RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
今年度、うちの部活で完全封印したソフトがあります。
その名はROBOLAB。さて、どういったソフトなのでしょう。
まず、起動してみます。
まずこんな画面がでます。この画面の出ている時間はPCのスペックに反比例しています。
つまりこの画面の出ている時間で自分のPCのスペックがわかるという、
素晴らしい機能がまず最初に作動するという訳です。
特に意味はありませんが。
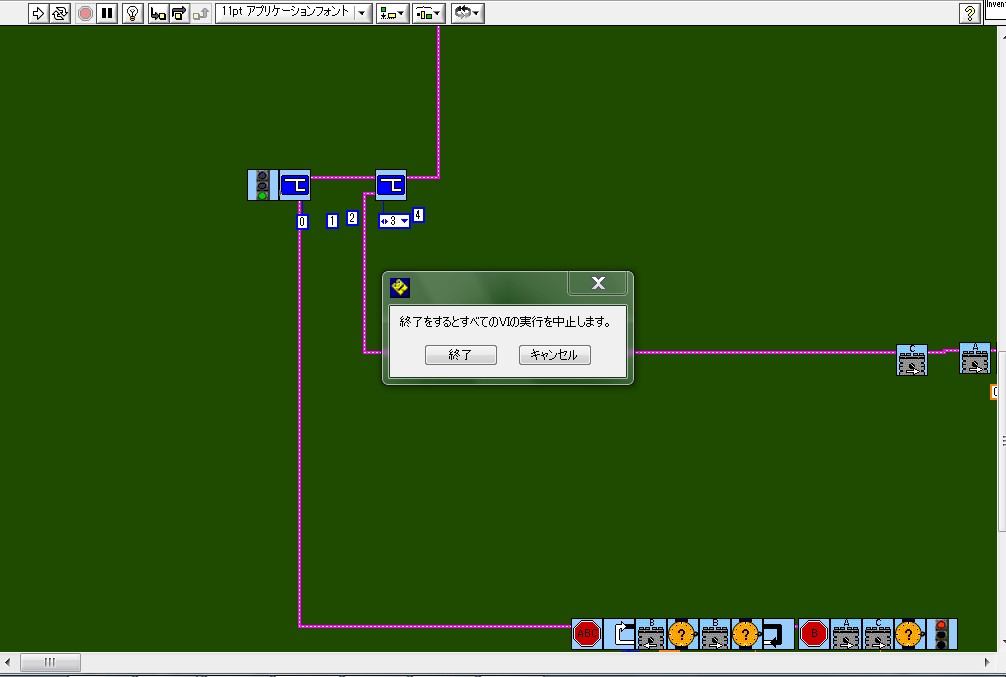
そしてこれが終わるとこんな画面に。
ここで右下の終了を押すと
このように表示されてここで「終了」を押すと、RABOLABが終了します。
これがあらかたのROBOLABソフトウェアの使い方は説明したかと思います。
・・・と部活の講習ではこういった感じの説明をしてROBOLABについては一切話さない予定なのですが・・・
これではROBOLABを作ったタフツ大学とNational Instruments 社に怒られそうなので続きの説明を行います。
まずさっきの画面でプログラマを選択します。
それでこの画面に、因みにファームを入れる際にはアドミニストレーターを開いてください。
それでパイロット1からインベンタ4までで使いたい環境を設定します。
パイロットは本当に最初の最初、最小限のことしかできないのであまりお勧めしません。
1から4の数字はなにが違うかというと、使えるプログラムの命令の種類が違います。
数字が大きい方が多いです。
という訳で、ここでは一番大きなインベンタ4を動かしてみます。
とりあえずはこんな感じになります。
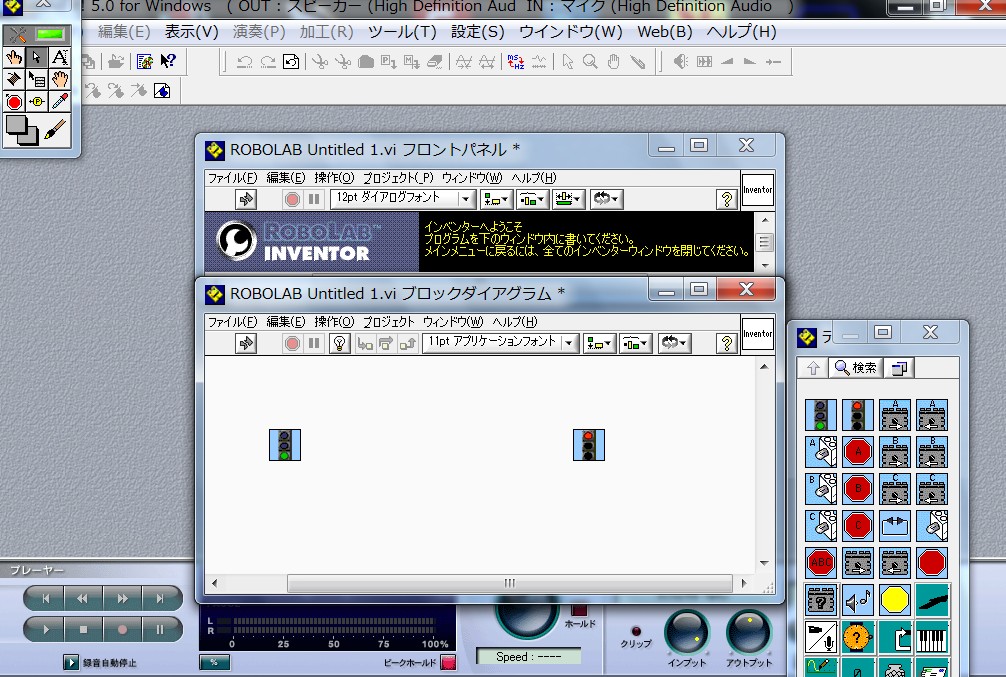
右下にあるパレットから命令を引っ張り出して真ん中の白いところに置いて、
それをピンクの線でつないでプログラムするという仕組みです。
例えば、単純にロボットを一秒間前進させて停止させるプログラムだと、
こんな感じです。青信号がプログラムの開始、赤信号がプログラムの終了を意味しています。
その中で灰色のモーターっぽいやつがモーターを動かす命令です。
ここではAモーターとCモーターを駆動させることを別々に命令しています。
その次の黄色い時計みたいなものが、時間待ちの指定です。これは一秒待ちの命令なので、
A,Cモーターを駆動させたまま、1秒間その状態を保持するという命令です。
最後の真赤な丸がモーター停止の命令。これをいれることで1秒たった後でモーターは停止します。
まぁこのような感じでプログラムを作っていきます。
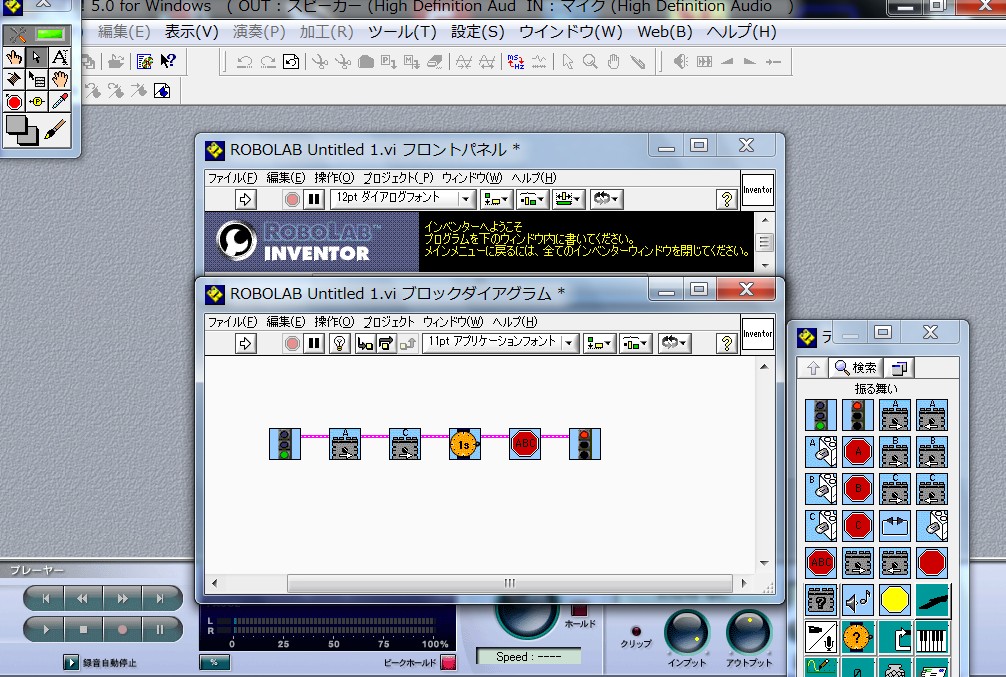
そのパターンで作られたレスキューのプログラムが此方。
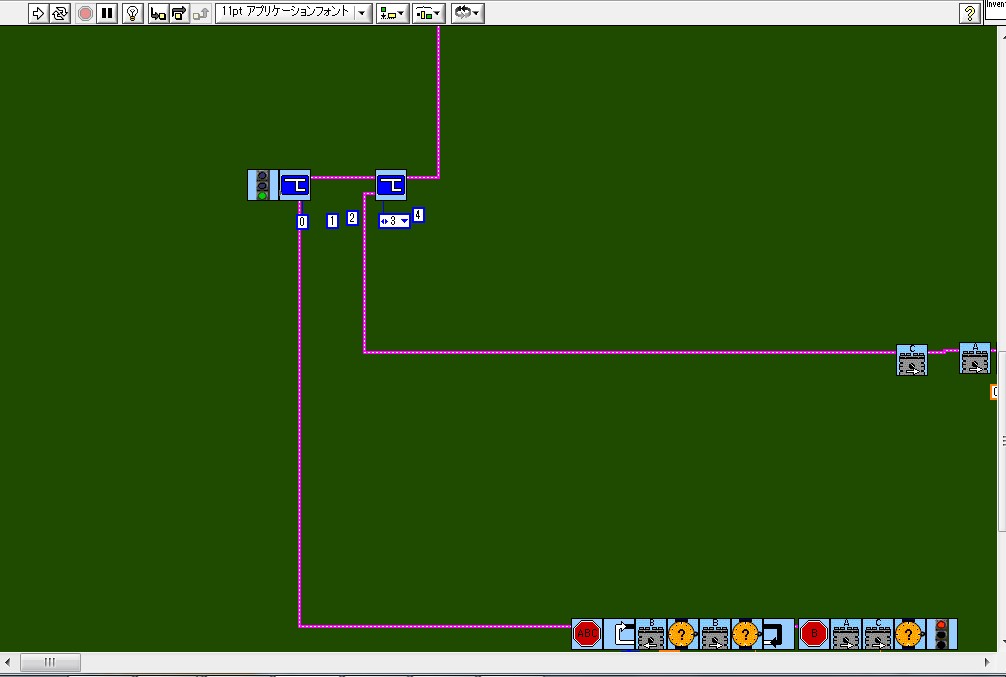
殆どなんにも無いように見えますが、下のタスクバーを見てください。
プログラムが巨大すぎて、全然画面に収まり切っていないのです。
この時のプログラムは4Mbyteほどいったでしょうか。RCXにダウンロードできるギリギリのサイズのプログラムでした。
当時だとROBOLABでこれだけのサイズというのは他に見たことがないですね・・・悪い例の一つということで・・・
このような感じでROBOLABではプログラムを作っていきます。
またプログラムを開いた状態からROBOLABを終了させる際にはCtrl+Qを使います。
すると、まずこのような画面が出て、
ここで終了を押すとこうなって
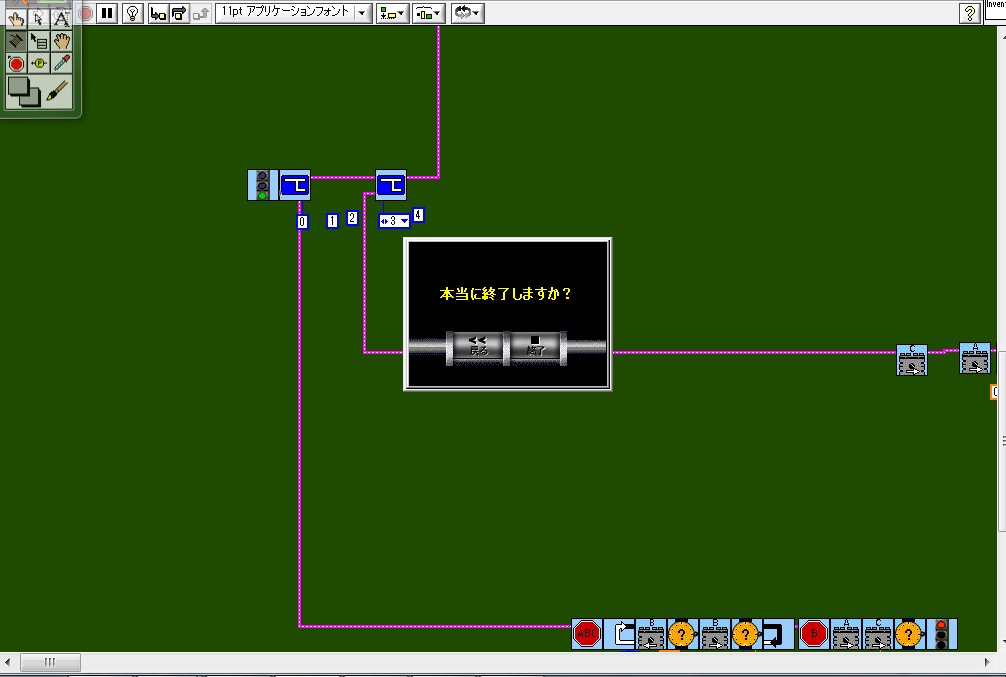
ここで終了を押すと勝手に終了します。
プログラムの変更が保存されていないと、保存の確認はちゃんと聞いてくれるのでその辺りの心配はいりません。
とまぁこれで簡単な説明は終了です、命令の説明とかはROBOLABのヘルプがやってくれるので省略します。
こんな風に便利なROBOLABですが、プログラムが複雑になると意味不明になる上、
どうにも容量を食うのでうちの部活では封印しました。
うちの部活ではこれの代わりにNQCというものを採用しています。
まぁ時間があればこちらの説明もいつか行おうと考えています、
それでは。
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s
よく、ROBORAB とかROBOLABOとか、酷い時にはROBORABOと間違われることがあるそうです。
その名はROBOLAB。さて、どういったソフトなのでしょう。
まず、起動してみます。
まずこんな画面がでます。この画面の出ている時間はPCのスペックに反比例しています。
つまりこの画面の出ている時間で自分のPCのスペックがわかるという、
素晴らしい機能がまず最初に作動するという訳です。
特に意味はありませんが。
そしてこれが終わるとこんな画面に。
ここで右下の終了を押すと
