RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
まぁ所謂液晶、ディスプレイです。

これの用途は・・・。まぁ大体わかりますよね。
プログラムのデバッグに使ったり、センサーの値を表示するのに使ったり、まぁそんな感じでしょうか。
必須のものではありませんが、あるとものすごく便利な逸品です。
特にロボットの場合はいちいちPCに繋いでデバッグしたりするのが面倒なのでよくLCDが搭載されています。
基本的にこれはマイコンで直接制御します。
一見複雑で、大変な処理が必要なように見えますが、大体のLCDはモジュール化しているので、
PICやAVR等の処理が貧相なマイコンでも普通のパラレル信号で通信ができることが殆どです。
しかもこの通信も普通だとちょっとタイミングが難しいのですが、大体どのLCDも中の仕様は同じなので
結構ライブラリ化されてあっちこっちに落ちていたりします。昔そういえばLCDライブラリ作ってひどい目にあったことがあるなぁ・・・
なのでそれさえ落とせば誰でも簡単にLCDが扱えるようになります。
因みに一口にLCDといっても、一般にマイコン等で使われるタイプには2種類あって、
一つがキャラクタ型、もう一つがグラフィック型です。
キャラクタ型というのは文字が既にLCDモジュールの方に登録されていて、
その文字をデータをパラレルでPICから送ってやることでその文字を表示させるという型で、
簡単に文字の出力を行うことが出来る反面、定義されている文字しか表示できないので汎用性に乏しいです。
グラフィック型は、文字通りドット単位で塗りつぶしを指定する、世間一般に使われている液晶に近い特性を持っています。
要するに文字単位での命令の送信はできないものですが、
ドット単位で表示を制御することができるので非常に汎用性に富んでいます。
ドットの許す限りなら、いかなる形でも表示をすることができるということですね。
まぁでもデバックしたりする際にわざわざ文字以外を使うことも無いので僕はキャラクタ型を使っています。
液晶をメイン使って何かしたいっていうのであればグラフィック型を使うほうがいいと思いますけどね。
という訳で今日はLCDの紹介でした。本当に紹介で終わったね。
実際のプログラムに関しては、使っているライブラリに依存しますのでここではあえて触れないことにします。
ライブラリのサンプルを見て、それっぽいものをコピペすればそれなりになるのでなないいでしょうか?
という訳でこの記事はこの辺で。
そうそう、今日は一年生の新入部員が4人も入ってくれましたよ♪
さてと、いつになったら名前覚えられるかな・・・・
(^・ω・)ノ RadiumProduction in RoboCup Junior
これの用途は・・・。まぁ大体わかりますよね。
プログラムのデバッグに使ったり、センサーの値を表示するのに使ったり、まぁそんな感じでしょうか。
必須のものではありませんが、あるとものすごく便利な逸品です。
特にロボットの場合はいちいちPCに繋いでデバッグしたりするのが面倒なのでよくLCDが搭載されています。
基本的にこれはマイコンで直接制御します。
一見複雑で、大変な処理が必要なように見えますが、大体のLCDはモジュール化しているので、
PICやAVR等の処理が貧相なマイコンでも普通のパラレル信号で通信ができることが殆どです。
しかもこの通信も普通だとちょっとタイミングが難しいのですが、大体どのLCDも中の仕様は同じなので
結構ライブラリ化されてあっちこっちに落ちていたりします。昔そういえばLCDライブラリ作ってひどい目にあったことがあるなぁ・・・
なのでそれさえ落とせば誰でも簡単にLCDが扱えるようになります。
因みに一口にLCDといっても、一般にマイコン等で使われるタイプには2種類あって、
一つがキャラクタ型、もう一つがグラフィック型です。
キャラクタ型というのは文字が既にLCDモジュールの方に登録されていて、
その文字をデータをパラレルでPICから送ってやることでその文字を表示させるという型で、
簡単に文字の出力を行うことが出来る反面、定義されている文字しか表示できないので汎用性に乏しいです。
グラフィック型は、文字通りドット単位で塗りつぶしを指定する、世間一般に使われている液晶に近い特性を持っています。
要するに文字単位での命令の送信はできないものですが、
ドット単位で表示を制御することができるので非常に汎用性に富んでいます。
ドットの許す限りなら、いかなる形でも表示をすることができるということですね。
まぁでもデバックしたりする際にわざわざ文字以外を使うことも無いので僕はキャラクタ型を使っています。
液晶をメイン使って何かしたいっていうのであればグラフィック型を使うほうがいいと思いますけどね。
という訳で今日はLCDの紹介でした。本当に紹介で終わったね。
実際のプログラムに関しては、使っているライブラリに依存しますのでここではあえて触れないことにします。
ライブラリのサンプルを見て、それっぽいものをコピペすればそれなりになるのでなないいでしょうか?
という訳でこの記事はこの辺で。
そうそう、今日は一年生の新入部員が4人も入ってくれましたよ♪
さてと、いつになったら名前覚えられるかな・・・・
(^・ω・)ノ RadiumProduction in RoboCup Junior
最近はPICだと、16F19XXシリーズしか使っていないような気がします。
32MXはなかったことになりましたからね・・・
部員にもオススメしちゃいましたのでちょっと紹介しようかと思います。
まずはコンパイラですが、基本的にハイテックを使うのが一般的なようです。
僕もハイテックで書いてますので16Fに関してはそれで統一しちゃいましょう。
さて、新しい新しいとは言っていますが、実際になにが違うのか。
まずはその辺りの話をしていこうと思います。
基本的には、プログラム視点だと古い三桁台も四桁台も対して変わりません。
まぁ同じコンパイラ使っていますから当たり前ですね。
でも、ハードウェア視点で見ると、違いが躊躇に出てきます。
なのでプログラムでも、ハードが関係する部分においては、多少の違いが現れてきます。
まずは動作クロック
CPUで何Gの・・・とか言っているアレと同じです。
クロックというのはパルス波、つまり周期的な電気信号なので、信号を発生させる発振子という物が必要になります。
三桁台の場合、その発振子を外部につけてやる必要があるのですが、
