RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
という訳で2週間前になりました。そろそろ大詰めですね。
産技高専のロボカップ部のメンバーはと言うと・・・
ロボット作る余裕がありません(笑)
あるチームはチームメンバーの件で忙しく、
またあるチームは学校のレポートで詰み、
またあるチームはカメラを抱え、大手町へ、
またあるチームは某kiwiなんたらに呼び出されて秋葉原へ。
その上うちのチームは前の記事でも書いたように、
RXMux・・・つまりNXT用のRCXセンサーのマルチプレクサーがお亡くなりになられました。
切り替えができないどころか、4ポート全部が導通している状態です(笑)
つまり5000円でRCXセンサー変換ケーブルを買ったのと同じようなものですorz
結局何の前触れもなく壊れたので原因は不明です。今度メーカーに問い合わせてみよう・・・。
ただでさえDISTの件や、別のRXMUXの件でも問い合わせているのに、
更に問い合わせをするという鬼畜な状態になっていますが・・・すぐに壊れるセンサーの方が悪いんだよね!?
そもそも買った時点で端子部分で接触不良が相次いでいる不良品だったので、
「壊れた」のではなく「壊れていた」のかもしれませんが・・・
まぁ今となってはどうでもいいことです。とりあえず早く換えくださいな。
といっても、絶対でてこない気もしますけどね。
某スイスや韓国のネット通販で売っているのは見かけたのですが、
せめて英語で書いてくれ。買い方がわからない(泣)そもそもこいつらちゃんと日本に送ってくれるのか?
グーグル先生に助力を頼みましたが、結論として「怪しい」ということ以外何もわかりませんでした。
・・・。という訳で。
マルチプレクサー基、それにくっついているセンサーの大多数を切り捨てることに致しました。
正直これで動くか怪しいけどね!ライントレースくらいはできるよね!
まぁ一応センサー配置を今日全部組み直したので、
一応今までの動作に支障がない程度にセンサーを活かすことが出来ましたけど・・・
さて。これ、動くかなぁ。
非常に怪しいですか、とりあえずはコレで頑張ってみます。
もしかしたらDISTが帰ってくるかもしれません(笑)
という訳でこの1週間は結構残念な戦いが展開されそうです。
それではまた、
そうそう、遊び半分にネットと過去のプレゼンを使い、今年のレスキューセカンダリチームの情報収集をしていたら
現段階で25チーム中23チームの所属と大体のレベルが割れてしまいました(笑)
ネット社会って怖いね!
(^・ω・)ノ RadiumProduction in RoboCup Junior
産技高専のロボカップ部のメンバーはと言うと・・・
ロボット作る余裕がありません(笑)
あるチームはチームメンバーの件で忙しく、
またあるチームは学校のレポートで詰み、
またあるチームはカメラを抱え、大手町へ、
またあるチームは某kiwiなんたらに呼び出されて秋葉原へ。
その上うちのチームは前の記事でも書いたように、
RXMux・・・つまりNXT用のRCXセンサーのマルチプレクサーがお亡くなりになられました。
切り替えができないどころか、4ポート全部が導通している状態です(笑)
つまり5000円でRCXセンサー変換ケーブルを買ったのと同じようなものですorz
結局何の前触れもなく壊れたので原因は不明です。今度メーカーに問い合わせてみよう・・・。
ただでさえDISTの件や、別のRXMUXの件でも問い合わせているのに、
更に問い合わせをするという鬼畜な状態になっていますが・・・すぐに壊れるセンサーの方が悪いんだよね!?
そもそも買った時点で端子部分で接触不良が相次いでいる不良品だったので、
「壊れた」のではなく「壊れていた」のかもしれませんが・・・
まぁ今となってはどうでもいいことです。とりあえず早く換えくださいな。
といっても、絶対でてこない気もしますけどね。
某スイスや韓国のネット通販で売っているのは見かけたのですが、
せめて英語で書いてくれ。買い方がわからない(泣)そもそもこいつらちゃんと日本に送ってくれるのか?
グーグル先生に助力を頼みましたが、結論として「怪しい」ということ以外何もわかりませんでした。
・・・。という訳で。
マルチプレクサー基、それにくっついているセンサーの大多数を切り捨てることに致しました。
正直これで動くか怪しいけどね!ライントレースくらいはできるよね!
まぁ一応センサー配置を今日全部組み直したので、
一応今までの動作に支障がない程度にセンサーを活かすことが出来ましたけど・・・
さて。これ、動くかなぁ。
非常に怪しいですか、とりあえずはコレで頑張ってみます。
もしかしたらDISTが帰ってくるかもしれません(笑)
という訳でこの1週間は結構残念な戦いが展開されそうです。
それではまた、
そうそう、遊び半分にネットと過去のプレゼンを使い、今年のレスキューセカンダリチームの情報収集をしていたら
現段階で25チーム中23チームの所属と大体のレベルが割れてしまいました(笑)
ネット社会って怖いね!
