RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
とりあえず始めたはいいけどこのサマチャレロボットの紹介に何の意味も見いだせない今日この頃です。
というわけで、とっととこのシリーズを終わらせたいとか考えています。
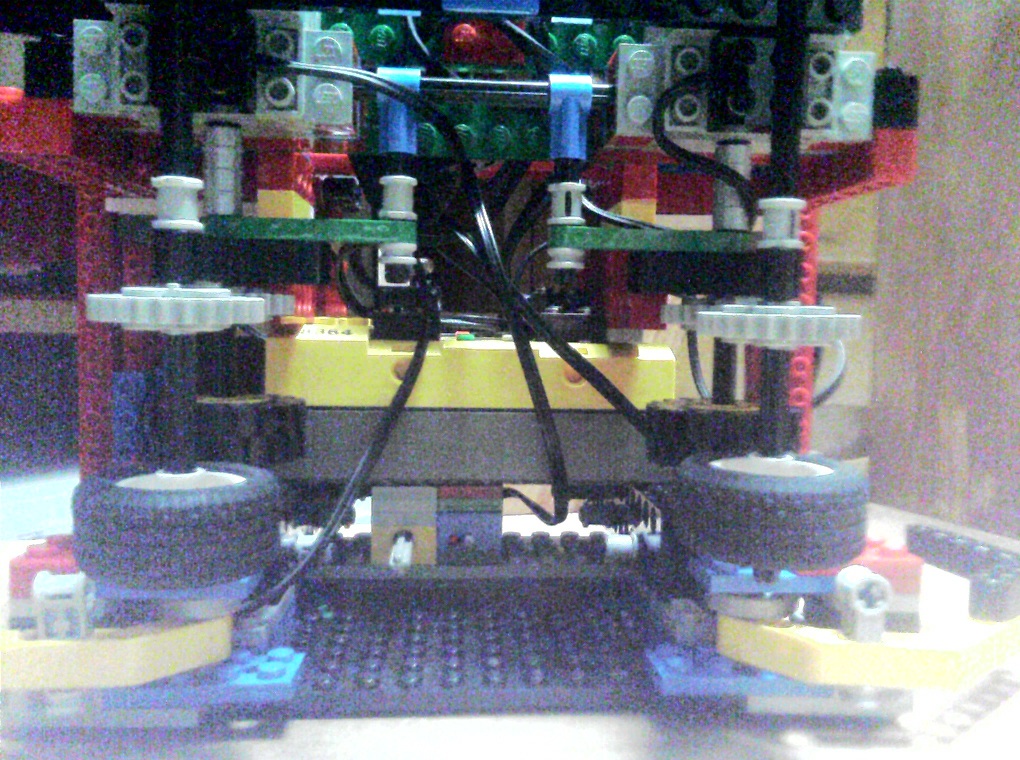
今日紹介するロボットのは一昨年、つまり2009年度に参加した際のロボットです。
どんなものかというと・・・
この年の城塞は中に部屋があり、その部屋の中で赤外線パルスボールがコロコロしてて
それを取ってくる。というものでした。
それでこの年のロボットですが、今まで、タイヤ、アームときたので次は・・・
クローラー。ですよね!?
このロボットの全体像はこちら。
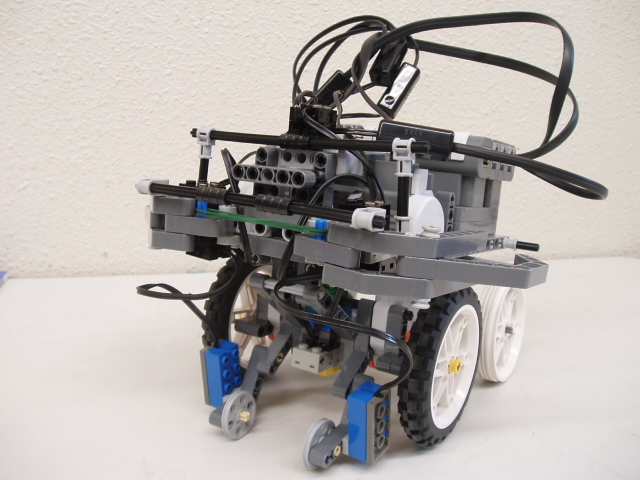
それにしてもまた作りが雑ですね。特にライトセンサーとかとか。
いかにサマーチャレンジに対してのやる気がないかがわかりますね。
基本的にサマーチャレンジのロボットは適当なんです。
あと大径タイヤってあたりが酷さを拡大させているような・・・
高専1年なんだからせめてもうちょっとまともなもん作れよ。自分。
しかもこの年すごかったのが、
本番当日まで調整ナシ。
この年のサマーチャレンジは、フィールドそのものが無茶苦茶大きくて、
それだけで調整する気失せたんですね。
それにこのときは色々と別方面に走ってたからなぁ・・・PICとかPICとかPICとか
もちろん結果はどっかーん。
まぁよくボールとれたよなー。って驚きましたね。確か出口で転んでたけど。
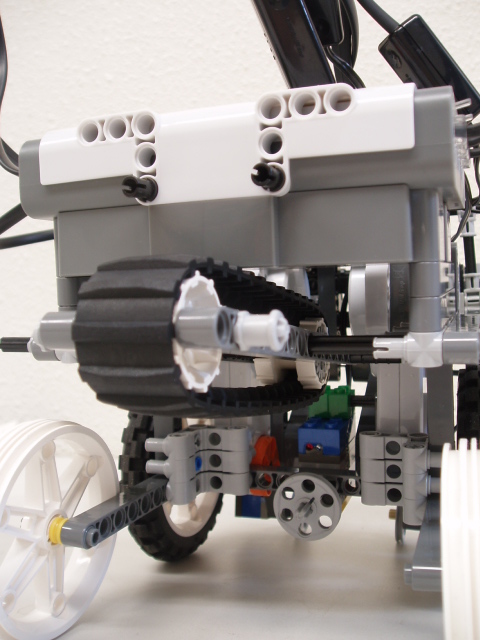
ちなみにクローラーの回転機構はこうなっています。

頭を使わないとこうなるのです。
でわでわーノ
①
②
④
というわけで、とっととこのシリーズを終わらせたいとか考えています。
今日紹介するロボットのは一昨年、つまり2009年度に参加した際のロボットです。
どんなものかというと・・・
この年の城塞は中に部屋があり、その部屋の中で赤外線パルスボールがコロコロしてて
それを取ってくる。というものでした。
それでこの年のロボットですが、今まで、タイヤ、アームときたので次は・・・
クローラー。ですよね!?
