RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
色々やってはみたけれど、
やっぱり噂どおり、NXCの付属関数ではハイテックのI2Cセンサーは重ねづけ(ライン)はできないようですね・・・
というよりアクセルとジャイロが無理?超音波もできないという話を聞いています。
そういえばNXCでI2Cのライン制御はしたことがありませんでしたね。まさか本当にできないとは・・・。
他のソフトだとできるんですけどね。RobotCとか・・・NXCだけ特殊なのでしょうか?
多分センサーの値読みの関数そのものに問題があるんでしょうね。他のソフトでできるならNXCでもできるはずです。
ちょっと暫くはそっちの研究に時間をとられそうです。後ロボコンとか・・・
まぁできたらできたで報告します。できなかったら・・・恐らく水に流します(笑)
とりあえずまずはこの前作った自作関数で試してみようかと思っています。
それではー。
追記:ソフト欠陥じゃなくてそもそもこの子たちのI2Cのアドレスが全部統一だったようです。
そりゃ無理なわけだ・・・。
(^・ω・)ノRadiumProduction in RoboCupJunior
やっぱり噂どおり、NXCの付属関数ではハイテックのI2Cセンサーは重ねづけ(ライン)はできないようですね・・・
というよりアクセルとジャイロが無理?超音波もできないという話を聞いています。
そういえばNXCでI2Cのライン制御はしたことがありませんでしたね。まさか本当にできないとは・・・。
他のソフトだとできるんですけどね。RobotCとか・・・NXCだけ特殊なのでしょうか?
多分センサーの値読みの関数そのものに問題があるんでしょうね。他のソフトでできるならNXCでもできるはずです。
ちょっと暫くはそっちの研究に時間をとられそうです。後ロボコンとか・・・
まぁできたらできたで報告します。できなかったら・・・恐らく水に流します(笑)
とりあえずまずはこの前作った自作関数で試してみようかと思っています。
それではー。
追記:ソフト欠陥じゃなくてそもそもこの子たちのI2Cのアドレスが全部統一だったようです。
そりゃ無理なわけだ・・・。
(^・ω・)ノRadiumProduction in RoboCupJunior
結果的に
「色々アイデアが浮かんではルールを読んで消える。」
の繰り返しです。 ルールは此方 アリーナ図は此方
一先ず、この競技でどこに重点が置かれているかを端的に説明します。
まずは、
2足ロボットの歩行速度
3年前からずっとそうでしたが、今年は特に重要です。
なんたってディフェンスロボットは駆動方法自由なんですから。タイヤだってアリなわけです。
そんなのと速度で闘う必要があるのですから、昨年以上に歩行速度は重要になってきます。
でも・・・タイヤに速度で勝てる2足なんて・・・作れるの?世界陸上とかでれますよ。そのロボット(笑)
次に
ボールの捕球方法
前の記事で書いたように、高専生がなげるへっぽこボールをしっかりとキャッチしなくてはなりません。
まぁキャッチゾーンからはみ出るような捕球機構は、ルール上禁止されていますから
けっこうここの発想は限られてくるような気もしなくもありません。
そして
ボールの射出方法
ボールが球体ではありませんから、捕球機構との兼ね合いが難しいように思えます。
それとアメフトボールは無回転で投げても殆ど飛びません。ディフェンスロボットが5mもの高さがあることを想定すると、
回転をかけつつ、勢いよく飛ばす機構が必要になってきます。
更に
ディフェンスロボットの安定性
底面が直径1mしかないのに高さが5mのロボットを作ろうとすると、かなりロボットを低重心にする必要がでてきます。
普通に走ってても倒れそうなのに、そこに勢いよくアメフトボールやオフェンスロボットが突進してきたら・・・
東京タワーで済めばいいですが、クライストチャーチは困ります。
できればスカイツリーであって欲しいものです。
まぁ無理に5mのものを作る必要性なんてないんですけど。
そもそもうちの学校の設備じゃ5mは作りようがありませんね(笑)
まぁどちらにしろ、うちの高専の場合
大会のときに搬入に来るトラックが何故か、毎年他の高専のものに比べて2ランクぐらい小さいものなので
作ったらその時点で大会に参加できなくなります(笑)トラックに入らないので・・・
そして一番大事なのが
高専生の運動能力
ロボットに(むしろキャッチゾーン内に)ボールを正確に投げることができる(高専生の中では)超人的な運動能力、
また、ロボットが投げた(投げつけた)ボールを確実にキャッチすることができる(高専生の中では)超人的な反射神経
この高専生(特にロボコン部員)に対して立ちはだかる、今までに無いほどの巨大で難攻不落の壁
頭ではどうやっても解決することのできないこの壁に、どうやって対処すればいいのでしょうか・・・
それにしてもこの競技、
いかに高専生の運動能力がヘタレかを、全国の方々に認識してもらう為のものなのでしょうか。
この競技放送したら求人倍率落ちるだろうな・・・(体力の無さとか露呈しそう・・・)
(^・ω・)ノRadiumProduction in RoboCupJunior