(^・ω・)ノ RadiumProduction in RoboCup Junior
今日の死亡センサー報告です。
今日はこのRCXマルチプレクサーがお亡くなりになられましたorz

これ・・・もう生産終了しているんだよね。
完璧に応答がないという残念な事態に。昨日まで元気だったのに・・・
どうせ死んでるなら・・・ということで、今から一か八かの荒療治大作戦が決行されることになりました。
これで治ったら笑うな・・・
とりあえず今からやってみよー
(^・ω・)ノ RadiumProduction in RoboCup Junior
P.s 結果:治らず。
ICそのものが逝ったっぽいです(笑)
従って今年の大会が御詰みになられました。
11/6:直しました(笑)
今日はこのRCXマルチプレクサーがお亡くなりになられましたorz
これ・・・もう生産終了しているんだよね。
完璧に応答がないという残念な事態に。昨日まで元気だったのに・・・
どうせ死んでるなら・・・ということで、今から一か八かの荒療治大作戦が決行されることになりました。
これで治ったら笑うな・・・
とりあえず今からやってみよー
(^・ω・)ノ RadiumProduction in RoboCup Junior
P.s 結果:治らず。
ICそのものが逝ったっぽいです(笑)
従って今年の大会が御詰みになられました。
11/6:直しました(笑)
というのがコチラの一品

以前の記事でも紹介しましたが、GP2Y0A21YKを利用した測距センサーです。
大体10cm~80cmの付近の値を取得することができます。
が、今回は対象物との距離を測ることが目的ではなく、対象物自体を検出することのみを目的としているため、
アナログではなく、デジタルのセンサーとして作ることにしました。
そしてこのセンサー、一番の特徴が・・・
基板が小さい。

そしてこの裏に付いている可変抵抗器で、検出距離を変化させています。
つまり、ここを回すことで検知する距離が変わるということです。
レスキューでは被災者の検出をする際は、
基本的に遠距離センサーの値は一度指定したら変えることは殆ど無いのでコレで差し支えないわけですね。
また、これはI2C等の通信は一切使用していないので検出速度が速いです。
それにファームなどというめんどくさい問題も起こらないので非常に使いやすいです。
なにより小さいしね!
どこぞの8000円のセンサーとは出来が違いますよ(笑)
端子は基本的に元のセンサーが電源を必要とするのでNXTの端子である必要があります。
まぁNXT端子から電源さえ取れればいいので、センサーの読み込み自体はRCX端子でも可です。
そういう訳なので、自分のロボットにくっついているのはRCXとNXTの両端子が伸びている、
非常に気持ち悪い状態になっています。
まだ試験段階ですが、今日ロボットにプログラムを入れて、実際に動かしたところ、特に問題は見られませんね。
十分実用に耐えられるレベルであると思われます(笑)
まぁコレを作ったのも、某8000円のセンサーが揃いも揃って使い物にならないからなんですけどね・・・。
自作したらあっというまにできたという・・・俺の高専祭での努力と絶望と8000円返せ!
という訳で高専祭は終了しましたが、
とある産技の自律電脳では、これも販売(笑)しようという方向で今調整を進めています。
(笑)ですので小規模ではございますが、今のところ3000円で買ってみたいなぁと思われる方は
toaru_sangi_no_rcj@yahoo.co.jp
まで連絡お願い致します。
まさかここまでうまくいくとは思わなかった・・・(笑)
そんな感動を覚えつつ、今日の帰りにサッカーの最強のロボットについて議論したのですが、
その結果、
カボチャで作った本体からきゅうりのシューターで液体窒素で凍らせたトマトを打ち出して
相手のロボットが冷気によって撹乱されているうちにボールを奪ってシュートすれば最強じゃね?
という結論に至りました。
どうしてこういう結論に至ったかが気になる方は、今すぐうちの学校の願書を書くことをお勧めします(笑)
高専生ってこんなのなんだよ♪
それでは。
(^・ω・)ノ RadiumProduction in RoboCup Junior
以前の記事でも紹介しましたが、GP2Y0A21YKを利用した測距センサーです。
大体10cm~80cmの付近の値を取得することができます。
が、今回は対象物との距離を測ることが目的ではなく、対象物自体を検出することのみを目的としているため、
アナログではなく、デジタルのセンサーとして作ることにしました。
そしてこのセンサー、一番の特徴が・・・
基板が小さい。
そしてこの裏に付いている可変抵抗器で、検出距離を変化させています。
つまり、ここを回すことで検知する距離が変わるということです。
レスキューでは被災者の検出をする際は、
基本的に遠距離センサーの値は一度指定したら変えることは殆ど無いのでコレで差し支えないわけですね。
また、これはI2C等の通信は一切使用していないので検出速度が速いです。
それにファームなどというめんどくさい問題も起こらないので非常に使いやすいです。
なにより小さいしね!