このように表示されてここで「終了」を押すと、RABOLABが終了します。
これがあらかたのROBOLABソフトウェアの使い方は説明したかと思います。
・・・と部活の講習ではこういった感じの説明をしてROBOLABについては一切話さない予定なのですが・・・
これではROBOLABを作ったタフツ大学とNational Instruments 社に怒られそうなので続きの説明を行います。
まずさっきの画面でプログラマを選択します。
それでこの画面に、因みにファームを入れる際にはアドミニストレーターを開いてください。
それでパイロット1からインベンタ4までで使いたい環境を設定します。
パイロットは本当に最初の最初、最小限のことしかできないのであまりお勧めしません。
1から4の数字はなにが違うかというと、使えるプログラムの命令の種類が違います。
数字が大きい方が多いです。
という訳で、ここでは一番大きなインベンタ4を動かしてみます。
とりあえずはこんな感じになります。
右下にあるパレットから命令を引っ張り出して真ん中の白いところに置いて、
それをピンクの線でつないでプログラムするという仕組みです。
例えば、単純にロボットを一秒間前進させて停止させるプログラムだと、
こんな感じです。青信号がプログラムの開始、赤信号がプログラムの終了を意味しています。
その中で灰色のモーターっぽいやつがモーターを動かす命令です。
ここではAモーターとCモーターを駆動させることを別々に命令しています。
その次の黄色い時計みたいなものが、時間待ちの指定です。これは一秒待ちの命令なので、
A,Cモーターを駆動させたまま、1秒間その状態を保持するという命令です。
最後の真赤な丸がモーター停止の命令。これをいれることで1秒たった後でモーターは停止します。
まぁこのような感じでプログラムを作っていきます。
そのパターンで作られたレスキューのプログラムが此方。
殆どなんにも無いように見えますが、下のタスクバーを見てください。
プログラムが巨大すぎて、全然画面に収まり切っていないのです。
この時のプログラムは4Mbyteほどいったでしょうか。RCXにダウンロードできるギリギリのサイズのプログラムでした。
当時だとROBOLABでこれだけのサイズというのは他に見たことがないですね・・・悪い例の一つということで・・・
このような感じでROBOLABではプログラムを作っていきます。
またプログラムを開いた状態からROBOLABを終了させる際にはCtrl+Qを使います。
すると、まずこのような画面が出て、
ここで終了を押すとこうなって
ここで終了を押すと勝手に終了します。
プログラムの変更が保存されていないと、保存の確認はちゃんと聞いてくれるのでその辺りの心配はいりません。
とまぁこれで簡単な説明は終了です、命令の説明とかはROBOLABのヘルプがやってくれるので省略します。
こんな風に便利なROBOLABですが、プログラムが複雑になると意味不明になる上、
どうにも容量を食うのでうちの部活では封印しました。
うちの部活ではこれの代わりにNQCというものを採用しています。
まぁ時間があればこちらの説明もいつか行おうと考えています、
それでは。
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s
よく、ROBORAB とかROBOLABOとか、酷い時にはROBORABOと間違われることがあるそうです。
プログラムの記事の続きです。
前回は文字の出力の仕方について記載したかと思います。
今度は逆に文字を入力するときについて記載しようと思います。
入力した文字(一文字)を出力するプログラムはこんな感じ
#include <stdio.h>
int main(void)
{
char s;
printf("文字を入力してください。");
scanf("%c",&s);
printf("入力された文字は%cです。",s);
return 0;
}
数字だとこんな感じになります。
#include <stdio.h>
int main(void)
{
int x;
printf("数字を入力してください。");
scanf("%d",&x);
printf("入力された数字は%dです。",x);
return 0;
}
とまぁこのようなプログラムになります。数字の時はint型を、
文字の時はchar型を使っている。ただそれだけの違いですね。
それで大体感じで分かるとは思いますが、このプログラムはどちらも入力された値を変数に入れて、
そのままprintfで出力するというものです。
プログラムを実行して、キーボードで文字や数字(文字の場合は一文字のみ)を入力すると、
その入力した文字が表示されるというものですね。
pirntfがわからなければこちらの記事を参照ください。
このプログラムで値の入力を行っているのが、6行目のscanfという文です。
文の書き方はprintfに似ていますね。括弧があって、””でくくわれていて・・・