「色々アイデアが浮かんではルールを読んで消える。」
の繰り返しです。 ルールは此方 アリーナ図は此方
一先ず、この競技でどこに重点が置かれているかを端的に説明します。
まずは、
2足ロボットの歩行速度
3年前からずっとそうでしたが、今年は特に重要です。
なんたってディフェンスロボットは駆動方法自由なんですから。タイヤだってアリなわけです。
そんなのと速度で闘う必要があるのですから、昨年以上に歩行速度は重要になってきます。
でも・・・タイヤに速度で勝てる2足なんて・・・作れるの?世界陸上とかでれますよ。そのロボット(笑)
次に
ボールの捕球方法
前の記事で書いたように、高専生がなげるへっぽこボールをしっかりとキャッチしなくてはなりません。
まぁキャッチゾーンからはみ出るような捕球機構は、ルール上禁止されていますから
けっこうここの発想は限られてくるような気もしなくもありません。
そして
ボールの射出方法
ボールが球体ではありませんから、捕球機構との兼ね合いが難しいように思えます。
それとアメフトボールは無回転で投げても殆ど飛びません。ディフェンスロボットが5mもの高さがあることを想定すると、
回転をかけつつ、勢いよく飛ばす機構が必要になってきます。
更に
ディフェンスロボットの安定性
底面が直径1mしかないのに高さが5mのロボットを作ろうとすると、かなりロボットを低重心にする必要がでてきます。
普通に走ってても倒れそうなのに、そこに勢いよくアメフトボールやオフェンスロボットが突進してきたら・・・
東京タワーで済めばいいですが、クライストチャーチは困ります。
できればスカイツリーであって欲しいものです。
まぁ無理に5mのものを作る必要性なんてないんですけど。
そもそもうちの学校の設備じゃ5mは作りようがありませんね(笑)
まぁどちらにしろ、うちの高専の場合
大会のときに搬入に来るトラックが何故か、毎年他の高専のものに比べて2ランクぐらい小さいものなので
作ったらその時点で大会に参加できなくなります(笑)トラックに入らないので・・・
そして一番大事なのが
高専生の運動能力
ロボットに(むしろキャッチゾーン内に)ボールを正確に投げることができる(高専生の中では)超人的な運動能力、
また、ロボットが投げた(投げつけた)ボールを確実にキャッチすることができる(高専生の中では)超人的な反射神経
この高専生(特にロボコン部員)に対して立ちはだかる、今までに無いほどの巨大で難攻不落の壁
頭ではどうやっても解決することのできないこの壁に、どうやって対処すればいいのでしょうか・・・
それにしてもこの競技、
いかに高専生の運動能力がヘタレかを、全国の方々に認識してもらう為のものなのでしょうか。
この競技放送したら求人倍率落ちるだろうな・・・(体力の無さとか露呈しそう・・・)
(^・ω・)ノRadiumProduction in RoboCupJunior
GWはずっと今年の高専ロボコンのロボットのアイデア会議のプレゼン作成基アイデアの検討に追われているのですが、
なんかこの競技、競技になるのかなぁ・・・と言った不安が見えてきました。
まず今回の競技、ロボボウルですが、どのような競技かというと、
まず、フィールドがこんな感じであります。
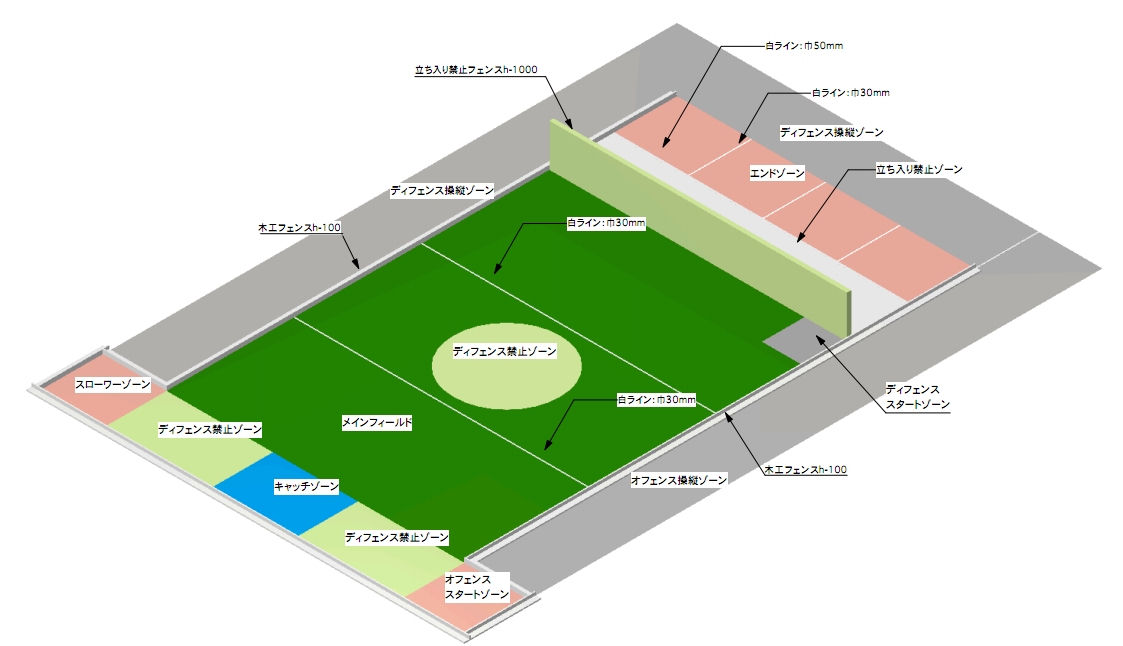
それでロボットは各チーム2台ずつ、2足のオフェンスロボットと移動方法制限なしのディフェンスロボットです。
どうやら今年はどちらも手動ロボットで行うそうです。無線管理がめんどくさそう・・・
それで競技ですが、競技時間は1分30秒。攻守があるので合計3分です。
まずオフェンスロボットが一番手前のピンクの部分から、
ディフェンスロボットがメインフィールド右億の灰色の部分から、それぞれ同時にスタートします。
そこからディフェンスロボットは自由です。立ち入り禁止ゾーン、ディフェンス禁止ゾーン以外では縦横無尽に走り回ります。
オフェンスロボットはと云うと、まず、青色のキャッチゾーンに向かいます。
オフェンスロボットがそこについた時点で、反対奥にあるスローワーゾーンからチームの高専生(スローワー)が
オフェンスロボットめがけてボールを投げ、それをオフェンスロボットがキャッチします。
その後、オフェンスロボットはキャッチゾーンとディフェンス禁止ゾーンを含むメインフィ-ルドからなんとかして
フィールド奥のエンドゾーン内にいるメンバーの高専生(レシーバー)に向かってボールを投げます。
それでレシーバーがその飛んできたボールをエンドゾーン内でキャッチできたら攻撃終了、攻守交替となります。
特記事項としては、使用できるボールは合計4個、でもボールは普通のボールではなく、アメフトボールです。
あとオフェンスロボットは変形自由ですが、スタート時に1500×1500のスタートゾーン内に入っていることが条件。
ディフェンスロボットは直径1mの円からはみ出すサイズの変形は禁止ですが、
高さだけはスタート後に5mまで伸ばすことができます。
またオフェンス、ディフェンスロボットによる相手ロボットの進路妨害はできますが、ホールドはできません。