どこぞの8000円のセンサーとは出来が違いますよ(笑)
端子は基本的に元のセンサーが電源を必要とするのでNXTの端子である必要があります。
まぁNXT端子から電源さえ取れればいいので、センサーの読み込み自体はRCX端子でも可です。
そういう訳なので、自分のロボットにくっついているのはRCXとNXTの両端子が伸びている、
非常に気持ち悪い状態になっています。
まだ試験段階ですが、今日ロボットにプログラムを入れて、実際に動かしたところ、特に問題は見られませんね。
十分実用に耐えられるレベルであると思われます(笑)
まぁコレを作ったのも、某8000円のセンサーが揃いも揃って使い物にならないからなんですけどね・・・。
自作したらあっというまにできたという・・・俺の高専祭での努力と絶望と8000円返せ!
という訳で高専祭は終了しましたが、
とある産技の自律電脳では、これも販売(笑)しようという方向で今調整を進めています。
(笑)ですので小規模ではございますが、今のところ3000円で買ってみたいなぁと思われる方は
toaru_sangi_no_rcj@yahoo.co.jp
まで連絡お願い致します。
まさかここまでうまくいくとは思わなかった・・・(笑)
そんな感動を覚えつつ、今日の帰りにサッカーの最強のロボットについて議論したのですが、
その結果、
カボチャで作った本体からきゅうりのシューターで液体窒素で凍らせたトマトを打ち出して
相手のロボットが冷気によって撹乱されているうちにボールを奪ってシュートすれば最強じゃね?
という結論に至りました。
どうしてこういう結論に至ったかが気になる方は、今すぐうちの学校の願書を書くことをお勧めします(笑)
高専生ってこんなのなんだよ♪
それでは。
(^・ω・)ノ RadiumProduction in RoboCup Junior
前回までのあらすじ。
前回は関数ってなんだろなーという話から進展し、
Cにおける関数作成の流れのようなものを説明致しました。
といってもなんのこっちゃかわからない説明になりましたが・・・
という訳で今日は前回告知したように、実際に適当に関数を作って説明でもしようと思います。
今日は一先ず、与えられた値の2倍の値を返すtimeという関数でもつくってみることにしましょう。地震だー
まず、関数の宣言、これはこのように宣言します。茨城北部かぁ
int time(int num);
これでint型の関数timeが宣言されました。震度3?うそこけ!
変数の宣言と似ていますよね。茨城で震度4?
因みに()内のint numですが、
これは仮引数といってmainの関数からデータを受け取るときに受け取り先となる変数です。
この関数内であれば普通の変数として使用ができます。震源は茨城南部かぁ
次に関数の定義です。今回は与えられた数を2倍にする関数なのでこのような感じになります。
int time(int num)
{
return num*2;
}
関数はこんな感じに定義することになります。M4.1ね
returnというのは戻り値といってこの関数がmainに返す値・・・つまり結果的に示す値となります。
この場合はnum*2となっていますのでnumの値の2倍の値が返されることになります。
最後に関数の呼び出し。
このように表記されます。
x=time(x);
変数xにtime関数の値を代入するということになります。
ここで()内のxは実引数といって、ここのxの値が引数として関数の方に(ここでは変数numに)送られます。
ここでこれを実際のプログラムにしてみましょう。23区は震度3ですね
このような感じになります
#include "stdio.h"
int time(int num);
int main(void)
{
int x;
printf("xの入力");
scanf("%d",&x);
x=time(x);
printf("x=%d",x);
return0;
}
int time(int num)
{
return num*2;
}
外部から整数xを入力することで、xの2倍の数を表示するプログラムになります。
まず関数timeを最初に宣言して、次にmain関数がきて、その中で変数xを定義、scanfで入力、
そして関数timeを呼び出します。そして関数time内で引数として送られてきたxの値を変数numに代入し、
そのnumの値を2倍したものを関数timeの値としてreturnでmain関数に返します。
それをまたxに再代入して、pirntfで出力しています。
とりあえず関数の使い方としてはこんな感じです。
また、複数の変数を引数として使いたい場合は
int time(int a,int b)
のような具合にプログラムします。
また、変数と同じように戻り値として使用したい数字の型によって関数の型を変更することができます。
戻り値を使わない関数の場合はvoid型という型を使用することも出来ます。
というわけで関数の説明は以上になります。
次は・・・なんだろう、配列ってやったっけ?(笑)
配列かポインタのどちらかになるかと思われます。
それではまた。
(^・ω・)ノ RadiumProduction in RoboCup Junior
前回は関数ってなんだろなーという話から進展し、
Cにおける関数作成の流れのようなものを説明致しました。
といってもなんのこっちゃかわからない説明になりましたが・・・
という訳で今日は前回告知したように、実際に適当に関数を作って説明でもしようと思います。
今日は一先ず、与えられた値の2倍の値を返すtimeという関数でもつくってみることにしましょう。地震だー
まず、関数の宣言、これはこのように宣言します。茨城北部かぁ
int time(int num);
これでint型の関数timeが宣言されました。震度3?うそこけ!