四桁台の場合は発振子は内蔵されているので必要がありません。
また、クロックは勿論大きいほうが性能は高いです。
処理速度でモロに関わってくる部分ですからね。
これも、三桁台は最大20MHzですが、四桁台は最大32MHzとなっています。
また、三桁台だと、一つの処理を行うのに4クロック必要になりますが、四桁台だと1クロックで済みます。
つまりこの違いだけでも処理速度に四倍の差があることがわかります。
次はプログラムの書込みについて
三桁台の場合・・・
というより普通のPICはプログラムの書き込みにPGDというピンとPGCというピンを状態で使用していました。
仕組みは勿論四桁台もかわらないのですが、何故か四桁台だけそのピンの名称のみが変更されているのです。
PGDはICSPDATというピンに、
PGCはICSPCLKというピンに、
それぞれ変更されています。
これはこのPICの書き込みに使われている通信がICSPというので
わざわざわかりやすい名前に改名したようです。
そして次は通信の際のピンの設定について。
基本的に、通信を行う際にも通信に使うピンは入力か出力かのどちらかに設定しないといけません。
只、その設定をどちらにするかが同じ通信でも三桁台と四桁台で変わってきます。
これが結構で間違えると通信ができない訳なのですが、通信自体のプログラムは同じなのに
ピン設定だけ違うということになりますので、しっかりデータシートを読まないとわからないのです。
落とし穴ともいうべき仕様変更ですね。
まぁ大まかに今、僕が知っているのはこのくらいでしょうか。
結構知らないと根本的にプログラムが書けなくなるような事項がほとんどなので、
16Fの四桁台を使うことがあれば以上の点に注意して頂けると非常に楽にプログラムが書けるかと思います。
という訳で、今回の記事はこの辺で。
次回は・・・なににしましょうか・・・
(^・ω・)ノ RadiumProduction in RoboCup Junior
32MXはなかったことになりましたからね・・・
部員にもオススメしちゃいましたのでちょっと紹介しようかと思います。
まずはコンパイラですが、基本的にハイテックを使うのが一般的なようです。
僕もハイテックで書いてますので16Fに関してはそれで統一しちゃいましょう。
さて、新しい新しいとは言っていますが、実際になにが違うのか。
まずはその辺りの話をしていこうと思います。
基本的には、プログラム視点だと古い三桁台も四桁台も対して変わりません。
まぁ同じコンパイラ使っていますから当たり前ですね。
でも、ハードウェア視点で見ると、違いが躊躇に出てきます。
なのでプログラムでも、ハードが関係する部分においては、多少の違いが現れてきます。
まずは動作クロック
CPUで何Gの・・・とか言っているアレと同じです。
クロックというのはパルス波、つまり周期的な電気信号なので、信号を発生させる発振子という物が必要になります。
三桁台の場合、その発振子を外部につけてやる必要があるのですが、
四桁台の場合は発振子は内蔵されているので必要がありません。
また、クロックは勿論大きいほうが性能は高いです。
処理速度でモロに関わってくる部分ですからね。
これも、三桁台は最大20MHzですが、四桁台は最大32MHzとなっています。
また、三桁台だと、一つの処理を行うのに4クロック必要になりますが、四桁台だと1クロックで済みます。
つまりこの違いだけでも処理速度に四倍の差があることがわかります。
次はプログラムの書込みについて
三桁台の場合・・・
というより普通のPICはプログラムの書き込みにPGDというピンとPGCというピンを状態で使用していました。
仕組みは勿論四桁台もかわらないのですが、何故か四桁台だけそのピンの名称のみが変更されているのです。
PGDはICSPDATというピンに、
PGCはICSPCLKというピンに、
それぞれ変更されています。
これはこのPICの書き込みに使われている通信がICSPというので
わざわざわかりやすい名前に改名したようです。
そして次は通信の際のピンの設定について。
基本的に、通信を行う際にも通信に使うピンは入力か出力かのどちらかに設定しないといけません。
只、その設定をどちらにするかが同じ通信でも三桁台と四桁台で変わってきます。
これが結構で間違えると通信ができない訳なのですが、通信自体のプログラムは同じなのに
ピン設定だけ違うということになりますので、しっかりデータシートを読まないとわからないのです。
落とし穴ともいうべき仕様変更ですね。
まぁ大まかに今、僕が知っているのはこのくらいでしょうか。
結構知らないと根本的にプログラムが書けなくなるような事項がほとんどなので、
16Fの四桁台を使うことがあれば以上の点に注意して頂けると非常に楽にプログラムが書けるかと思います。
という訳で、今回の記事はこの辺で。
次回は・・・なににしましょうか・・・
(^・ω・)ノ RadiumProduction in RoboCup Junior
災害現場を想定しているのになんで坂があるんでしょうね。しかもあんなキツイ傾斜の・・・
まぁラインがある時点でアレですから突っ込まないほうがいいのかな。
という訳で一年ぶりぐらいのロボカップの競技自体の紹介記事です。
ものすっごく今更感漂っていますが、需要があるから仕方が無いです。
という訳でレスキュー競技の紹介の続きです。
2012年度のレスキュールールだと、アリーナには坂があります。

まぁラインが敷いてあった1階とは違って、ラインはしかなくても良いという表記になっていますが、
今の日本だと慣例として、坂のラインにはついては上の写真のような形にする場合が多いです。
「坂」の定義は2部屋目を出てから最後の部屋までなので傾斜部分の前後の踊り場も坂に含めるということなのですが、
基本的に下の踊り場のみにラインが敷かれています。今年のジャパンでは決勝で微妙に坂にもラインがかかっていましたが・・・
それでこの坂を登りきって、上の踊り場からロボットが完全に2階の部屋に入った時点で20点の得点となります。
追記:2012ルールからは得点が30点に戻されました。2012では競技進行停止の数により得点が変動します。
一見簡単に見えますけど、坂の傾斜は25度。
25度って言うと・・・そんな傾斜の道路なんてあるのかな?っていうぐらいの傾斜の坂ですね。