最後にオフェンスロボットが投げたボールをディフェンスロボットがキャッチした場合「インターセプト成功」となり
競技時間が30秒減ったりします。
まぁこのくらいでしょうか。
さて。ここで、タイトルにありますように、僕はこの競技、無理があるんじゃないかなぁ。と思うんです。
どこら辺に無理があるか。それはスローワーの部分です。
高専生であるスローワー、それがロボットに向けてボールを投げるんですよ。
スローワーゾーンとキャッチゾーンの距離は約2.5m。
そんな距離、一見たいしたことないようにも思えますが、投げるボールはなんとアメフトボール
あんなまっすぐ飛ばないもんどうやって・・・
地面に落ちたボールは競技では2度と使えなくなるので、確実にロボットにボールをキャッチさせなければなりません。
ロボットの変形は自由とはいえ、捕球はキャッチゾーン内で行わなければならないので
スローワーゾーン前までロボットのアームを伸ばして・・・みたいな作戦はできません。
なんかロボット以前にその部分でうまく投げられるかどうかで決着がつく試合がいくらかでてくるような気がするんです。
なんかそれって・・・ロボットともアイデアとも関係なくないですか?
まぁそういうことです。
そこ以降でも結構これどうなんだ?ってルールが多いですね。
いつも訳のわからないルールを提示することが多い高専ロボコンですが、今回はひときわ意味不明です。
まぁ以前の某大運動会でバーの高さについての提示で
「バーの高さは1mとする(重力誤差±5%)」とかいう常識外れの定義をやってのけたりもしてますけど(笑)
あれですね、NHKの技術は宇宙の物理法則をも凌駕するということですね。
それでは今日はこの辺で。
この鬼畜競技にどう挑むか・・・難しい課題です(高専生の運動神経的な意味で)
どうでもいいけど、花粉症が酷くてティッシュが一日2箱のペースで減っていくのですが、こんな僕は異常でしょうか?
(^・ω・)ノRadiumProduction in RoboCupJunior
なんかこの競技、競技になるのかなぁ・・・と言った不安が見えてきました。
まず今回の競技、ロボボウルですが、どのような競技かというと、
まず、フィールドがこんな感じであります。
それでロボットは各チーム2台ずつ、2足のオフェンスロボットと移動方法制限なしのディフェンスロボットです。
どうやら今年はどちらも手動ロボットで行うそうです。無線管理がめんどくさそう・・・
それで競技ですが、競技時間は1分30秒。攻守があるので合計3分です。
まずオフェンスロボットが一番手前のピンクの部分から、
ディフェンスロボットがメインフィールド右億の灰色の部分から、それぞれ同時にスタートします。
そこからディフェンスロボットは自由です。立ち入り禁止ゾーン、ディフェンス禁止ゾーン以外では縦横無尽に走り回ります。
オフェンスロボットはと云うと、まず、青色のキャッチゾーンに向かいます。
オフェンスロボットがそこについた時点で、反対奥にあるスローワーゾーンからチームの高専生(スローワー)が
オフェンスロボットめがけてボールを投げ、それをオフェンスロボットがキャッチします。
その後、オフェンスロボットはキャッチゾーンとディフェンス禁止ゾーンを含むメインフィ-ルドからなんとかして
フィールド奥のエンドゾーン内にいるメンバーの高専生(レシーバー)に向かってボールを投げます。
それでレシーバーがその飛んできたボールをエンドゾーン内でキャッチできたら攻撃終了、攻守交替となります。
特記事項としては、使用できるボールは合計4個、でもボールは普通のボールではなく、アメフトボールです。
あとオフェンスロボットは変形自由ですが、スタート時に1500×1500のスタートゾーン内に入っていることが条件。
ディフェンスロボットは直径1mの円からはみ出すサイズの変形は禁止ですが、
高さだけはスタート後に5mまで伸ばすことができます。
またオフェンス、ディフェンスロボットによる相手ロボットの進路妨害はできますが、ホールドはできません。
最後にオフェンスロボットが投げたボールをディフェンスロボットがキャッチした場合「インターセプト成功」となり
競技時間が30秒減ったりします。
まぁこのくらいでしょうか。
さて。ここで、タイトルにありますように、僕はこの競技、無理があるんじゃないかなぁ。と思うんです。
どこら辺に無理があるか。それはスローワーの部分です。
高専生であるスローワー、それがロボットに向けてボールを投げるんですよ。
スローワーゾーンとキャッチゾーンの距離は約2.5m。
そんな距離、一見たいしたことないようにも思えますが、投げるボールはなんとアメフトボール
あんなまっすぐ飛ばないもんどうやって・・・
地面に落ちたボールは競技では2度と使えなくなるので、確実にロボットにボールをキャッチさせなければなりません。
ロボットの変形は自由とはいえ、捕球はキャッチゾーン内で行わなければならないので
スローワーゾーン前までロボットのアームを伸ばして・・・みたいな作戦はできません。
なんかロボット以前にその部分でうまく投げられるかどうかで決着がつく試合がいくらかでてくるような気がするんです。
なんかそれって・・・ロボットともアイデアとも関係なくないですか?
