RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
今日の記事ですが、抵抗の話について
最後の「実際の抵抗値、カラーコードの見方」についてです。
カラーコードについての話はここを参考にしてください。
この記事では実際の抵抗の写真を用いて「カラーコードを読む」ということを行います。

まずはこの抵抗。
右から、灰、赤、黒、金ですね。
この抵抗は一見どちらが第1色帯かがわかりませんが、
金という色は第1色帯にはありませんので反対の灰が第1色帯ですね。
つまり第1色帯から灰、赤、黒、金となります。
どちらが第1色帯かがわかれば、もう抵抗値はわかりますよね。
カラーコード表から、第1色帯の灰は8、第2色帯の赤は2となるので抵抗の数値は82となります。
そして第3色帯、これが重要になるわけですが、この色は黒なので値は1となります。
実際の抵抗値はこの第1、第2色帯から導き出された82という値と第3色帯の1という値をかけて求めます。
つまりこの抵抗の場合、82×1で82Ωとなります。
最後に第4色帯。これは抵抗の製造誤差の許容量を示しています。
この第4色帯はこの抵抗だと金になっています。金はカラーコード表によると誤差5%となっています。
つまりこの抵抗は82Ωから±5%抵抗値がずれることが許容されることになります。
つまりこの抵抗の抵抗値は77.9Ωから86.1Ωであるということになります。
次にこの2つの抵抗。

上の抵抗は茶黒橙金、
下の抵抗は茶黒赤金ですね。
上の抵抗ですが、第1=茶=1、第2=黒=0で合計は10
第3=橙なので、抵抗値は10×103で10000Ωとなりますね。
SI接頭辞を使いますと10kΩとなります。通常はこちらを使いますね。
下の抵抗も、第1=茶=1、第2=黒=0で合計は10
第3=赤なので、抵抗値は10×102で1000Ωとなりますね。
SI接頭辞を使いますと1kΩとなります。
両方とも誤差は金なので±5%となりますね。
最後にこの抵抗。

金属皮膜抵抗といって今まで紹介したカーボン抵抗より精度がいいものです。
これは線が5本ありますね。この場合は第3色帯までが抵抗の数になります。
つまり第1=茶=1、第2=黒=0、第3=緑=5、
これで値は105となります。
そして第4色帯、これが上で算出した値とかけられます。
第4色帯は金で0.1となるのでかけると10.5、つまり抵抗値は10.5Ωとなりますね。
また、誤差の第5色帯は茶色となっているので±1%となっていますね。
以上で抵抗の説明を終わります。
ちなみに用語としては第1、第2色帯は実数部、第3色帯は仮数部、第4色帯は許容誤差となっています。
抵抗についての記事は此方です。
(^・ω・)ノRadiumProduction in RoboCup Junior
最後の「実際の抵抗値、カラーコードの見方」についてです。
カラーコードについての話はここを参考にしてください。
この記事では実際の抵抗の写真を用いて「カラーコードを読む」ということを行います。
まずはこの抵抗。
右から、灰、赤、黒、金ですね。
この抵抗は一見どちらが第1色帯かがわかりませんが、
金という色は第1色帯にはありませんので反対の灰が第1色帯ですね。
つまり第1色帯から灰、赤、黒、金となります。
どちらが第1色帯かがわかれば、もう抵抗値はわかりますよね。
カラーコード表から、第1色帯の灰は8、第2色帯の赤は2となるので抵抗の数値は82となります。
そして第3色帯、これが重要になるわけですが、この色は黒なので値は1となります。
実際の抵抗値はこの第1、第2色帯から導き出された82という値と第3色帯の1という値をかけて求めます。
つまりこの抵抗の場合、82×1で82Ωとなります。
最後に第4色帯。これは抵抗の製造誤差の許容量を示しています。