道路構造令によると、一般道路の勾配は6.8度以下である必要があるそうなので、日本にはこんな坂は存在しないようです。
それぐらいキツイ傾斜の坂を登る必要があるわけですね。かなり大きな課題です。
しかも最近では缶を掴んで持ち上げる機構を搭載した上で、坂を登らないといけないですから、一層難しくなっています。
という訳でレスキューの中でも難しい部類の課題になるかと思います。
只、坂を登るかどうかという話はプログラムではなく機械の方の話になりますね。
プログラムではどちらかというと、ラインが無くなってライントレースができなくなったので
坂になったらライントレースじゃないプログラムに変えるという坂の検知が必要になってきます。
その為に加速度やら水銀やらといったセンサーが投入されることになった訳ですね。
まぁ以上が坂のおおまかな説明です。
登り切ったと思ったら出口で引っかかる・・・なんてことも多々あったりするので非常に厄介な課題ですね。
(^・ω・)ノ RadiumProduction in RoboCup Junior
まぁラインがある時点でアレですから突っ込まないほうがいいのかな。
という訳で一年ぶりぐらいのロボカップの競技自体の紹介記事です。
ものすっごく今更感漂っていますが、需要があるから仕方が無いです。
という訳でレスキュー競技の紹介の続きです。
2012年度のレスキュールールだと、アリーナには坂があります。
まぁラインが敷いてあった1階とは違って、ラインはしかなくても良いという表記になっていますが、
今の日本だと慣例として、坂のラインにはついては上の写真のような形にする場合が多いです。
「坂」の定義は2部屋目を出てから最後の部屋までなので傾斜部分の前後の踊り場も坂に含めるということなのですが、
基本的に下の踊り場のみにラインが敷かれています。今年のジャパンでは決勝で微妙に坂にもラインがかかっていましたが・・・
それでこの坂を登りきって、上の踊り場からロボットが完全に2階の部屋に入った時点で20点の得点となります。
追記:2012ルールからは得点が30点に戻されました。2012では競技進行停止の数により得点が変動します。
一見簡単に見えますけど、坂の傾斜は25度。
25度って言うと・・・そんな傾斜の道路なんてあるのかな?っていうぐらいの傾斜の坂ですね。
道路構造令によると、一般道路の勾配は6.8度以下である必要があるそうなので、日本にはこんな坂は存在しないようです。
それぐらいキツイ傾斜の坂を登る必要があるわけですね。かなり大きな課題です。
しかも最近では缶を掴んで持ち上げる機構を搭載した上で、坂を登らないといけないですから、一層難しくなっています。
という訳でレスキューの中でも難しい部類の課題になるかと思います。
只、坂を登るかどうかという話はプログラムではなく機械の方の話になりますね。
プログラムではどちらかというと、ラインが無くなってライントレースができなくなったので
坂になったらライントレースじゃないプログラムに変えるという坂の検知が必要になってきます。
その為に加速度やら水銀やらといったセンサーが投入されることになった訳ですね。
まぁ以上が坂のおおまかな説明です。
登り切ったと思ったら出口で引っかかる・・・なんてことも多々あったりするので非常に厄介な課題ですね。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今日は回路図についてのお話です。
といっても回路図自体の説明は以前の記事で致しましたので、今回は省略させて頂きます。
今回紹介するのは回路図を描くソフト、所謂回路図エディタです。
以前の記事で、回路図には配線図とパターン図の2種類があるという話はしたかと思います。
配線図というのが素子同士の接続について表した図で
パターン図というのが実際に基盤に半田付けする際の設計図になります。
どうして二つ必要なのかという点に関しては、以前の記事をご参照下さい。
今回紹介するのは、これらの回路図エディタの中でもフリーのもの、
つまり無料でダウンロードできるものを紹介します。
まずは配線図のエディタ、今回紹介するのはBSchというソフトです。
これの特徴はなんといっても使い易い、
そしてライブラリ、つまり素子のデータが多いという点です。
使い方は簡単でみたまんま、
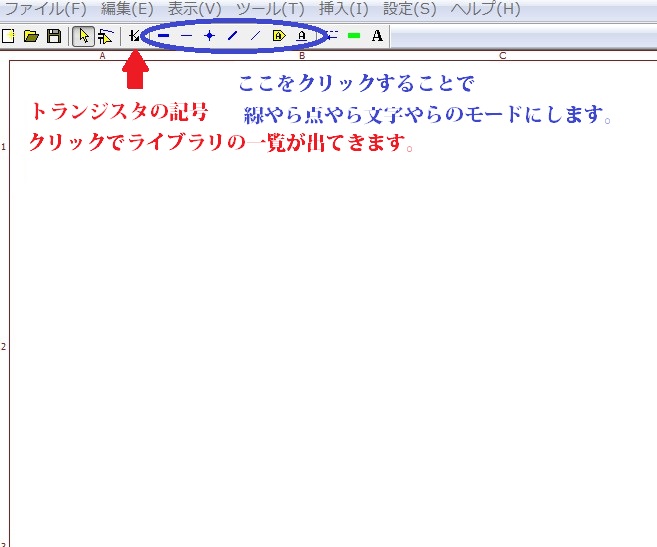
バーの下にあるトランジスタの記号をクリックすると素子のライブラリが出てくるので、使いたい素子をクリック。
あとは同じくバーの下にある線のマークをクリックして素子同士を繋ぐだけ。
その繰り返しで簡単に描くことができます。
このソフトは水魚堂さんのサイトにてダウンロードが可能です。
次に紹介するのはパターン図エディタ、今回紹介するのはPCBEというソフトです。
これは素子のライブラリが存在せず、全部線だけで書いていくようになっています。
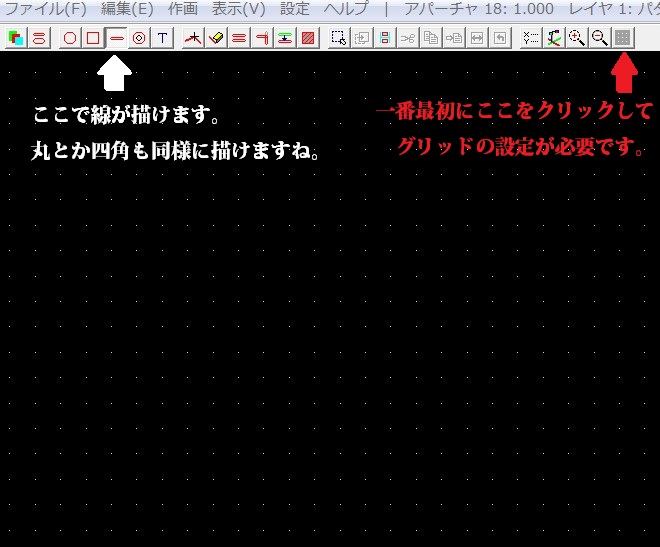
変えられるのは線の色と太さだけ。後は線の他に丸とかが書ける程度です。
これしか機能がないからこそ簡単なんです。
基本的にはまずバーの下にある点がいっぱいあるボタンをクリックした後で
グリッドの幅、即ちピッチを選択します。
単位はミリなので、通常は2.54と入力します。
次に使う基盤の大きさに合わせて外形線で基盤の外形を書きます。
これがいちいち数えなくてはいけないので面倒ですが、
一度作ってしまえば後は流用できるので、さほど問題ではないでしょう。
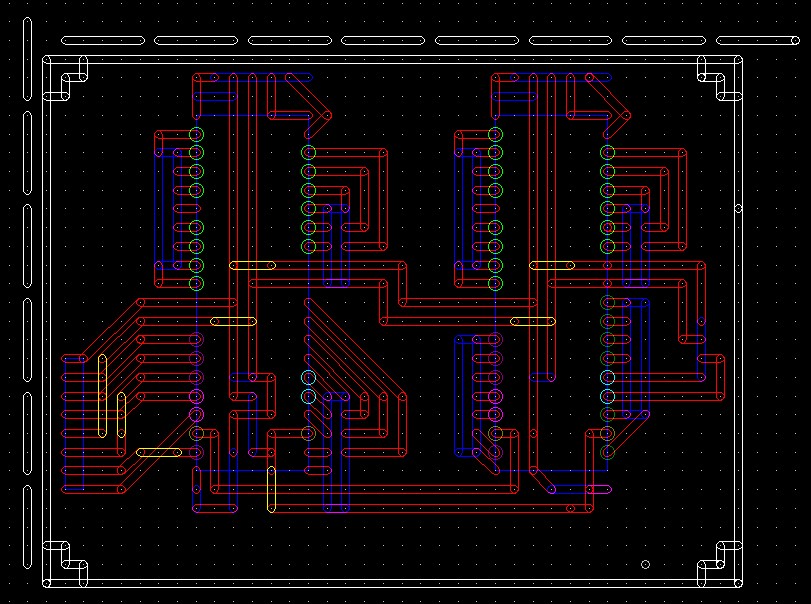
あとはグリッドを基盤の穴に見たてて線を使って配線や素子を描いていくだけです。
素子、ジャンパ線、配線等、種類によって色分けすると見やすいと思います。
色の指定はバー右のレイヤで、線の太さの指定はその右のアパーチャで行なうことができます。
PCBEでパターン図を描くとこんな感じになりますね。
PCBEもフリーソフトでこちらのサイトからダウンロードできます。
という訳で、今回は回路図エディタの紹介でした。
BSchについては、自分でライブラリ、つまり自分で好きな素子の形を作ることもできます。
使いたい素子がライブラリにない場合はライブラリを探すか作る必要があるので結構大事な内容です。
これに関しても、後々書いていこうと考えています。
また、フリー以外、つまり有料のソフトだとかなり優秀な回路図エディタもあるので
そちらについても以後紹介したいと考えています。