まぁそういうことです。
そこ以降でも結構これどうなんだ?ってルールが多いですね。
いつも訳のわからないルールを提示することが多い高専ロボコンですが、今回はひときわ意味不明です。
まぁ以前の某大運動会でバーの高さについての提示で
「バーの高さは1mとする(重力誤差±5%)」とかいう常識外れの定義をやってのけたりもしてますけど(笑)
あれですね、NHKの技術は宇宙の物理法則をも凌駕するということですね。
それでは今日はこの辺で。
この鬼畜競技にどう挑むか・・・難しい課題です(高専生の運動神経的な意味で)
どうでもいいけど、花粉症が酷くてティッシュが一日2箱のペースで減っていくのですが、こんな僕は異常でしょうか?
(^・ω・)ノRadiumProduction in RoboCupJunior
と、言う訳でコンデンサの最後の記事になりました 。
これからコンデンサの実際の使い方について、書いていこうと思います。
と、その前にここまでの記事のふくしゅーを。
まず最初の記事。
ここではコンデンサって何?という話から、電柱についてるアレはコンデンサじゃなくて変圧器だよって話までをしました。
コンデンサってなんでいるの?という話もしたような気もしますがよく覚えて言いません(笑)
まぁきっとそんな大事なことは書いていないでしょう(と願いたい)。
次に写真の記事。
この記事では写真を分ふんだんに使ってコンデンサの種類について説明しました。
でも結局ロボカップで使いそうなのは基本的に上ふたつのみだったり。タンタルは場合によって使うけど
まぁ上ふたつだけ覚えれば実際なんも問題なかったりします。
因みに関東ブロックの時の僕のロボットには電解2重層がついてました。ブログの写真だとありませんけど(笑)
最後に最近書いたこの記事。
この記事だけ記憶が鮮明です。確かポケモンからはじまってポケモンで終わった記事でしたね。
内容に関しましてはリンク先を参考してください。ふくしゅーの文章かくのに飽きました(笑)
と言うわけで先に進んでいこうと思います。
まずコンデンサの接続方法について、
とりあえず、ここでは直流での話をしていきます。交流加わるとまた話がややこしくなるので・・・
コンデンサはこのように通常2本の線がでています。

白い方(線が短い方)がマイナスと言う話は、以前にしたかと思います。
そんでこれを・・・回路に繋ぎます。
えっと・・・どんな風に?
はい。今回コンデンサを回路に繋ぐ目的、なんでコンデンサを繋ぐの?というところに話が戻るのですが、
今回のコンデンサの使用目的。それは「直流回路における、電源電圧の安定化」 でしたね。
だとすると、今回の場合、マイナス側の線を回路のマイナスに、もう一方を回路の電源に繋ぐことになります。
これはコンデンサが電気を貯めるのに、電源と同じだけの電圧で貯めないと、
供給する電気の電圧も電源と同じ電圧にならないので安定化にならないと言う理由からです。
つまりコンデンサに貯まる電気の電圧というものは(直流の場合)プラス側に繋ぐ電気の電圧ということになります。
そんでもってコンデンサは繋ぐだけで勝手に電気をためて、
電機の供給がなくなったら勝手に電気を放出する素子なんですね。
だから図で適当に説明するとこんな感じに繋げばいいんじゃないかなぁ。となるわけです。
これがわかってないとコンデンサ、混乱するかもですね。
こういう電源安定化の措置をノイズダウンとかノイズキャンセリング、あと広義だとバッファともいうらしいです。
バッファはまぁ・・・正しいちゃ正しいけど、
措置と言うよりどちらかというとコンデンサそのものをバッファと言うべきじゃ・・・という気もします。
という訳でコンデンサの説明はこんな感じです。
文章なくても図だけで大丈夫だった気もしますが、まぁ。うん。そういうことで・・・
今度のcircuitカテゴリーは説明をするのにいちいち図を書くのがめんどくさくなったので
「回路図」についての話をちょっとしようかなと思っています。
それではまた
これからコンデンサの実際の使い方について、書いていこうと思います。
と、その前にここまでの記事のふくしゅーを。
まず最初の記事。
ここではコンデンサって何?という話から、電柱についてるアレはコンデンサじゃなくて変圧器だよって話までをしました。
コンデンサってなんでいるの?という話もしたような気もしますがよく覚えて言いません(笑)
まぁきっとそんな大事なことは書いていないでしょう(と願いたい)。
次に写真の記事。
この記事では写真を分ふんだんに使ってコンデンサの種類について説明しました。
でも結局ロボカップで使いそうなのは基本的に上ふたつのみだったり。タンタルは場合によって使うけど
まぁ上ふたつだけ覚えれば実際なんも問題なかったりします。
因みに関東ブロックの時の僕のロボットには電解2重層がついてました。ブログの写真だとありませんけど(笑)
最後に最近書いたこの記事。
この記事だけ記憶が鮮明です。確かポケモンからはじまってポケモンで終わった記事でしたね。
内容に関しましてはリンク先を参考してください。ふくしゅーの文章かくのに飽きました(笑)
と言うわけで先に進んでいこうと思います。
まずコンデンサの接続方法について、
とりあえず、ここでは直流での話をしていきます。交流加わるとまた話がややこしくなるので・・・
コンデンサはこのように通常2本の線がでています。
白い方(線が短い方)がマイナスと言う話は、以前にしたかと思います。
そんでこれを・・・回路に繋ぎます。
えっと・・・どんな風に?