変数の宣言と似ていますよね。茨城で震度4?
因みに()内のint numですが、
これは仮引数といってmainの関数からデータを受け取るときに受け取り先となる変数です。
この関数内であれば普通の変数として使用ができます。震源は茨城南部かぁ
次に関数の定義です。今回は与えられた数を2倍にする関数なのでこのような感じになります。
int time(int num)
{
return num*2;
}
関数はこんな感じに定義することになります。M4.1ね
returnというのは戻り値といってこの関数がmainに返す値・・・つまり結果的に示す値となります。
この場合はnum*2となっていますのでnumの値の2倍の値が返されることになります。
最後に関数の呼び出し。
このように表記されます。
x=time(x);
変数xにtime関数の値を代入するということになります。
ここで()内のxは実引数といって、ここのxの値が引数として関数の方に(ここでは変数numに)送られます。
ここでこれを実際のプログラムにしてみましょう。23区は震度3ですね
このような感じになります
#include "stdio.h"
int time(int num);
int main(void)
{
int x;
printf("xの入力");
scanf("%d",&x);
x=time(x);
printf("x=%d",x);
return0;
}
int time(int num)
{
return num*2;
}
外部から整数xを入力することで、xの2倍の数を表示するプログラムになります。
まず関数timeを最初に宣言して、次にmain関数がきて、その中で変数xを定義、scanfで入力、
そして関数timeを呼び出します。そして関数time内で引数として送られてきたxの値を変数numに代入し、
そのnumの値を2倍したものを関数timeの値としてreturnでmain関数に返します。
それをまたxに再代入して、pirntfで出力しています。
とりあえず関数の使い方としてはこんな感じです。
また、複数の変数を引数として使いたい場合は
int time(int a,int b)
のような具合にプログラムします。
また、変数と同じように戻り値として使用したい数字の型によって関数の型を変更することができます。
戻り値を使わない関数の場合はvoid型という型を使用することも出来ます。
というわけで関数の説明は以上になります。
次は・・・なんだろう、配列ってやったっけ?(笑)
配列かポインタのどちらかになるかと思われます。
それではまた。
(^・ω・)ノ RadiumProduction in RoboCup Junior
ちょっと前に話題にしたコレ

SHARP製の測距モジュール、GP2Y0A21YKです。
今日はこれをNXTに繋いで見ました。
元はアナログセンサーなのですが、今回は、レスキューで缶をみるのに使おうと考えていたので、
アナログ値ではなく、普通にデジタルのセンサーとして使うことに。
一昨日、いうことを聞かないDISTの代わりになるかなぁと思い、適当な感じで回路図を作成し、
今日一年生が部品を買ってきたのでちゃんと作ってみたのですが・・・
案外いけるね。普通に見れそうです。
とりあえずロボットに搭載してみようと思います。なんか副部長がお持ち帰りしていましたけど・・・
よし、これで2階のセンサーはできましたね。あとはプログラムだけ・・・
なんてフラグのような発言を残しておいて、今日の記事はこれにて終了です。
(^・ω・)ノ RadiumProduction in RoboCup Junior
SHARP製の測距モジュール、GP2Y0A21YKです。
今日はこれをNXTに繋いで見ました。
元はアナログセンサーなのですが、今回は、レスキューで缶をみるのに使おうと考えていたので、
アナログ値ではなく、普通にデジタルのセンサーとして使うことに。
一昨日、いうことを聞かないDISTの代わりになるかなぁと思い、適当な感じで回路図を作成し、
今日一年生が部品を買ってきたのでちゃんと作ってみたのですが・・・
案外いけるね。普通に見れそうです。
とりあえずロボットに搭載してみようと思います。なんか副部長がお持ち帰りしていましたけど・・・
よし、これで2階のセンサーはできましたね。あとはプログラムだけ・・・
なんてフラグのような発言を残しておいて、今日の記事はこれにて終了です。
(^・ω・)ノ RadiumProduction in RoboCup Junior
とりあえず写真をまとめてみました。
まずは本部のPC
ネットブックってあたりにやるきのなさを感じますね。因みに僕の私物です。
ピリオドが打てない噂の一物ですね。これ打てないとプログラムで困るんですよね・・・
次に1日目、サッカーの時の会場です。

今回は1教室を使ってサッカーとレスキュー両方を行う必要があったので日を分けて行いました。
因みにSkypeの中継はこんなところで。

一番の集客の要はこの子であったことは疑う余地がありませんね。よく頑張った(笑)
そして試合が行われるわけですが・・・。
大会前なのでロボットの写真は非公開ということで(笑)
ほら、高専の残念なロボットだけならともかく、たくさん優秀なロボットがでていますから・・・
とりあえずこの写真だけ掲載しましょう。

一試合終わった後の得点の結果なのですが・・・凄いですよね。得点表に書き切れない・・・だと?
