丈夫っぽいけど。
因みにNXTの充電池は発熱する部類に入ります。
あと充電池はセット同梱、充電器は別売りとなっております。意味不明です。
7.4Vの1400mAってNXTにはちょっと弱すぎる気もしなくも無いけど、これで動作上は問題ないです。
中に入ってるCPUはARM7というマイコンです。
このマイコン、どういうところに使われているかというと、結構凄いんですよ。
例えば、ちょっと前の携帯電話、デジタルカメラ、車のカーナビ等の周辺機器制御、
あとは最近話題(?)のルンバやみんな大好きI podシリーズ、
ゲームボーアドバンスやソフトのメインCPU、DSシリーズのサブCPUなどがそうですね。
結構身近にいるんですよ。このマイコン。
僕もこのマイコンはマンコンとして持っていて、制御して遊んだりしていますが・・・・
どう考えてもNXTには勿体無いですね。
PICやAVR、RCXに内蔵されているH8とかとは問題にならないくらい別次元にいるマイコンです。
もちろん32bitですが、動作クロックは48MHzと少々少なめですね。
まぁこれでもARMファミリーの中では最低クラスの一個上程度のシリーズなのですから驚きですね。
因みにサブでAtmel AVRが使用されています。
こんなNXTは外部出力ポートが3、外部入力ポートが4存在します。
ここから各種センサー、モーターを接続するわけですが、
そのポートのケーブルはRCXの3倍の6芯となっています。
これは、入力の場合はアナログ用電源、アナログ入力、回路電源、GND、入力信号A、入力信号Bの6本、
出力の場合はPWM1、PWM2、エンコーダー電源、GND、入力信号A、入力信号Bの6本となっています。
入力のアナログ用電源、アナログ入力はRCXのセンサーポートの2芯の中身と同じです。
RCX変換ケーブルはこの2本のみを使用しています。
回路電源、GND、は電源とGNDが必要センサー用のものです。回路電源は4.3~4.8V程が出力されます。
入力信号A、入力信号Bはセンサーとの通信用の信号となります。
ここではI2C、RS485という通信規格をサポートしています。でもRS485って要するにD-sub25ですよね。
一体実装してどうするつもりなのでしょう。
I2Cというのは・・・説明するまでも無いとは思いますが、フィリップス社が提唱したシリアル通信方式で
「Inter-Integrated Circuit」の略語です。
この方式は・・・仕組みについての説明を実際にしても難しい言葉の羅列になるので簡単に。
いつも僕が小学生に説明している方法で説明すると、
まず通信線(2本で1セット)があって、
それでデータで受け取る側(NXT)と、データを送る側(センサー)が繋がれています。
そしてこの状態でセンサーはNXTにデータを送っているのですが、
センサー側は同じ線に複数台あっても大丈夫なようになっています。
どのようになっているかというと、
例えばNXTのポート1にI2C対応の超音波センサー、コンパスセンサー、加速度センサーが繫がれた場合、
まずNXTはどのセンサーのデータが欲しいかというデータを全てのセンサーに送ります。
その後、センサー側は「データが欲しい」といわれたセンサーのみが返事をします。
そして、NXTが「データを送るときの設定(加速度センサーであればどの方向の加速度か、等)」を送り、
それをセンサーは受けとり、さっき返事をしたセンサーのみがデータをNXTに送る。
という風になっており、同時に複数のセンサーのデータを送るのではなく、
繫がれた中でNXT側が指定したセンサーのみがデータを送る。というものです。
因みにこれで1ポートにつき112個までのセンサーが接続できます。
これが4ポートあるので4×112で448個、
これにそれぞれのポートにアナログが4つなので4足して、
結果NXTは452個のセンサーが制御できることになります。
また、実際はマルチマスタといって受け取る側のNXTが複数台いても成り立つのですが、NXTのI2C機能は