一般的なscanf文の書き方はこのようになっています
scanf("変換指定文字",&値を入れたい変数名);
この変換指定文字というのがprintfでもでてきた%dや%cのことです。
int型の整数のときには%dを、char型の文字の時には%cを使います。
またfloat型やdouble型の時は一般的に、%fを使います。指数表示させたい時は%eになります。
値を入れたい変数名とはそのままの意味です。上のプログラムだとsとかxになります。
ここで重要なのが、printf文の時はカンマの後にすぐ変数名になりましたが、
scanf文の場合は、カンマと変数名の間に&が入ります。
なぜこれが必要かという話はアドレスというものを理解しなくてはなりません。
その話はこのペースだとだいぶ先になるので、今はこういうものだと割り切ってください(笑)
まぁこのような感じでscanf文は使います。
次のProgram記事ではscanf文のもうちょっと発展した使い方を紹介します。
それでは
(^・ω・)ノRadiumProduction in RoboCup Junior
前回は文字の出力の仕方について記載したかと思います。
今度は逆に文字を入力するときについて記載しようと思います。
入力した文字(一文字)を出力するプログラムはこんな感じ
#include <stdio.h>
int main(void)
{
char s;
printf("文字を入力してください。");
scanf("%c",&s);
printf("入力された文字は%cです。",s);
return 0;
}
数字だとこんな感じになります。
#include <stdio.h>
int main(void)
{
int x;
printf("数字を入力してください。");
scanf("%d",&x);
printf("入力された数字は%dです。",x);
return 0;
}
とまぁこのようなプログラムになります。数字の時はint型を、
文字の時はchar型を使っている。ただそれだけの違いですね。
それで大体感じで分かるとは思いますが、このプログラムはどちらも入力された値を変数に入れて、
そのままprintfで出力するというものです。
プログラムを実行して、キーボードで文字や数字(文字の場合は一文字のみ)を入力すると、
その入力した文字が表示されるというものですね。
pirntfがわからなければこちらの記事を参照ください。
このプログラムで値の入力を行っているのが、6行目のscanfという文です。
文の書き方はprintfに似ていますね。括弧があって、””でくくわれていて・・・
一般的なscanf文の書き方はこのようになっています
scanf("変換指定文字",&値を入れたい変数名);
この変換指定文字というのがprintfでもでてきた%dや%cのことです。
int型の整数のときには%dを、char型の文字の時には%cを使います。
またfloat型やdouble型の時は一般的に、%fを使います。指数表示させたい時は%eになります。
値を入れたい変数名とはそのままの意味です。上のプログラムだとsとかxになります。
ここで重要なのが、printf文の時はカンマの後にすぐ変数名になりましたが、
scanf文の場合は、カンマと変数名の間に&が入ります。
なぜこれが必要かという話はアドレスというものを理解しなくてはなりません。
その話はこのペースだとだいぶ先になるので、今はこういうものだと割り切ってください(笑)
まぁこのような感じでscanf文は使います。
次のProgram記事ではscanf文のもうちょっと発展した使い方を紹介します。
それでは
(^・ω・)ノRadiumProduction in RoboCup Junior
予告通り、総書記様と秋葉の方に凱旋に行って参りました。今週3回目(笑)
とりあえず今日の目的は電気工事士の実技試験の材料の購入と、PIC講習の第一回目です。
副部長もソフトを買うということだったので、途中まで3人で行くことに。
まぁ駅で副部長とは別れる訳ですけど・・・。
そしでまず向かったのが、実技試験の材料購入です。これが大きな間違いだったね。
まぁ3度目の正直を目指して正直焦っていたんですね。それがこのような惨劇を生むなんて・・・予想外でした。
その惨劇の内容というのが・・・
材料、重い(笑)
7㎏ほどあったでしょうか。無茶苦茶に重いです。
これをもってこれからのPIC講習基、部品の買い出しに行くのか・・・。
何度帰りたいと言ったことか。でも、もう後の祭りです。
とりあえず秋月と千石に行って適当に買い揃えました。
買ったものは・・・PK2とPICと回路部品と・・・みたいな感じです。
また、色々議論を重ねた結果、今回の講習で扱うPICが、24FシリーズのJ64GA002に決まりました。

アナログの数とかが要因ですかね。あと動作速度とか、値段とか。
まぁとにかくこれでやっていきますよ。爆発しない程度に・・・