これが高専生ごめんなさいの理由というわけです。
そしてこれとコレの真実もこういうわけです。
まぁこれに関しては本人達も深く傷ついている(と有難い)ので今は一先ずお流しということで・・・
2日目のレスキューに行きましょう。といってもレスキューはチームも多く、運営も忙しかったので
ほとんど写真は撮れていません(笑)
という訳で高専祭開始前の写真が出てくるわけですね。
朝7:30。コース作成時の写真です。

避難場所があるのはギャップの20cmを測る目安にする為です。
ここだけのはなし、これを基準に作ったら
実はさりげなーく23cmのギャップができていたという事実が1回目の競技後に浮き彫りになりました(笑)
ちなみにコースはこんな感じ。2011の東東京ノードをちょっと難しくした感じですね。

バンプが4つ。典型的なバンプコースですね。
串は2階のみ、2試合目に巻きました。1階に巻くと後処理が大変なので・・・。
また、左上ですが、ストップウォッチが面倒だったのでサッカーの得点板をそのまま流用しました(笑)
因みに得点計算もこの子(の後ろに座っている子)が頑張ってくれていました。
まぁこんな感じのコースをみんなで走っていたというわけです。
とりあえず写真はこんなものかな。
それではこのへんでノ
(^・ω・)ノ RadiumProduction in RoboCup Junior
まずは本部のPC
ネットブックってあたりにやるきのなさを感じますね。因みに僕の私物です。
ピリオドが打てない噂の一物ですね。これ打てないとプログラムで困るんですよね・・・
次に1日目、サッカーの時の会場です。
今回は1教室を使ってサッカーとレスキュー両方を行う必要があったので日を分けて行いました。
因みにSkypeの中継はこんなところで。
一番の集客の要はこの子であったことは疑う余地がありませんね。よく頑張った(笑)
そして試合が行われるわけですが・・・。
大会前なのでロボットの写真は非公開ということで(笑)
ほら、高専の残念なロボットだけならともかく、たくさん優秀なロボットがでていますから・・・
とりあえずこの写真だけ掲載しましょう。
一試合終わった後の得点の結果なのですが・・・凄いですよね。得点表に書き切れない・・・だと?
これが高専生ごめんなさいの理由というわけです。
そしてこれとコレの真実もこういうわけです。
まぁこれに関しては本人達も深く傷ついている(と有難い)ので今は一先ずお流しということで・・・
2日目のレスキューに行きましょう。といってもレスキューはチームも多く、運営も忙しかったので
ほとんど写真は撮れていません(笑)
という訳で高専祭開始前の写真が出てくるわけですね。
朝7:30。コース作成時の写真です。
避難場所があるのはギャップの20cmを測る目安にする為です。
ここだけのはなし、これを基準に作ったら
実はさりげなーく23cmのギャップができていたという事実が1回目の競技後に浮き彫りになりました(笑)
ちなみにコースはこんな感じ。2011の東東京ノードをちょっと難しくした感じですね。
バンプが4つ。典型的なバンプコースですね。
串は2階のみ、2試合目に巻きました。1階に巻くと後処理が大変なので・・・。
また、左上ですが、ストップウォッチが面倒だったのでサッカーの得点板をそのまま流用しました(笑)
因みに得点計算もこの子(の後ろに座っている子)が頑張ってくれていました。
まぁこんな感じのコースをみんなで走っていたというわけです。
とりあえず写真はこんなものかな。
それではこのへんでノ
(^・ω・)ノ RadiumProduction in RoboCup Junior
10月のアクセス調査結果が出ました。
まずはいつもどおり、アクセスワードランキングからです。
このような結果となりました。今まで2位安定だったロボカップが今回遂に3位に落下しました。
代わりに2位に踊りでたのがランキング初参戦のRCXです。古参Mindstormの意地を見せるか!?
10月は割りとRCXのロボットを紹介したとか、そういった経緯は特にないはずなのですが、
なぜかここに来て高順位に割り込んできました。
まぁそれでもNXTには及ばず、といったところでしょうね。
そして4位が・・・「使い方」?
要するにあれですよ。「◯◯ 使い方」みたいな検索をした場合、◯◯の部分は人によって違っても、
「使い方」の部分は一緒になるから・・・ってことでしょうね。こっちだけが数が増えちゃってこうなったのでしょう。
要するに10月に入って、「素子やらなんやらの使い方を調べていて、ここに辿りついた方」
が割と多くなったということでしょうね。今までランクインすらしていませんでしたから・・・
5位の図記号も同じ理由でしょう。例えば「ダイオード 図記号」とか「トランジスタ 図記号」とか・・・
因みに今まで常連だったコンデンサですが、今回は8位と順位を大きく落としました。
まぁコンデンサの記事を書いたのはもう何ヶ月も前のことですから・・・
ランキングはこんな具合です。
お次は今日の予備調査。
今日は・・・国、言語です。
8月にもやったのでかぶっているのですけど、今回ちょっと気になったので今月もこれを行います。
と、いうのも・・・
国、言語の欄に日本語とか、英語とか、中国語が並んでいる間に・・・
*
こんな言語の欄があるんです。こんな言語あったっけ?