この第4色帯はこの抵抗だと金になっています。金はカラーコード表によると誤差5%となっています。
つまりこの抵抗は82Ωから±5%抵抗値がずれることが許容されることになります。
つまりこの抵抗の抵抗値は77.9Ωから86.1Ωであるということになります。
次にこの2つの抵抗。
上の抵抗は茶黒橙金、
下の抵抗は茶黒赤金ですね。
上の抵抗ですが、第1=茶=1、第2=黒=0で合計は10
第3=橙なので、抵抗値は10×103で10000Ωとなりますね。
SI接頭辞を使いますと10kΩとなります。通常はこちらを使いますね。
下の抵抗も、第1=茶=1、第2=黒=0で合計は10
第3=赤なので、抵抗値は10×102で1000Ωとなりますね。
SI接頭辞を使いますと1kΩとなります。
両方とも誤差は金なので±5%となりますね。
最後にこの抵抗。
金属皮膜抵抗といって今まで紹介したカーボン抵抗より精度がいいものです。
これは線が5本ありますね。この場合は第3色帯までが抵抗の数になります。
つまり第1=茶=1、第2=黒=0、第3=緑=5、
これで値は105となります。
そして第4色帯、これが上で算出した値とかけられます。
第4色帯は金で0.1となるのでかけると10.5、つまり抵抗値は10.5Ωとなりますね。
また、誤差の第5色帯は茶色となっているので±1%となっていますね。
以上で抵抗の説明を終わります。
ちなみに用語としては第1、第2色帯は実数部、第3色帯は仮数部、第4色帯は許容誤差となっています。
抵抗についての記事は此方です。
(^・ω・)ノRadiumProduction in RoboCup Junior
忘れてました。抵抗のカラーコードについてですね。
商品の情報を読み取るのに、バーコード というものがありますよね。
それと同じように抵抗にもその抵抗の情報、つまり抵抗値を読み取るためのカラーコードというものがあります。
でも、バーコードのように複雑ではないので各4本の線が示す意味、そして色そのものの意味さえ覚えれば簡単です。
(バーコードも実はある程度なら人力でも読めるんですよ♪)
まず一般的な4本表示の抵抗のカラーコードの線の意味を説明します。

抵抗の線は必ず端からこの順番で並んでいます。第1、第2、第3、第4の順番です。
まず第1色帯、抵抗の膨らんでいる部分にある線は大体が第一色帯です。
これは抵抗値の一番上の桁の数字を示しています。
数値は色によって示されますが、どの色がどの数字にあたるかは後程他の色帯と合わせて紹介します。
次に第2色帯。これは抵抗値の上から2番の桁の数字を示しています。
これも同じように数値は色によって示されます。数値と色の対照は第1色帯のものと同じです。
次に第3色帯、これは乗数をという考え方で抵抗の値を示すものです。
ちょっと説明しにくいのであとで説明します。
最後に第4色帯。これは抵抗の誤差率を示しています。
これは製造時の、「カラーコードに記載されている抵抗値(公称値)と実際の抵抗の抵抗値の許容誤差」のことです。
これも同じように数値は色によって示されます。数値と色の対照はちょっと他と異なりますので別途覚えてくださいね。
次に色と数値の対照です。

このようになっています。
誤差の部分に関してはこの表以外にもいくつか割り当てられているようで
黒・・・20%
橙・・・0.05%といったものが知られていますね。
ちょっと頭のいい人でなくても第1から第3に関しては、黒から白にかけて、
0から9の数値が順番に割り振られているのがわかると思います。
しかもロボカップ程度の回路の場合、誤差の部分は基本的に金と茶色しか使いません。
つまり、全部覚えなくても金茶の誤差、金銀無の意味と黒から白の順番さえ覚えておけば大体大丈夫です。
しかも赤から紫の6色は虹と同じ並びになっていたりします。