このロボットの全体像はこちら。
それにしてもまた作りが雑ですね。特にライトセンサーとかとか。
いかにサマーチャレンジに対してのやる気がないかがわかりますね。
基本的にサマーチャレンジのロボットは適当なんです。
あと大径タイヤってあたりが酷さを拡大させているような・・・
高専1年なんだからせめてもうちょっとまともなもん作れよ。自分。
しかもこの年すごかったのが、
本番当日まで調整ナシ。
この年のサマーチャレンジは、フィールドそのものが無茶苦茶大きくて、
それだけで調整する気失せたんですね。
それにこのときは色々と別方面に走ってたからなぁ・・・PICとかPICとかPICとか
もちろん結果はどっかーん。
まぁよくボールとれたよなー。って驚きましたね。確か出口で転んでたけど。
ちなみにクローラーの回転機構はこうなっています。
頭を使わないとこうなるのです。
でわでわーノ
①
②
④
(^・ω・)ノRadiumProduction in RoboCupJunior
すいません暇だったんです。
これ以上積み上げるのは無謀っていうか、崩れた時の代償がでか過ぎるのでやめにしました。
現在4台。皆さんの更なる挑戦期待です。(すんな)
とりあえず受験休みは今日で終わり、明日からは普通に2連休です。つまりまだ学校は休みですね。
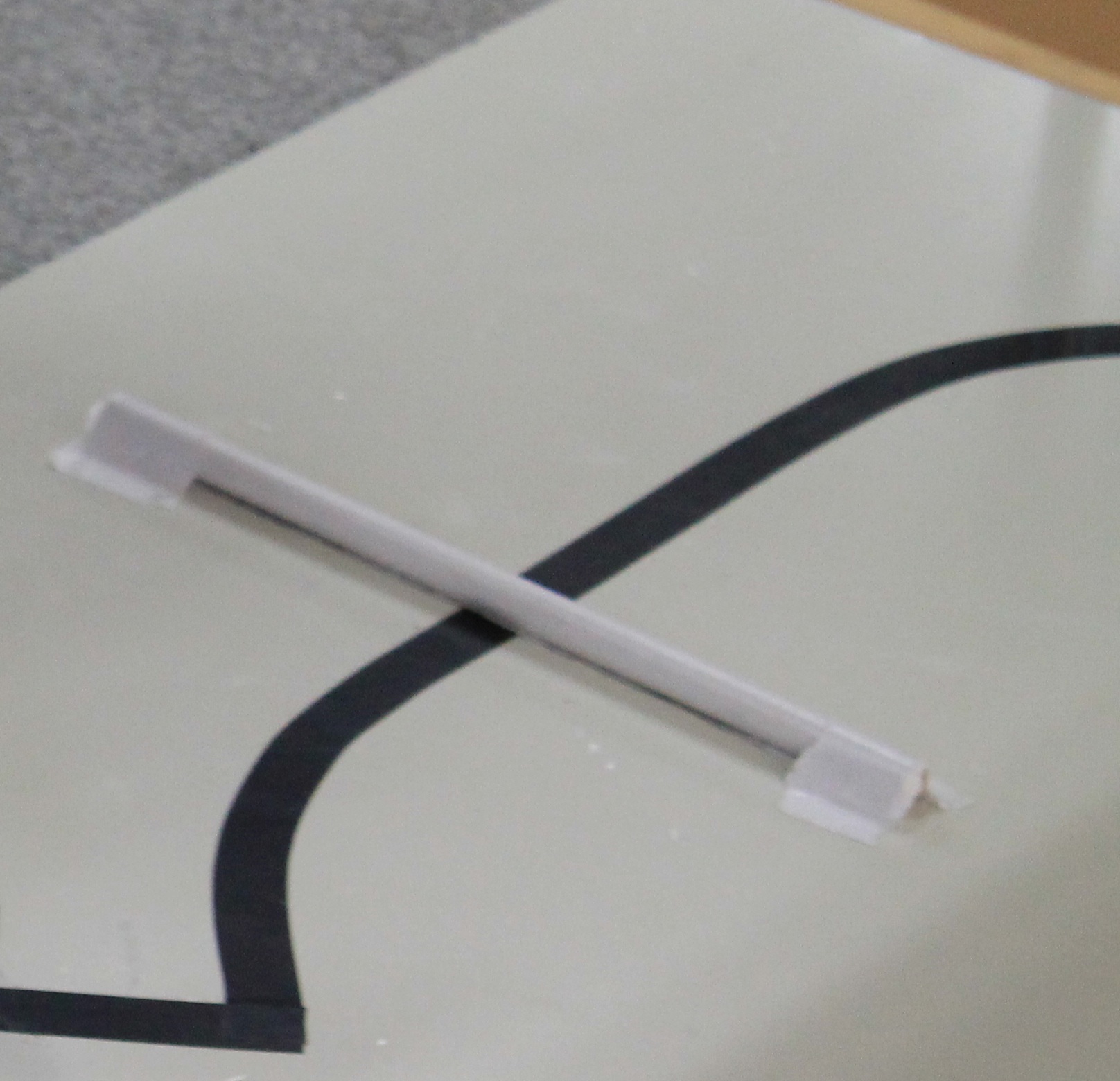
今日は紹介していない最後の障害物、串についてです。
2010年度ルールの串にはこのように記載されています。
wooden sticks less than 3 mm in diameter(e.g. cocktail sticks or kebab skewers).
2010ルールだと、串もバンプと同じ障害物なので、坂に置かれることはありません。
そもそも坂に置くって・・・どうやって?
あと直径3㎜以内で木製であると定義されています。
つまり形状はほぼ円柱で、バンプみたいなのがゴロゴロしているわけではないと言っているような気がします。
例にカクテルスティックとかケバブの棒とありますが、カクテルスティックなのに木製?