しかも4件ほどのアクセスが確認されました。
これ・・・一体何?
調べてみたけどわかんないー。
一体何なんでしょうね。
というのが今日の記事でした。
因みに今日の部活ですが、
寝坊して、疲れて、部品2個外して、バンプでガッガッして、ライン外れて、解決しなくて、寝て、サッカーロボット動かして、
終わりました。
以上ダイジェストでお送りしましたー。
それでは。
(^・ω・)ノ RadiumProduction in RoboCup Junior
まずはいつもどおり、アクセスワードランキングからです。
| 順位 | ワード | 数 |
| 1 | NXT,nxt | 64 |
| 2 | RCX、rcx | 21 |
| 3 | ロボカップ | 15 |
| 4 | 使い方 | 14 |
| 5 | 図記号 | 12 |
このような結果となりました。今まで2位安定だったロボカップが今回遂に3位に落下しました。
代わりに2位に踊りでたのがランキング初参戦のRCXです。古参Mindstormの意地を見せるか!?
10月は割りとRCXのロボットを紹介したとか、そういった経緯は特にないはずなのですが、
なぜかここに来て高順位に割り込んできました。
まぁそれでもNXTには及ばず、といったところでしょうね。
そして4位が・・・「使い方」?
要するにあれですよ。「◯◯ 使い方」みたいな検索をした場合、◯◯の部分は人によって違っても、
「使い方」の部分は一緒になるから・・・ってことでしょうね。こっちだけが数が増えちゃってこうなったのでしょう。
要するに10月に入って、「素子やらなんやらの使い方を調べていて、ここに辿りついた方」
が割と多くなったということでしょうね。今までランクインすらしていませんでしたから・・・
5位の図記号も同じ理由でしょう。例えば「ダイオード 図記号」とか「トランジスタ 図記号」とか・・・
因みに今まで常連だったコンデンサですが、今回は8位と順位を大きく落としました。
まぁコンデンサの記事を書いたのはもう何ヶ月も前のことですから・・・
ランキングはこんな具合です。
お次は今日の予備調査。
今日は・・・国、言語です。
8月にもやったのでかぶっているのですけど、今回ちょっと気になったので今月もこれを行います。
と、いうのも・・・
国、言語の欄に日本語とか、英語とか、中国語が並んでいる間に・・・
*
こんな言語の欄があるんです。こんな言語あったっけ?
しかも4件ほどのアクセスが確認されました。
これ・・・一体何?
調べてみたけどわかんないー。
一体何なんでしょうね。
というのが今日の記事でした。
因みに今日の部活ですが、
寝坊して、疲れて、部品2個外して、バンプでガッガッして、ライン外れて、解決しなくて、寝て、サッカーロボット動かして、
終わりました。
以上ダイジェストでお送りしましたー。
それでは。
(^・ω・)ノ RadiumProduction in RoboCup Junior
そういえば、ジュニアジャパンのサイトにこんなフラッシュがありましたよね。
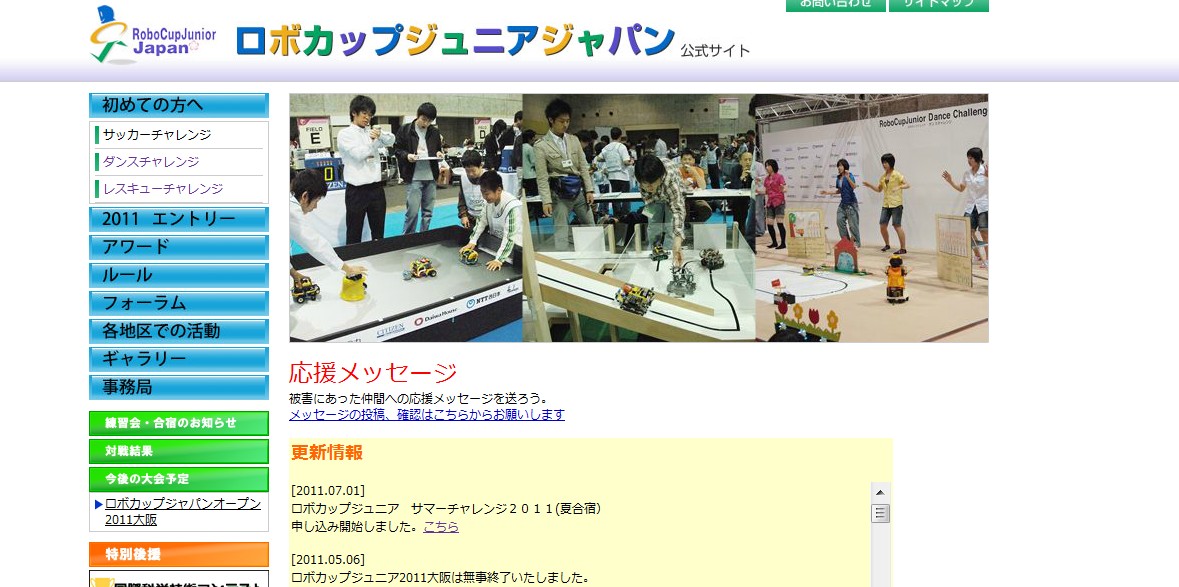
これなんですが、産技祭でちょっと話題になっていたんです。
それがここ、

レスキューの部分なのですが、
今はもう、一人では基本参加できませんよね・・・?
