RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
英語版ではObstacleと表記されているものですね。
関東では普通に「障害物」と呼んでます。
他の二つは「バンプ」。「串」と呼んで区別しています。
障害物なのでルール上は坂と通路以外ならアリーナのどこにでも置いていいことになってますね。
極端な話、部屋の入り口なんかに置かれていたらどうすることもできなくなります。
ルールで規制しない辺りに、なにか「嫌らしさ」を感じさせますね
まぁそんなところに置いたら競技にならないので、絶対にこんなところには置かれませんが。
ちなみに形とかも規制されていないので地方によってバラバラです。
因みに東東京、神奈川西東京だと(もしかしたら関東も)、うちの高専産の石膏の固まりになります。
画面右下のこれですね。計4種類くらいあります。
そろそろポロポロき始めているので新しいのになるかもしれませんね。
近くで見るとひび割れとかが
昔、僕が行ったジャパンオープンにもうちの高専産の障害物がいた気もします。
日本にいる限り、どっかでお世話になることは必須かもしれませんね。
因みに世界大会だとペットボトルに「砂」というものになるようです。アリーナの床が心配です。
現にうちのフィールドも障害物を置くと曲が・・・撓ります。
大体こういうのが1階のライン上と2階に置かれてたりします。
このへんだとブロック大会あたりから2階障害物が登場するでしょうか。とてつもなく邪魔です(泣)
特に缶と見間違えるので、基本的にあると(時間的な意味で)終わります。
上位大会にあがる為にはこの対策も重要なのかもしれませんね。どう考えても時間勝負だもん。今の日本。
まぁノロノロNXTを使っている以上、そんなこと気にする以前に負けてしまうでしょうが・・・
もうRCXででようかな・・・><。
(^・ω・)ノRadiumProduction in RoboCupJunior
関東では普通に「障害物」と呼んでます。
他の二つは「バンプ」。「串」と呼んで区別しています。
障害物なのでルール上は坂と通路以外ならアリーナのどこにでも置いていいことになってますね。
極端な話、部屋の入り口なんかに置かれていたらどうすることもできなくなります。
ルールで規制しない辺りに、なにか「嫌らしさ」を感じさせますね
まぁそんなところに置いたら競技にならないので、絶対にこんなところには置かれませんが。
ちなみに形とかも規制されていないので地方によってバラバラです。
因みに東東京、神奈川西東京だと(もしかしたら関東も)、うちの高専産の石膏の固まりになります。
画面右下のこれですね。計4種類くらいあります。
そろそろポロポロき始めているので新しいのになるかもしれませんね。
近くで見るとひび割れとかが
昔、僕が行ったジャパンオープンにもうちの高専産の障害物がいた気もします。
日本にいる限り、どっかでお世話になることは必須かもしれませんね。
因みに世界大会だとペットボトルに「砂」というものになるようです。アリーナの床が心配です。
現にうちのフィールドも障害物を置くと曲が・・・撓ります。
大体こういうのが1階のライン上と2階に置かれてたりします。
このへんだとブロック大会あたりから2階障害物が登場するでしょうか。とてつもなく邪魔です(泣)
特に缶と見間違えるので、基本的にあると(時間的な意味で)終わります。
上位大会にあがる為にはこの対策も重要なのかもしれませんね。どう考えても時間勝負だもん。今の日本。
まぁノロノロNXTを使っている以上、そんなこと気にする以前に負けてしまうでしょうが・・・
もうRCXででようかな・・・><。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日は杉並区立科学館でロボット杉並21の大会があったようです。
ヒマ(ヒマと書いて試験前と読む、その逆もまたry)だったので行く予定だったんですけど、
まさかのインフルで謹慎くらいまして、行けませんでした。
ちなみに体自体は元気なのでいつもと何も変わらないニート生活をしています。
明日から学校にいってもいいんだとか。よかったよかった。
すぎなみの大会どうなったんだろう・・・ルールがとっぴでたものだから面白そうだったんだけど・・・
まぁいいや。とりあえずこんな感じでスイマセンm(_ _)m
(^・ω・)ノRadiumProduction in RoboCupJunior
ヒマ(ヒマと書いて試験前と読む、その逆もまたry)だったので行く予定だったんですけど、
まさかのインフルで謹慎くらいまして、行けませんでした。
ちなみに体自体は元気なのでいつもと何も変わらないニート生活をしています。
明日から学校にいってもいいんだとか。よかったよかった。
すぎなみの大会どうなったんだろう・・・ルールがとっぴでたものだから面白そうだったんだけど・・・
まぁいいや。とりあえずこんな感じでスイマセンm(_ _)m
(^・ω・)ノRadiumProduction in RoboCupJunior
かーなーり。明後日の方向にすっ飛んでますね。
なんでこうなったんだろう。。。まぁいいや
今日の記事はそんな昔に作った流れを復活させるべく、ある課題について、書くことにします。
その課題とは
それに対抗する為にガトリング回し始めたんだっけ・・・
まぁ結局公式大会での第3勢力の登場はなかったと思いますが(笑)
そのもっと昔は坂の角度が60度くらいあったりと無茶苦茶カオスでしたね(あくまで噂です)
さらに昔は坂すらなかったけど・・・
とりあえず、現在のレスキューは人口も増えてきたこともあり、
そういう無法地帯ではなくなってきてしまっているんですね(ある意味つまらん)
でも、障害物に関してだけなら、今はかなり単純になったのでやりやすい・・・かな?
ちなみにこれは2010のルールです。2011になるとこの辺りが真っ赤になりますが
地区大会は2010ルールなので2011ルールはまた今度ということで・・・
と。言うわけで一口に障害物といっても種類は3種類あるわけです。
全部全く違った要素を持っているので、攻略方法も3つそれぞれバラバラになりますね。
今度の記事では今、一般に「障害物」といわれているブロックについて記述しようかなと考えています。
それでは今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
なんでこうなったんだろう。。。まぁいいや
今日の記事はそんな昔に作った流れを復活させるべく、ある課題について、書くことにします。
その課題とは
1.5. Debris:
1.5.1. Debris may be located anywhere in the arena (but NOT in hallways or on the ramp).
Debris may take the form of obstacles to be avoided, speed bumps that should be driven
over, or smaller objects that could be driven over or pushed aside.