よく意味が分かりませんが、木製のカクテルスティックというと、こんな感じの木の棒のことみたいです。

フツーに木の棒ですね。プラスチックのアレを木製にした感じかと思ったのですが。
また、ケバブの棒というのはこんな感じ、
要するに、焼き鳥の串とか爪楊枝とか、そういうのの総称です。
日本委員会も、もうちょっとわかりやすい翻訳をしてくれればいいのに。初めて串のルール見たとき
「ケバブ・・・の・・・棒?」ってなりましたよ。日本語でググってもでないし。
まぁ今更な話ですけど。
そんでもってこれがこんな風にフィールドに巻かれるわけです。
写真で分かるように焼き鳥?の串と爪楊枝がまかれてますね。
当時は2階だけだったけど今はフィールドの至る所に巻かれています。これが色々と動きを狂わすんですね。
最初はほとんどいなかったものの段々対策をするチームが増えてきました。
僕もそろそろ対策を考えないと・・・
去年のロボットはいろいろと失敗したからなぁ。
まぁその話はまた今度致しましょう。
でわ今日はこの辺でノ
(^・ω・)ノRadiumProduction in RoboCupJunior
初めに釘を刺しておきますが、これは100%ネタです。
まったく実用的な動作はできないロボットです。
中3の夏。再びサマーチャレンジの季節がやってきていました。
中3といえば、一番頭がハイになるお年頃。
なにを考えたんでしょうかね。
まぁ間違いなく「勝つ」とか「成功」とかそういう類の文字は頭になかったんでしょうけど。
2008年度。2回目のサマーチャレンジの時のロボットがこれです。
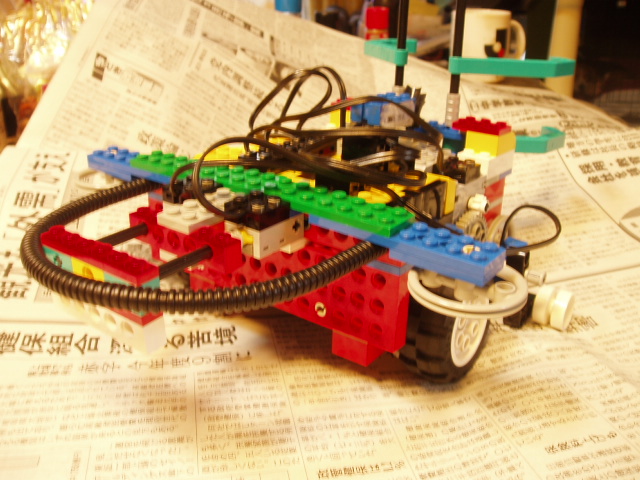
まずバンパーに驚かれましたね。っていうかこんな変態みたことないよ。
この年のサマーチャレンジは城塞の中に台座があって、
その上にある赤外線ボールを落とさずに外まで持っていくという競技でした。
たったそれだけの筈だったのですが、
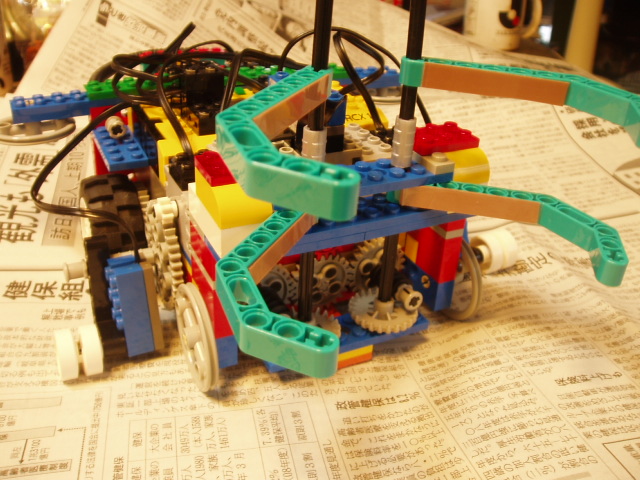
正直この装備はいらなかったと思う。
普通にタイヤで巻き取ればよかったのに・・・
このときは何故か無性に「掴みたい衝動」があったんですね。何故だかはわかりませんが。
それにしてもまた作りが雑ですね。特にライトセンサーとかとか。
いかにサマーチャレンジに対してのやる気がないかがわかりますね。
基本的にサマーチャレンジのロボットは適当なんです。
まぁこのロボットも例のごとく部品が未だにそこら辺に転がってます。
アームの部分とかまんまありますね。
ちなみにサマーチャレンジのロボットがいつも適当な理由は、
レスキューのロボットを作った余りの部品で構成されているからなんですね。
このロボットの成績は・・・どうだったかなぁ。ひとまずボールはつかんでたような気がします。
皆さんはこんなヘタレなロボットは作らないように・・・
でわ今日はこの辺でノ
そもそも機械的なことは苦手だから参考になるようなもん作れないんだよね(笑)
①
③
④
(^・ω・)ノRadiumProduction in RoboCupJunior
まったく実用的な動作はできないロボットです。
中3の夏。再びサマーチャレンジの季節がやってきていました。
中3といえば、一番頭がハイになるお年頃。
なにを考えたんでしょうかね。
まぁ間違いなく「勝つ」とか「成功」とかそういう類の文字は頭になかったんでしょうけど。
2008年度。2回目のサマーチャレンジの時のロボットがこれです。
まずバンパーに驚かれましたね。っていうかこんな変態みたことないよ。
この年のサマーチャレンジは城塞の中に台座があって、
その上にある赤外線ボールを落とさずに外まで持っていくという競技でした。
たったそれだけの筈だったのですが、
正直この装備はいらなかったと思う。
普通にタイヤで巻き取ればよかったのに・・・
このときは何故か無性に「掴みたい衝動」があったんですね。何故だかはわかりませんが。
それにしてもまた作りが雑ですね。特にライトセンサーとかとか。
いかにサマーチャレンジに対してのやる気がないかがわかりますね。
基本的にサマーチャレンジのロボットは適当なんです。
まぁこのロボットも例のごとく部品が未だにそこら辺に転がってます。
アームの部分とかまんまありますね。
ちなみにサマーチャレンジのロボットがいつも適当な理由は、
レスキューのロボットを作った余りの部品で構成されているからなんですね。
このロボットの成績は・・・どうだったかなぁ。ひとまずボールはつかんでたような気がします。
皆さんはこんなヘタレなロボットは作らないように・・・
でわ今日はこの辺でノ
そもそも機械的なことは苦手だから参考になるようなもん作れないんだよね(笑)
①
③
④
(^・ω・)ノRadiumProduction in RoboCupJunior
現在14。大丈夫。これは仕様です。
本当ならI2Cのセンサーとかも使いたかったんですが、応答速度の問題で諦めました。
bpsが合わなかったり、合っても使い道がなかったり。
ハイテックのセンサーもちょっと個人的に使う気になれなかったので使ってません。
去年のロボットもRCXのくせにセンサー数が11個とかありましたが今年はそれ以上です。
本当ならカメラを使う予定もあったんですが、ARMの導入が間に合わなかったのでお預けです。
mindstorm社のカメラ?あんな高くてサンプル見るだけでわかるぐらい制御簡単なものは使いませんよ。
前置きはこのくらいとして、今日の本題に入りましょう。
今日はLEGO用の「通電センサーの作り方」です。
通電センサーといえば、最初に導入されたのは旧レスキューで、
銀被災者の新たなる拷問発見の方法としてでしたね。
確か初めて使用したのはLINK先輩だったかな。今では懐かしい話です。
それ以来ぴょこぴょこと銀用に使われていましたね。
確か2,3年前のノード大会で銀被災者がルールではアルミテープと書いてあるのに通電しない!
という問題があったとかなかったとか。
そんな通電センサーですが原理は簡単で
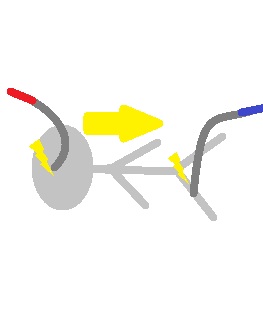
このように2本の導線があって、その線の間に導体(電気の流れるもの)がくると
2本の線が導通(つながって電気が流れる)するというものです。
ロボット側はこの電気の流れを流れているか、流れていないか、の2択で判断させることができます。
電気的には、押されていないときは電気が流れなくて押されると電気が流れるタッチセンサーと同じですね。
このように電気が流れているか、流れていないかの2択で判断するセンサーをデジタルセンサーといいます。
逆にライトセンサーや温度センサーのように、
どれくらいの量流れているかを判断するセンサーをアナログセンサーといいます。
まぁアナログの話は長くなるのでまた今度致します。
というわけで通電センサーはデジタルセンサーです。
この通電センサーですが作り方は至って簡単で。
手順はこれだけです。
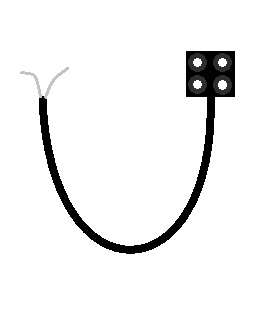
RCXケーブルを切断して被膜を向くだけです。
あ。被膜ってのはコードの金属の線を覆っている黒い部分のことです。
NXTケーブルの場合は切断後、黒い保護膜を取った後で黒と白のケーブルの被膜を剥いてください。
このふたつの線が上の被災者拷問図でいう赤と青の2本のコードになります。
そしてプログラムはタッチセンサーと同じプログラムで行うことができます。
これで。完成!