ひとまず今回の記事はこの辺で。
(^・ω・)ノ RadiumProduction in RoboCup Junior
追記:Bタイプの基盤用のpcbeデータ上げておきます。線の内側の点が一番端になります。
といっても回路図自体の説明は以前の記事で致しましたので、今回は省略させて頂きます。
今回紹介するのは回路図を描くソフト、所謂回路図エディタです。
以前の記事で、回路図には配線図とパターン図の2種類があるという話はしたかと思います。
配線図というのが素子同士の接続について表した図で
パターン図というのが実際に基盤に半田付けする際の設計図になります。
どうして二つ必要なのかという点に関しては、以前の記事をご参照下さい。
今回紹介するのは、これらの回路図エディタの中でもフリーのもの、
つまり無料でダウンロードできるものを紹介します。
まずは配線図のエディタ、今回紹介するのはBSchというソフトです。
これの特徴はなんといっても使い易い、
そしてライブラリ、つまり素子のデータが多いという点です。
使い方は簡単でみたまんま、
バーの下にあるトランジスタの記号をクリックすると素子のライブラリが出てくるので、使いたい素子をクリック。
あとは同じくバーの下にある線のマークをクリックして素子同士を繋ぐだけ。
その繰り返しで簡単に描くことができます。
このソフトは水魚堂さんのサイトにてダウンロードが可能です。
次に紹介するのはパターン図エディタ、今回紹介するのはPCBEというソフトです。
これは素子のライブラリが存在せず、全部線だけで書いていくようになっています。
変えられるのは線の色と太さだけ。後は線の他に丸とかが書ける程度です。
これしか機能がないからこそ簡単なんです。
基本的にはまずバーの下にある点がいっぱいあるボタンをクリックした後で
グリッドの幅、即ちピッチを選択します。
単位はミリなので、通常は2.54と入力します。
次に使う基盤の大きさに合わせて外形線で基盤の外形を書きます。
これがいちいち数えなくてはいけないので面倒ですが、
一度作ってしまえば後は流用できるので、さほど問題ではないでしょう。
あとはグリッドを基盤の穴に見たてて線を使って配線や素子を描いていくだけです。
素子、ジャンパ線、配線等、種類によって色分けすると見やすいと思います。
色の指定はバー右のレイヤで、線の太さの指定はその右のアパーチャで行なうことができます。
PCBEでパターン図を描くとこんな感じになりますね。
PCBEもフリーソフトでこちらのサイトからダウンロードできます。
という訳で、今回は回路図エディタの紹介でした。
BSchについては、自分でライブラリ、つまり自分で好きな素子の形を作ることもできます。
使いたい素子がライブラリにない場合はライブラリを探すか作る必要があるので結構大事な内容です。
これに関しても、後々書いていこうと考えています。
また、フリー以外、つまり有料のソフトだとかなり優秀な回路図エディタもあるので
そちらについても以後紹介したいと考えています。
ひとまず今回の記事はこの辺で。
(^・ω・)ノ RadiumProduction in RoboCup Junior
追記:Bタイプの基盤用のpcbeデータ上げておきます。線の内側の点が一番端になります。
先程授業のあとに、研究室によったらARMマイコンのボードが借りられました。
ARMというのは簡単に言うとPICよりすごいマイコンで、具体的には、
ルンバとかりんご社のなんたらpodとか、某任天堂のゲーム機とか、
基本的に組み込みでは殆どこのARMマイコンが使われています。
あと外しちゃいけないのがNXT。これも中のマイコンはARMでしたよね。
このようにARMマイコンは今世界で一番組み込みで使われているであろうマイコンなので、
身につけておいた方がいいかなぁと思い、去年当たりからちょくちょく手をだしてはいるのですけど
そろそろ本格的に始めたいなぁと思っていたところでした。
そこで紆余曲折・・・あった訳ではないですけど、借りられることになったので一個借りてきました。
ARMボードはいくつか持っているのですけど、どれも非常に残念なものばかりなので・・・
という訳でこちらのボードを借りてきました。
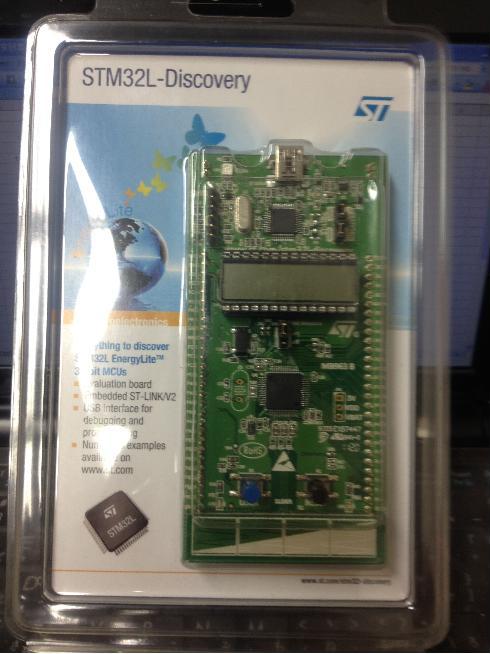
まぁこれもそこまでいいもの・・・というわけではないのですけど、まぁそれなりといった所でしょうか。
とりあえずこれで遊んでみようと思います・・・と言いたいけどまずは環境揃えないと・・・。
ARMって評価ボードによって環境が全然違いますからちょっと面倒なんです。
しかもボードの場合はなんかUBSで勝手に書き込んでくれる場合がほとんどなので気にしないのですが、
自分でボード作ろうと思ったときに、プログラムの書き込み方がわからないんですよね。
一体これどうなっているのでしょう・・・?
まぁそんな感じでARMを借りてきました。
(^・ω・)ノ RadiumProduction in RoboCup Junior
ARMというのは簡単に言うとPICよりすごいマイコンで、具体的には、
ルンバとかりんご社のなんたらpodとか、某任天堂のゲーム機とか、
基本的に組み込みでは殆どこのARMマイコンが使われています。
あと外しちゃいけないのがNXT。これも中のマイコンはARMでしたよね。
このようにARMマイコンは今世界で一番組み込みで使われているであろうマイコンなので、
身につけておいた方がいいかなぁと思い、去年当たりからちょくちょく手をだしてはいるのですけど
そろそろ本格的に始めたいなぁと思っていたところでした。
そこで紆余曲折・・・あった訳ではないですけど、借りられることになったので一個借りてきました。
ARMボードはいくつか持っているのですけど、どれも非常に残念なものばかりなので・・・
という訳でこちらのボードを借りてきました。
まぁこれもそこまでいいもの・・・というわけではないのですけど、まぁそれなりといった所でしょうか。
とりあえずこれで遊んでみようと思います・・・と言いたいけどまずは環境揃えないと・・・。
ARMって評価ボードによって環境が全然違いますからちょっと面倒なんです。
しかもボードの場合はなんかUBSで勝手に書き込んでくれる場合がほとんどなので気にしないのですが、
自分でボード作ろうと思ったときに、プログラムの書き込み方がわからないんですよね。
一体これどうなっているのでしょう・・・?