1.5.2. Debris may consist of bricks, blocks, weights, speed bumps (made from 10 mm
plastic pipe or wooden dowel painted white), or wooden sticks less than 3 mm in diameter
(e.g. cocktail sticks or kebab skewers)
これです。
これは何かというと、今の日本のレスキューで、所謂「障害物」といわれているものです。
これによると、障害物は坂、通路以外のアリーナ内ならどこにでも置かれる可能性がある。
形は、よけて通る比較的大きいもの、スピードバンプ、押しのけて通れる比較的小さいものの3種類がある。
それで、大きいものは瓦とか重いブロックみたいなもの、
スピードバンプは直径10ミリのプラスチックパイプか木の棒を白く塗ったもの、
または直径3ミリ以内のカクテルスティックやケバブの棒など
みたいな感じになるような気がします。(今文章呼んでその場で訳したので定かではありません)
今のところ定義されているのはこれだけです。昔みたいに多くないです。
簡潔にすると
・障害物はブロックとバンプとちーさい串の3種類
・坂や通路には置かれない
これだけです。
結構未だに勘違いしている人が多いのですが
近くの壁から30センチ以上離す→削除
直線に置かれる→とうの昔に削除
障害物の前後の直線のラインは30cm以上→上の2つがごっちゃに・・・でもそんなルールもあった気がする
2階にはない→そんなこと誰も言ってないですよ
串は2階だけ→2009から1階にもあります
ブロックは真四角→形の記載はないですよ。(瓦に至っては見た事がない)
壁と垂直なラインにのみ置かれる→ギャップと勘違いしてませんか?
ライン上以外にはない→ラインとか関係なくあります
ちっちゃいブロックとかも置いてある→確かに怪しい表記だけどそれが明記されていたのは2009のみ
ラインから10センチ以上はなせば何をおいてもよい→あー5年以上前のルールにそんなのあったなぁ
ラインから10cm以上離れてたら何置いてもよかった頃は
恐竜とか、ロボット、被災者に次いでロボットを攻撃してくる第3勢力とかいろんなのがいたような気がします。
これです。
これは何かというと、今の日本のレスキューで、所謂「障害物」といわれているものです。
これによると、障害物は坂、通路以外のアリーナ内ならどこにでも置かれる可能性がある。
形は、よけて通る比較的大きいもの、スピードバンプ、押しのけて通れる比較的小さいものの3種類がある。
それで、大きいものは瓦とか重いブロックみたいなもの、
スピードバンプは直径10ミリのプラスチックパイプか木の棒を白く塗ったもの、
または直径3ミリ以内のカクテルスティックやケバブの棒など
みたいな感じになるような気がします。(今文章呼んでその場で訳したので定かではありません)
今のところ定義されているのはこれだけです。昔みたいに多くないです。
簡潔にすると
・障害物はブロックとバンプとちーさい串の3種類
・坂や通路には置かれない
これだけです。
結構未だに勘違いしている人が多いのですが
近くの壁から30センチ以上離す→削除
直線に置かれる→とうの昔に削除
障害物の前後の直線のラインは30cm以上→上の2つがごっちゃに・・・でもそんなルールもあった気がする
2階にはない→そんなこと誰も言ってないですよ
串は2階だけ→2009から1階にもあります
ブロックは真四角→形の記載はないですよ。(瓦に至っては見た事がない)
壁と垂直なラインにのみ置かれる→ギャップと勘違いしてませんか?
ライン上以外にはない→ラインとか関係なくあります
ちっちゃいブロックとかも置いてある→確かに怪しい表記だけどそれが明記されていたのは2009のみ
ラインから10センチ以上はなせば何をおいてもよい→あー5年以上前のルールにそんなのあったなぁ
ラインから10cm以上離れてたら何置いてもよかった頃は
恐竜とか、ロボット、被災者に次いでロボットを攻撃してくる第3勢力とかいろんなのがいたような気がします。
それに対抗する為にガトリング回し始めたんだっけ・・・
まぁ結局公式大会での第3勢力の登場はなかったと思いますが(笑)
そのもっと昔は坂の角度が60度くらいあったりと無茶苦茶カオスでしたね(あくまで噂です)
さらに昔は坂すらなかったけど・・・
とりあえず、現在のレスキューは人口も増えてきたこともあり、
そういう無法地帯ではなくなってきてしまっているんですね(ある意味つまらん)
でも、障害物に関してだけなら、今はかなり単純になったのでやりやすい・・・かな?
ちなみにこれは2010のルールです。2011になるとこの辺りが真っ赤になりますが
地区大会は2010ルールなので2011ルールはまた今度ということで・・・
と。言うわけで一口に障害物といっても種類は3種類あるわけです。
全部全く違った要素を持っているので、攻略方法も3つそれぞれバラバラになりますね。
今度の記事では今、一般に「障害物」といわれているブロックについて記述しようかなと考えています。
それでは今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
書いた記事がその場で消えたので 無茶苦茶ブルーになってます。
また書き直しか・・・><。
昨夜、なんか頭いたいなー。と思って今朝病院に行ったら・・・
どうやらインフルだったようです。A型でした。
とりあえずリレンザ貰って帰りました。
それでさっき、書いた記事を確認してたら、
PWMについての説明がないことに気がついてしまいました。
あれじゃなんのこっちゃかわかりませんね・・・
という訳で今日の記事はPWMについてです。
前の記事を呼んでいただければ、
とりあえず「モーターに関係のあるもの」ということはわかっていただけると思います。
PWMというのは、簡単に言うと、一種のモーターの制御方式のことです。
正式にはPulse Width Modulationといって、
パルス派のデューティ比を変化させて変調をする変調方式のことを指します。
でもこっちの話をすると、ちょっと長くなるし、図とかも欲しくなってきちゃいます。
今ちょっとその余裕がないのでモーターの制御方式ということで話を進めようと思います。
まず、ある時間内でのモーターの回転量は何によって決まると思いますか?
電圧?電流?電力?