本物ではなく、ソフトウェアで作られた擬似的なものなのでNXTでできるかはワカリマセン(笑)。
モーターの方はと云うと2本のPWMというのはモーターに送る制御信号で、
エンコーダー電源、GNDは内部の回転センサーの電源です。
入力信号A、入力信号Bというのは回転センサーのデータの入力信号で、これもPWM波形です。
この部分だけ切り取ってセンサーに使っちゃえ!などと考える人もいたかと思いますが(ここにいた)、
残念ながらアナログ信号ではないので、非常にめんどいことになります。まだI2Cの方が楽か・・・。
また、これらの入出力の端子はRJ12という電話線の端子を使用しています。
あとPCとの通信手段としてUSB2.0、他デバイスとの通信用にBluetoothが内蔵されています。
まだまだかけることいっぱいありますが永くなるのでこの辺で今日はお開きです。
書く気になったら続き書きます(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
作る気があるんだか無いんだか。
正月に入ってから、ロボット本体を4回程作っては壊すの繰り返しです。
全く形を固定する気が見られません。本当にあと2ヶ月で間に合うんでしょうか。
今日はセンサーの話です。
といっても難しいセンサーの話は一切しないつもりです。
難しい話をしようとすると、NXTのI2C規格は実はソフトウェア上で作ってる擬似的なもので、
実際のI2Cではできないような通信も可能なので・・・なんていう辺りから始めかねないからです。
まずロボカップジュニアレスキューにおいてどんなセンサーが有効なのかという話ですね。
このレスキューという競技では、現時点ではライトセンサーというもので
ラインをトレースするのが主流となっているようです。(Bは違うけどね!)
これがライトセンサーというものですが、

ふたつ穴のようなものがありますね。
この穴。片方はLEDというランプのように赤く発光する素子がはいっていて、
繋いでNXTの電源を入れると恐らくひか・・・らないかも。(汗
Viewとかで確認したり、プログラムを実行するとちゃんと光ると思います。
これ、なんで光ってるかというと、ライトセンサーというものは名前の通り、ライト。つまり光。
もっというと光の反射量を測っているセンサーなんです。
床に一定量の光を当てて、床に反射して返ってきた光の量を読んでいるものです。
光というものは白に近い方が多くの量、黒に近いほうが少ない量反射するのでその特性を利用して
ラインの黒と床の白を区別しているのです。
つまりふたつの穴のうちのもうひとつはこの反射してきた光の量を測る受光素子で、
用語としては「フォトトランジスタ」と云うものが利用されています。
僕のロボットも今年はライトセンサーを利用してロボットを作ろうと考えているのですが、
果たして幾つ使うことになるのか・・・
因みに今までは
2005:3個
2006:2個
2007:3個
2008:4個
2009:5個
2010:4個
2011:?
5個とか4個とかは黒歴史ですね。恐らく。
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCup Junior
正月に入ってから、ロボット本体を4回程作っては壊すの繰り返しです。
全く形を固定する気が見られません。本当にあと2ヶ月で間に合うんでしょうか。
今日はセンサーの話です。
といっても難しいセンサーの話は一切しないつもりです。
難しい話をしようとすると、NXTのI2C規格は実はソフトウェア上で作ってる擬似的なもので、
実際のI2Cではできないような通信も可能なので・・・なんていう辺りから始めかねないからです。
まずロボカップジュニアレスキューにおいてどんなセンサーが有効なのかという話ですね。
このレスキューという競技では、現時点ではライトセンサーというもので
ラインをトレースするのが主流となっているようです。(Bは違うけどね!)