まぁ簡単なセンサーだったから説明も簡単だったかな。
ぶっちゃけこのブログはこういう自作センサーとか、
そういう系の話がメインになってくるので今後ともよろしくです。
もちろんそれに必要な電子回路的なお話も大量に出てきますよ♪
あ、LEGOやその他ハード、ソフトの話も相変わらず続きますがね(笑)
ちなみに通電センサーは
たまに人間の皮膚でも反応します。
正確には手汗にだけど(笑)塩水って電気をよく通すんですよー。
というわけで今日はこの辺でノ
方向性は広く深く!(絶対どっちつかずになるな・・・orz)
(^・ω・)ノRadiumProduction in RoboCupJunior
本当ならI2Cのセンサーとかも使いたかったんですが、応答速度の問題で諦めました。
bpsが合わなかったり、合っても使い道がなかったり。
ハイテックのセンサーもちょっと個人的に使う気になれなかったので使ってません。
去年のロボットもRCXのくせにセンサー数が11個とかありましたが今年はそれ以上です。
本当ならカメラを使う予定もあったんですが、ARMの導入が間に合わなかったのでお預けです。
mindstorm社のカメラ?あんな高くてサンプル見るだけでわかるぐらい制御簡単なものは使いませんよ。
前置きはこのくらいとして、今日の本題に入りましょう。
今日はLEGO用の「通電センサーの作り方」です。
通電センサーといえば、最初に導入されたのは旧レスキューで、
銀被災者の新たなる拷問発見の方法としてでしたね。
確か初めて使用したのはLINK先輩だったかな。今では懐かしい話です。
それ以来ぴょこぴょこと銀用に使われていましたね。
確か2,3年前のノード大会で銀被災者がルールではアルミテープと書いてあるのに通電しない!
という問題があったとかなかったとか。
そんな通電センサーですが原理は簡単で
このように2本の導線があって、その線の間に導体(電気の流れるもの)がくると
2本の線が導通(つながって電気が流れる)するというものです。
ロボット側はこの電気の流れを流れているか、流れていないか、の2択で判断させることができます。
電気的には、押されていないときは電気が流れなくて押されると電気が流れるタッチセンサーと同じですね。
このように電気が流れているか、流れていないかの2択で判断するセンサーをデジタルセンサーといいます。
逆にライトセンサーや温度センサーのように、
どれくらいの量流れているかを判断するセンサーをアナログセンサーといいます。
まぁアナログの話は長くなるのでまた今度致します。
というわけで通電センサーはデジタルセンサーです。
この通電センサーですが作り方は至って簡単で。
手順はこれだけです。
RCXケーブルを切断して被膜を向くだけです。
あ。被膜ってのはコードの金属の線を覆っている黒い部分のことです。
NXTケーブルの場合は切断後、黒い保護膜を取った後で黒と白のケーブルの被膜を剥いてください。
このふたつの線が上の被災者拷問図でいう赤と青の2本のコードになります。
そしてプログラムはタッチセンサーと同じプログラムで行うことができます。
これで。完成!
まぁ簡単なセンサーだったから説明も簡単だったかな。
ぶっちゃけこのブログはこういう自作センサーとか、
そういう系の話がメインになってくるので今後ともよろしくです。
もちろんそれに必要な電子回路的なお話も大量に出てきますよ♪
あ、LEGOやその他ハード、ソフトの話も相変わらず続きますがね(笑)
ちなみに通電センサーは
たまに人間の皮膚でも反応します。
正確には手汗にだけど(笑)塩水って電気をよく通すんですよー。
というわけで今日はこの辺でノ
方向性は広く深く!(絶対どっちつかずになるな・・・orz)
(^・ω・)ノRadiumProduction in RoboCupJunior
毎年夏の終わりに、RISE主催のサマーチャレンジという競技会がうちの高専で開かれています。
どういう競技かというと、毎年色々変わっては来ているのですが、
おおまかにはロボカップ競技を意識した「宝探し」ということになっています。
ロボットがフィールドを走り回って白い床にある黒と銀の丸(宝)を見つける競技です。
でも最近では、城塞という隠し部屋のようなものができたり、城塞内に宝が置かれるようになったり、
その宝が赤外線ボールになったり、缶になったり、挙句の果てに城塞の中にまた部屋ができたり・・・と
どんどん訳のわからないことになっています。
2010ルールのフィールドはこんな感じ
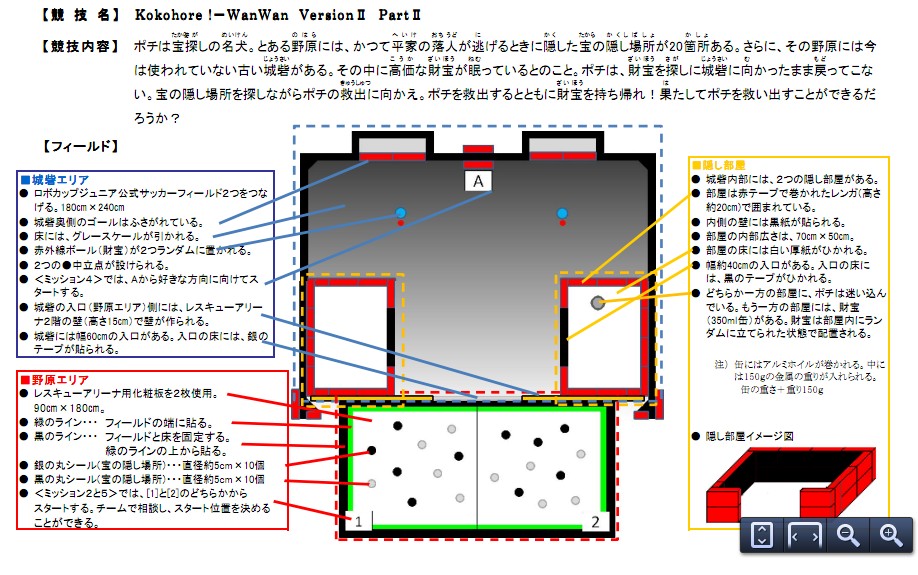
ルールはこのようになっています。
そんなサマーチャレンジに、訳の分からないままに4年ほど参加させていただいています。
毎年毎年成績がどんどん残念な方向にいってしまっているのは秘密ですが。
今日はそんなサマーチャレンジに参加した時のロボットを紹介します。
今日紹介するのは2007年。僕が最初に出場した時のロボットです。
このときが一番成績が良くて3位入賞とかした記憶があります。
すっげーこれしか写真がない(笑)
いかにサマーチャレンジに対してのやる気がないかがわかりますね。
基本的にサマーチャレンジのロボットは適当なんです。
この時は城塞の中に赤外線ボールがあってそれを取り込んで城塞の外に出すというルールでした。
見た目通り、タイヤで取り込んでます。ぐぐーいっと。
そのせいでつける所を失ったタッチセンサーは横に無理矢理挿入されています。
4年前・・・というと中2か?もっとまともなの作れただろうに・・・手抜きですね。
この時の大会ではこんな馬鹿でかいロボットは他にいなかったと思います。
しかもこんなところにモーター2つもつけるバカは・・・
真ん中にボールを見つけるライトセンサー。そしてボールを取り込んだことを確認するタッチセンサーがあり、
あと城塞の外の宝を見つけるために、ロボットの左右にライトセンサーがひとつずつついてます。
ちょっと写真では確認できませんが。
このころはまだNXTが普及してなかったのでみんなRCXでしたね。自作もいなかったし。
でも未だにこのロボットが競技で勝てた理由がよくワカリマセン。こんな適当なのに・・・