そのどれもが正解なんですが、ちゃんとした答えを言うと、「電力量」となります。
電力量というのは電力の大きさとその電力を与えている時間をかけたものです。
電力は電流×電圧なので、電力量、つまりモーターの回転量は電圧×電流×時間となります。
なのでモーターの回転量を変えるにはこの中のどれかを変化させてやればよい。ということになりますね。
しかし、電流や電圧を変えるというのは非常にめんどくさいんです。
これは電力の変化はアナログなのに対してロボットの制御はデジタルで行われているからなのですが。
これまた面倒なのでデジアナのことはまた今度ということで。
なので残っている「時間」、つまりモーターに電力を流す時間を変えることによって
モーターの回転量を変えることが簡単にできるようになります。
つまりは、モーターを回したり、とめたりを繰り返すということですね。これがPWM制御です。
でも只、回したり止めたりだと、モーターが回ったりとまったりを繰り返すだけですよね。
なのでPWMでは回したり、止めたりという動作に「高速に」という要素が追加されます。
高速に回したり、止めたりを繰りかえすことによって、
普通に回しているときよりも、一定時間での回転量が少なくなります。
これでモーターの回転量、つまりモーターの回転速度が擬似的に変えられることになります。
つまり、モーターの回転する速度そのものは変わらないけど、回転している時間を減らすことによって
結局進む距離を短くすることができる。これがPWM制御です。
こんな感じで大丈夫でしょうか。
とりあえず今日はこの辺で。
(^・ω・)ノRadiumProduction in RoboCupJunior
また書き直しか・・・><。
昨夜、なんか頭いたいなー。と思って今朝病院に行ったら・・・
どうやらインフルだったようです。A型でした。
とりあえずリレンザ貰って帰りました。
それでさっき、書いた記事を確認してたら、
PWMについての説明がないことに気がついてしまいました。
あれじゃなんのこっちゃかわかりませんね・・・
という訳で今日の記事はPWMについてです。
前の記事を呼んでいただければ、
とりあえず「モーターに関係のあるもの」ということはわかっていただけると思います。
PWMというのは、簡単に言うと、一種のモーターの制御方式のことです。
正式にはPulse Width Modulationといって、
パルス派のデューティ比を変化させて変調をする変調方式のことを指します。
でもこっちの話をすると、ちょっと長くなるし、図とかも欲しくなってきちゃいます。
今ちょっとその余裕がないのでモーターの制御方式ということで話を進めようと思います。
まず、ある時間内でのモーターの回転量は何によって決まると思いますか?
電圧?電流?電力?
そのどれもが正解なんですが、ちゃんとした答えを言うと、「電力量」となります。
電力量というのは電力の大きさとその電力を与えている時間をかけたものです。
電力は電流×電圧なので、電力量、つまりモーターの回転量は電圧×電流×時間となります。
なのでモーターの回転量を変えるにはこの中のどれかを変化させてやればよい。ということになりますね。
しかし、電流や電圧を変えるというのは非常にめんどくさいんです。
これは電力の変化はアナログなのに対してロボットの制御はデジタルで行われているからなのですが。
これまた面倒なのでデジアナのことはまた今度ということで。
なので残っている「時間」、つまりモーターに電力を流す時間を変えることによって
モーターの回転量を変えることが簡単にできるようになります。
つまりは、モーターを回したり、とめたりを繰り返すということですね。これがPWM制御です。
でも只、回したり止めたりだと、モーターが回ったりとまったりを繰り返すだけですよね。
なのでPWMでは回したり、止めたりという動作に「高速に」という要素が追加されます。
高速に回したり、止めたりを繰りかえすことによって、
普通に回しているときよりも、一定時間での回転量が少なくなります。
これでモーターの回転量、つまりモーターの回転速度が擬似的に変えられることになります。
つまり、モーターの回転する速度そのものは変わらないけど、回転している時間を減らすことによって
結局進む距離を短くすることができる。これがPWM制御です。
こんな感じで大丈夫でしょうか。
とりあえず今日はこの辺で。
(^・ω・)ノRadiumProduction in RoboCupJunior
はるかむかしの おはなしです。
LEGOブロックで つくられた ロボット。
センサーポートが たりなくなってしまった ロボット。
ロボットにのこされた さいごのせんたく。
かさねづけ と しゅうつりょくポート での PICとの つうしん。
このつうしんが ちいさなきせきを おこしました。
このおはなしは そんなちいさな ちいさな きせきのものがたり。
そのロボットがうんだ ”きせき” が たいかいのおわりに みたものは。
まぁ奇跡って程のブツでもありませんが。
冒頭の通り、センサーポートがたりなくなって、自作基盤とPICを使って、
センサー基盤を作ったことがあるんですね。
以前紹介した、背景のロボットのものなんですけど。
今日はその基盤についての記事になります。
この基盤、写真があればいいのですが、なぜかデータがない・・・
というわけで今日は文字だけの説明になります。
今度、写真と回路図載せてみますね。時間があればですが(笑)
まずこの基盤制御しているセンサーは、
アナログセンサーが、測距センサ-が2つ、緑センサーがひとつ、よって計3つ
デジタルセンサーは水銀センサーが2つ、3ビット方位センサーがひとつ、よって計3つ
合計は6個です。
方位センサーは3本信号線が必要なので、入力信号は全部で8本。
最初はPICなんて使う予定は全くなかったのですが、どんどんセンサーの数が増えていって、
流石にここまで信号が多いとロジックなんて組む気にならなかったので間にPICを挟む事にしました。
これで簡単に全てのセンサーの値を読むことができました。
次にPICとの相互通信ですが、
RCX側には赤外線通信機能しかありません。それも超のんびりな。
・・・となると、今余ってるポート2の重ねづけでのデジタル入力と、BポートのPWM出力。
これだけで通信をこなわなければなりませんでした。