はい。今回コンデンサを回路に繋ぐ目的、なんでコンデンサを繋ぐの?というところに話が戻るのですが、
今回のコンデンサの使用目的。それは「直流回路における、電源電圧の安定化」 でしたね。
だとすると、今回の場合、マイナス側の線を回路のマイナスに、もう一方を回路の電源に繋ぐことになります。
これはコンデンサが電気を貯めるのに、電源と同じだけの電圧で貯めないと、
供給する電気の電圧も電源と同じ電圧にならないので安定化にならないと言う理由からです。
つまりコンデンサに貯まる電気の電圧というものは(直流の場合)プラス側に繋ぐ電気の電圧ということになります。
そんでもってコンデンサは繋ぐだけで勝手に電気をためて、
電機の供給がなくなったら勝手に電気を放出する素子なんですね。
だから図で適当に説明するとこんな感じに繋げばいいんじゃないかなぁ。となるわけです。
これがわかってないとコンデンサ、混乱するかもですね。
こういう電源安定化の措置をノイズダウンとかノイズキャンセリング、あと広義だとバッファともいうらしいです。
バッファはまぁ・・・正しいちゃ正しいけど、
措置と言うよりどちらかというとコンデンサそのものをバッファと言うべきじゃ・・・という気もします。
という訳でコンデンサの説明はこんな感じです。
文章なくても図だけで大丈夫だった気もしますが、まぁ。うん。そういうことで・・・
今度のcircuitカテゴリーは説明をするのにいちいち図を書くのがめんどくさくなったので
「回路図」についての話をちょっとしようかなと思っています。
それではまた
レポートかかなきゃ。
(^・ω・)ノRadiumProduction in RoboCupJunior
最近、遂にHiTechnic社製のセンサーに手を出し始めました。
全く使ったことがないわけではないのですが、どうにも面倒で、これなら市販のものがいいなーという風な感じになって
結局ロボットに搭載することはありませんでした。
だけど、折角コレも家にあるので、使わないと損かなーという気持ちになって使ってみることに、
 ←コレ
←コレ
とりあえず、今遊んでいるのが
アクセルセンサー

ジャイロセンサー

コンパスセンサー

ですね。
因みにセンサーは全部学校のものです(笑)
今話題のEOPDは学校にないし、まだ使う予定はありませんね。
今のところ超音波で間に合ってます。
まぁ今度のロボットは余りセンサーを増やさない方針でいこうと考えています。
やっぱる20個もあると面倒なので・・・(笑)
そんな感じで今日はこの辺で。
(^・ω・)ノRadiumProduction in RoboCupJunior
全く使ったことがないわけではないのですが、どうにも面倒で、これなら市販のものがいいなーという風な感じになって
結局ロボットに搭載することはありませんでした。
だけど、折角コレも家にあるので、使わないと損かなーという気持ちになって使ってみることに、
←コレとりあえず、今遊んでいるのが
アクセルセンサー
ジャイロセンサー
コンパスセンサー
ですね。
因みにセンサーは全部学校のものです(笑)
今話題のEOPDは学校にないし、まだ使う予定はありませんね。
今のところ超音波で間に合ってます。
まぁ今度のロボットは余りセンサーを増やさない方針でいこうと考えています。
やっぱる20個もあると面倒なので・・・(笑)
そんな感じで今日はこの辺で。
(^・ω・)ノRadiumProduction in RoboCupJunior
どうやら 、自分のロボットのアイデアをプレゼン形式で発表しなければならないそうです。
3日前に言うか?普通・・・
ル-ルを読んだだけじゃ競技の概要もよくつかめないような(特にゾーン分けが)競技なので
そのなかでアイデアを出せだなんて・・・しかも期限3日。
更に全部員にやれという話のはずなのに副部長がそれを知らない。なんて有り得ますかね?
という訳でGWはロボカップどころではなくなってしまいました。
とりあえず流れで「了解しました。」と言ってしまいましたが、これはどう頑張っても間に合う気配がありません。
だってたった3日でロボット4台を設計し、更にその利点を文章にあげて発表できる段階にするって・・・
何人が間に合わせられるんだろう(笑)
そもそも副部長に話がいってないって時点で、この会議そのものが計画倒れな気もします。
が、あえてこのあたりスルーで行こうと思います(笑)
最後に、明日からジャパンオープンですね。
参加する方々はイスタンブール目指して頑張ってください。
でわでわ
(^・ω・)ノRadiumProduction in RoboCupJunior
3日前に言うか?普通・・・
ル-ルを読んだだけじゃ競技の概要もよくつかめないような(特にゾーン分けが)競技なので
そのなかでアイデアを出せだなんて・・・しかも期限3日。
更に全部員にやれという話のはずなのに副部長がそれを知らない。なんて有り得ますかね?