しかもこのロボット、未だに部品が部屋のいたるところに転がってたりします。さっさと分解シロ。
というわけで今日はこの辺で。
サマーチャレンジのロボット紹介はまたやるかもわかりません。
まぁ記事タイに①って書いちゃったからやるんだろうな・・・
②
③
④
でわでわー。
(^・ω・)ノRadiumProduction in RoboCupJunior
どういう競技かというと、毎年色々変わっては来ているのですが、
おおまかにはロボカップ競技を意識した「宝探し」ということになっています。
ロボットがフィールドを走り回って白い床にある黒と銀の丸(宝)を見つける競技です。
でも最近では、城塞という隠し部屋のようなものができたり、城塞内に宝が置かれるようになったり、
その宝が赤外線ボールになったり、缶になったり、挙句の果てに城塞の中にまた部屋ができたり・・・と
どんどん訳のわからないことになっています。
2010ルールのフィールドはこんな感じ
ルールはこのようになっています。
そんなサマーチャレンジに、訳の分からないままに4年ほど参加させていただいています。
毎年毎年成績がどんどん残念な方向にいってしまっているのは秘密ですが。
今日はそんなサマーチャレンジに参加した時のロボットを紹介します。
今日紹介するのは2007年。僕が最初に出場した時のロボットです。
このときが一番成績が良くて3位入賞とかした記憶があります。
すっげーこれしか写真がない(笑)
いかにサマーチャレンジに対してのやる気がないかがわかりますね。
基本的にサマーチャレンジのロボットは適当なんです。
この時は城塞の中に赤外線ボールがあってそれを取り込んで城塞の外に出すというルールでした。
見た目通り、タイヤで取り込んでます。ぐぐーいっと。
そのせいでつける所を失ったタッチセンサーは横に無理矢理挿入されています。
4年前・・・というと中2か?もっとまともなの作れただろうに・・・手抜きですね。
この時の大会ではこんな馬鹿でかいロボットは他にいなかったと思います。
しかもこんなところにモーター2つもつけるバカは・・・
真ん中にボールを見つけるライトセンサー。そしてボールを取り込んだことを確認するタッチセンサーがあり、
あと城塞の外の宝を見つけるために、ロボットの左右にライトセンサーがひとつずつついてます。
ちょっと写真では確認できませんが。
このころはまだNXTが普及してなかったのでみんなRCXでしたね。自作もいなかったし。
でも未だにこのロボットが競技で勝てた理由がよくワカリマセン。こんな適当なのに・・・
しかもこのロボット、未だに部品が部屋のいたるところに転がってたりします。さっさと分解シロ。
というわけで今日はこの辺で。
サマーチャレンジのロボット紹介はまたやるかもわかりません。
まぁ記事タイに①って書いちゃったからやるんだろうな・・・
②
③
④
でわでわー。
(^・ω・)ノRadiumProduction in RoboCupJunior
期末試験も、何とか無事に終わり、入試の影響で束の間の6連休です。
もちろん入試中は登校禁止なので部活なんてできません。
まぁロボットだけならうちにあるのですが・・・崩壊中(笑)
今日はこの前の続きで2009年度に追加された新しい障害物の紹介です。
その名もバンプ。

スピードバンプとも呼ばれます。
高速とかで速度制限をするために、路面にあるでっぱりのことですね

こんな感じで。
でも、ロボカップの競技においては

こういう白く塗られた直径10㎜の丸棒です。
もはやバンプというよりコレみたい。

これがこんな風にフィールドに貼り付けられるわけです。
上の写真は今のルールにある、丸棒ですが、
実は登場して直ぐの2009年の時点では、10の丸棒を半円状にカットしたもので、
高さ5㎜のかまぼこでした。
なぜ、たった一年で倍の大きさになったかというと、当時の大会で初めてバンプが現れたはいいのですが、
特に対策をしなくても普通に乗り越えられるという事態が発生。課題として成り立ってなかったんですね。
それでおおきくなったのかなーなんて。いや、もしかしたらこうなることを想定して・・・
まぁそれでも多くのロボットが特に考えずに越えられる課題であることに変わりはないんですけどね。
でも底が擦るので低重心のロボットは作りにくくなったかも。低重心は得意技だっただけに残念です。
そんでもってこれがアリーナに縦横無尽に置かれると。ひとつならいいんですが、複数あると大変ですね。
やっぱりホバークラフトかヘリコプターで参戦しなくてはならない日も近いのか・・・?
今日はこの辺で終わりにしときます。
(^・ω・)ノRadiumProduction in RoboCupJunior
もちろん入試中は登校禁止なので部活なんてできません。
まぁロボットだけならうちにあるのですが・・・崩壊中(笑)
今日はこの前の続きで2009年度に追加された新しい障害物の紹介です。
その名もバンプ。
スピードバンプとも呼ばれます。
高速とかで速度制限をするために、路面にあるでっぱりのことですね
こんな感じで。
でも、ロボカップの競技においては
こういう白く塗られた直径10㎜の丸棒です。
もはやバンプというよりコレみたい。
これがこんな風にフィールドに貼り付けられるわけです。
上の写真は今のルールにある、丸棒ですが、
実は登場して直ぐの2009年の時点では、10の丸棒を半円状にカットしたもので、
高さ5㎜のかまぼこでした。
なぜ、たった一年で倍の大きさになったかというと、当時の大会で初めてバンプが現れたはいいのですが、
特に対策をしなくても普通に乗り越えられるという事態が発生。課題として成り立ってなかったんですね。
それでおおきくなったのかなーなんて。いや、もしかしたらこうなることを想定して・・・
まぁそれでも多くのロボットが特に考えずに越えられる課題であることに変わりはないんですけどね。
でも底が擦るので低重心のロボットは作りにくくなったかも。低重心は得意技だっただけに残念です。
そんでもってこれがアリーナに縦横無尽に置かれると。ひとつならいいんですが、複数あると大変ですね。
やっぱりホバークラフトかヘリコプターで参戦しなくてはならない日も近いのか・・・?