これがライトセンサーというものですが、
ふたつ穴のようなものがありますね。
この穴。片方はLEDというランプのように赤く発光する素子がはいっていて、
繋いでNXTの電源を入れると恐らくひか・・・らないかも。(汗
Viewとかで確認したり、プログラムを実行するとちゃんと光ると思います。
これ、なんで光ってるかというと、ライトセンサーというものは名前の通り、ライト。つまり光。
もっというと光の反射量を測っているセンサーなんです。
床に一定量の光を当てて、床に反射して返ってきた光の量を読んでいるものです。
光というものは白に近い方が多くの量、黒に近いほうが少ない量反射するのでその特性を利用して
ラインの黒と床の白を区別しているのです。
つまりふたつの穴のうちのもうひとつはこの反射してきた光の量を測る受光素子で、
用語としては「フォトトランジスタ」と云うものが利用されています。
僕のロボットも今年はライトセンサーを利用してロボットを作ろうと考えているのですが、
果たして幾つ使うことになるのか・・・
因みに今までは
2005:3個
2006:2個
2007:3個
2008:4個
2009:5個
2010:4個
2011:?
5個とか4個とかは黒歴史ですね。恐らく。
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCup Junior
皆さん。ロボカップジュニアでロボットを作るとき、まずは何について考えますか?
直ぐに要所要所の構造を考える人もいれば、大まかな形を直ぐに考える人もいるでしょう。
中には何も考えずに作り始めちゃう方もいるかもしれません。
そんな色んな人たちがいる中で、僕はどうしているか・・・というと。
まずは「なにがしたい」かを明確に考えます。
この「なにがしたい」というのは、どんな風に動かして、何を判断できるロボットを作るのか。
それを考えます。
実はもうこれだけでロボットの形状は殆ど決定してしまいます。
まず、自分の動かしたいように動くロボットを作ろうとすると、重心の位置、サイズが決まってきます。
もうその時点でロボットの大体の外形は決まってきてしまうのです。
そして何を判断するか。ロボットは基本的にセンサーを利用して周りの状況を判断するので、
「何を検知するかを決める」ということは、そのまま「どんなセンサーを使うか」ということなので
使用するセンサーも決まってきてしまいます。
これだけ決まればロボットの形状はほぼ完全に決まってしまいますよね?
。
というわけでまず、「なにがしたい」か、を考えてロボットの形を決めます。
次は「なにで作る」かです。
この「なにで作る」というのはロボットのベースの素材のことです。言い方を変えれば使用するキット?
例えばLEGO

日本のレスキューでは千葉以外の関東圏で一番多くみられる傾向があるようです。
というより他では殆ど見ない?かな?
これはラーニングシステム社が販売している教育用ロボットキットでLEGOブロックで構成されています。
中枢となるコアはLEGOMindStormというブロック。
この中に全ての制御基板と電池が内臓されています。マイコンでいうメインボード的なものでしょうか。
RIS(”ろぼてぃっくすいんべんしょんしすてむ”だったかな)というシステムを採用したロボットキットだったっけ。
この辺は昔僕が書いた論文に全部かいてあるんですが、どこにやったっけなぁ・・・(笑)
今までに大きく分けて4種類のMindStormが販売され、その中の3種類は既に生産を終了しています。
これがその4種類です。
RCX

入出力それそれ3ポートずつあり、外部でセンサー、。モーター等を接続できます。入力は全てアナログです。
PCでプログラムを組み、それを赤外線通信でダウンロードして走ります。ダウンロードが無茶苦茶遅いです。
また、中身はH8マイコンなのですが、何を血迷ったのか事実上のクロック周期が6msという仕様になっています。
なので素早い動きにはセンサーがついていけません。
現在、1.0と1.5と2.0の3種類がありますが、実際どれも大差ありません。何れも生産終了です。
SCOUT

小さいプログラムならPCいらずでプログラムが組めるというブロックです。
しかし、外部入出力ともに2ポートである上に、セットにライトセンサーが含まれてないことからか、
これでロボカップに出場していたロボットは過去に一度しか見たことがありませんね。
PCでのプログラムはRCXのものと同じように組むことができます。内部の仕様は余り変わらないみたい。
赤外線受光機の隣にライトセンサーが内蔵されていますが、レスキューでは果たして使い道があるのか・・・?