という訳でGWはロボカップどころではなくなってしまいました。
とりあえず流れで「了解しました。」と言ってしまいましたが、これはどう頑張っても間に合う気配がありません。
だってたった3日でロボット4台を設計し、更にその利点を文章にあげて発表できる段階にするって・・・
何人が間に合わせられるんだろう(笑)
そもそも副部長に話がいってないって時点で、この会議そのものが計画倒れな気もします。
が、あえてこのあたりスルーで行こうと思います(笑)
最後に、明日からジャパンオープンですね。
参加する方々はイスタンブール目指して頑張ってください。
でわでわ
(^・ω・)ノRadiumProduction in RoboCupJunior
今朝1年半ぶりくらいにハートゴールドを起動したら、フリーザーの目の前でかなり焦りました。
朝からずっと捕獲ゲーが続いています。所持ボールが少なすぎる・・・(泣)
そんなことはさておき、1ヶ月開いてコンデンサの記事の続きです。
一ヶ月もあくと、何を話してたかなんて覚えてる訳もないんですけどね。
という訳で前の記事を確認しながらの投稿になります。
まずコンデンサ第一弾のこの記事。
ここではまず、コンデンサの基本的な作用についてお話ししました。
コンデンサの作用や、コンデンサをつなぐ理由について説明がされていました。
次に、写真がいっぱいのこの記事。
ここでは沢山種類のあるコンデンサの中の、一般的、
というよりロボカップジュニアで使いそうなコンデンサについて端的に紹介をしました。
それで今回は、2番目の記事の最後に書いてある通り、コンデンサの実際の使い方について説明をしようと思います。
まず一番目の記事でコンデンサには「電気をためる効果がある」というお話をしました。
ということは当然、「貯められる量」というものがコンデンサにはあるということがわかると思います。
無限に貯められるなんてそんなものあるわけないですからね。もしあれば計画停電なんて起こる筈もないですよね。
という訳で、コンデンサの要素としてまず、電気を貯められる量(静電容量)というものがあることがわかります。
残りのコンデンサの要素ですが、これは周波数特性とか定格電圧とかなので、今は割愛します。
この辺の単語は今度まとめて紹介するとしましょう。
とりあえず今日の記事ではこの静電容量についての説明をします。
この静電容量は抵抗でいうRのようにCという文字で表現されます。単位はF(ファラッド)です。
つまり抵抗Rの値がR=x[Ω]と表せるのであれば、コンデンサCの値はC=x[F]と表することができます。
要するに、このCの値が大きければコンデンサに貯められる電気(電荷)の量が多くなる訳ですね。
それでどこにCの値が書いてあるかというと・・・

普通に書いてありますね。定格電圧が50Vで、その隣に470μFと書いてありました。
μというのはマイクロと読みます。今、巷で話題の「1ミリシーベルトは1000マイクロシーベルトです」のマイクロです。
つまりミリの1000分の1で、1の百万分の1の値ということです。要するに1[F]=1,000,000[μF]という訳です。
要するにこのコンデンサの値は0.00047[F]ということになります。
でも表記がめんどくさいのでμを使って表現しているのです。回路素子ではよくこういった数値表現をします。
とりあえずよく出てくるのが
M(メガ)=百万倍
k(キロ)=1000倍
m(ミリ)=1000分の1
μ(マイクロ)=百万分の1
p(ピコ)=1兆分の1
といったぐらいでしょうか。nとかGとかTとかPとかの他の数詞は普通でてきません。
特にコンデンサの場合は殆どがμとpで表現されています。
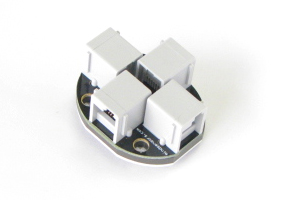
上のような電解コンデンサはμでしたが下のような積層セラミックコンデンサは

基本的にp(とμ)で表現されます。この写真だとコンデンサにちっちゃく104と記載されていますね。
実はこれがCを表していて、上から2桁の10がコンデンサの値(実数部)で次の4仮数部となっています。
なんか抵抗のカラーコードの時に似ていますね。
でもコンデンサの時は基準がpとなっています。
なのでこのコンデンサの値は10×104p[F]=100000p[F]となります。
でもこれだと表記がめんどくさいので1000000倍して0.1μ[F]となる訳です。
(注;100n[F]という表記は使いません。慣例なので理由とか聞かないでください(笑))
まぁコンデンサの表記についてはこんな感じです。
要するに基本的にコンデンサでは何μ[F]なんていう小さい値しか使わないんです。
電解2重層コンデンサとかの場合は1[F]なんていう馬鹿げた値だったりもしますが・・・
という訳で今日の記事は終了です。
書き始めの時にはコンデンサの使い方も書こうと思っていたのですが、長くなったので次回に持ち越しです。
それではーノ
因みに同じ種類のコンデンサなら、その外形の大きさは定格電圧と静電容量に比例している・・・らしい(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s20:51 フリーザー捕まりました(笑)
朝からずっと捕獲ゲーが続いています。所持ボールが少なすぎる・・・(泣)
そんなことはさておき、1ヶ月開いてコンデンサの記事の続きです。
一ヶ月もあくと、何を話してたかなんて覚えてる訳もないんですけどね。
という訳で前の記事を確認しながらの投稿になります。
まずコンデンサ第一弾のこの記事。
ここではまず、コンデンサの基本的な作用についてお話ししました。
コンデンサの作用や、コンデンサをつなぐ理由について説明がされていました。
次に、写真がいっぱいのこの記事。
ここでは沢山種類のあるコンデンサの中の、一般的、
というよりロボカップジュニアで使いそうなコンデンサについて端的に紹介をしました。
それで今回は、2番目の記事の最後に書いてある通り、コンデンサの実際の使い方について説明をしようと思います。
まず一番目の記事でコンデンサには「電気をためる効果がある」というお話をしました。