そんだけ覚えられれば残り6色はリズムで人間何とかなるもんです。きっと。
でも虹って一般的に七色ですよね。何色が足りないんだろ。まぁ抵抗の虹は6色です。
人はこれを抵抗の虹、”Rainbow resistance”と呼びます。(一部地域限定)
まぁきっとこれでおぼえるでしょ。うん。
因みに、なんで第3色帯の黒のところが1になるのかは中学の数学の授業で習うと思います。
あと、線が5本ある抵抗とかもありますがその場合は第3色帯が抵抗値の上から3桁目の値を示すようになって
乗数が第4色帯、誤差が第5色帯になるだけです。
今度の記事では第色帯の説明を、実際の抵抗の値をだしつつ、説明でもします。
それでは
抵抗についての記事はこちら
実際の抵抗値の導き方はこちら
(^・ω・)ノRadiumProduction in RoboCupJunior
商品の情報を読み取るのに、バーコード というものがありますよね。
それと同じように抵抗にもその抵抗の情報、つまり抵抗値を読み取るためのカラーコードというものがあります。
でも、バーコードのように複雑ではないので各4本の線が示す意味、そして色そのものの意味さえ覚えれば簡単です。
(バーコードも実はある程度なら人力でも読めるんですよ♪)
まず一般的な4本表示の抵抗のカラーコードの線の意味を説明します。
抵抗の線は必ず端からこの順番で並んでいます。第1、第2、第3、第4の順番です。
まず第1色帯、抵抗の膨らんでいる部分にある線は大体が第一色帯です。
これは抵抗値の一番上の桁の数字を示しています。
数値は色によって示されますが、どの色がどの数字にあたるかは後程他の色帯と合わせて紹介します。
次に第2色帯。これは抵抗値の上から2番の桁の数字を示しています。
これも同じように数値は色によって示されます。数値と色の対照は第1色帯のものと同じです。
次に第3色帯、これは乗数をという考え方で抵抗の値を示すものです。
ちょっと説明しにくいのであとで説明します。
最後に第4色帯。これは抵抗の誤差率を示しています。
これは製造時の、「カラーコードに記載されている抵抗値(公称値)と実際の抵抗の抵抗値の許容誤差」のことです。
これも同じように数値は色によって示されます。数値と色の対照はちょっと他と異なりますので別途覚えてくださいね。
次に色と数値の対照です。
このようになっています。
誤差の部分に関してはこの表以外にもいくつか割り当てられているようで
黒・・・20%
橙・・・0.05%といったものが知られていますね。
ちょっと頭のいい人でなくても第1から第3に関しては、黒から白にかけて、
0から9の数値が順番に割り振られているのがわかると思います。
しかもロボカップ程度の回路の場合、誤差の部分は基本的に金と茶色しか使いません。
つまり、全部覚えなくても金茶の誤差、金銀無の意味と黒から白の順番さえ覚えておけば大体大丈夫です。
しかも赤から紫の6色は虹と同じ並びになっていたりします。
そんだけ覚えられれば残り6色はリズムで人間何とかなるもんです。きっと。
でも虹って一般的に七色ですよね。何色が足りないんだろ。まぁ抵抗の虹は6色です。
人はこれを抵抗の虹、”Rainbow resistance”と呼びます。(一部地域限定)
まぁきっとこれでおぼえるでしょ。うん。
因みに、なんで第3色帯の黒のところが1になるのかは中学の数学の授業で習うと思います。
あと、線が5本ある抵抗とかもありますがその場合は第3色帯が抵抗値の上から3桁目の値を示すようになって
乗数が第4色帯、誤差が第5色帯になるだけです。
今度の記事では第色帯の説明を、実際の抵抗の値をだしつつ、説明でもします。
それでは
抵抗についての記事はこちら
実際の抵抗値の導き方はこちら
(^・ω・)ノRadiumProduction in RoboCupJunior