今日はこの辺で終わりにしときます。
(^・ω・)ノRadiumProduction in RoboCupJunior
明日も期末試験なので、秋葉に遊びにいってきました。
そしたら高専のロボカップジュニア部OBの方と遭遇してしまいました。
本当の意味で秋葉原に常日頃いる人なので会うのは別に普通なことなんですが・・・
やっぱり高専生の秋葉率は異常だなぁ。
それで、なんで今日秋葉に行ったかというと、
なんでかわからないんですが、知らないうちに基盤が焼けていたみたいで、
予備の部品の調達に行ったからです。
ほんとに焼けてたのが気が付かなくて・・・ほかのとこ生きてて普通に使ってたから(笑)
それで今日は部品かって、基盤直して、終わりました。
当の基盤ですが、なぜかいっつも自分が設計すると大変なことになるんですね。
イヤ、最初は普通にゆとりのある基盤だったんですよ。それがあれこれ後付してるうちに。。。
裏だけでこんなことに。
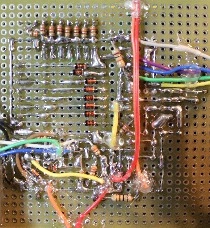
これでも気持ち悪くなったからって2回ぐらい作り直してるんだけどなぁ。どうしてこうなった。
まぁこの基盤はましな方さ・・・。実際もっとひどいのなんていくらでもありますね(無駄に自慢げ)
ちなみに蜘蛛の巣みたいなのはホットボンドです。半乾きなのでテカテカしてます。
あ。そうそう。今日秋葉でそのOBの先輩によさげな方位センサーを紹介して頂きました。

こちらの商品ですが分解能0.1°の精度1.0°と非常に優れたI2Cのセンサーです。
この精度なら決め打ちも簡単・・・?
磁場に強いか弱いかが気になりますね。どの程度食らうのか・・・
まぁ磁気センサーである以上多少食らうのは仕方がないことなんですがね。
まぁ今日はこの辺で。
(^・ω・)ノRadiumProduction in RoboCupJunior
そしたら高専のロボカップジュニア部OBの方と遭遇してしまいました。
本当の意味で秋葉原に常日頃いる人なので会うのは別に普通なことなんですが・・・
やっぱり高専生の秋葉率は異常だなぁ。
それで、なんで今日秋葉に行ったかというと、
なんでかわからないんですが、知らないうちに基盤が焼けていたみたいで、
予備の部品の調達に行ったからです。
ほんとに焼けてたのが気が付かなくて・・・ほかのとこ生きてて普通に使ってたから(笑)
それで今日は部品かって、基盤直して、終わりました。
当の基盤ですが、なぜかいっつも自分が設計すると大変なことになるんですね。
イヤ、最初は普通にゆとりのある基盤だったんですよ。それがあれこれ後付してるうちに。。。
裏だけでこんなことに。
これでも気持ち悪くなったからって2回ぐらい作り直してるんだけどなぁ。どうしてこうなった。
まぁこの基盤はましな方さ・・・。実際もっとひどいのなんていくらでもありますね(無駄に自慢げ)
ちなみに蜘蛛の巣みたいなのはホットボンドです。半乾きなのでテカテカしてます。
あ。そうそう。今日秋葉でそのOBの先輩によさげな方位センサーを紹介して頂きました。
こちらの商品ですが分解能0.1°の精度1.0°と非常に優れたI2Cのセンサーです。
この精度なら決め打ちも簡単・・・?
磁場に強いか弱いかが気になりますね。どの程度食らうのか・・・
まぁ磁気センサーである以上多少食らうのは仕方がないことなんですがね。
まぁ今日はこの辺で。
(^・ω・)ノRadiumProduction in RoboCupJunior
電池を変えたらちょっと早くなりましたがまだやっぱりのろのろですね。
今年は速度で攻めようという予定があったんですが、 どうやら方針転換に迫られているようです。
ロボットもできてないし・・・
というわけで今日は現実逃避(期末的な意味で)も兼ねて、昔のロボットの紹介です。
といってもこの機体・・・何回も紹介してますよね。これからも何回も紹介しますよ(笑)
まぁ他の子達もいるので他の子達の紹介も今度致します。
今までのRadiumは「ハウルの動く城」だの「レスキューロボットの皮を被った戦車」だのと
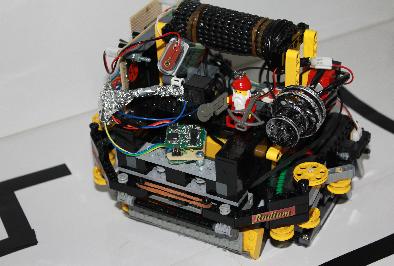
内外からよく「ごっつい」と言われるような外見のロボットの作っていますが、
実は個人的に、スタイルとしてはシンプル、そして確実、
そして「静か」を貫いてきました。
特に音に関してはよく周りの人に驚かれましたね
「無音だ!」とか叫ばれていた時期もありましたが、無音ではないんですよー。
それでも、自作機とかNXT、学校のRCXとかに比べるとやっぱり静かですね。たまに動かすと驚きますよ。
あとエボルタなんで地味に速いです。特に電池変えた後とかはおかしいです。
でも電池一年以上変えてないなー。今変えたらやっぱりむっちゃ速くなんだろうなー。
今のところ、作っているNXTのロボットは、このロボットに匹敵するライントレースは未だできないままです。
いったいこんなのどうやって作ったのか・・・
プログラムのソースがUSBの焼失←によって消失したので永遠の謎になってしまいました。
なんで焼失したかって?PICでUSBメモリの読み出した時に短絡して(うわなにするやめry
というわけで今のところ、このロボットを超えるライントレースをすることが当面の目的です。
達成できる気配すらありませんが(笑)
ちなみにライントレースは補助基盤がなくてもできるようになってます。
その補助基盤の写真がこれ。ずいぶん昔に作ったのでいろいろと残念ですが・・・
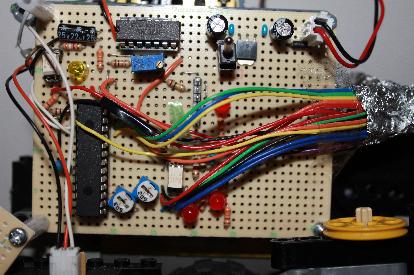
簡単に説明すると左下のゲジゲジがPICというマイクロコントローラーです。16F873Aって書いてありました。
結構古い型使ってたんですね。てっきり24Fだと思ってた。
その隣のネジっぽいやつが可変抵抗。これは緑センサー用のLEDの明るさの調整用です。
確かフルカラーだったはず。
それでその隣にある白いのとPICの上にある白いのがフォトカプラという素子です。
これは(説明略)というもので、これをPICで制御してRCXと通信してました。
上のフォトカプラの近くの黄LEDが恐らく通信のデバッカです
LEDの可変抵抗の近くの赤LEDは緑の検知を示すLEDです。
これはセンサーの値を直接デジ値で出してるのではなく、PICから出力しています
ちなみにその右にある上下2つの赤LEDは水銀の検知デバッカです。
上のLEDの上の部分が電源部分でその左にあるICとかその辺が緑センサーのデジタル変換部です。
でも結果的に緑センサーがアナログに変更されたので使ってません。ただ電気食ってるだけです。
残りのセンサーはPICに直接接続されています。コードの束があるのはそのためです。
これで一通り説明かな。
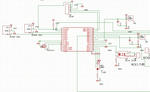
最後に回路図です。最後の変更からフィードバックしてない気がするので間違ってるかも。
ちなみに緑センサーのデジタル部分はないです。

今思えばシンガポールで24Fのことふつうに「にーよんえふ」って言ってたけどなんで通じたんだろう。
(^・ω・)ノRadiumProduction in RoboCupJunior
今年は速度で攻めようという予定があったんですが、 どうやら方針転換に迫られているようです。
ロボットもできてないし・・・
というわけで今日は現実逃避(期末的な意味で)も兼ねて、昔のロボットの紹介です。
といってもこの機体・・・何回も紹介してますよね。これからも何回も紹介しますよ(笑)
まぁ他の子達もいるので他の子達の紹介も今度致します。
今までのRadiumは「ハウルの動く城」だの「レスキューロボットの皮を被った戦車」だのと
内外からよく「ごっつい」と言われるような外見のロボットの作っていますが、
実は個人的に、スタイルとしてはシンプル、そして確実、
そして「静か」を貫いてきました。
特に音に関してはよく周りの人に驚かれましたね
「無音だ!」とか叫ばれていた時期もありましたが、無音ではないんですよー。
それでも、自作機とかNXT、学校のRCXとかに比べるとやっぱり静かですね。たまに動かすと驚きますよ。