そんな感じで時間が過ぎ、遊びで寄ったツクモのロボットショップを出た時には6時を過ぎていました。
そしてその後、時間が余ったので、テクノロジアに行ってみたら・・・
orz
という訳で第一回目の講習は回路部品の購入で終了しました。
次は・・・PICについて・・・かなぁ?それとも電源に走るかも。まだ未定ですね(笑)
とりあえずリアルの講習の内容はそのままこっちの記事にしていこうかなー。なんて考えている次第です。
なので、記事見てたらいつの間にかPICができるように・・・!みたいな記事が書けると・・・いいな。
まぁそのような感じで講習はやっていこうと思っています。
それでは今日はこの辺で。
そういえば今日、UDXの前でこれが踊ってました。

帰ったらニュースになってたなぁ。なんだったんだろう。
(^・ω・)ノRadiumProduction in RoboCupJunior
とりあえず今日の目的は電気工事士の実技試験の材料の購入と、PIC講習の第一回目です。
副部長もソフトを買うということだったので、途中まで3人で行くことに。
まぁ駅で副部長とは別れる訳ですけど・・・。
そしでまず向かったのが、実技試験の材料購入です。これが大きな間違いだったね。
まぁ3度目の正直を目指して正直焦っていたんですね。それがこのような惨劇を生むなんて・・・予想外でした。
その惨劇の内容というのが・・・
材料、重い(笑)
7㎏ほどあったでしょうか。無茶苦茶に重いです。
これをもってこれからのPIC講習基、部品の買い出しに行くのか・・・。
何度帰りたいと言ったことか。でも、もう後の祭りです。
とりあえず秋月と千石に行って適当に買い揃えました。
買ったものは・・・PK2とPICと回路部品と・・・みたいな感じです。
また、色々議論を重ねた結果、今回の講習で扱うPICが、24FシリーズのJ64GA002に決まりました。
アナログの数とかが要因ですかね。あと動作速度とか、値段とか。
まぁとにかくこれでやっていきますよ。爆発しない程度に・・・
そんな感じで時間が過ぎ、遊びで寄ったツクモのロボットショップを出た時には6時を過ぎていました。
そしてその後、時間が余ったので、テクノロジアに行ってみたら・・・
orz
という訳で第一回目の講習は回路部品の購入で終了しました。
次は・・・PICについて・・・かなぁ?それとも電源に走るかも。まだ未定ですね(笑)
とりあえずリアルの講習の内容はそのままこっちの記事にしていこうかなー。なんて考えている次第です。
なので、記事見てたらいつの間にかPICができるように・・・!みたいな記事が書けると・・・いいな。
まぁそのような感じで講習はやっていこうと思っています。
それでは今日はこの辺で。
そういえば今日、UDXの前でこれが踊ってました。
帰ったらニュースになってたなぁ。なんだったんだろう。
(^・ω・)ノRadiumProduction in RoboCupJunior
今年も暑いです。
特に今年はうちの学校は冷房が止まっているので 死ねるような暑さです。
まぁこういう季節がやってきたということですね。
と。いうことは・・・今年も・・・
サマーチャレンジ・・・やるんですね(笑)ルールが発表されていました。
今年はどうも、次年度の大会が近いこともあってか、
今までの鬼畜ワンワン(満点が絶対に出ないといわれている)は初心者用競技ということになっていて、
中、上級者はロボカップジュニアのサッカー、レスキューの競技をオマージュしたような競技をする。という風に、
競技を合計で3つに分けられているのが大きな特徴でしょうか。というよりこれからはこのスタンスで行くのかな?
会場はいつも通りうちの高専の中央ホールです。日付は8月の28日、8月の最後の日曜日ですね。
なんかレスキューはシンガポール世界大会で行われたレスキューCのような競技を行うようです。
なかなか面白そうだけど、うーん。今年のトゥルースのレスキューの競技結果を見るとなぁ・・・
レスキュー、やっちゃっていいのかなぁ(笑)
まぁ練習競技会ですし、細かいことは気にしないことにしましょう。
とりあえず暇なときにでもルールの解析でもしようかな・・・でも暇なときないか(笑)
それでは
(^・ω・)ノRadiumProduction in RoboCupJunior
特に今年はうちの学校は冷房が止まっているので 死ねるような暑さです。
まぁこういう季節がやってきたということですね。
と。いうことは・・・今年も・・・
サマーチャレンジ・・・やるんですね(笑)ルールが発表されていました。
今年はどうも、次年度の大会が近いこともあってか、
今までの鬼畜ワンワン(満点が絶対に出ないといわれている)は初心者用競技ということになっていて、
中、上級者はロボカップジュニアのサッカー、レスキューの競技をオマージュしたような競技をする。という風に、
競技を合計で3つに分けられているのが大きな特徴でしょうか。というよりこれからはこのスタンスで行くのかな?