RCXのポートが入出力固定で、しかもどちらも1つずつしかないので、もう同期通信はできません。
クロック信号を送ることができませんからね。(イヤ、今考えればできたかも。。。)
という訳で非同期通信を行うことにしました。
まず最初に一瞬だけ考えたのがBポートのPWM信号による通信です。
RCXのPWM比は8段階に変えられたのでそれでちょうどいいかなーとか思ったんですが、
RCXのPWMってアテにならないんですよねー(笑)
中のドライバICが残念なんでしょう。
オシロで測ったらなんか凄いことになってた記憶があります。
という訳で断念。その後も色々考えましたが最終的には擬似UARTを作成して乗り切りました。
RCXの信号がくるのをPICで待ってーきたら今のセンサーの値返してーみたいなことをやっていました。
結局、来た信号とRCXに繋がっているセンサーの値、プログラムの進行状態から
なんのセンサーの値が帰ってきているのかを判断するようなプログラムにした気がします。
一体なんてめちゃくちゃなもの作ってるんだか・・・
今度は回路のほうについて紹介します。
が。今日はここまでにしておきます。
また土日かそこらに更新しようかな。
(^・ω・)ノRadiumProduction in RoboCupJunior
LEGOブロックで つくられた ロボット。
センサーポートが たりなくなってしまった ロボット。
ロボットにのこされた さいごのせんたく。
かさねづけ と しゅうつりょくポート での PICとの つうしん。
このつうしんが ちいさなきせきを おこしました。
このおはなしは そんなちいさな ちいさな きせきのものがたり。
そのロボットがうんだ ”きせき” が たいかいのおわりに みたものは。
まぁ奇跡って程のブツでもありませんが。
冒頭の通り、センサーポートがたりなくなって、自作基盤とPICを使って、
センサー基盤を作ったことがあるんですね。
以前紹介した、背景のロボットのものなんですけど。
今日はその基盤についての記事になります。
この基盤、写真があればいいのですが、なぜかデータがない・・・
というわけで今日は文字だけの説明になります。
今度、写真と回路図載せてみますね。時間があればですが(笑)
まずこの基盤制御しているセンサーは、
アナログセンサーが、測距センサ-が2つ、緑センサーがひとつ、よって計3つ
デジタルセンサーは水銀センサーが2つ、3ビット方位センサーがひとつ、よって計3つ
合計は6個です。
方位センサーは3本信号線が必要なので、入力信号は全部で8本。
最初はPICなんて使う予定は全くなかったのですが、どんどんセンサーの数が増えていって、
流石にここまで信号が多いとロジックなんて組む気にならなかったので間にPICを挟む事にしました。
これで簡単に全てのセンサーの値を読むことができました。
次にPICとの相互通信ですが、
RCX側には赤外線通信機能しかありません。それも超のんびりな。
・・・となると、今余ってるポート2の重ねづけでのデジタル入力と、BポートのPWM出力。
これだけで通信をこなわなければなりませんでした。
RCXのポートが入出力固定で、しかもどちらも1つずつしかないので、もう同期通信はできません。
クロック信号を送ることができませんからね。(イヤ、今考えればできたかも。。。)
という訳で非同期通信を行うことにしました。
まず最初に一瞬だけ考えたのがBポートのPWM信号による通信です。
RCXのPWM比は8段階に変えられたのでそれでちょうどいいかなーとか思ったんですが、
RCXのPWMってアテにならないんですよねー(笑)
中のドライバICが残念なんでしょう。
オシロで測ったらなんか凄いことになってた記憶があります。
という訳で断念。その後も色々考えましたが最終的には擬似UARTを作成して乗り切りました。
RCXの信号がくるのをPICで待ってーきたら今のセンサーの値返してーみたいなことをやっていました。
結局、来た信号とRCXに繋がっているセンサーの値、プログラムの進行状態から
なんのセンサーの値が帰ってきているのかを判断するようなプログラムにした気がします。
一体なんてめちゃくちゃなもの作ってるんだか・・・
今度は回路のほうについて紹介します。
が。今日はここまでにしておきます。
また土日かそこらに更新しようかな。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日の記事は汎用の加速度センサーについてです。
本当なら今日はプレゼンの資料や現代社会論のレポートとかやらないとそろそろやばいんですが
昨日の深夜にサッカーアジアカップ見て徹夜して朝になってから寝たせいか、
全くやる気が起こらないので先に更新しちゃいます。
加速度センサーにも色々ありますが
とりあえず、入手しやすい3軸加速度センサーをふたつ、今日は紹介したいと思います。
まずはこちら

これは秋月電子通商で販売されている3軸加速度センサーモジュールです。
型番はKXM52-1050だったかな。
これは3方向の加速度をそれぞれ、アナログで出力するというものです。
-2Gから+2Gまで測定ができ、信号の設定で-1Gから+3Gに変更もできるようです。
お次はこちら。

これも秋月電子通商で販売されています。 KXP84-2050という型番の3軸加速度センサーです。
これは上のものと何が違うかというと、出力形式が違います。
上のものは出力はアナログだけでしたが、
こちらのはアナログのほかに、SPIとI2Cという通信規格を採用しています。
まぁボーレートが違うのでNXTとのI2C通信はできませんが。
只、I2Cが使えるということもあり、マイコンを使う際には非常に便利なセンサーとなっています。
しかし、出力範囲は-2Gから+2Gまでの固定だったかと思います。あと日本語の説明書が一切ないです。
ちなみに値段はどちらとも1000円です。
そうそう。最近気がついたのですが、加速度センサーというものは自分でわかっていても、
結構速度センサーと間違えられることが多いみたいです。
まぁ一瞬の思い込み?みたいなやつでしょうか。
加速度センサーはあくまでも加速度、速度の違いを検地するものなので
静止時と等速移動時の値は同じですよね。
それと大きな特徴として、値が大きいほどその値が出力される時間が少なくなり、