まぁそんな感じでARMを借りてきました。
(^・ω・)ノ RadiumProduction in RoboCup Junior
ほんとに久しぶりっていうかスミマセン、完全に忘れていました。
データシートについての記事です。
前回の話だと、データシートというのはWEBに転がっている回路素子やICの説明書であるという話を致しました。
それで次は「実際のデータシートを用いて説明云々」書いてあるのですけど、
データシートって説明するも何も、読めば判るように書いてあるんですよね。
基本的にデータシートは英語のものが殆どですが、Google先生に任せてみたり、前後の文から推察してみると
英語がわからなくても大体読めるようになります。
という訳で今回はデータシートには何が書いてあるの?ということをかいつまんで説明します。
データシートのパターンは普通にロボカップとかで使う回路部品だと大体3パターンに別れてきます。
まず一つが回路素子のパターン
これはトランジスタとかダイオードといった単体の素子やNOTやORのような論理IC等が該当します。
これらのデータシートはまず一ページ目にピンアサイン(ピン配置)や絶対最大定格、
つまり「これ以上流すと素子が壊れますよ」という値が電流だの電圧だのって感じの表が載っています。
それでそのあとで大体電気的特性、つまり印加する電圧や電流を一定の値にした際に出力だのがどうなるか、
ということが書かれた表が載っています。基本的に指定した電圧値やら何やらは表の右上やセル内にちっちゃくかいてあったりします。
そしてその後で大体特性のグラフやら何やらが載っています。
これは温度に対しての出力の変化やら、入力に対しての出力の変化などが載っていることが多いです。
後、場合によってはサンプルの回路図なんかも乗っていることもありますね。
というのが一つ目のパターン
二つ目のパターンはセンサーモジュールのパターン
これは基本的に最初のページでそのセンサーの説明や、出力形式や測定範囲などの大体の上方が載っています。
そして出力形式が単純にアナログやデジタル出ない場合(通信などの場合)は通信方法やら通信形式やらの
細かい手順が載っていることが多いです。
特にI2C形式だと、アドレスとかがその付近に書かれている場合が非常に多いので注意しましょう。
そして三つ目がPIC等のマイコンの場合。
これはまずページ数がおかしいです。500、600当たり前です。
まぁそれもそのはず、データシートなので、全てここに書いてあります。
関数はコンパイラ依存なので記述はありませんが、レジスタやその為命令等は全て書いてあったりします。
つまり、PICの本なんかがよく書店で売られていますけど、データシートさえあれば、
データシートだけの情報でPICのプログラムを書くこともできるという訳です。だから実は本なんていらない!
勿論PWMやAD変換、I2Cなんかも命令だけではなく、実際の操作手順等も全てここに書いてありますので、
本当に英語さえ何とかなれば本いらずなんですね。
言語の壁を超えればそれで此方はタダですから、とっても安上がりです。本は高いですから・・・。
というのがデータシートの3パターンです。
何れのものも、スラスラ読めるようになるにはやっぱり慣れが一番だと思います。
マイコン系以外であれば、英語ができなくても、大体の意味は慣れればわかってくるし、
わからないところはGoogle先生にお願いするだけの簡単なお仕事ですから、
最初怖がらずに読もうとすれば案外結構読めるようになるはずです。
まぁたまにセンサーの説明等で意味不明な単語が出てきて、先生もお手上げして訳がわからなくなることもありますけど・・・。
というのが第2回のデータシートの説明の記事でした。
因みにデータシートをWEBで検索したい時は
まず最初にデータの見たい部品を買ったサイトのその部品の欄にいってみるといいと思います。
秋月や千石ならデータシートの直リンクが貼ってありますからね。
それでなければ、「部品名 datasheet」で検索すれば多分ヒットするはずです。
それでなければ販売者に問い合わせでもしてみればいいのではないでしょうか。対応してくれるかは微妙ですけど。
そんな感じで結構雑になりましたがデータシートの説明を終了したいと思います。
それではまた。
(^・ω・)ノ RadiumProduction in RoboCup Junior
データシートについての記事です。
前回の話だと、データシートというのはWEBに転がっている回路素子やICの説明書であるという話を致しました。
それで次は「実際のデータシートを用いて説明云々」書いてあるのですけど、
データシートって説明するも何も、読めば判るように書いてあるんですよね。
基本的にデータシートは英語のものが殆どですが、Google先生に任せてみたり、前後の文から推察してみると
英語がわからなくても大体読めるようになります。
という訳で今回はデータシートには何が書いてあるの?ということをかいつまんで説明します。
データシートのパターンは普通にロボカップとかで使う回路部品だと大体3パターンに別れてきます。
まず一つが回路素子のパターン
これはトランジスタとかダイオードといった単体の素子やNOTやORのような論理IC等が該当します。
これらのデータシートはまず一ページ目にピンアサイン(ピン配置)や絶対最大定格、
つまり「これ以上流すと素子が壊れますよ」という値が電流だの電圧だのって感じの表が載っています。
それでそのあとで大体電気的特性、つまり印加する電圧や電流を一定の値にした際に出力だのがどうなるか、
ということが書かれた表が載っています。基本的に指定した電圧値やら何やらは表の右上やセル内にちっちゃくかいてあったりします。
そしてその後で大体特性のグラフやら何やらが載っています。
これは温度に対しての出力の変化やら、入力に対しての出力の変化などが載っていることが多いです。
後、場合によってはサンプルの回路図なんかも乗っていることもありますね。
というのが一つ目のパターン
二つ目のパターンはセンサーモジュールのパターン
これは基本的に最初のページでそのセンサーの説明や、出力形式や測定範囲などの大体の上方が載っています。
そして出力形式が単純にアナログやデジタル出ない場合(通信などの場合)は通信方法やら通信形式やらの
細かい手順が載っていることが多いです。
特にI2C形式だと、アドレスとかがその付近に書かれている場合が非常に多いので注意しましょう。
そして三つ目がPIC等のマイコンの場合。
これはまずページ数がおかしいです。500、600当たり前です。
まぁそれもそのはず、データシートなので、全てここに書いてあります。
関数はコンパイラ依存なので記述はありませんが、レジスタやその為命令等は全て書いてあったりします。
つまり、PICの本なんかがよく書店で売られていますけど、データシートさえあれば、
データシートだけの情報でPICのプログラムを書くこともできるという訳です。だから実は本なんていらない!