会場はいつも通りうちの高専の中央ホールです。日付は8月の28日、8月の最後の日曜日ですね。
なんかレスキューはシンガポール世界大会で行われたレスキューCのような競技を行うようです。
なかなか面白そうだけど、うーん。今年のトゥルースのレスキューの競技結果を見るとなぁ・・・
レスキュー、やっちゃっていいのかなぁ(笑)
まぁ練習競技会ですし、細かいことは気にしないことにしましょう。
とりあえず暇なときにでもルールの解析でもしようかな・・・でも暇なときないか(笑)
それでは
(^・ω・)ノRadiumProduction in RoboCupJunior
まさか2があるなんて(笑)
今日はRCXのボタンの説明でもしたいと思います。

RCXはこのように液晶の4隅に赤、緑、黒、灰の4つのボタンがついています。
まぁボタンの上に書いてあるのでわかるとは思いますが、赤いのが電源ボタンです。このボタンを押すと電源が入ります。
んで電源が入るとこんな画面が出てきます。

真ん中の数字はロボットの電源が入ってからの時間を示しています、
秒単位だったり、分単位だったりしますが、それはファームウェアによって違います。
また、この数字が表示されていない場合はファームが入っていない状態を指します。
NXTと違ってファームがなくても電源は入るので注意してください。
そんで数字の右に、人のような何かがいると思います。これがプログラムの実行の有無を示しています。
プログラムが動いていないときは静止していますが、プログラムを実行すると、足踏みをしだします。
それでその隣の数字が現在のプログラム番号を指しています。なので写真だと3番ですね。
RCXはNXTと違い、5個しかプログラムを入れることができません。
そしてそれはそれぞれ、プログラム番号1番から5番という感じで割り当てられます。
何番にプログラムを入れるかはプログラムのダウンロードの時に決めることができます。
普通は1番2番がロックされていますが、ロックを解除すれば入れることができます。
このプログラム番号は灰色のボタンを押して変更することができます。
また、プログラムの実行、停止は緑のボタンです。押すと現在表示されているプログラム番号のプログラムを実行します。
まぁこれは簡単ですね。押すだけですから。
最後に黒のボタン、これは、センサーの値とモーターのパワーを表示します。
只、一個ずつしか表示ができません。一回押すと1のセンサー、また押すと、2のセンサー
また押すと3のセンサー、Aモーター、Bモーター、Cモーターと変わっていきます。
ぶっちゃけモーターに関しては実用性が皆無です。
とりあえずはこの辺でしょうか。あと、RCXのプログラムメモリがいっぱいになると
ピザマークとか言われている謎のべイル↓的な物が画面上に出てきます。

まぁこの状態でも問題はないですが、重いプログラムとかが入らなくなる恐れがあるので、
時間があるときにでも、ファームウェアを再インストールなどをして消しておくといいでしょう。
まぁとりあえず今日の説明はこの辺で
ではーノ
(^・ω・)ノRadiumProduction in RoboCupJunior
今日はRCXのボタンの説明でもしたいと思います。
RCXはこのように液晶の4隅に赤、緑、黒、灰の4つのボタンがついています。
まぁボタンの上に書いてあるのでわかるとは思いますが、赤いのが電源ボタンです。このボタンを押すと電源が入ります。
んで電源が入るとこんな画面が出てきます。
真ん中の数字はロボットの電源が入ってからの時間を示しています、
秒単位だったり、分単位だったりしますが、それはファームウェアによって違います。
また、この数字が表示されていない場合はファームが入っていない状態を指します。
NXTと違ってファームがなくても電源は入るので注意してください。
そんで数字の右に、人のような何かがいると思います。これがプログラムの実行の有無を示しています。
プログラムが動いていないときは静止していますが、プログラムを実行すると、足踏みをしだします。
それでその隣の数字が現在のプログラム番号を指しています。なので写真だと3番ですね。
RCXはNXTと違い、5個しかプログラムを入れることができません。
そしてそれはそれぞれ、プログラム番号1番から5番という感じで割り当てられます。
何番にプログラムを入れるかはプログラムのダウンロードの時に決めることができます。
普通は1番2番がロックされていますが、ロックを解除すれば入れることができます。
このプログラム番号は灰色のボタンを押して変更することができます。
また、プログラムの実行、停止は緑のボタンです。押すと現在表示されているプログラム番号のプログラムを実行します。
まぁこれは簡単ですね。押すだけですから。
最後に黒のボタン、これは、センサーの値とモーターのパワーを表示します。
只、一個ずつしか表示ができません。一回押すと1のセンサー、また押すと、2のセンサー
また押すと3のセンサー、Aモーター、Bモーター、Cモーターと変わっていきます。
ぶっちゃけモーターに関しては実用性が皆無です。
とりあえずはこの辺でしょうか。あと、RCXのプログラムメモリがいっぱいになると
ピザマークとか言われている謎のべイル↓的な物が画面上に出てきます。
まぁこの状態でも問題はないですが、重いプログラムとかが入らなくなる恐れがあるので、
時間があるときにでも、ファームウェアを再インストールなどをして消しておくといいでしょう。
まぁとりあえず今日の説明はこの辺で
ではーノ
(^・ω・)ノRadiumProduction in RoboCupJunior
決断が午後6時。既に秋月↓が閉まっている時間のことでした。

「秋葉に行こう」
という話になって、総書記様を連れていって来ました。
というのも、本来の目的は
電気工事士の筆記試験が、どうにも受かったっぽいので実技試験の教材を買いに行く。というものでした。

日曜に行ったら定休日だったので・・・(笑)
そしたらなんか、こんな秋葉ツアーをすることに・・・何故・・・?
まぁこの際そのことはどうでもいいや。
電車を乗り継いで、秋葉につきました。
とりあえずまず、電気工事士の教材部品を買うことにしたのですが、店内に入ってあることに気が付きました。
財布の中身は2千円。
電気工事士試験の教材の価格は1万円。
「・・・。さて、秋葉ツアー行こうか。」
とりあえずまずはヒロセにいって、そこから千石3件、そして閉まっている秋月と回りました。
そしてここで発見したことがひとつ。
いつの間にか、秋月の営業時間が18:30までに伸びていて、月木が定休日になっているという事態。
結構これは大きいぞ・・・気が付いてよかった。
でもその時、これがこの日唯一の収穫になることを、この時の僕達は知りも・・・いや薄々感づいてはいたかな。
そしてそこから秋月近くのマルツに行って、PICの話しを少々。
そしてそこから電気街一周コースを回ることに、まぁ西川の方は行ってませんけど・・・
そして三日月、ドスパラ、じゃんぱら、と回って今度は大きい方のマルツに立ち寄りました。
そしてそこでまた回路について話し込むことに。
何も買ってないのに・・・なんて営業妨害(笑)
そこからが総書記様が「帰りたくない!」といって駅前で30分話し込むことに・・・
傍から見たらシュールだったろうなぁ・・・まぁこれが高専生というものです。
それでそのあと適当にケリをつけて、なんとか満員電車に乗って帰ってきました。
そんなかんじでなんとか今日の秋葉ツアーは終了です。
でも・・・明後日、ツアー、再来。
なんと明後日また行くことに。
今日のツアーですら疲れて途中二人とも呂律が回らなかったのに、本当に明後日もやって大丈夫か?
・・・もう知らんっ!
という訳で今日はこの辺で。
因みに総書記様とは役職的な呼び名で、他の部活でいう・・・そう、書記的なアレです。
(^・ω・)ノRadiumProduction in RoboCupJunior
「秋葉に行こう」
という話になって、総書記様を連れていって来ました。
というのも、本来の目的は
電気工事士の筆記試験が、どうにも受かったっぽいので実技試験の教材を買いに行く。というものでした。
日曜に行ったら定休日だったので・・・(笑)
そしたらなんか、こんな秋葉ツアーをすることに・・・何故・・・?
まぁこの際そのことはどうでもいいや。
電車を乗り継いで、秋葉につきました。
とりあえずまず、電気工事士の教材部品を買うことにしたのですが、店内に入ってあることに気が付きました。
財布の中身は2千円。
電気工事士試験の教材の価格は1万円。
「・・・。さて、秋葉ツアー行こうか。」
とりあえずまずはヒロセにいって、そこから千石3件、そして閉まっている秋月と回りました。
そしてここで発見したことがひとつ。
いつの間にか、秋月の営業時間が18:30までに伸びていて、月木が定休日になっているという事態。
結構これは大きいぞ・・・気が付いてよかった。
でもその時、これがこの日唯一の収穫になることを、この時の僕達は知りも・・・いや薄々感づいてはいたかな。
そしてそこから秋月近くのマルツに行って、PICの話しを少々。
そしてそこから電気街一周コースを回ることに、まぁ西川の方は行ってませんけど・・・
そして三日月、ドスパラ、じゃんぱら、と回って今度は大きい方のマルツに立ち寄りました。
そしてそこでまた回路について話し込むことに。
何も買ってないのに・・・なんて営業妨害(笑)
そこからが総書記様が「帰りたくない!」といって駅前で30分話し込むことに・・・
傍から見たらシュールだったろうなぁ・・・まぁこれが高専生というものです。
それでそのあと適当にケリをつけて、なんとか満員電車に乗って帰ってきました。
そんなかんじでなんとか今日の秋葉ツアーは終了です。
でも・・・明後日、ツアー、再来。
なんと明後日また行くことに。
今日のツアーですら疲れて途中二人とも呂律が回らなかったのに、本当に明後日もやって大丈夫か?
・・・もう知らんっ!