値が小さいとその値が出力される時間が長くなります。
これは加速度が大きいほうが速度が安定するのにかかる時間が少ないからですね。
まぁ上海でリニアとかに乗ってたら、結構長い時間値振り切れてそうですけど。
一般的にそーゆー特徴があるので出力値を検知する側としてはちょっと厄介ですね。
特にレスキューロボットの場合、急停止、急発進が多くあるのでかなり難しい気もします。
やっぱりいいセンサーを使うとなるとこちら側もそれなりの力がいるよー。ってことなのでしょうね。
まぁうちののんびり屋さんにのせようとしたら簡単なんでしょうけど(笑)
それではまた
(^・ω・)ノRadiumProduction in RoboCupJunior
本当なら今日はプレゼンの資料や現代社会論のレポートとかやらないとそろそろやばいんですが
昨日の深夜にサッカーアジアカップ見て徹夜して朝になってから寝たせいか、
全くやる気が起こらないので先に更新しちゃいます。
加速度センサーにも色々ありますが
とりあえず、入手しやすい3軸加速度センサーをふたつ、今日は紹介したいと思います。
まずはこちら
これは秋月電子通商で販売されている3軸加速度センサーモジュールです。
型番はKXM52-1050だったかな。
これは3方向の加速度をそれぞれ、アナログで出力するというものです。
-2Gから+2Gまで測定ができ、信号の設定で-1Gから+3Gに変更もできるようです。
お次はこちら。
これも秋月電子通商で販売されています。 KXP84-2050という型番の3軸加速度センサーです。
これは上のものと何が違うかというと、出力形式が違います。
上のものは出力はアナログだけでしたが、
こちらのはアナログのほかに、SPIとI2Cという通信規格を採用しています。
まぁボーレートが違うのでNXTとのI2C通信はできませんが。
只、I2Cが使えるということもあり、マイコンを使う際には非常に便利なセンサーとなっています。
しかし、出力範囲は-2Gから+2Gまでの固定だったかと思います。あと日本語の説明書が一切ないです。
ちなみに値段はどちらとも1000円です。
そうそう。最近気がついたのですが、加速度センサーというものは自分でわかっていても、
結構速度センサーと間違えられることが多いみたいです。
まぁ一瞬の思い込み?みたいなやつでしょうか。
加速度センサーはあくまでも加速度、速度の違いを検地するものなので
静止時と等速移動時の値は同じですよね。
それと大きな特徴として、値が大きいほどその値が出力される時間が少なくなり、
値が小さいとその値が出力される時間が長くなります。
これは加速度が大きいほうが速度が安定するのにかかる時間が少ないからですね。
まぁ上海でリニアとかに乗ってたら、結構長い時間値振り切れてそうですけど。
一般的にそーゆー特徴があるので出力値を検知する側としてはちょっと厄介ですね。
特にレスキューロボットの場合、急停止、急発進が多くあるのでかなり難しい気もします。
やっぱりいいセンサーを使うとなるとこちら側もそれなりの力がいるよー。ってことなのでしょうね。
まぁうちののんびり屋さんにのせようとしたら簡単なんでしょうけど(笑)
それではまた
(^・ω・)ノRadiumProduction in RoboCupJunior
まず最初に。 このブログをご覧になる際は酔い止めを飲んでからにしてください。
「普通に読むと酔う!」との苦情がきました。
だからといって色彩を変えるとかそういう対策はする気全くないです。
だってめんどく(ry
今日は杉並科学館での合同練習会に逝ってきました。
まぁ行くといっても競技者側ではなく講師側ですが(笑)
でも。競技者としてでたら、僕じゃまず勝てないでしょうねー(笑)
杉並の子たち、実力があるからねぇ。。どうしたものか。。。
でも僕がみて「勝てない!」って思った理由はそこじゃないんです。(イヤ、それもありますが)
なんだか知らないんですが、皆さんロボットの動きが
速い!
話によると50%程の出力で走っていたロボットが、こっちの全力(100%)の倍ぐらい速いという事態に。
同じハード使って同じ電池使ってどうしてこんなに違うwww
キャタの径も同じなのになぜなんでしょうね。電池の残量もこっちはMAXのはずなのに・・・
プログラムとかロボットとかの作成以前に、こんな差がでてしまうと作る気が全くでなくなりますねー
やっぱり杉並の強さは伊達じゃないということでしょうか。
っていうかマジで気になるんだけど!なんで!?
そもそもモーターの回転音が全然違った気が・・・謎は深まるばかりです。
(^・ω・)ノRadiumProduction in RoboCupJunior
追記:うちに帰ってロボットを動かしてみたらなんとRCXと同速という事態に。
ここでまさかの高専のモーターor電池に問題説が浮上しました。
・・・もしかして俺が遅いだけ?
「普通に読むと酔う!」との苦情がきました。
だからといって色彩を変えるとかそういう対策はする気全くないです。
だってめんどく(ry
今日は杉並科学館での合同練習会に逝ってきました。
まぁ行くといっても競技者側ではなく講師側ですが(笑)
でも。競技者としてでたら、僕じゃまず勝てないでしょうねー(笑)
杉並の子たち、実力があるからねぇ。。どうしたものか。。。
でも僕がみて「勝てない!」って思った理由はそこじゃないんです。(イヤ、それもありますが)
なんだか知らないんですが、皆さんロボットの動きが
速い!
話によると50%程の出力で走っていたロボットが、こっちの全力(100%)の倍ぐらい速いという事態に。
同じハード使って同じ電池使ってどうしてこんなに違うwww
キャタの径も同じなのになぜなんでしょうね。電池の残量もこっちはMAXのはずなのに・・・
プログラムとかロボットとかの作成以前に、こんな差がでてしまうと作る気が全くでなくなりますねー
やっぱり杉並の強さは伊達じゃないということでしょうか。
っていうかマジで気になるんだけど!なんで!?
そもそもモーターの回転音が全然違った気が・・・謎は深まるばかりです。
(^・ω・)ノRadiumProduction in RoboCupJunior
追記:うちに帰ってロボットを動かしてみたらなんとRCXと同速という事態に。
ここでまさかの高専のモーターor電池に問題説が浮上しました。
・・・もしかして俺が遅いだけ?