勿論PWMやAD変換、I2Cなんかも命令だけではなく、実際の操作手順等も全てここに書いてありますので、
本当に英語さえ何とかなれば本いらずなんですね。
言語の壁を超えればそれで此方はタダですから、とっても安上がりです。本は高いですから・・・。
というのがデータシートの3パターンです。
何れのものも、スラスラ読めるようになるにはやっぱり慣れが一番だと思います。
マイコン系以外であれば、英語ができなくても、大体の意味は慣れればわかってくるし、
わからないところはGoogle先生にお願いするだけの簡単なお仕事ですから、
最初怖がらずに読もうとすれば案外結構読めるようになるはずです。
まぁたまにセンサーの説明等で意味不明な単語が出てきて、先生もお手上げして訳がわからなくなることもありますけど・・・。
というのが第2回のデータシートの説明の記事でした。
因みにデータシートをWEBで検索したい時は
まず最初にデータの見たい部品を買ったサイトのその部品の欄にいってみるといいと思います。
秋月や千石ならデータシートの直リンクが貼ってありますからね。
それでなければ、「部品名 datasheet」で検索すれば多分ヒットするはずです。
それでなければ販売者に問い合わせでもしてみればいいのではないでしょうか。対応してくれるかは微妙ですけど。
そんな感じで結構雑になりましたがデータシートの説明を終了したいと思います。
それではまた。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今回はPICの種類についてです。
今まで話題に出てきた16Fとか24Fの違いについて説明することになります。
まず、PICには8bitのものと16bitのものと32bitのものの三種類があります。
これはパソコンでいうところの32bitCPUか64bitCPUかの違いに相当します。
これは基本的にはレジスタ等のビット数の違いに反映されています。
また、基本的にビット数が大きい程高性能になっています。
次にファミリーについて説明します。
PICの型番はそのほとんどが最初二桁が数字でその次がアルファベット、そしてその後に数字が並んで
最後に場合によってはアルファベットがくることがあります。
この最初の二桁+アルファベットのことをファミリーと呼びます。
ファミリーはPICの種類をそのまま示すもので、これによって使用するコンパイラなんかも変わってきます。
このファミリーのなかで今一番メジャーなのはアルファベットの部分がFになっているPICです。
これはフラッシュメモリが搭載されているPICで、プログラムを何度でも書き換えることができるものです。
逆にCと書いてあるものは、一度プログラムを書き込んだらもう書き換えが出来ないので注意しましょう。
ものによっては紫外線で書いたプログラムを消して、また書き込めるようになるものもありますけど・・・
このフラッシュメモリが搭載されている種類だと、
10F
12F
16F
18F
24F
24H
24H
DSP30F
DSP33F
32MX
32MX
まぁこの辺りが主な種類でしょうか。
10Fと12Fは極小規模のPICなのでうちの部では使っていません。
また、18Fも主にUSB用のPICとして作られている節があるので使っていません。
DSPとついているものはDSP機能が搭載されている種類で、割りと高性能ですが、
ちょっと秋月価格的にお高いのでこれもあまり使いませんね。
という訳なので、うちの部では16Fと24F、あとは24Hと32MX、大体この4つを利用しています。
因みに先程のbit構成で分けると、
18F以前のPICが8bit構成、24Fと24HとDSP30,33が16bit、32MXが32bit構成になっています。
図にするとこのような感じになります。
このようにPICには様々なファミリーが存在して、それぞれに特徴があって用途が変わってきます。
そしてそのファミリーの中でまた、色々な種類のPICがある訳です。
といっても同じファミリーのPIC同士なら内部構造はほとんど同じで、
違う点といったらピンの数とか、ピン配置といったことぐらいしかありません。
なのでコンパイラも同じものが使えますのでほとんどプログラムを流用することができます。
16F、18Fの場合は新しい4桁台のやつはちょっと他と違いますけど・・・
逆に違うファミリーだと、同じPICとはいえ、色々異なる点が多いので注意したほうがいいかと思います。
因みに僕がいま使っているのは16F1939なので左の緑の四角の中の青い丸、16FファミリーのPICです。
新しい4桁台のPICなのでちょっと古い16Fと命令の方法が違ったりするのでややこしいですね。
とりあえずPICの種類に関してはこんなところでしょうか。
結構数が多いのでどれを使えばいいか悩みどころだとは思いますが、迷ったときはまず16F を使えば間違いないと思います。
または24Fの一番ちっさいのを使うか。2つに1つってところですかね。
でも新規でPICをはじめるなら、安くて性能の良い16Fの4桁シリーズをお勧めします。
新しい分ちょっとデータが少ないですが、基本的なところは旧16Fと変わらない筈なのであまり困りはしないと思います。
という訳で今日の記事はこのへんで。PIC系列は今後も頻繁に更新されると思いますので宜しくお願いします。
(^・ω・)ノ RadiumProduction in RoboCup Junior
実は部活用に急いでデータベースを確立したいので
結構な速度で目次に投入する必要のありそうな記事を書きたしていたりします。
今日はその中でもPICのコンパイラについてお話ししましょう。
コンパイラについては以前にもあちらこちらで記述しているかと思うのですが、コンパイルは翻訳機なので
C言語を機械語に翻訳してくれます。でも、パソコンに対して使う命令とPICに対して使う命令って勿論違いますよね?
だとしたらそれに応じて翻訳機、つまりコンパイラも変える必要があるのです。
一般的なC言語だと、gccとかccとかborlandが定番ですけど、PICだとどうなるのでしょう。
実はPICの場合、ファミリーごとにコンパイラが分かれています。
つまり、16Fだとこのコンパイラ、24Fだとこのコンパイラ、という風になっているというわけですね。
とりあえず今はうちの部で基本的に使われているコンパイラについて紹介します。
まず最初に紹介するのはHI-TECH C、どっかの会社と同じ名前ですね。
これはMPLABインスト-ルの際についてくるコンパイラです。
PICのコンパイラとしては恐らく一番標準的なもので、大体今のPICなら殆どのPICはこれで対応できるはずです。
現在はPIC10、12、16、18ファミリーまでしか対応していないようです。また、16までと18でも分かれているようです。
只、基本的に定義されている関数がちょっと少なめなので初心者にはちょっととっかかりにくいかもしれません。
このコンパイラでは基本、「レジスタ」というものを直接操作することで命令を行なっていくようになっています。
NXCとかだと、このレジスタに直接触れる機会はなく、基本的に関数を通してレジスタの中身を操作しています。
つまり、元々NXCとかに定義されている関数のほとんど(モーターを回したり、センサーを読んだりするもの)は
このレジスタの操作を関数にまとめたものということになります。
まぁレジスタってなんなんだ!?という話はまた今度にして、とりあえずそういうものだという理解をしておいてください。
Lite版は此方からダウンロードできます。
そして説明するのがMPLAB C Compiler for PIC24 MCUs and dsPIC DSCs。
ちょっと前までC30っていう名前のコンパイラでした。
このコンパイラはMPLAB C というコンパイラの一種でPIC24F、24E、24H、DSPIC30F、33F、専用のコンパイラです。
上で挙げたPICの場合、HI-TECH Cでプログラムを作るよりも、此方で作るほうが楽なので使っています。
追記:今のHI-TECH Cコンパイラは上で挙げたPICは使えないようです。
此方はHI-TECH Cのようにレジスタをあまりいじらなくていいように
NXCみたいに関数が作られている仕様になっているんですけど・・・
このコンパイラの関数は色々と信用がおけないのでやっぱりレジスタをいじったほうがいいと思われます。
これはLite版はフリーコンパイラで、此方の方でダウンロードできます。
最後に紹介するのがMPLAB C Compiler for PIC32 MCUs。
これもMPLAB Cコンパイラの一種です。これはPIC32MX専用となっています。
現在、他に32MX対応のコンパイラが無いのでC言語で32MXをするならこれしかありません。
とりあえず今回紹介したコンパイラの中では一番使える関数が多いというのが特徴でしょうか。
でもわざわざ32MXを使うような人は基本的にPICには精通している人のはずなので、
わざわざ関数を使うようなこともないでしょう。恐らく殆どの人がレジスタで済ましているはずです。
このコンパイラもフリーなので、此方からダウンロードすることができます。
とりあえず今うちで使っているコンパイラは以上3つだと思います。
今回紹介したのは全てMicrochip社の純正のコンパイラですが、他にも色々とコンパイラは存在します。CCSとか・・・。
因みにCCSは事故コンパイラで有名なので余り推奨は致しません。ホントのホントに初心者用ですね。有料だし。
あまり色々させるとあの子はバグります。例えるなら・・・NXT-G的な。
まぁこんな感じでこのようなコンパイラを使ってPICではプログラムを書いていくことになります。
このブログでもこの先、PICによるプログラムを記述する場合があるとは思いますが、
勿論コンパイラによって微妙に命令などが違ってきますので(Microchipのはどれもあんまり変わらないけど・・・)
どのコンパイラのプログラムなのかは注意して頂いた方が宜しいかと思われます。
という訳で今回はコンパイラの話でした。それではまた。
(^・ω・)ノ RadiumProduction in RoboCup Junior
結構な速度で目次に投入する必要のありそうな記事を書きたしていたりします。
今日はその中でもPICのコンパイラについてお話ししましょう。
コンパイラについては以前にもあちらこちらで記述しているかと思うのですが、コンパイルは翻訳機なので
C言語を機械語に翻訳してくれます。でも、パソコンに対して使う命令とPICに対して使う命令って勿論違いますよね?