サッカー競技では何とか使えそうです。
DROID

ボタンが3つ。とても単純ですね。
これはプログラムは一切組むことができず、7つの内蔵プログラムを選択して実行させることしかできません。
外部入出力もないのでロボカップ競技に使うのは難しいです。というかムリ?
現にこれを使用していたロボットはみたことないですね。。。
NXT

唯一、現在生産が終了していないMindstormがこのNXTです。
事実上のRCXの後継機ですが他のシリーズより10年以上新しいものなので、
他のシリーズには無い様々な機能があります。
まずPCからのプログラムダウンロードが有線になったので格段に速度が上がりました。
次にモーターが大きく、力強くなりました。
RCXのモーターは消費電流が500mAしかなくて、凄く電池が長持ちしたのですがその分パワーが残念でした。
しかし、NXTのモーターは非常に高い消費電力で、
尚且つ内部にギアボックスが組まれているのでRCXと比べると凄いパワーがでます。
しかしその分電池の減りは早いです。
因みにサーボモーターとか書いてありますが実際は擬似サーボです。嘘っぱちです。
次に動作速度、特にセンサーの応答速度が格段に速くなったので、素早い動きにもついていけるようになりました。
そして大きいのが入力ポートです。4つに増えた上に、
そのそれぞれが既存のアナログ入力以外にI2Cの通信規格を採用したので、
事実上アナログ(4)+I2C(4*112)で合計452個のセンサーの制御が可能となっています。
LEGOの説明はこのぐらいでしょう。
他にもLEGOスパイボットというものも存在しますが、あれもレスキュー競技ではあまり使い道がありません。
次はTJ3です。

ダイセン工業株式会社が販売しているロボットキットで関西圏で人気があるようです。
これもLEGOと同じように複数のセンサーの搭載が可能となっています。
また、大きな特徴としてタミヤの工作パーツ等の取り付けが容易となっていて
気軽に擬似自作ロボットのようなものの作成ができるようになっています。
販売されているセンサーも、かなりロボカップを意識した構成となっているので
基本的にはプログラムを組むだけで簡単に高度なレスキューロボットの作成が行えるようになっています。
次はロボデザイナーです。

昔は埼玉でよくみかけましたが、今のレスキューでは殆ど見かけなくなりました。絶滅危惧種です。
なぜ昔はたくさんいたのに今は絶滅寸前になってしまっているかというと・・・一度使ってみればわかります。
セットのタッチセンサーは押されにくいし、
セットのライトセンサーはラインの反応は鈍いし、
アナログの入力は少ないし、
モーターの速度制御のプログラムがほとんど動きに反映されてないし、
セットの電池は単1(単2だったかも)で重たいし使いにくし、
セットのプログラマは使いにくいし、
そもそもセットのギアボックスの性能が酷くてただ前進させるだけでも結構高度なプログラムがいるし、
・・・でそれらを全て解決していくうちにあることに気がつくんです。
「これじゃ只の自作じゃん・・・」と。
というわけで最後は自作機についてです。
自作機というものについて、皆さんそれぞれ解釈があると思いますが、ここでは
「ロボット本体も中の回路もオリジナル製作」というものということにしておきます。
あ、タミヤの工作パーツ等の使用は自作に含まれます。あと汎用のセンサーモジュールの使用も含まれます。
これの利点は汎用のロボットキットを使用しないから競技にあわせたロボットの仕様が用意に作れます。
ロボットの形状もキットに存在したある程度の制約を無視でき、また、センサー等の使用に限度がないので
一番自由にロボットを作成できる方法といえるでしょう。
また、自由に作れるという点から競技に合わせた、競技専用のロボットが作れるので、
しっかり作れば一番強いと言う利点があります。
反面、一から作るので時間はかかるし、メーカー品ではないので安定性に疑問が残ってしまいます。
力量以上のものは作れないので、人間側の実力がキット以上に必要になってきてしまいます。
なので初心者や機械構造、電子回路両方にに自信の無い人にはお勧めできませんね。
その点を補うためか、自作機のチームは複数人数いることが多いようですね。
なーんて長い説明致しましたが、結局、僕は何を使おうか。ということになるんですね。
僕の手元には紹介したものはDROID以外は全てあるので(自作経験もあるし)選択範囲は広いのですが、