今日は前回の続きで坂センサーの話題です。
今回は予告通り加速度センサーについてです。
でもこれも記事を書いてて、何回かに分けようかな・・・と考え始めました。
というのも今回僕が紹介しようと思っている加速度センサーは全部で3つもあるからです。
最近、「記事を短くして省エネ(?)運動」を行っているので、
ひとつの記事を短くしようと頑張っています。なので記事を分けると言う結論に。。。
長い前書きは置いておいて、タイトルにもありますように、今日はLEGOの加速度センサーについてです。
この加速度センサーはhitechnic社が発売している正規のLEGO用3次元加速度センサーです。

写真を見ればわかるように、
(外見的な意味で)他のNXTのセンサーとの違いが全くワカリマセン(汗)
hitechnicのセンサーは全部こんな感じなのですが、とりあえず、
みただけじゃなんのセンサーかわからないようにするという陰湿なデザインはやめて欲しいです
因みに裏にはちゃんと「あくせるせんさー」と記載されています。

中学の頃に初めてこれを見た人は、「アクセルって加速のことだったんだー!」ってなるのが通例なようです。
そんな加速度センサーですが、じゃあどうやって使うの?というと、
hitechnic社のサイトに使い方。ありましたね。
因みに他のhitechnicのセンサーの使い方もありましたよ。
まぁ一応英語ですが、サンプルプログラムがあるので、この際言語なんて関係ないですね。
僕はNXCという言語を使用しているので、NXCでの使用方法を・・・と。
とりあえず関数は見つけました。が・・・
bool ReadSensorHTAccel(const byte port,int & x,int & y,int & z )
あれ?
これ勝手に3つともの値きちゃうんですか?
ポートの指定と、値を押し込む変数のアドレスしか宣言されていません。
どうにもこの関数だと3方向とも全部勝手に値が返ってきちゃうみたいですね。
これ。使えませんね(泣)
なんで使えないかというと、僕は使用用途的にも、3方向もの加速度のデータなんて要らないんです。
多くても2つかな。3方向同時になんて読むことは多分無いと思います。
なのにわざわざめっさ時間のかかるI2C通信を3方向分行なうだなんて・・・
ちょっと3回もやると時間かかりすぎて他の動きに支障でそうですね・・・
しょうがない。入試休みにでも加速度センサー用の関数でも作りますか。
とはいえ、市販の加速度センサーを使えばあっという間に解決ですが(笑)
と云うわけで次は汎用の加速度センサーを紹介します。きっと。←
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCupJunior
追記:なんか自作関数はあっという間にできちゃいました(笑)
今回は予告通り加速度センサーについてです。
でもこれも記事を書いてて、何回かに分けようかな・・・と考え始めました。
というのも今回僕が紹介しようと思っている加速度センサーは全部で3つもあるからです。
最近、「記事を短くして省エネ(?)運動」を行っているので、
ひとつの記事を短くしようと頑張っています。なので記事を分けると言う結論に。。。
長い前書きは置いておいて、タイトルにもありますように、今日はLEGOの加速度センサーについてです。
この加速度センサーはhitechnic社が発売している正規のLEGO用3次元加速度センサーです。
写真を見ればわかるように、
(外見的な意味で)他のNXTのセンサーとの違いが全くワカリマセン(汗)
hitechnicのセンサーは全部こんな感じなのですが、とりあえず、
みただけじゃなんのセンサーかわからないようにするという陰湿なデザインはやめて欲しいです
因みに裏にはちゃんと「あくせるせんさー」と記載されています。
中学の頃に初めてこれを見た人は、「アクセルって加速のことだったんだー!」ってなるのが通例なようです。
そんな加速度センサーですが、じゃあどうやって使うの?というと、
hitechnic社のサイトに使い方。ありましたね。
因みに他のhitechnicのセンサーの使い方もありましたよ。