あとエボルタなんで地味に速いです。特に電池変えた後とかはおかしいです。
でも電池一年以上変えてないなー。今変えたらやっぱりむっちゃ速くなんだろうなー。
今のところ、作っているNXTのロボットは、このロボットに匹敵するライントレースは未だできないままです。
いったいこんなのどうやって作ったのか・・・
プログラムのソースがUSBの焼失←によって消失したので永遠の謎になってしまいました。
なんで焼失したかって?PICでUSBメモリの読み出した時に短絡して(うわなにするやめry
というわけで今のところ、このロボットを超えるライントレースをすることが当面の目的です。
達成できる気配すらありませんが(笑)
ちなみにライントレースは補助基盤がなくてもできるようになってます。
その補助基盤の写真がこれ。ずいぶん昔に作ったのでいろいろと残念ですが・・・
簡単に説明すると左下のゲジゲジがPICというマイクロコントローラーです。16F873Aって書いてありました。
結構古い型使ってたんですね。てっきり24Fだと思ってた。
その隣のネジっぽいやつが可変抵抗。これは緑センサー用のLEDの明るさの調整用です。
確かフルカラーだったはず。
それでその隣にある白いのとPICの上にある白いのがフォトカプラという素子です。
これは(説明略)というもので、これをPICで制御してRCXと通信してました。
上のフォトカプラの近くの黄LEDが恐らく通信のデバッカです
LEDの可変抵抗の近くの赤LEDは緑の検知を示すLEDです。
これはセンサーの値を直接デジ値で出してるのではなく、PICから出力しています
ちなみにその右にある上下2つの赤LEDは水銀の検知デバッカです。
上のLEDの上の部分が電源部分でその左にあるICとかその辺が緑センサーのデジタル変換部です。
でも結果的に緑センサーがアナログに変更されたので使ってません。ただ電気食ってるだけです。
残りのセンサーはPICに直接接続されています。コードの束があるのはそのためです。
これで一通り説明かな。
最後に回路図です。最後の変更からフィードバックしてない気がするので間違ってるかも。
ちなみに緑センサーのデジタル部分はないです。
今思えばシンガポールで24Fのことふつうに「にーよんえふ」って言ってたけどなんで通じたんだろう。
(^・ω・)ノRadiumProduction in RoboCupJunior
英語版ではObstacleと表記されているものですね。
関東では普通に「障害物」と呼んでます。
他の二つは「バンプ」。「串」と呼んで区別しています。
障害物なのでルール上は坂と通路以外ならアリーナのどこにでも置いていいことになってますね。
極端な話、部屋の入り口なんかに置かれていたらどうすることもできなくなります。
ルールで規制しない辺りに、なにか「嫌らしさ」を感じさせますね
まぁそんなところに置いたら競技にならないので、絶対にこんなところには置かれませんが。
ちなみに形とかも規制されていないので地方によってバラバラです。
因みに東東京、神奈川西東京だと(もしかしたら関東も)、うちの高専産の石膏の固まりになります。
画面右下のこれですね。計4種類くらいあります。
そろそろポロポロき始めているので新しいのになるかもしれませんね。
近くで見るとひび割れとかが
昔、僕が行ったジャパンオープンにもうちの高専産の障害物がいた気もします。
日本にいる限り、どっかでお世話になることは必須かもしれませんね。
因みに世界大会だとペットボトルに「砂」というものになるようです。アリーナの床が心配です。
現にうちのフィールドも障害物を置くと曲が・・・撓ります。
大体こういうのが1階のライン上と2階に置かれてたりします。
このへんだとブロック大会あたりから2階障害物が登場するでしょうか。とてつもなく邪魔です(泣)
特に缶と見間違えるので、基本的にあると(時間的な意味で)終わります。
上位大会にあがる為にはこの対策も重要なのかもしれませんね。どう考えても時間勝負だもん。今の日本。
まぁノロノロNXTを使っている以上、そんなこと気にする以前に負けてしまうでしょうが・・・
もうRCXででようかな・・・><。
(^・ω・)ノRadiumProduction in RoboCupJunior
関東では普通に「障害物」と呼んでます。
他の二つは「バンプ」。「串」と呼んで区別しています。
障害物なのでルール上は坂と通路以外ならアリーナのどこにでも置いていいことになってますね。
極端な話、部屋の入り口なんかに置かれていたらどうすることもできなくなります。
ルールで規制しない辺りに、なにか「嫌らしさ」を感じさせますね
まぁそんなところに置いたら競技にならないので、絶対にこんなところには置かれませんが。
ちなみに形とかも規制されていないので地方によってバラバラです。
因みに東東京、神奈川西東京だと(もしかしたら関東も)、うちの高専産の石膏の固まりになります。
画面右下のこれですね。計4種類くらいあります。
そろそろポロポロき始めているので新しいのになるかもしれませんね。
近くで見るとひび割れとかが
昔、僕が行ったジャパンオープンにもうちの高専産の障害物がいた気もします。
日本にいる限り、どっかでお世話になることは必須かもしれませんね。
因みに世界大会だとペットボトルに「砂」というものになるようです。アリーナの床が心配です。
現にうちのフィールドも障害物を置くと曲が・・・撓ります。
大体こういうのが1階のライン上と2階に置かれてたりします。
このへんだとブロック大会あたりから2階障害物が登場するでしょうか。とてつもなく邪魔です(泣)
特に缶と見間違えるので、基本的にあると(時間的な意味で)終わります。
上位大会にあがる為にはこの対策も重要なのかもしれませんね。どう考えても時間勝負だもん。今の日本。
まぁノロノロNXTを使っている以上、そんなこと気にする以前に負けてしまうでしょうが・・・
もうRCXででようかな・・・><。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日は杉並区立科学館でロボット杉並21の大会があったようです。
ヒマ(ヒマと書いて試験前と読む、その逆もまたry)だったので行く予定だったんですけど、
まさかのインフルで謹慎くらいまして、行けませんでした。
ちなみに体自体は元気なのでいつもと何も変わらないニート生活をしています。
明日から学校にいってもいいんだとか。よかったよかった。
すぎなみの大会どうなったんだろう・・・ルールがとっぴでたものだから面白そうだったんだけど・・・
まぁいいや。とりあえずこんな感じでスイマセンm(_ _)m
(^・ω・)ノRadiumProduction in RoboCupJunior
ヒマ(ヒマと書いて試験前と読む、その逆もまたry)だったので行く予定だったんですけど、
まさかのインフルで謹慎くらいまして、行けませんでした。
ちなみに体自体は元気なのでいつもと何も変わらないニート生活をしています。
明日から学校にいってもいいんだとか。よかったよかった。
すぎなみの大会どうなったんだろう・・・ルールがとっぴでたものだから面白そうだったんだけど・・・
まぁいいや。とりあえずこんな感じでスイマセンm(_ _)m
(^・ω・)ノRadiumProduction in RoboCupJunior
かーなーり。明後日の方向にすっ飛んでますね。
なんでこうなったんだろう。。。まぁいいや
今日の記事はそんな昔に作った流れを復活させるべく、ある課題について、書くことにします。
その課題とは
それに対抗する為にガトリング回し始めたんだっけ・・・
まぁ結局公式大会での第3勢力の登場はなかったと思いますが(笑)
そのもっと昔は坂の角度が60度くらいあったりと無茶苦茶カオスでしたね(あくまで噂です)
さらに昔は坂すらなかったけど・・・
とりあえず、現在のレスキューは人口も増えてきたこともあり、
そういう無法地帯ではなくなってきてしまっているんですね(ある意味つまらん)
でも、障害物に関してだけなら、今はかなり単純になったのでやりやすい・・・かな?