という訳で今日はこの辺で。
因みに総書記様とは役職的な呼び名で、他の部活でいう・・・そう、書記的なアレです。
(^・ω・)ノRadiumProduction in RoboCupJunior
なんか、できました。

今日もロボカップ部は平和です。
とりあえず今日もカオスですが、とりあえずロボットの作成とNQCのインストールは行いました。
昨日よりも時間がかからなかったなぁ。あ、8限終了の鐘だ。
今は某数学教師の話をしています(笑)
とりあえず、今RCXとかの説明を一年生にしろと副部長に要求されているのでしようかな。
でも昨日ロボットの作成で終わったので、今日もそれに合わせて終わろうかな・・・
まぁ簡潔にLEGOの説明して終わります。
それじゃ説明してきます。
それではー。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日もロボカップ部は平和です。
とりあえず今日もカオスですが、とりあえずロボットの作成とNQCのインストールは行いました。
昨日よりも時間がかからなかったなぁ。あ、8限終了の鐘だ。
今は某数学教師の話をしています(笑)
とりあえず、今RCXとかの説明を一年生にしろと副部長に要求されているのでしようかな。
でも昨日ロボットの作成で終わったので、今日もそれに合わせて終わろうかな・・・
まぁ簡潔にLEGOの説明して終わります。
それじゃ説明してきます。
それではー。
(^・ω・)ノRadiumProduction in RoboCupJunior
発想の方向が素晴らしすぎます。特に3年生、最高(笑)
なんでこのような話になったかといいますと、宣言通り、今日から講習を開始したことにまで遡ります。
まず、体育で捻挫しました 。年1の頻度で捻挫する自分。なんででしょう?
そしてその落ちたテンションで保健室へ。とりあえず包帯ぐるぐる~っとされました。
そしてその下がり切ったテンションで部室へ。とりあえず沢山の1年生と2人の3年生がいました。
そしてそのままみんなで食堂へ、本当は7階を講習で使いたかったのですが、
誰が探しに行っても顧問の先生に会えなかったので仕方なく食堂で行うことに。
これがまさか、こんな喜劇を生むことになるなんて・・・この時の僕たちは想像もしていなかったのです・・・
まぁメンツから考えてカオスは必須でしょう。ということぐらいは理解していましたけど(笑)
今日のお題はロボットの作成です。作ります。とにかく。本読んで。それだけです。
副部長が一瞬で作成したロボットと説明書を参考に一年生はロボットを作ります。
ここまでは真面目な講習会だったんです、でもここから急に展開がシフトしてしまいます。
その特異点は3年生2人のこのセリフです。
「俺らもなんか作るわ。」
それがすべてのはじまり。そして、へいおんのおわり。
3年二人が足並み揃えて、時代を先走るようなアッチの意味で素晴らしい作品を作成し始めたのです(笑)
実際に写真があればよかったのですが、ちょっと自分の腹筋と戦っていたのでその余裕はありませんでした。
それと同時に、総書記様が、粗ぶりました。
僕は只、総書記様に「このロボットを前進させてください」という簡単な課題を出しただけです。
ロボカップ歴ウン年のトゥルースの明星である総書記様にとってはなんてこともないもない課題の筈です。
寧ろ冒涜ですよね、こんなの。
ところが・・・彼の創りだした答えは・・・
Z軸方向に向かって大回転するロボットでした。
・・・総書記様、貴方も時代の開拓者の一人だったのですね。
その後某Garudaがそのロボットをボウリングの球と勘違いしたのか、食堂でずっと転がして遊んでいました(笑)
一応・・・RCX乗ってるんですけど(苦笑)
全く、何度大破したことか・・・ファームも飛んだらしいです。まぁそれで済んでよかった。
とまぁこのような具合になって若干の暴走がありました。
まぁそれでも全員のロボットの完成というノルマは達成できたのでよかったといえるでしょう。
という訳で一先ず、第一回の講習は無事、終了しました。
とりあえず、明日は火曜組に同じ講習をやって、
その次からは実際にNQCを使ったプログラミングに入っていこうと思っています。
来週からはちょっと皆さん余裕なくなってくるんじゃないかなぁ(笑)まぁ授業の先取りと思って楽にやってくださいな。
まぁそんな具合で今日はこれで終了です。肩痛いし・・・
それではー
あ、あと総書記様宿題を忘れずに~。あと副部長は部員名簿の提出お願いします。
(^・ω・)ノRadiumProduction in RoboCupJunior
なんでこのような話になったかといいますと、宣言通り、今日から講習を開始したことにまで遡ります。
まず、体育で捻挫しました 。年1の頻度で捻挫する自分。なんででしょう?
そしてその落ちたテンションで保健室へ。とりあえず包帯ぐるぐる~っとされました。
そしてその下がり切ったテンションで部室へ。とりあえず沢山の1年生と2人の3年生がいました。
そしてそのままみんなで食堂へ、本当は7階を講習で使いたかったのですが、
誰が探しに行っても顧問の先生に会えなかったので仕方なく食堂で行うことに。
これがまさか、こんな喜劇を生むことになるなんて・・・この時の僕たちは想像もしていなかったのです・・・
まぁメンツから考えてカオスは必須でしょう。ということぐらいは理解していましたけど(笑)
今日のお題はロボットの作成です。作ります。とにかく。本読んで。それだけです。
副部長が一瞬で作成したロボットと説明書を参考に一年生はロボットを作ります。
ここまでは真面目な講習会だったんです、でもここから急に展開がシフトしてしまいます。
その特異点は3年生2人のこのセリフです。
「俺らもなんか作るわ。」
それがすべてのはじまり。そして、へいおんのおわり。
3年二人が足並み揃えて、時代を先走るようなアッチの意味で素晴らしい作品を作成し始めたのです(笑)
実際に写真があればよかったのですが、ちょっと自分の腹筋と戦っていたのでその余裕はありませんでした。
それと同時に、総書記様が、粗ぶりました。
僕は只、総書記様に「このロボットを前進させてください」という簡単な課題を出しただけです。
ロボカップ歴ウン年のトゥルースの明星である総書記様にとってはなんてこともないもない課題の筈です。
寧ろ冒涜ですよね、こんなの。
ところが・・・彼の創りだした答えは・・・
Z軸方向に向かって大回転するロボットでした。
・・・総書記様、貴方も時代の開拓者の一人だったのですね。
その後某Garudaがそのロボットをボウリングの球と勘違いしたのか、食堂でずっと転がして遊んでいました(笑)
一応・・・RCX乗ってるんですけど(苦笑)
全く、何度大破したことか・・・ファームも飛んだらしいです。まぁそれで済んでよかった。
とまぁこのような具合になって若干の暴走がありました。
まぁそれでも全員のロボットの完成というノルマは達成できたのでよかったといえるでしょう。
という訳で一先ず、第一回の講習は無事、終了しました。
とりあえず、明日は火曜組に同じ講習をやって、
その次からは実際にNQCを使ったプログラミングに入っていこうと思っています。
来週からはちょっと皆さん余裕なくなってくるんじゃないかなぁ(笑)まぁ授業の先取りと思って楽にやってくださいな。
まぁそんな具合で今日はこれで終了です。肩痛いし・・・
それではー
あ、あと総書記様宿題を忘れずに~。あと副部長は部員名簿の提出お願いします。
(^・ω・)ノRadiumProduction in RoboCupJunior
という訳で以前の続きです。
といっても半月ほど前ですね。
この時は、「変数」という箱があるよ。なんて話を適当にしたと思います。
それで今回はまた別の話として、画面に文字を表示させる方法について紹介したいと思います。
例えば、画面にLuzと表示させるプログラムはこんな感じ。
#include <stdio.h>
int main(void)
{
printf("Luz");
return 0;
}
まぁこんな数行でLuzという文字をPCの画面に表示することができます。
見ればわかると思うのですが、ここで、実際に画面に文字を表示させる命令をしている文が5行目の
printf("Luz");
です。ここに書かれているprintfというものは”でくくった中の文字を表示することができる関数というものです。
要するにこのように書けば、"で囲われている部分の文字を画面に出力する。という命令になります。
それに、以前紹介したおまじないを付け加えることで、このようなプログラムができる訳です。
ここではprintf以外の命令は行っていないのでpirntf以外は全部おまじないですね。
因みに囲う文字は世界標準だと基本的に半角英数のみですが、
日本語の使えるPCであれば、日本語を表示することもできます。
まぁつまり日本にあるPCなら大抵日本語の表示ができるということです。
日本語の表示をするときもこんな風に
printf("るーす");
という感じで打てば大丈夫です。何ら変わりはありません。
なんでこのようなことができるかというと・・・半角だろうと全角だろうと
結局全部PCにしてみれば文字は数字の集合体であるということは以前説明したかと思いますが、
PC側が「その数字の集まりを文字に置き換えられれば」どんな文字でも出力することはできるんですね。
例えば日本語のPCなら数字の集まりを半角英数+日本語の文字として認識することができ、
中国語のPCなら半角英数+中国語の文字として認識することができ・・・といった具合です。
だからPCが日本語に対応していれば、printfに日本語を書いても、
その日本語をPCが理解して画面に出力することができるという訳です。
ちょっとムツカシイというか意味深な説明ですが、まぁこんなところでしょう。
因みにこのpirntfは変数の値も出力させることができて
例えば変数aの値を出力したければ
printf("%d",a);
となります。
これでaの値(数字)が出力されます。
具体的なプログラムだと
#include <stdio.h>
int main(void)
{
int a=5;
printf("aの値は%dです。",a);
return 0;
}
こんな風にかけて、これだと出力結果は
aの値は5です。
となります。
要するに%dと書いたところに変数の値の数字が入って、
その入る変数を”のくくりの後にあるカンマの後に書くことで、変数の値を出力しているという訳です。
難しく言うと%dにaの値を代入している、ということになりますが、これの方がわかりやすいかな?