まぁ一応英語ですが、サンプルプログラムがあるので、この際言語なんて関係ないですね。
僕はNXCという言語を使用しているので、NXCでの使用方法を・・・と。
とりあえず関数は見つけました。が・・・
bool ReadSensorHTAccel(const byte port,int & x,int & y,int & z )
あれ?
これ勝手に3つともの値きちゃうんですか?
ポートの指定と、値を押し込む変数のアドレスしか宣言されていません。
どうにもこの関数だと3方向とも全部勝手に値が返ってきちゃうみたいですね。
これ。使えませんね(泣)
なんで使えないかというと、僕は使用用途的にも、3方向もの加速度のデータなんて要らないんです。
多くても2つかな。3方向同時になんて読むことは多分無いと思います。
なのにわざわざめっさ時間のかかるI2C通信を3方向分行なうだなんて・・・
ちょっと3回もやると時間かかりすぎて他の動きに支障でそうですね・・・
しょうがない。入試休みにでも加速度センサー用の関数でも作りますか。
とはいえ、市販の加速度センサーを使えばあっという間に解決ですが(笑)
と云うわけで次は汎用の加速度センサーを紹介します。きっと。←
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCupJunior
追記:なんか自作関数はあっという間にできちゃいました(笑)
今日は有り得ないぐらい眠いです。レポ徹が原因でしょうか。
今日は以前の続きでチルトセンサーと水銀スイッチのハナシでもしましょうか。
これがチルトセンサー。

これが水銀スイッチです。

これは両方とも傾斜センサーとして販売されています。
内部構造はどちらも同じで、中に菅が入っていて、その中に導体がはいっています。
菅の端子側の端には2つの電極があってセンサーを平行にした場合導体は端子に触れていないけど、
端子側が下になるように傾けると管内の導体が移動して2つの電極に触れて、
それによって電気を流すセンサーです。
つまり角度によってON/OFFが変わるスイッチのようなものです。
これを利用することによって坂を検知することができる訳です。
因みに中には、水銀スイッチは名前どおり無機水銀がはいっており、
チルトセンサーは固体の金属球がはいっています。
まぁこんな感じかな。
加速度センサーについては今度お話します。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日は以前の続きでチルトセンサーと水銀スイッチのハナシでもしましょうか。
これがチルトセンサー。
これが水銀スイッチです。
これは両方とも傾斜センサーとして販売されています。
内部構造はどちらも同じで、中に菅が入っていて、その中に導体がはいっています。
菅の端子側の端には2つの電極があってセンサーを平行にした場合導体は端子に触れていないけど、
端子側が下になるように傾けると管内の導体が移動して2つの電極に触れて、
それによって電気を流すセンサーです。
つまり角度によってON/OFFが変わるスイッチのようなものです。
これを利用することによって坂を検知することができる訳です。
因みに中には、水銀スイッチは名前どおり無機水銀がはいっており、
チルトセンサーは固体の金属球がはいっています。
まぁこんな感じかな。
加速度センサーについては今度お話します。
(^・ω・)ノRadiumProduction in RoboCupJunior
NXTの充電池が新しくなったようです。
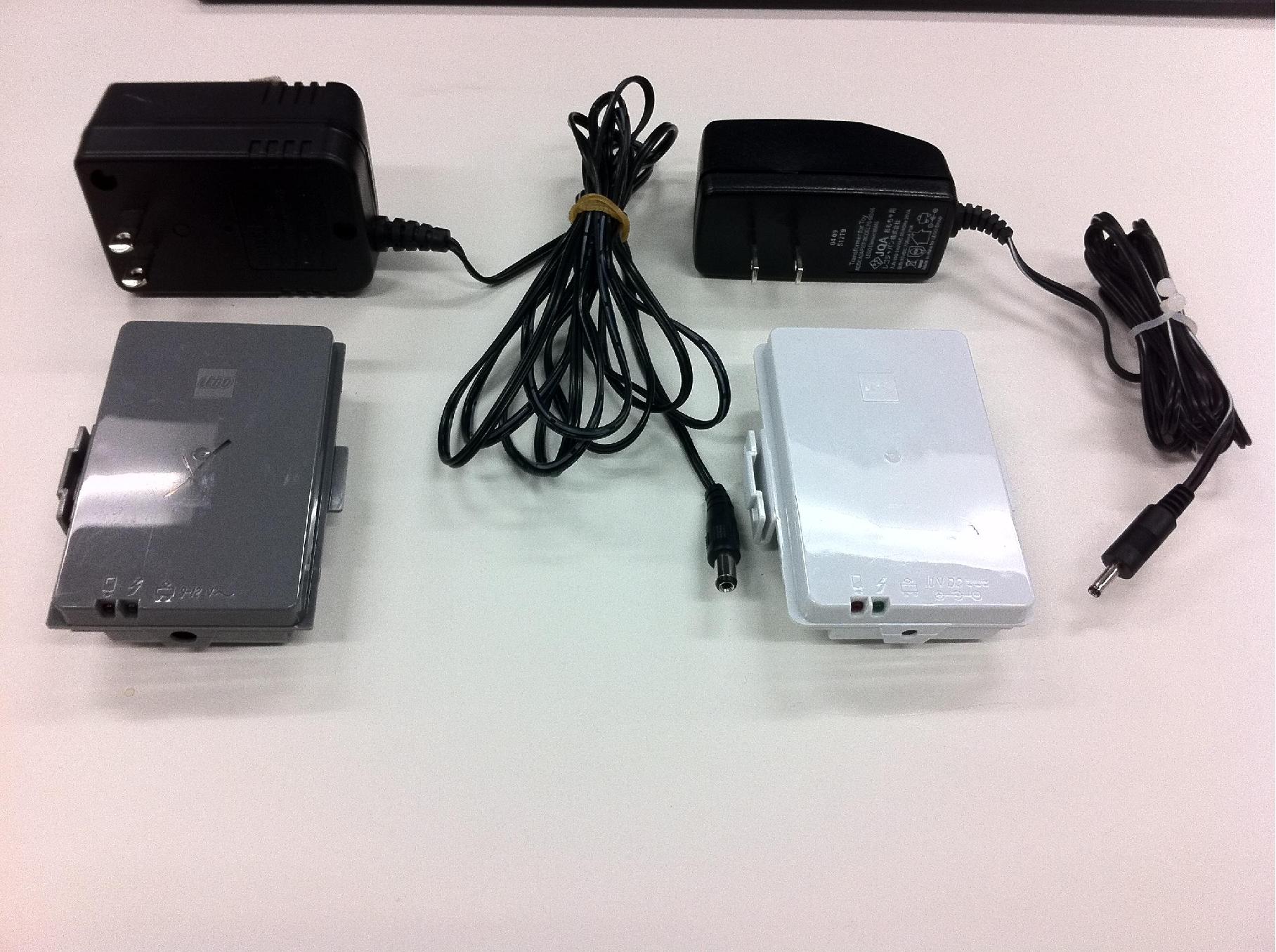
左が旧型、右が新型です。
真っ白になってますね。ちょっとかっこいい?
また、それに伴い、充電機も従来のAC-ACからAC-DCになったようです。
つまり充電器と充電池の新旧の混同使用はできないようです。
しかし、NXT側は従来のものでもこれに対応していいるんだとか。
発熱問題は解決されたのでしょうか。。。ちょっと様子を見て買ってみようかな。
(^・ω・)ノRadiumProduction in RoboCupJunior
左が旧型、右が新型です。
真っ白になってますね。ちょっとかっこいい?