SCOUTは使う気になれないので却下、
ロボデザイナーは問題外なので降ろし、
自作機は設計済みなんですが、時間がなさそうなので今年も見送り、
残る選択肢はRCXとNXTとTJ3です。
しかし、RCXのモーターとそれに合わせたRCXの出力ポートはパワーが低く、
重りの入った缶を持ち上げ、移動させなければならない新ルールの上では不利と判断し、断念しました。
TJ3はその点有利なのですが、
ロボデザイナーと同じように、ロボットの外形は自作しなければ競技に対応できないことと、
「なんか使うのがイヤ」だったのでNXTにしました。
結局これに落ち着いちゃったよ・・・
と云うわけで今年もLEGOです。
因みにロボデザイナーが昔多かったのは、昔は競技が簡単だったので、
あの問題を解決しなくてもある程度勝ち進めたからなんですよね。結局。
あ。因みにロボデザイナーはサッカーでは結構使えますよ。あのセンサーはボールの検出は行いやすいし、
アナログの入力はあまりいらないし、タッチセンサー使わないし。
残りの問題を解決すれば十分実践対応できます。適材適所ってやつですかね。
LEGOはサッカーじゃ使えないのと同じです。
(^・ω・)ノRadiumProduction in RoboCupJunior
直ぐに要所要所の構造を考える人もいれば、大まかな形を直ぐに考える人もいるでしょう。
中には何も考えずに作り始めちゃう方もいるかもしれません。
そんな色んな人たちがいる中で、僕はどうしているか・・・というと。
まずは「なにがしたい」かを明確に考えます。
この「なにがしたい」というのは、どんな風に動かして、何を判断できるロボットを作るのか。
それを考えます。
実はもうこれだけでロボットの形状は殆ど決定してしまいます。
まず、自分の動かしたいように動くロボットを作ろうとすると、重心の位置、サイズが決まってきます。
もうその時点でロボットの大体の外形は決まってきてしまうのです。
そして何を判断するか。ロボットは基本的にセンサーを利用して周りの状況を判断するので、
「何を検知するかを決める」ということは、そのまま「どんなセンサーを使うか」ということなので
使用するセンサーも決まってきてしまいます。
これだけ決まればロボットの形状はほぼ完全に決まってしまいますよね?
。
というわけでまず、「なにがしたい」か、を考えてロボットの形を決めます。
次は「なにで作る」かです。
この「なにで作る」というのはロボットのベースの素材のことです。言い方を変えれば使用するキット?
例えばLEGO
日本のレスキューでは千葉以外の関東圏で一番多くみられる傾向があるようです。
というより他では殆ど見ない?かな?
これはラーニングシステム社が販売している教育用ロボットキットでLEGOブロックで構成されています。
中枢となるコアはLEGOMindStormというブロック。
この中に全ての制御基板と電池が内臓されています。マイコンでいうメインボード的なものでしょうか。
RIS(”ろぼてぃっくすいんべんしょんしすてむ”だったかな)というシステムを採用したロボットキットだったっけ。
この辺は昔僕が書いた論文に全部かいてあるんですが、どこにやったっけなぁ・・・(笑)
今までに大きく分けて4種類のMindStormが販売され、その中の3種類は既に生産を終了しています。
これがその4種類です。
RCX
入出力それそれ3ポートずつあり、外部でセンサー、。モーター等を接続できます。入力は全てアナログです。
PCでプログラムを組み、それを赤外線通信でダウンロードして走ります。ダウンロードが無茶苦茶遅いです。
また、中身はH8マイコンなのですが、何を血迷ったのか事実上のクロック周期が6msという仕様になっています。
なので素早い動きにはセンサーがついていけません。
現在、1.0と1.5と2.0の3種類がありますが、実際どれも大差ありません。何れも生産終了です。
SCOUT
小さいプログラムならPCいらずでプログラムが組めるというブロックです。
しかし、外部入出力ともに2ポートである上に、セットにライトセンサーが含まれてないことからか、
これでロボカップに出場していたロボットは過去に一度しか見たことがありませんね。
PCでのプログラムはRCXのものと同じように組むことができます。内部の仕様は余り変わらないみたい。
赤外線受光機の隣にライトセンサーが内蔵されていますが、レスキューでは果たして使い道があるのか・・・?