だとしたらそれに応じて翻訳機、つまりコンパイラも変える必要があるのです。
一般的なC言語だと、gccとかccとかborlandが定番ですけど、PICだとどうなるのでしょう。
実はPICの場合、ファミリーごとにコンパイラが分かれています。
つまり、16Fだとこのコンパイラ、24Fだとこのコンパイラ、という風になっているというわけですね。
とりあえず今はうちの部で基本的に使われているコンパイラについて紹介します。
まず最初に紹介するのはHI-TECH C、どっかの会社と同じ名前ですね。
これはMPLABインスト-ルの際についてくるコンパイラです。
PICのコンパイラとしては恐らく一番標準的なもので、大体今のPICなら殆どのPICはこれで対応できるはずです。
現在はPIC10、12、16、18ファミリーまでしか対応していないようです。また、16までと18でも分かれているようです。
只、基本的に定義されている関数がちょっと少なめなので初心者にはちょっととっかかりにくいかもしれません。
このコンパイラでは基本、「レジスタ」というものを直接操作することで命令を行なっていくようになっています。
NXCとかだと、このレジスタに直接触れる機会はなく、基本的に関数を通してレジスタの中身を操作しています。
つまり、元々NXCとかに定義されている関数のほとんど(モーターを回したり、センサーを読んだりするもの)は
このレジスタの操作を関数にまとめたものということになります。
まぁレジスタってなんなんだ!?という話はまた今度にして、とりあえずそういうものだという理解をしておいてください。
Lite版は此方からダウンロードできます。
そして説明するのがMPLAB C Compiler for PIC24 MCUs and dsPIC DSCs。
ちょっと前までC30っていう名前のコンパイラでした。
このコンパイラはMPLAB C というコンパイラの一種でPIC24F、24E、24H、DSPIC30F、33F、専用のコンパイラです。
上で挙げたPICの場合、HI-TECH Cでプログラムを作るよりも、此方で作るほうが楽なので使っています。
追記:今のHI-TECH Cコンパイラは上で挙げたPICは使えないようです。
此方はHI-TECH Cのようにレジスタをあまりいじらなくていいように
NXCみたいに関数が作られている仕様になっているんですけど・・・
このコンパイラの関数は色々と信用がおけないのでやっぱりレジスタをいじったほうがいいと思われます。
これはLite版はフリーコンパイラで、此方の方でダウンロードできます。
最後に紹介するのがMPLAB C Compiler for PIC32 MCUs。
これもMPLAB Cコンパイラの一種です。これはPIC32MX専用となっています。
現在、他に32MX対応のコンパイラが無いのでC言語で32MXをするならこれしかありません。
とりあえず今回紹介したコンパイラの中では一番使える関数が多いというのが特徴でしょうか。
でもわざわざ32MXを使うような人は基本的にPICには精通している人のはずなので、
わざわざ関数を使うようなこともないでしょう。恐らく殆どの人がレジスタで済ましているはずです。
このコンパイラもフリーなので、此方からダウンロードすることができます。
とりあえず今うちで使っているコンパイラは以上3つだと思います。
今回紹介したのは全てMicrochip社の純正のコンパイラですが、他にも色々とコンパイラは存在します。CCSとか・・・。
因みにCCSは事故コンパイラで有名なので余り推奨は致しません。ホントのホントに初心者用ですね。有料だし。
あまり色々させるとあの子はバグります。例えるなら・・・NXT-G的な。
まぁこんな感じでこのようなコンパイラを使ってPICではプログラムを書いていくことになります。
このブログでもこの先、PICによるプログラムを記述する場合があるとは思いますが、
勿論コンパイラによって微妙に命令などが違ってきますので(Microchipのはどれもあんまり変わらないけど・・・)
どのコンパイラのプログラムなのかは注意して頂いた方が宜しいかと思われます。
という訳で今回はコンパイラの話でした。それではまた。
(^・ω・)ノ RadiumProduction in RoboCup Junior
どうやら日本の研究チームが世界で初めて、レーザー核融合の制御に成功したようです。
この研究に成功したのは静岡県の光産業創成大学院大学で、浜松ホトニクスやトヨタ自動車などとの共同研究だそうです。
レーザーによる核融合はCO2を一切排出しない上に従来の核分裂より放射性廃棄物が極めて少ないことから
クリーンな次世代技術として注目されているとようですが、
発表内容は「連続100回の成功」となっています。
この前あのような事故が起きたばかりですから、まだ実用段階とは言えない実験回数だとは思います。
まぁあの事故は国が津波に対しての対策を怠ったことが原因であって、原発自体の性能には問題はないはずなんですけどね・・・。
そもそも脱原発の流れが世界的に進んでいる中、この発表はどう受け止められるのでしょうねぇ・・・。
でも今だから原発=放射能というイメージがありますが、
今の線量だったら飛行機に乗ったほうがずっと高い放射能浴びますし、
そもそもこういった大学や研究機関にも放射性物質はありますし、高専にも放射能なんたら室ってありますしね。
昔だったら塗材にも使われていましたし、温泉って放射能浴びに行くようなものですし、
結構放射能って身近なはずですよね。
なのに今はちょっと世間がかなり過剰な反応をしてしまっているから風当たりは強いかもしれません。
ニュースでもこの件については聞きませんし、この先この手の研究はどうなってしまうのでしょうね。
(^・ω・)ノ RadiumProduction in RoboCup Junior
この研究に成功したのは静岡県の光産業創成大学院大学で、浜松ホトニクスやトヨタ自動車などとの共同研究だそうです。
レーザーによる核融合はCO2を一切排出しない上に従来の核分裂より放射性廃棄物が極めて少ないことから
クリーンな次世代技術として注目されているとようですが、
発表内容は「連続100回の成功」となっています。
この前あのような事故が起きたばかりですから、まだ実用段階とは言えない実験回数だとは思います。
まぁあの事故は国が津波に対しての対策を怠ったことが原因であって、原発自体の性能には問題はないはずなんですけどね・・・。
そもそも脱原発の流れが世界的に進んでいる中、この発表はどう受け止められるのでしょうねぇ・・・。
でも今だから原発=放射能というイメージがありますが、
今の線量だったら飛行機に乗ったほうがずっと高い放射能浴びますし、
そもそもこういった大学や研究機関にも放射性物質はありますし、高専にも放射能なんたら室ってありますしね。
昔だったら塗材にも使われていましたし、温泉って放射能浴びに行くようなものですし、
結構放射能って身近なはずですよね。
なのに今はちょっと世間がかなり過剰な反応をしてしまっているから風当たりは強いかもしれません。
ニュースでもこの件については聞きませんし、この先この手の研究はどうなってしまうのでしょうね。