ということは当然、「貯められる量」というものがコンデンサにはあるということがわかると思います。
無限に貯められるなんてそんなものあるわけないですからね。もしあれば計画停電なんて起こる筈もないですよね。
という訳で、コンデンサの要素としてまず、電気を貯められる量(静電容量)というものがあることがわかります。
残りのコンデンサの要素ですが、これは周波数特性とか定格電圧とかなので、今は割愛します。
この辺の単語は今度まとめて紹介するとしましょう。
とりあえず今日の記事ではこの静電容量についての説明をします。
この静電容量は抵抗でいうRのようにCという文字で表現されます。単位はF(ファラッド)です。
つまり抵抗Rの値がR=x[Ω]と表せるのであれば、コンデンサCの値はC=x[F]と表することができます。
要するに、このCの値が大きければコンデンサに貯められる電気(電荷)の量が多くなる訳ですね。
それでどこにCの値が書いてあるかというと・・・
普通に書いてありますね。定格電圧が50Vで、その隣に470μFと書いてありました。
μというのはマイクロと読みます。今、巷で話題の「1ミリシーベルトは1000マイクロシーベルトです」のマイクロです。
つまりミリの1000分の1で、1の百万分の1の値ということです。要するに1[F]=1,000,000[μF]という訳です。
要するにこのコンデンサの値は0.00047[F]ということになります。
でも表記がめんどくさいのでμを使って表現しているのです。回路素子ではよくこういった数値表現をします。
とりあえずよく出てくるのが
M(メガ)=百万倍
k(キロ)=1000倍
m(ミリ)=1000分の1
μ(マイクロ)=百万分の1
p(ピコ)=1兆分の1
といったぐらいでしょうか。nとかGとかTとかPとかの他の数詞は普通でてきません。
特にコンデンサの場合は殆どがμとpで表現されています。
上のような電解コンデンサはμでしたが下のような積層セラミックコンデンサは
基本的にp(とμ)で表現されます。この写真だとコンデンサにちっちゃく104と記載されていますね。
実はこれがCを表していて、上から2桁の10がコンデンサの値(実数部)で次の4仮数部となっています。
なんか抵抗のカラーコードの時に似ていますね。
でもコンデンサの時は基準がpとなっています。
なのでこのコンデンサの値は10×104p[F]=100000p[F]となります。
でもこれだと表記がめんどくさいので1000000倍して0.1μ[F]となる訳です。
(注;100n[F]という表記は使いません。慣例なので理由とか聞かないでください(笑))
まぁコンデンサの表記についてはこんな感じです。
要するに基本的にコンデンサでは何μ[F]なんていう小さい値しか使わないんです。
電解2重層コンデンサとかの場合は1[F]なんていう馬鹿げた値だったりもしますが・・・
という訳で今日の記事は終了です。
書き始めの時にはコンデンサの使い方も書こうと思っていたのですが、長くなったので次回に持ち越しです。
それではーノ
因みに同じ種類のコンデンサなら、その外形の大きさは定格電圧と静電容量に比例している・・・らしい(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s20:51 フリーザー捕まりました(笑)
最近、なんかどっかでみたとこのある動画が某動画サイトに上がっているとの話を貰って、ちょっと調べてみたのですね。
そしたらこんなものが。
まさか上がってるなんて(笑)
一昨年の高専祭に出展してたリコーダーさんですね。UPは今年の1月みたいです。
若干手伝った記憶もあるのでよく覚えています。
なんてったってロボコンの活動より帰るのが遅くなったりした唯一の活動ですから(笑)
とりあえず産技高専ロボコン部はこんなことをして遊んでいる部活です。
今度メイキング動画の作成もするんだとか・・・5年生って暇だなぁ(笑)
という訳で今日はロボコン部の宣伝でした。
でわでわ~ノ
(^・ω・)ノRadiumProduction in RoboCupJunior
東東京ノードのプレゼンを乗っけてみたり。

制作時間は大体30分ほど。写真撮るのが一番時間食ったりしています。
あとチームロゴっぽいなにかにも相当時間食ってます。∴プレゼンはかなり手抜きです。
30分か・・・プレゼンにあてる時間としては短いのか長いのかは疑問ですが。まぁこんなものでしょう。
でも実はこのファイルをアップロードするほうが時間がかかっています・・・(泣)30分?そんなレベルじゃないorz
まぁそんな感じで力尽きたので今日の記事はこれで終了です。
(^・ω・)ノRadiumProduction in RoboCupJunior
制作時間は大体30分ほど。写真撮るのが一番時間食ったりしています。
あとチームロゴっぽいなにかにも相当時間食ってます。∴プレゼンはかなり手抜きです。
30分か・・・プレゼンにあてる時間としては短いのか長いのかは疑問ですが。まぁこんなものでしょう。
でも実はこのファイルをアップロードするほうが時間がかかっています・・・(泣)30分?そんなレベルじゃないorz
まぁそんな感じで力尽きたので今日の記事はこれで終了です。
(^・ω・)ノRadiumProduction in RoboCupJunior
今は亡きLuz。
今日はそのLuzのロボットについて紹介します。
今年のLuzのロボットは前にも紹介しましたが、
実はあのロボットは東東京ノード終了時点で既に廃棄処分となっていました。
その代わりに作られたのがこのロボットです。
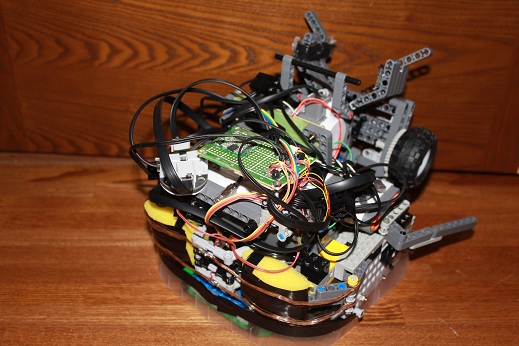
東東京ノードの時よりさらに大きく、うるさくなりました。
まぁ今はもう原型が残っていないんですけどね(笑)
バンプが越えられない旧型のクローラーから離脱。駆動系はタイヤで統一しました。
まぁでも後の機能は旧型と大差ありません。
ところで、このロボット、どうやって缶をつかむかというと・・・
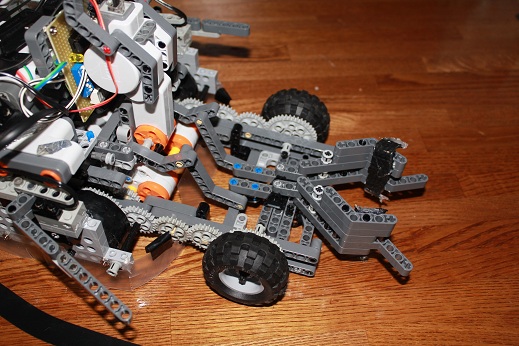
こんな感じです。
後ろに搭載したモーターで可動2輪の可動とアームの開閉を行います。