ちなみにこれは2010のルールです。2011になるとこの辺りが真っ赤になりますが
地区大会は2010ルールなので2011ルールはまた今度ということで・・・
と。言うわけで一口に障害物といっても種類は3種類あるわけです。
全部全く違った要素を持っているので、攻略方法も3つそれぞれバラバラになりますね。
今度の記事では今、一般に「障害物」といわれているブロックについて記述しようかなと考えています。
それでは今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
なんでこうなったんだろう。。。まぁいいや
今日の記事はそんな昔に作った流れを復活させるべく、ある課題について、書くことにします。
その課題とは
1.5. Debris:
1.5.1. Debris may be located anywhere in the arena (but NOT in hallways or on the ramp).
Debris may take the form of obstacles to be avoided, speed bumps that should be driven
over, or smaller objects that could be driven over or pushed aside.
1.5.2. Debris may consist of bricks, blocks, weights, speed bumps (made from 10 mm
plastic pipe or wooden dowel painted white), or wooden sticks less than 3 mm in diameter
(e.g. cocktail sticks or kebab skewers)
これです。
これは何かというと、今の日本のレスキューで、所謂「障害物」といわれているものです。
これによると、障害物は坂、通路以外のアリーナ内ならどこにでも置かれる可能性がある。
形は、よけて通る比較的大きいもの、スピードバンプ、押しのけて通れる比較的小さいものの3種類がある。
それで、大きいものは瓦とか重いブロックみたいなもの、
スピードバンプは直径10ミリのプラスチックパイプか木の棒を白く塗ったもの、
または直径3ミリ以内のカクテルスティックやケバブの棒など
みたいな感じになるような気がします。(今文章呼んでその場で訳したので定かではありません)
今のところ定義されているのはこれだけです。昔みたいに多くないです。
簡潔にすると
・障害物はブロックとバンプとちーさい串の3種類
・坂や通路には置かれない
これだけです。
結構未だに勘違いしている人が多いのですが
近くの壁から30センチ以上離す→削除
直線に置かれる→とうの昔に削除
障害物の前後の直線のラインは30cm以上→上の2つがごっちゃに・・・でもそんなルールもあった気がする
2階にはない→そんなこと誰も言ってないですよ
串は2階だけ→2009から1階にもあります
ブロックは真四角→形の記載はないですよ。(瓦に至っては見た事がない)
壁と垂直なラインにのみ置かれる→ギャップと勘違いしてませんか?
ライン上以外にはない→ラインとか関係なくあります
ちっちゃいブロックとかも置いてある→確かに怪しい表記だけどそれが明記されていたのは2009のみ
ラインから10センチ以上はなせば何をおいてもよい→あー5年以上前のルールにそんなのあったなぁ
ラインから10cm以上離れてたら何置いてもよかった頃は
恐竜とか、ロボット、被災者に次いでロボットを攻撃してくる第3勢力とかいろんなのがいたような気がします。
これです。
これは何かというと、今の日本のレスキューで、所謂「障害物」といわれているものです。
これによると、障害物は坂、通路以外のアリーナ内ならどこにでも置かれる可能性がある。
形は、よけて通る比較的大きいもの、スピードバンプ、押しのけて通れる比較的小さいものの3種類がある。
それで、大きいものは瓦とか重いブロックみたいなもの、
スピードバンプは直径10ミリのプラスチックパイプか木の棒を白く塗ったもの、
または直径3ミリ以内のカクテルスティックやケバブの棒など
みたいな感じになるような気がします。(今文章呼んでその場で訳したので定かではありません)
今のところ定義されているのはこれだけです。昔みたいに多くないです。
簡潔にすると
・障害物はブロックとバンプとちーさい串の3種類
・坂や通路には置かれない
これだけです。
結構未だに勘違いしている人が多いのですが
近くの壁から30センチ以上離す→削除
直線に置かれる→とうの昔に削除
障害物の前後の直線のラインは30cm以上→上の2つがごっちゃに・・・でもそんなルールもあった気がする
2階にはない→そんなこと誰も言ってないですよ
串は2階だけ→2009から1階にもあります
ブロックは真四角→形の記載はないですよ。(瓦に至っては見た事がない)
壁と垂直なラインにのみ置かれる→ギャップと勘違いしてませんか?
ライン上以外にはない→ラインとか関係なくあります
ちっちゃいブロックとかも置いてある→確かに怪しい表記だけどそれが明記されていたのは2009のみ
ラインから10センチ以上はなせば何をおいてもよい→あー5年以上前のルールにそんなのあったなぁ
ラインから10cm以上離れてたら何置いてもよかった頃は
恐竜とか、ロボット、被災者に次いでロボットを攻撃してくる第3勢力とかいろんなのがいたような気がします。
それに対抗する為にガトリング回し始めたんだっけ・・・
まぁ結局公式大会での第3勢力の登場はなかったと思いますが(笑)
そのもっと昔は坂の角度が60度くらいあったりと無茶苦茶カオスでしたね(あくまで噂です)
さらに昔は坂すらなかったけど・・・
とりあえず、現在のレスキューは人口も増えてきたこともあり、
そういう無法地帯ではなくなってきてしまっているんですね(ある意味つまらん)
でも、障害物に関してだけなら、今はかなり単純になったのでやりやすい・・・かな?
ちなみにこれは2010のルールです。2011になるとこの辺りが真っ赤になりますが
地区大会は2010ルールなので2011ルールはまた今度ということで・・・
と。言うわけで一口に障害物といっても種類は3種類あるわけです。
全部全く違った要素を持っているので、攻略方法も3つそれぞれバラバラになりますね。
今度の記事では今、一般に「障害物」といわれているブロックについて記述しようかなと考えています。
それでは今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
(01/01)
(05/07)
(01/11)
プロフィール
HN:
Luz
性別:
男性
アーカイブ