複数の変数の値を出したい場合は、
printf("aの値は%dで、bの値は%dです。",a,b);
とこのようになります。
因みに%dについてですが、これは変数がint型の時は%dでいいのですが
char型の時は%cに、float、double型の時は%fになります。
こういうのもちゃんち理由があり、また、他にもきっちりした区分けがあるのですが、
とりあえずややこしくなるので今回はこの話は省略で。
pirntf関数はまぁこのようにして使います。
他にも画面に文字を出力する関数はありますが、他のものはまた今度ということで。
次回は逆にキーボードから値をプログラムに入力する方法を紹介します。
それでは。
(^・ω・)ノRadiumProduction in RoboCup Junior
といっても半月ほど前ですね。
この時は、「変数」という箱があるよ。なんて話を適当にしたと思います。
それで今回はまた別の話として、画面に文字を表示させる方法について紹介したいと思います。
例えば、画面にLuzと表示させるプログラムはこんな感じ。
#include <stdio.h>
int main(void)
{
printf("Luz");
return 0;
}
まぁこんな数行でLuzという文字をPCの画面に表示することができます。
見ればわかると思うのですが、ここで、実際に画面に文字を表示させる命令をしている文が5行目の
printf("Luz");
です。ここに書かれているprintfというものは”でくくった中の文字を表示することができる関数というものです。
要するにこのように書けば、"で囲われている部分の文字を画面に出力する。という命令になります。
それに、以前紹介したおまじないを付け加えることで、このようなプログラムができる訳です。
ここではprintf以外の命令は行っていないのでpirntf以外は全部おまじないですね。
因みに囲う文字は世界標準だと基本的に半角英数のみですが、
日本語の使えるPCであれば、日本語を表示することもできます。
まぁつまり日本にあるPCなら大抵日本語の表示ができるということです。
日本語の表示をするときもこんな風に
printf("るーす");
という感じで打てば大丈夫です。何ら変わりはありません。
なんでこのようなことができるかというと・・・半角だろうと全角だろうと
結局全部PCにしてみれば文字は数字の集合体であるということは以前説明したかと思いますが、
PC側が「その数字の集まりを文字に置き換えられれば」どんな文字でも出力することはできるんですね。
例えば日本語のPCなら数字の集まりを半角英数+日本語の文字として認識することができ、
中国語のPCなら半角英数+中国語の文字として認識することができ・・・といった具合です。
だからPCが日本語に対応していれば、printfに日本語を書いても、
その日本語をPCが理解して画面に出力することができるという訳です。
ちょっとムツカシイというか意味深な説明ですが、まぁこんなところでしょう。
因みにこのpirntfは変数の値も出力させることができて
例えば変数aの値を出力したければ
printf("%d",a);
となります。
これでaの値(数字)が出力されます。
具体的なプログラムだと
#include <stdio.h>
int main(void)
{
int a=5;
printf("aの値は%dです。",a);
return 0;
}
こんな風にかけて、これだと出力結果は
aの値は5です。
となります。
要するに%dと書いたところに変数の値の数字が入って、
その入る変数を”のくくりの後にあるカンマの後に書くことで、変数の値を出力しているという訳です。
難しく言うと%dにaの値を代入している、ということになりますが、これの方がわかりやすいかな?
複数の変数の値を出したい場合は、
printf("aの値は%dで、bの値は%dです。",a,b);
とこのようになります。
因みに%dについてですが、これは変数がint型の時は%dでいいのですが
char型の時は%cに、float、double型の時は%fになります。
こういうのもちゃんち理由があり、また、他にもきっちりした区分けがあるのですが、
とりあえずややこしくなるので今回はこの話は省略で。
pirntf関数はまぁこのようにして使います。
他にも画面に文字を出力する関数はありますが、他のものはまた今度ということで。
次回は逆にキーボードから値をプログラムに入力する方法を紹介します。
それでは。
(^・ω・)ノRadiumProduction in RoboCup Junior
今日は学校説明会がありまして、急きょ、うちの部活も召集されました。
その召集内容は「土曜日は学校説明会で中学生が見学に来るので部室で活動していてください」というものでした。
部室の見学会でもするのかな?
こんな時期にあるなんて・・・知らなかった(笑)
そんなことを考えながら、学校に行ってみると副部長から電話が。
「場所が部室から1階に変更になりました。」
(0дo)!?
え?部室の見学会するんですよね?なんで部室じゃないの?と考えながらとりあえず部室に行ってみる。
そこで気づきました。自分が勘違いをしていたことを・・・
どうやら「部室の見学会」ではなく、「部活の紹介」を頼まれていたみたいなんです。
え。準備してない(笑)
説明なども考えていなかったので焦りました。
とりあえずロボットと、大会のポスターとパンフレットと・・・と持っていくものを持って行って一階に向いました。
説明は案の定崩壊しました。という訳で一年生に任せることに(笑)
自分は・・・といいますと、説明会に参加してくれていた某トゥルースの後輩や、KOYOさんを連れて
部室の方に避難していました。部室の見学会と称して。
まぁそこで例のRCXピラミッドの残骸を見せたり、黒歴史の公開をしたり、学校の特徴などを話したり、
といったことを行っていました。ちゃんとこっちも説明していたんですよ。総書記様(笑)
そして説明会が終わり、その後、部室の掃除をすることに。
エッチングの危険な廃液など、どうしようもないものとかも掘り出されましたが、
まぁそれ以外は割かし綺麗に片付いたと思います。
ホワイトボードも処理できたし、部のPC も回収できたし、いいんじゃないでしょうか(内輪ネタ)
という訳で来週からは本格的に講習が始まります。
一先ず来週はロボットの作成で終わると思います。プログラムは来週からかな・・・
とりあえず最初は部品を広げるので7階の部屋を貸していただこうかなと考えているので
多分場所は7階になります。でもRCXが下にあるので、とりま部室に集合してください。
という訳で一年生の皆さん参加お願いします。
まぁそんな感じで、以上です。
(^・ω・)ノRadiumProduction in RoboCupJunior
その召集内容は「土曜日は学校説明会で中学生が見学に来るので部室で活動していてください」というものでした。
部室の見学会でもするのかな?