ブロックまでの対応に関しては各ブロックに一任されていますが、
一先ず関東圏ではノード単位でも参加できないところもありますよね・・・
詐欺はいけないと思います!(笑)
今日はそんなネタです。
(^・ω・)ノ RadiumProduction in RoboCup Junior
追記:関東ブロックとしての対応は「参加できない」ではなく上位大会への推薦権がないだけのようです。
一応ノードには参加はできるけど・・・。制約付きですからねぇ。
これなんですが、産技祭でちょっと話題になっていたんです。
それがここ、
レスキューの部分なのですが、
今はもう、一人では基本参加できませんよね・・・?
ブロックまでの対応に関しては各ブロックに一任されていますが、
一先ず関東圏ではノード単位でも参加できないところもありますよね・・・
詐欺はいけないと思います!(笑)
今日はそんなネタです。
(^・ω・)ノ RadiumProduction in RoboCup Junior
追記:関東ブロックとしての対応は「参加できない」ではなく上位大会への推薦権がないだけのようです。
一応ノードには参加はできるけど・・・。制約付きですからねぇ。
産技祭お疲れ様でした。
ロボカップ有志、とある産技の自律電脳は大盛況で幕を閉じることが出来ました。ありがとうございました。

とある産技の自律電脳ですが、
今回はセンサーの販売と、プチ競技会のような何かを行いました。
まずは一日目のサッカー。
まずは高専チームはごめんなさいする必要がありそうですね。
壊滅しました。しかも審判もできないし・・・
結局審判はレスキュー担当の副部長が審判をしなくてはならないという惨状に発展しました。
まぁ3チームしか居なかったからなんとかなったんだよね。ウン。
これでチーム数多かったら終わってたな・・・。運営の問題を華麗に隠蔽した形となりました。
また、なんとなく個人的にやってみかったので、WEBカメラとSkypeを利用して、
部屋の外(つまり廊下)に映像を中継するシステムを搭載したのですが・・・
信じられない自体が。
学校の回線を利用していたのですが、高専祭委員会が
学校中のモニターで一斉にステージのユーストリーム生配信をやったおかげで、めちゃくちゃ回線が重たく、
まともに中継ができませんでした(笑)
あー事故ったー(笑)
そして2日目のレスキュー。
僕がディスられました。(いろんな意味で)
参加者なんだけどなぁ・・・調整時間が存在しませんでした。
割りと副部長も焦っていてそれどころではなかったので、僕が色々と事故っていました。
まず運営の都合上、本部をパドックにしていましたからね。本大会では考えられませんね。
しかも1回目の競技、ロボットがまともに動かなかった・・・周りの視線が冷たいです・・・
そして2回目は・・・なんとか、まがいなりにも・・・と言った感じでしょうか。缶置いてないけど。
明らかな完成度の低さを露呈した形となりました(笑)
しかも今日の運営の事故が多発、結構副部長に迷惑かけましたね。
因みにSkypeの中継だけは昨日の反省を生かして、外部のEモバイル回線を利用したので結構綺麗・・・
というより、とりあえず滑らかに動くようになりました。昨日カクカクだったもんね・・・
まぁ進歩といえばそれくらいでしたね。事故には変わりない・・・。
それでもなんとか競技会は成立。センサー販売の方も黒字になりました。
因みにセンサーの方ですが、販売自体は今後もトゥルースを中心に行なっていきますので、
注文をしたい場合、または、なにか問題が起きた場合は直接僕に連絡するか、
toaru_sangi_no_rcj☆yahoo.co.jp(☆を@に変更)
までメールを送信して頂けると良い返事が帰ってきますよ。きっと。
という訳で今日はこのへんで。明日からは部活です(笑)
(^・ω・)ノ RadiumProduction in RoboCup Junior
P.s此方のブログに「もう、あとほんのちょっとだげ、◯◯」な自律電脳の記事が掲載されています(笑)
ロボカップ有志、とある産技の自律電脳は大盛況で幕を閉じることが出来ました。ありがとうございました。
とある産技の自律電脳ですが、
今回はセンサーの販売と、プチ競技会のような何かを行いました。
まずは一日目のサッカー。
まずは高専チームはごめんなさいする必要がありそうですね。
壊滅しました。しかも審判もできないし・・・
結局審判はレスキュー担当の副部長が審判をしなくてはならないという惨状に発展しました。
まぁ3チームしか居なかったからなんとかなったんだよね。ウン。