(^・ω・)ノ RadiumProduction in RoboCup Junior
という訳で今日は平成24年度第一回部室の掃除を行いました。
今日はフィールドの清掃とレゴブロックの仕分けを行いました。あれ?部室の掃除してない・・・。
と言っても僕は定期券購入の為途中離脱したので終わったのかどうかはわかりません。
結構レゴの箱を借りていたのでちゃんと終わったかどうか・・・。
まぁそんなことを一年生がしている間に、なんと僕は一人違うことをしていました。
まずは本年度の会計書類の作成。といっても収入がほぼ皆無なので2行で終わりましたけど。
そして今年度の産技祭の予定の草案の作成。今年もなんか売るっぽい流れになっています。
去年よりかは売れるように頑張りたいですね。去年はギリギリ黒字だったので・・・
モノも去年よりかはまともなものを売るつもりなので宜しくお願い致します。
まぁこのままの流れで行くと、去年とは段違いのものを売ることになりそうですけど・・・。
そして一番堪えたのが回路部品の整理。
今部室にある回路部品の約○○割は僕の私物だったりしますので部室の回路部品の整理=私物整理なのですが・・・。
正直言って、多すぎる。部員からは「わーここに秋月があるー」なんて言われてしまいました。
まぁ確かに、ロボカップで使いそうな回路部品は大抵買っちゃっていますけど・・・。
だって安いから・・・仕方ないです。
でも、揃えてから一度もまともに整理したことがなかったので、正直何が何処にあるのやら・・・。
かなりまずい状態になっていました。
なのでこれを機に整理をしてみたのですが、というより試みたのですが・・・
ムリ(笑)
あっけなく定期券購入の時間がやってきてしまったので明後日以降に持ち越しとなってしまいました。
まず、秋月の袋を開けると、どんどん同じ抵抗の袋が出てくる・・・。鬱々真っ盛り状態でした。
しかも意味不明なくらい28ピンのピンソケットが見つかるし・・・フォトカプラは5個単位でどんどん湧いて出てくるし・・・
挙句の果てには水銀スイッチが奥のほうからわしゃわしゃ出てきました。
・・・。一年前に整理しとけばよかった・・・。
という訳で皆さん、回路素子の整理はしっかりとしたほうがいいですよ。という忠告をさせて頂きます(笑)
因みにこれを機に僕はExcelで物品管理を行なうことにしました。ロボコン時代の知恵ですね。
でもよく考えると部室だけじゃなくて家にも同じくらい未整理の回路部品ってあったような・・・。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今日はフィールドの清掃とレゴブロックの仕分けを行いました。あれ?部室の掃除してない・・・。
と言っても僕は定期券購入の為途中離脱したので終わったのかどうかはわかりません。
結構レゴの箱を借りていたのでちゃんと終わったかどうか・・・。
まぁそんなことを一年生がしている間に、なんと僕は一人違うことをしていました。
まずは本年度の会計書類の作成。といっても収入がほぼ皆無なので2行で終わりましたけど。
そして今年度の産技祭の予定の草案の作成。今年もなんか売るっぽい流れになっています。
去年よりかは売れるように頑張りたいですね。去年はギリギリ黒字だったので・・・
モノも去年よりかはまともなものを売るつもりなので宜しくお願い致します。
まぁこのままの流れで行くと、去年とは段違いのものを売ることになりそうですけど・・・。
そして一番堪えたのが回路部品の整理。
今部室にある回路部品の約○○割は僕の私物だったりしますので部室の回路部品の整理=私物整理なのですが・・・。
正直言って、多すぎる。部員からは「わーここに秋月があるー」なんて言われてしまいました。
まぁ確かに、ロボカップで使いそうな回路部品は大抵買っちゃっていますけど・・・。
だって安いから・・・仕方ないです。
でも、揃えてから一度もまともに整理したことがなかったので、正直何が何処にあるのやら・・・。
かなりまずい状態になっていました。
なのでこれを機に整理をしてみたのですが、というより試みたのですが・・・
ムリ(笑)
あっけなく定期券購入の時間がやってきてしまったので明後日以降に持ち越しとなってしまいました。
まず、秋月の袋を開けると、どんどん同じ抵抗の袋が出てくる・・・。鬱々真っ盛り状態でした。
しかも意味不明なくらい28ピンのピンソケットが見つかるし・・・フォトカプラは5個単位でどんどん湧いて出てくるし・・・
挙句の果てには水銀スイッチが奥のほうからわしゃわしゃ出てきました。
・・・。一年前に整理しとけばよかった・・・。
という訳で皆さん、回路素子の整理はしっかりとしたほうがいいですよ。という忠告をさせて頂きます(笑)
因みにこれを機に僕はExcelで物品管理を行なうことにしました。ロボコン時代の知恵ですね。
でもよく考えると部室だけじゃなくて家にも同じくらい未整理の回路部品ってあったような・・・。
(^・ω・)ノ RadiumProduction in RoboCup Junior
先程、らじぷろの目次が完成しました。
まぁ目次といっても全ての記事に対しての目次ではなく、
ロボカップの説明の記事
回路系の説明の記事
PICの説明の記事
C言語の説明の記事
現在この4つについての目次をまとめたものを表示しています。
レゴのセンサーに関してはカテゴリー内に別途分けてありますので、ここでは今のところ整理していません。
NXT等のLEGOに関しては要望があり次第という形になります。
目次の場所ですが、リンクとアクセスカウンターの間
ここになります。大体最新記事のタイトルがある辺りになりますね。
クリックして頂けると中が見れますので、そこから見たいページを選んでクリックして下さい。
意外と30分ほどでできましたね。結構エラー吐いたけど・・・。
やっぱりJavascriptは面倒です。
それではまた。トップページも更新しなきゃ。
(^・ω・)ノ RadiumProduction in RoboCup Junior
まぁ目次といっても全ての記事に対しての目次ではなく、
ロボカップの説明の記事
回路系の説明の記事
PICの説明の記事
C言語の説明の記事
現在この4つについての目次をまとめたものを表示しています。
レゴのセンサーに関してはカテゴリー内に別途分けてありますので、ここでは今のところ整理していません。
NXT等のLEGOに関しては要望があり次第という形になります。
目次の場所ですが、リンクとアクセスカウンターの間
ここになります。大体最新記事のタイトルがある辺りになりますね。
クリックして頂けると中が見れますので、そこから見たいページを選んでクリックして下さい。
意外と30分ほどでできましたね。結構エラー吐いたけど・・・。
やっぱりJavascriptは面倒です。
それではまた。トップページも更新しなきゃ。
(^・ω・)ノ RadiumProduction in RoboCup Junior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
(01/01)
(05/07)
(01/11)
プロフィール
HN:
Luz
性別:
男性
アーカイブ