サッカー競技では何とか使えそうです。
DROID
ボタンが3つ。とても単純ですね。
これはプログラムは一切組むことができず、7つの内蔵プログラムを選択して実行させることしかできません。
外部入出力もないのでロボカップ競技に使うのは難しいです。というかムリ?
現にこれを使用していたロボットはみたことないですね。。。
NXT
唯一、現在生産が終了していないMindstormがこのNXTです。
事実上のRCXの後継機ですが他のシリーズより10年以上新しいものなので、
他のシリーズには無い様々な機能があります。
まずPCからのプログラムダウンロードが有線になったので格段に速度が上がりました。
次にモーターが大きく、力強くなりました。
RCXのモーターは消費電流が500mAしかなくて、凄く電池が長持ちしたのですがその分パワーが残念でした。
しかし、NXTのモーターは非常に高い消費電力で、
尚且つ内部にギアボックスが組まれているのでRCXと比べると凄いパワーがでます。
しかしその分電池の減りは早いです。
因みにサーボモーターとか書いてありますが実際は擬似サーボです。嘘っぱちです。
次に動作速度、特にセンサーの応答速度が格段に速くなったので、素早い動きにもついていけるようになりました。
そして大きいのが入力ポートです。4つに増えた上に、
そのそれぞれが既存のアナログ入力以外にI2Cの通信規格を採用したので、
事実上アナログ(4)+I2C(4*112)で合計452個のセンサーの制御が可能となっています。
LEGOの説明はこのぐらいでしょう。
他にもLEGOスパイボットというものも存在しますが、あれもレスキュー競技ではあまり使い道がありません。
次はTJ3です。
ダイセン工業株式会社が販売しているロボットキットで関西圏で人気があるようです。
これもLEGOと同じように複数のセンサーの搭載が可能となっています。
また、大きな特徴としてタミヤの工作パーツ等の取り付けが容易となっていて
気軽に擬似自作ロボットのようなものの作成ができるようになっています。
販売されているセンサーも、かなりロボカップを意識した構成となっているので
基本的にはプログラムを組むだけで簡単に高度なレスキューロボットの作成が行えるようになっています。
次はロボデザイナーです。
昔は埼玉でよくみかけましたが、今のレスキューでは殆ど見かけなくなりました。絶滅危惧種です。
なぜ昔はたくさんいたのに今は絶滅寸前になってしまっているかというと・・・一度使ってみればわかります。
セットのタッチセンサーは押されにくいし、
セットのライトセンサーはラインの反応は鈍いし、
アナログの入力は少ないし、
モーターの速度制御のプログラムがほとんど動きに反映されてないし、
セットの電池は単1(単2だったかも)で重たいし使いにくし、
セットのプログラマは使いにくいし、
そもそもセットのギアボックスの性能が酷くてただ前進させるだけでも結構高度なプログラムがいるし、
・・・でそれらを全て解決していくうちにあることに気がつくんです。
「これじゃ只の自作じゃん・・・」と。
というわけで最後は自作機についてです。
自作機というものについて、皆さんそれぞれ解釈があると思いますが、ここでは
「ロボット本体も中の回路もオリジナル製作」というものということにしておきます。
あ、タミヤの工作パーツ等の使用は自作に含まれます。あと汎用のセンサーモジュールの使用も含まれます。
これの利点は汎用のロボットキットを使用しないから競技にあわせたロボットの仕様が用意に作れます。
ロボットの形状もキットに存在したある程度の制約を無視でき、また、センサー等の使用に限度がないので
一番自由にロボットを作成できる方法といえるでしょう。
また、自由に作れるという点から競技に合わせた、競技専用のロボットが作れるので、
しっかり作れば一番強いと言う利点があります。
反面、一から作るので時間はかかるし、メーカー品ではないので安定性に疑問が残ってしまいます。
力量以上のものは作れないので、人間側の実力がキット以上に必要になってきてしまいます。
なので初心者や機械構造、電子回路両方にに自信の無い人にはお勧めできませんね。