また、それに伴い、充電機も従来のAC-ACからAC-DCになったようです。
つまり充電器と充電池の新旧の混同使用はできないようです。
しかし、NXT側は従来のものでもこれに対応していいるんだとか。
発熱問題は解決されたのでしょうか。。。ちょっと様子を見て買ってみようかな。
(^・ω・)ノRadiumProduction in RoboCupJunior
学校きてからも、うちに帰ってからも、いっつも寝てる気がします。
昨日(一昨日?)かな?今年はいってから5回目のロボットの作成を行いました。
結果としてとてものんびりしたロボットができましたね。
まぁ東京関東で速度勝負になる!ってことはないような気がするのでこれでいこうかな。。。
JAPAN?いけたときに考えればいいのさ♪って今はそんな感じですね。
そんな今日はセンサーの話。
以前。レスキュー競技に有効なセンサーのハナシなどといっておいて、
長々と書いて結局ライトセンサーについてしか話さないという大惨事をやらかしたかと思うんですが、
その続きでも・・・と。
ライントレース。センサーの個数のハナシはまた今度するとして、
ひとまずライトセンサーが一般的なんだなぁと云うことは理解していただけたと思います。
でもレスキューにはライントレース以外にも様々な要素があります。
ここで・・・ちょっと2010年度のレスキュー競技のルールを確認してみましょう。
ここではその特別な要素については1.Arenaで書かれており、
基本的には3.5.Scoringによって課題として点数化されています。
そのArena項目によると・・・
まず、フィールドについての説明があって、次にフロアの説明、そんでラインについて書かれていますね。
まずここまでで、1.1に
Modules on different levels are connected by a sloping hallway or ramp. A ramp will not exceed an incline of 25 degrees from the horizontal, and must have walls at least 10 cm high
とあります。
まぁ要訳すると、
フィールドには坂があるよ。その坂は傾斜角25度以内で高さ10cmの壁がつくよ。といってますね。
あと1.6では「坂にはラインが無いかもしれない」と書かれていますね。
つまり坂からはライントレース以外の方法で先に進め。ということですね。
ってことは、坂以降ではライントレースプログラムは機能しない、
変わりに何か別のプログラムを走らせなければいけない。ということになりますね。
そうなると、プログラムの切り替え方法をどうするか。そこが問題になるわけです。
「こんだけ走ったからそろそろ坂だろ」なんてタイマーでテキトーに坂プログラムに入るわけにもいかないので
「なにか」で坂を検知してプログラムを切り替えることが必要ですね。
そこで、その「なにか」、つまり坂を検知するセンサーが必要になってくるわけです。
んじゃどんなセンサーなら坂を検知できるのか。と云う話が次に待っています。
今、巷で流行っている坂センサーと言うと・・・
・タッチセンサー
・チルトセンサー
・水銀スイッチ
・加速度センサー
このあたりでしょうか。
まずタッチセンサー。これは2通りのパターンがあります。
まずはロボットの前または後ろに床と垂直にスイッチ部を付ける方法。
これで前の場合はロボットが坂の前に来たとき、
後ろの場合は坂に入ってロボットの向きが傾いた際にのみセンサーが反応します。
後者のほうは後ろタッチと呼ばれていてLEGOレスキューⅠとかいうチームが最初に採用した技術です。
当時のレスキュー競技では坂からラインがないとかいうことはなかったので、
坂の検知は必要なかったのですが、坂を上る際に通常のライントレースの方法だとずり落ちるらしく、
その対策として使用したようです。
その対策が功を奏し、2006年度の東京ノードでは優勝していましたね。
でもその元チームメンバーがいうには、「今の競技では使えない」そうです。
坂の間ずっとセンサーが反応しているわけではないので「坂が終わったこと」が検知できないんだそうです。
それで最近のセンサーは全て坂にいる間、反応し続けているものになっているようです。
よくタッチセンサーで使われる手法は前後に動く重りなどをタッチセンサーの前に乗せて
坂で傾斜に入った際に重りが後ろにいくことでタッチセンサーが押される手法でしょうか。
まぁ今日はテストも近いのでこの辺で終わりにしましょう。
チルトセンサー以降はまた今度で・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
昨日(一昨日?)かな?今年はいってから5回目のロボットの作成を行いました。
結果としてとてものんびりしたロボットができましたね。
まぁ東京関東で速度勝負になる!ってことはないような気がするのでこれでいこうかな。。。
JAPAN?いけたときに考えればいいのさ♪って今はそんな感じですね。
そんな今日はセンサーの話。
以前。レスキュー競技に有効なセンサーのハナシなどといっておいて、
長々と書いて結局ライトセンサーについてしか話さないという大惨事をやらかしたかと思うんですが、
その続きでも・・・と。
ライントレース。センサーの個数のハナシはまた今度するとして、
ひとまずライトセンサーが一般的なんだなぁと云うことは理解していただけたと思います。
でもレスキューにはライントレース以外にも様々な要素があります。
ここで・・・ちょっと2010年度のレスキュー競技のルールを確認してみましょう。
ここではその特別な要素については1.Arenaで書かれており、
基本的には3.5.Scoringによって課題として点数化されています。
そのArena項目によると・・・
まず、フィールドについての説明があって、次にフロアの説明、そんでラインについて書かれていますね。
まずここまでで、1.1に
Modules on different levels are connected by a sloping hallway or ramp. A ramp will not exceed an incline of 25 degrees from the horizontal, and must have walls at least 10 cm high
とあります。
まぁ要訳すると、
フィールドには坂があるよ。その坂は傾斜角25度以内で高さ10cmの壁がつくよ。といってますね。
あと1.6では「坂にはラインが無いかもしれない」と書かれていますね。
つまり坂からはライントレース以外の方法で先に進め。ということですね。
ってことは、坂以降ではライントレースプログラムは機能しない、
変わりに何か別のプログラムを走らせなければいけない。ということになりますね。
そうなると、プログラムの切り替え方法をどうするか。そこが問題になるわけです。
「こんだけ走ったからそろそろ坂だろ」なんてタイマーでテキトーに坂プログラムに入るわけにもいかないので
「なにか」で坂を検知してプログラムを切り替えることが必要ですね。
そこで、その「なにか」、つまり坂を検知するセンサーが必要になってくるわけです。
んじゃどんなセンサーなら坂を検知できるのか。と云う話が次に待っています。
今、巷で流行っている坂センサーと言うと・・・
・タッチセンサー
・チルトセンサー
・水銀スイッチ
・加速度センサー
このあたりでしょうか。
まずタッチセンサー。これは2通りのパターンがあります。
まずはロボットの前または後ろに床と垂直にスイッチ部を付ける方法。
これで前の場合はロボットが坂の前に来たとき、
後ろの場合は坂に入ってロボットの向きが傾いた際にのみセンサーが反応します。
後者のほうは後ろタッチと呼ばれていてLEGOレスキューⅠとかいうチームが最初に採用した技術です。
当時のレスキュー競技では坂からラインがないとかいうことはなかったので、
坂の検知は必要なかったのですが、坂を上る際に通常のライントレースの方法だとずり落ちるらしく、
その対策として使用したようです。
その対策が功を奏し、2006年度の東京ノードでは優勝していましたね。
でもその元チームメンバーがいうには、「今の競技では使えない」そうです。
坂の間ずっとセンサーが反応しているわけではないので「坂が終わったこと」が検知できないんだそうです。
それで最近のセンサーは全て坂にいる間、反応し続けているものになっているようです。
よくタッチセンサーで使われる手法は前後に動く重りなどをタッチセンサーの前に乗せて
坂で傾斜に入った際に重りが後ろにいくことでタッチセンサーが押される手法でしょうか。
まぁ今日はテストも近いのでこの辺で終わりにしましょう。
チルトセンサー以降はまた今度で・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