ギアダウンとかしていないのでアームの可動速度が異常です。もちろん、普通に掴めますよ。
結局今年は、この可動2輪がしたかっただけなんです(笑)ほら、なんかロマンっぽいじゃないですか。
でもその結果、ロボットが大きくなりすぎて
可動2輪の尻尾がライントレース中に壁にぶつかりまくり、競技進行停止の嵐。
只でさえ大きくてギリギリなのに、
前日に起きた故障の修正をした際に回転軸が以前より前になってしまったのも痛いです。
でも、ぶっっちゃけ可動2輪とアーム外したら普通にライントレースして
それで十分ジャパンオープン選考内に入ることはできました。
でもなんかそれで勝ってもつまんないなーと思い、このまま突撃しました。
まぁ今回の大会はそんな感じです。ちょっと遊びすぎたかなー(笑)
といった経緯で関東ブロックで玉砕してきました。いつも通りの結果ですね(笑)
来年こそはウン年ぶりにジャパンオープンに出場できたらと考えています。
世界大会といいたいのですがちょっと現実みようよ。って感じですかね(笑)
それでは今日はこの辺で。
明日から電気工事士試験の講習だ・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
今日はそのLuzのロボットについて紹介します。
今年のLuzのロボットは前にも紹介しましたが、
実はあのロボットは東東京ノード終了時点で既に廃棄処分となっていました。
その代わりに作られたのがこのロボットです。
東東京ノードの時よりさらに大きく、うるさくなりました。
まぁ今はもう原型が残っていないんですけどね(笑)
バンプが越えられない旧型のクローラーから離脱。駆動系はタイヤで統一しました。
まぁでも後の機能は旧型と大差ありません。
ところで、このロボット、どうやって缶をつかむかというと・・・
こんな感じです。
後ろに搭載したモーターで可動2輪の可動とアームの開閉を行います。
ギアダウンとかしていないのでアームの可動速度が異常です。もちろん、普通に掴めますよ。
結局今年は、この可動2輪がしたかっただけなんです(笑)ほら、なんかロマンっぽいじゃないですか。
でもその結果、ロボットが大きくなりすぎて
可動2輪の尻尾がライントレース中に壁にぶつかりまくり、競技進行停止の嵐。
只でさえ大きくてギリギリなのに、
前日に起きた故障の修正をした際に回転軸が以前より前になってしまったのも痛いです。
でも、ぶっっちゃけ可動2輪とアーム外したら普通にライントレースして
それで十分ジャパンオープン選考内に入ることはできました。
でもなんかそれで勝ってもつまんないなーと思い、このまま突撃しました。
まぁ今回の大会はそんな感じです。ちょっと遊びすぎたかなー(笑)
といった経緯で関東ブロックで玉砕してきました。いつも通りの結果ですね(笑)
来年こそはウン年ぶりにジャパンオープンに出場できたらと考えています。
世界大会といいたいのですがちょっと現実みようよ。って感じですかね(笑)
それでは今日はこの辺で。
明日から電気工事士試験の講習だ・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
昨日、NHK高専ロボコン2011のルールが発表されました。
今年の競技は・・・
『ロボ・ボウル』
要するにロボットと人間でアメフト+ポートボールのような競技をするらしいのです。
え?高専生に運動させるとか危ないんじゃないの?大丈夫かなぁ・・・
とりあえず1チームは高専生二人とロボット2台。ロボットはオフェンス用が1台、ディフェンス用が1台
オフェンスは2足ですがディフェンスは移動方法に制限がないそうです。
それで高専生の役割は一人が競技開始時にオフェンスロボットにボールを渡す役
もう一人がポートボールでいうゴール役ですね。
つまり高専生がオフェンスロボットにボールを渡し、
そのオフェンスロボットが相手のディフェンスロボットをかわして。
ゴールであるもう一人の高専生にボールをダイレクトでシュートするという競技のようです。絶対危ないって!
しかも使用するボールが、どうやらアメフトボールのようなんですね。

アメフトボールってあれ投げたことある人じゃないとわからないんですが、
うまく回転かけないとまっすぐ飛ばすことすらできないんですよ。
球技かぁ・・・ロボカップが終わった直後にこれだよ・・・ここからが忙しくなりそうです。
因みに今年の関東甲信越ブロックの会場は山梨だってさ。
東京高専が主催の筈なのになんで?しかも電車で2時間という情報があるから泊りじゃ・・・ない?
(^・ω・)ノRadiumProduction in RoboCupJunior
今年の競技は・・・
『ロボ・ボウル』
要するにロボットと人間でアメフト+ポートボールのような競技をするらしいのです。
え?高専生に運動させるとか危ないんじゃないの?大丈夫かなぁ・・・
とりあえず1チームは高専生二人とロボット2台。ロボットはオフェンス用が1台、ディフェンス用が1台
オフェンスは2足ですがディフェンスは移動方法に制限がないそうです。
それで高専生の役割は一人が競技開始時にオフェンスロボットにボールを渡す役
もう一人がポートボールでいうゴール役ですね。
つまり高専生がオフェンスロボットにボールを渡し、
そのオフェンスロボットが相手のディフェンスロボットをかわして。
ゴールであるもう一人の高専生にボールをダイレクトでシュートするという競技のようです。絶対危ないって!
しかも使用するボールが、どうやらアメフトボールのようなんですね。
アメフトボールってあれ投げたことある人じゃないとわからないんですが、
うまく回転かけないとまっすぐ飛ばすことすらできないんですよ。
球技かぁ・・・ロボカップが終わった直後にこれだよ・・・ここからが忙しくなりそうです。
因みに今年の関東甲信越ブロックの会場は山梨だってさ。
東京高専が主催の筈なのになんで?しかも電車で2時間という情報があるから泊りじゃ・・・ない?
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
(01/01)
(05/07)
(01/11)
プロフィール
HN:
Luz
性別:
男性
アーカイブ