こんな時期にあるなんて・・・知らなかった(笑)
そんなことを考えながら、学校に行ってみると副部長から電話が。
「場所が部室から1階に変更になりました。」
(0дo)!?
え?部室の見学会するんですよね?なんで部室じゃないの?と考えながらとりあえず部室に行ってみる。
そこで気づきました。自分が勘違いをしていたことを・・・
どうやら「部室の見学会」ではなく、「部活の紹介」を頼まれていたみたいなんです。
え。準備してない(笑)
説明なども考えていなかったので焦りました。
とりあえずロボットと、大会のポスターとパンフレットと・・・と持っていくものを持って行って一階に向いました。
説明は案の定崩壊しました。という訳で一年生に任せることに(笑)
自分は・・・といいますと、説明会に参加してくれていた某トゥルースの後輩や、KOYOさんを連れて
部室の方に避難していました。部室の見学会と称して。
まぁそこで例のRCXピラミッドの残骸を見せたり、黒歴史の公開をしたり、学校の特徴などを話したり、
といったことを行っていました。ちゃんとこっちも説明していたんですよ。総書記様(笑)
そして説明会が終わり、その後、部室の掃除をすることに。
エッチングの危険な廃液など、どうしようもないものとかも掘り出されましたが、
まぁそれ以外は割かし綺麗に片付いたと思います。
ホワイトボードも処理できたし、部のPC も回収できたし、いいんじゃないでしょうか(内輪ネタ)
という訳で来週からは本格的に講習が始まります。
一先ず来週はロボットの作成で終わると思います。プログラムは来週からかな・・・
とりあえず最初は部品を広げるので7階の部屋を貸していただこうかなと考えているので
多分場所は7階になります。でもRCXが下にあるので、とりま部室に集合してください。
という訳で一年生の皆さん参加お願いします。
まぁそんな感じで、以上です。
(^・ω・)ノRadiumProduction in RoboCupJunior
実は書いていそうで書いていないのがこの、RCXの記事です。
LEGO Mindstormの初代シリーズ、RIS(ロボティクスインベンションシステム)に付属されている部品ですね。
簡潔な紹介程度は行ってはいるのですが・・・
まぁ最近部活でも再びお役が回ってきたのでもういちどちゃんとした紹介を
このRCXというのは、まぁなにかといいますと、

こんな感じの物体で、LEGOブロックの一種です。
学校には腐るほどあると噂されています。ホントはいくつあるんだろう・・・最低でも20個はあるみたいだけど・・・
このブロックは他のLEGOブロックとは違い、センサーやモーターをつないで、それを自由自在に制御することができ、
簡単にいうと、小さなコンピューターが内蔵されているブロックということになります。
これにパソコンでプログラムを送ってやることで、プログラムの通り、ロボットを動かせることができるようになります。
専門的な話をしますと、内部のコアはH8/300マイコンを使用しており、
PICなんかとか比べ物にならないぐらい高性能だったりします。でも教育用ロボット教材なので安定性を追求した結果、
事実上の内部の動作クロックが極端に遅くなっています。(大体6ms程)
また、センサーのポートは全部で3つ、モーターのポートも計3つ、
つまりセンサーとモーターはそれぞれ3つずつ搭載(というより制御)することができる訳です。
まぁこの数だとロボカップジュニアでは(特にセンサーが)不足するので、
みんな、あの手この手で接続できるセンサーを増やしているようですね。Radiumのロボットも酷かったな・・・(笑)
またプログラムのダウンロードはこのような赤外線タワーを使用して行います。
シリアルポート用

USB用

今はUSBのやつしか見ませんね。そもそも今のPCにはシリアルポートなんてありませんしね(笑)
また、プログラム用のソフトウェアとしては、有料版でROBOLABやLEGO MINDSTORMS等、
フリーだとNQC、RCXCode等、様々なソフトウェアが充実している上に、
GCCやJAVAでもプログラムの作成が行えるので、CやJAVAの経験者なら簡単にプログラムを作ることができます。
まぁこんな感じのRCXですが、現在は後継として、NXTというものが発売されており、
それに伴ってRCXのほうは生産を終了しています。
まだ一部では販売されているようですが、直に新品の在庫は尽きると思われます。
欲しい方はお早めに~って、もう手遅れかもですけど(笑)
という訳で今年のロボカップ部はこの教材をメインにして活動していこうと思っています。
それでは
(^・ω・)ノRadiumProduction in RoboCupJunior
LEGO Mindstormの初代シリーズ、RIS(ロボティクスインベンションシステム)に付属されている部品ですね。
簡潔な紹介程度は行ってはいるのですが・・・
まぁ最近部活でも再びお役が回ってきたのでもういちどちゃんとした紹介を
このRCXというのは、まぁなにかといいますと、
こんな感じの物体で、LEGOブロックの一種です。
学校には腐るほどあると噂されています。ホントはいくつあるんだろう・・・最低でも20個はあるみたいだけど・・・
このブロックは他のLEGOブロックとは違い、センサーやモーターをつないで、それを自由自在に制御することができ、
簡単にいうと、小さなコンピューターが内蔵されているブロックということになります。
これにパソコンでプログラムを送ってやることで、プログラムの通り、ロボットを動かせることができるようになります。
専門的な話をしますと、内部のコアはH8/300マイコンを使用しており、
PICなんかとか比べ物にならないぐらい高性能だったりします。でも教育用ロボット教材なので安定性を追求した結果、
事実上の内部の動作クロックが極端に遅くなっています。(大体6ms程)
また、センサーのポートは全部で3つ、モーターのポートも計3つ、
つまりセンサーとモーターはそれぞれ3つずつ搭載(というより制御)することができる訳です。
まぁこの数だとロボカップジュニアでは(特にセンサーが)不足するので、
みんな、あの手この手で接続できるセンサーを増やしているようですね。Radiumのロボットも酷かったな・・・(笑)
またプログラムのダウンロードはこのような赤外線タワーを使用して行います。
シリアルポート用
USB用
今はUSBのやつしか見ませんね。そもそも今のPCにはシリアルポートなんてありませんしね(笑)
また、プログラム用のソフトウェアとしては、有料版でROBOLABやLEGO MINDSTORMS等、
フリーだとNQC、RCXCode等、様々なソフトウェアが充実している上に、
GCCやJAVAでもプログラムの作成が行えるので、CやJAVAの経験者なら簡単にプログラムを作ることができます。
まぁこんな感じのRCXですが、現在は後継として、NXTというものが発売されており、
それに伴ってRCXのほうは生産を終了しています。
まだ一部では販売されているようですが、直に新品の在庫は尽きると思われます。
欲しい方はお早めに~って、もう手遅れかもですけど(笑)
という訳で今年のロボカップ部はこの教材をメインにして活動していこうと思っています。
それでは
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
(01/01)
(05/07)
(01/11)
プロフィール
HN:
Luz
性別:
男性
アーカイブ