その点を補うためか、自作機のチームは複数人数いることが多いようですね。
なーんて長い説明致しましたが、結局、僕は何を使おうか。ということになるんですね。
僕の手元には紹介したものはDROID以外は全てあるので(自作経験もあるし)選択範囲は広いのですが、
SCOUTは使う気になれないので却下、
ロボデザイナーは問題外なので降ろし、
自作機は設計済みなんですが、時間がなさそうなので今年も見送り、
残る選択肢はRCXとNXTとTJ3です。
しかし、RCXのモーターとそれに合わせたRCXの出力ポートはパワーが低く、
重りの入った缶を持ち上げ、移動させなければならない新ルールの上では不利と判断し、断念しました。
TJ3はその点有利なのですが、
ロボデザイナーと同じように、ロボットの外形は自作しなければ競技に対応できないことと、
「なんか使うのがイヤ」だったのでNXTにしました。
結局これに落ち着いちゃったよ・・・
と云うわけで今年もLEGOです。
因みにロボデザイナーが昔多かったのは、昔は競技が簡単だったので、
あの問題を解決しなくてもある程度勝ち進めたからなんですよね。結局。
あ。因みにロボデザイナーはサッカーでは結構使えますよ。あのセンサーはボールの検出は行いやすいし、
アナログの入力はあまりいらないし、タッチセンサー使わないし。
残りの問題を解決すれば十分実践対応できます。適材適所ってやつですかね。
LEGOはサッカーじゃ使えないのと同じです。
(^・ω・)ノRadiumProduction in RoboCupJunior
あけましておめでとうございます。
関東地区のロボカッパーにはご存知の方もいらっしゃるかも知れませんが、一応はじめましてということで。
Radiumと申します。
この名前は2009年から2010年までのロボカップ参加時のチーム名です。
このブログではこの名前を使っていきたいと考えております。
とりあえず、まずこのブログではロボカップ、当面は2011年度のレスキュー競技に対しての活動について
書いていこうかなとか考えてます。
あ。僕は地域は関東、東東京ノードからの参加になります。
区分はセカンダリです。
去年レスキューBで世界大会に行って惨敗してきました 。今年はレスキューAにでますよー。
と云うわけでまずは・・・
ロボット作んなきゃ。
因みにカウンターに関してですが、前のロボカップ用のブログの引継ぎなので・・・
最初っから凄い数になってますがお気になさらず(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
関東地区のロボカッパーにはご存知の方もいらっしゃるかも知れませんが、一応はじめましてということで。
Radiumと申します。
この名前は2009年から2010年までのロボカップ参加時のチーム名です。
このブログではこの名前を使っていきたいと考えております。
とりあえず、まずこのブログではロボカップ、当面は2011年度のレスキュー競技に対しての活動について
書いていこうかなとか考えてます。
あ。僕は地域は関東、東東京ノードからの参加になります。
区分はセカンダリです。
去年レスキューBで世界大会に行って惨敗してきました 。今年はレスキューAにでますよー。
と云うわけでまずは・・・
ロボット作んなきゃ。
因みにカウンターに関してですが、前のロボカップ用のブログの引継ぎなので・・・
最初っから凄い数になってますがお気になさらず(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
ライントレースを行うロボットのシミュレーションゲームです。紹介ページ
ランダムなコースを
3個のラインセンサーの値からロボットの動作を決定します。
基本的には十字キーで選択、エンターキーで決定となります。
RETURNを選択すると前の画面に戻ります。
Game Start
Make Programで記述したプログラムを実行します。
最初に実行するプログラムを選択して実行します。
ゴールした際は、
Make Program
プログラムを作成します。
プログラムは各センサーの状況ごとに9通りの動作指定が行えます
