RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
ロボカップジュニアのレスキューにおいて、一番最初に現れるであろう課題がライントレースというものです。
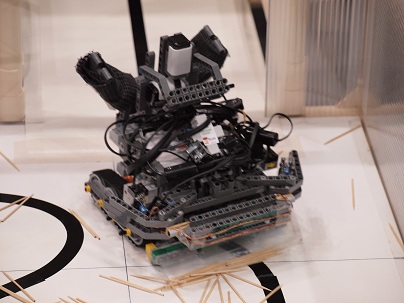
ライントレースとは、床に描かれたラインをロボットが辿る(トレースする)動作のことで、工場のライン等に使われています。
基本的にはロボットの下部にラインセンサーと呼ばれるセンサーを搭載して、
そのセンサーからの情報を元にロボットの動作を決定するような仕組みです。
ラインセンサーにはよく、赤外線の反射型の光センサーが使われます。
これは、センサーから光を放出し、床に反射した反射光の量を測定するセンサーです。
反射光の量から床の色の明暗がわかりますので、だいたの色を把握することができます。
しかし、モノクロにした際に色の違いがわからないような色同士だと、やっぱり区別がつきません。
という訳なので、ライントレースを行わせる際にはラインの色と床の色の明暗をはっきりとさせる必要があります。
ロボカップの場合はラインの色が黒、床の色が白となっています。
これをロボットにトレースさせて、競技を進行していく訳です。
ロボットによってセンサーの数は様々で、
1個でライントレースするロボットもいれば、10個以上使用するロボットも存在します。前に作ったロボットだと12個あったっけかなぁ。
また、LEGOだと赤外線ではなく、普通の赤色LEDを使用していますね。
以上がライントレースの簡単な紹介です。
簡単なので、特に課題とするまでもなさそうですが、これにギャップやら串やらが加わると難しくなってきます。
そもそも、これが出来れば一階はほぼ完璧ということになりますので、
ノード大会くらいならこれだけで突破できるのではないでしょうか(笑)
まぁ今ロボカップ自体のレベルはどんどん下降傾向にありますから、
この辺りができていればまぁなんとかなるのではないでしょうか。
という訳で今回の記事はこの辺で。
(^・ω・)ノ RadiumProduction in RoboCup Junior
ライントレースとは、床に描かれたラインをロボットが辿る(トレースする)動作のことで、工場のライン等に使われています。
基本的にはロボットの下部にラインセンサーと呼ばれるセンサーを搭載して、
そのセンサーからの情報を元にロボットの動作を決定するような仕組みです。
ラインセンサーにはよく、赤外線の反射型の光センサーが使われます。
これは、センサーから光を放出し、床に反射した反射光の量を測定するセンサーです。
反射光の量から床の色の明暗がわかりますので、だいたの色を把握することができます。
しかし、モノクロにした際に色の違いがわからないような色同士だと、やっぱり区別がつきません。
という訳なので、ライントレースを行わせる際にはラインの色と床の色の明暗をはっきりとさせる必要があります。
ロボカップの場合はラインの色が黒、床の色が白となっています。
これをロボットにトレースさせて、競技を進行していく訳です。
ロボットによってセンサーの数は様々で、
1個でライントレースするロボットもいれば、10個以上使用するロボットも存在します。前に作ったロボットだと12個あったっけかなぁ。
また、LEGOだと赤外線ではなく、普通の赤色LEDを使用していますね。
以上がライントレースの簡単な紹介です。
簡単なので、特に課題とするまでもなさそうですが、これにギャップやら串やらが加わると難しくなってきます。
そもそも、これが出来れば一階はほぼ完璧ということになりますので、
ノード大会くらいならこれだけで突破できるのではないでしょうか(笑)
まぁ今ロボカップ自体のレベルはどんどん下降傾向にありますから、
この辺りができていればまぁなんとかなるのではないでしょうか。
という訳で今回の記事はこの辺で。
(^・ω・)ノ RadiumProduction in RoboCup Junior
Comments
※コメントは内容確認後に手動で公開するようにしております。反映までしばらくお待ちください。
※コメントは内容確認後に手動で公開するようにしております。反映までしばらくお待ちください。
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