これでチーム数多かったら終わってたな・・・。運営の問題を華麗に隠蔽した形となりました。
また、なんとなく個人的にやってみかったので、WEBカメラとSkypeを利用して、
部屋の外(つまり廊下)に映像を中継するシステムを搭載したのですが・・・
信じられない自体が。
学校の回線を利用していたのですが、高専祭委員会が
学校中のモニターで一斉にステージのユーストリーム生配信をやったおかげで、めちゃくちゃ回線が重たく、
まともに中継ができませんでした(笑)
あー事故ったー(笑)
そして2日目のレスキュー。
僕がディスられました。(いろんな意味で)
参加者なんだけどなぁ・・・調整時間が存在しませんでした。
割りと副部長も焦っていてそれどころではなかったので、僕が色々と事故っていました。
まず運営の都合上、本部をパドックにしていましたからね。本大会では考えられませんね。
しかも1回目の競技、ロボットがまともに動かなかった・・・周りの視線が冷たいです・・・
そして2回目は・・・なんとか、まがいなりにも・・・と言った感じでしょうか。缶置いてないけど。
明らかな完成度の低さを露呈した形となりました(笑)
しかも今日の運営の事故が多発、結構副部長に迷惑かけましたね。
因みにSkypeの中継だけは昨日の反省を生かして、外部のEモバイル回線を利用したので結構綺麗・・・
というより、とりあえず滑らかに動くようになりました。昨日カクカクだったもんね・・・
まぁ進歩といえばそれくらいでしたね。事故には変わりない・・・。
それでもなんとか競技会は成立。センサー販売の方も黒字になりました。
因みにセンサーの方ですが、販売自体は今後もトゥルースを中心に行なっていきますので、
注文をしたい場合、または、なにか問題が起きた場合は直接僕に連絡するか、
toaru_sangi_no_rcj☆yahoo.co.jp(☆を@に変更)
までメールを送信して頂けると良い返事が帰ってきますよ。きっと。
という訳で今日はこのへんで。明日からは部活です(笑)
(^・ω・)ノ RadiumProduction in RoboCup Junior
P.s此方のブログに「もう、あとほんのちょっとだげ、◯◯」な自律電脳の記事が掲載されています(笑)
全試合の総得点から総失点を引いた数で順位を付けさせていただいた結果、
高専チームの結果だけが何故か他のチームと符号が違うという結果に。
まぁ、ロボット、動いてなかったもんね(笑)
酷いっていうレベルではありませんでした。
といった具合で、サッカーは不完全燃焼に終わりました。
レスキューでは・・・どうなるでしょうね?まだかなり微妙ですけど・・・。
とりあえずまぁ。試合してくれればいいや。それで満足ですよ、うん。
もうそんなことを考えてしまうような一日でした。
とりあえず明日写真でもアップしようかなと考えています。
生きていればね(笑)
という訳で今日はこのへんで。
ご来店ありがとうございましたー。
(^・ω・)ノ RadiumProduction in RoboCup Junior
高専チームの結果だけが何故か他のチームと符号が違うという結果に。
まぁ、ロボット、動いてなかったもんね(笑)
酷いっていうレベルではありませんでした。
といった具合で、サッカーは不完全燃焼に終わりました。
レスキューでは・・・どうなるでしょうね?まだかなり微妙ですけど・・・。
とりあえずまぁ。試合してくれればいいや。それで満足ですよ、うん。
もうそんなことを考えてしまうような一日でした。
とりあえず明日写真でもアップしようかなと考えています。
生きていればね(笑)
という訳で今日はこのへんで。
ご来店ありがとうございましたー。
(^・ω・)ノ RadiumProduction in RoboCup Junior
2試合目になりました。
1試合目からはだいぶ試合っぽくはなっているんじゃないかな。
結構いい勝負になっているのではないでしょうか。高専生以外は・・・
高専生もっと頑張ろうよ。
(^・ω・)ノ RadiumProduction in RoboCup Junior
1試合目からはだいぶ試合っぽくはなっているんじゃないかな。
結構いい勝負になっているのではないでしょうか。高専生以外は・・・
高専生もっと頑張ろうよ。
(^・ω・)ノ RadiumProduction in RoboCup Junior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
(01/01)
(05/07)
(01/11)
プロフィール
HN:
Luz
性別:
男性
アーカイブ