また、合計で5個のプログラムの保存が行えます。
Sensor設定
SENSOR1:左のセンサー
SENSOR2:真ん中のセンサー
SENSOR3:右のセンサー
ON:センサーがラインを検知している
OFF:センサーがラインを検知していない
Ex)SENSOR1 ON:左のセンサーだけがラインを検知している
SENSOR1&2 ON:左のセンサーと真ん中のセンサーがラインを検知している
Move設定
DON'T COM:何もしない(前の動作を継続)
FORWADR:前進
LEFT TURN:左回転
RIGHT TURN:右回転
LEFT CURVE:左旋回
RIGHT CURVE:右旋回
Time設定
Moveで設定した動作を行う(繰り返し実行する)回数を設定する。(0~8)
動作中のセンサーの感度に相当するので、大きければ大きいほど動きが大まかになり、小さいほど小刻みになる。
Control Mode
コースを自由に走行できます。
ロボットの移動は十字キーで行います。
Config
各種設定が行えます。プログラムの削除もここで行います。
Escape
LineSimulatorを終了します。
※ Avast!等、一部のウイルス・セキュリティソフトで
このソフトがウイルスと誤検知されたという報告が寄せられています。
もし、ソフトのインストールが正常に行えない場合は対応させて頂きますので
toaru_sangi_no_rcj☆yahoo.co.jp(☆を@に変更)までご連絡お願い致します。
バッチファイル的なもの
ダウンロード後、C\ProgramFiles\LineSimulator内のLineSimulator.exeに上書きしてください。
Version 1.0.1 H24/10/29
ランダムなコースを
3個のラインセンサーの値からロボットの動作を決定します。
基本的には十字キーで選択、エンターキーで決定となります。
RETURNを選択すると前の画面に戻ります。
Game Start
Make Programで記述したプログラムを実行します。
最初に実行するプログラムを選択して実行します。
ゴールした際は、
Make Program
プログラムを作成します。
プログラムは各センサーの状況ごとに9通りの動作指定が行えます
また、合計で5個のプログラムの保存が行えます。
Sensor設定
SENSOR1:左のセンサー
SENSOR2:真ん中のセンサー
SENSOR3:右のセンサー
ON:センサーがラインを検知している
OFF:センサーがラインを検知していない
Ex)SENSOR1 ON:左のセンサーだけがラインを検知している
SENSOR1&2 ON:左のセンサーと真ん中のセンサーがラインを検知している
Move設定
DON'T COM:何もしない(前の動作を継続)
FORWADR:前進
LEFT TURN:左回転
RIGHT TURN:右回転
LEFT CURVE:左旋回
RIGHT CURVE:右旋回
Time設定
Moveで設定した動作を行う(繰り返し実行する)回数を設定する。(0~8)
動作中のセンサーの感度に相当するので、大きければ大きいほど動きが大まかになり、小さいほど小刻みになる。
Control Mode
コースを自由に走行できます。
ロボットの移動は十字キーで行います。
Config
各種設定が行えます。プログラムの削除もここで行います。
Escape
LineSimulatorを終了します。
※ Avast!等、一部のウイルス・セキュリティソフトで
このソフトがウイルスと誤検知されたという報告が寄せられています。
もし、ソフトのインストールが正常に行えない場合は対応させて頂きますので
toaru_sangi_no_rcj☆yahoo.co.jp(☆を@に変更)までご連絡お願い致します。
バッチファイル的なもの
ダウンロード後、C\ProgramFiles\LineSimulator内のLineSimulator.exeに上書きしてください。
Version 1.0.1 H24/10/29
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