ここから暫くCircuitカテゴリーでは、「素子」についての記事を書いていこうと考えています。
その「素子」というものですが、素子というのは、電子回路を構成するうえでの最小のパーツのことを指します。
まぁつまり「はんだづけ」の作業でつける対象となるちっちゃいパーツのことですね。
全ての電子回路(つまりNXTやセンサー等も)全てこの素子によって作られています。
よくわからない人は、この際今はわからなくても大丈夫です。
これから暫くこのカテゴリーで紹介していくものは全部素子です。
という訳で今日は1回目。
最初に紹介する素子は・・・
「抵抗」です。
この名の通り、電流に対しての抵抗になります。つまり電流を流す量を制限するものです。
この「抵抗」というものですが、物理的で客観的な値として量記号と単位が存在して、
量記号はR、単位はΩとされています。
ここからは具体的な抵抗による電流の制限について、説明します。
単刀直入に式だけ説明しますと、
抵抗、そして電流と電圧の間にはこういった関係式が成り立ちます。
V=I×R
抵抗にかかる電圧は抵抗に流れる電流と抵抗をかけたもの、になる訳ですね。
この式をオームの法則といいます。
式はこれだけなのですが、どういうことかよくわからないかもしれません。実際の回路を使って説明しますね。
まず、こんな回路があったとします。
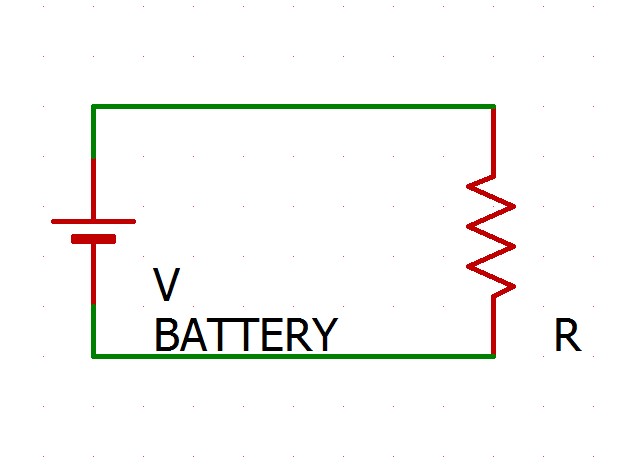
この回路の電源電圧、これを5Vとします。
この時の抵抗にかかる電圧は、電源電圧と同じになりますね。
そして今、この回路に50mAの電流を流したいとします。
この時、抵抗の値をいくつにしたら、ちゃんと回路に50mA の電流を流すことができるでしょうか?
Vは5V、Iは50mA=0.05A、Rは未定です。これをオームの法則の式に代入しますと、
V=I×R
∴5=0.05×R
∴0.05R=5
∴R=5/0.05
∴R=100Ωとなる訳です。
つまり100Ωの抵抗つなぐとちゃんと50mA流すことができる・・・と。
まぁこんな風に使う訳です。
また、この抵抗の値、つまり抵抗値は抵抗にある色のついた帯「カラーコード」で知ることができます。
このカラーコードの読み方はまた今度~♪
カラーコードの読み方はこちら
実際の抵抗値の導き方はこちら
(^・ω・)ノRadiumProduction in RoboCupJunior
その「素子」というものですが、素子というのは、電子回路を構成するうえでの最小のパーツのことを指します。
まぁつまり「はんだづけ」の作業でつける対象となるちっちゃいパーツのことですね。
全ての電子回路(つまりNXTやセンサー等も)全てこの素子によって作られています。
よくわからない人は、この際今はわからなくても大丈夫です。
これから暫くこのカテゴリーで紹介していくものは全部素子です。
という訳で今日は1回目。
最初に紹介する素子は・・・
「抵抗」です。
この名の通り、電流に対しての抵抗になります。つまり電流を流す量を制限するものです。
この「抵抗」というものですが、物理的で客観的な値として量記号と単位が存在して、
量記号はR、単位はΩとされています。
ここからは具体的な抵抗による電流の制限について、説明します。
単刀直入に式だけ説明しますと、
抵抗、そして電流と電圧の間にはこういった関係式が成り立ちます。
V=I×R
抵抗にかかる電圧は抵抗に流れる電流と抵抗をかけたもの、になる訳ですね。
この式をオームの法則といいます。
式はこれだけなのですが、どういうことかよくわからないかもしれません。実際の回路を使って説明しますね。
まず、こんな回路があったとします。
この回路の電源電圧、これを5Vとします。
この時の抵抗にかかる電圧は、電源電圧と同じになりますね。
そして今、この回路に50mAの電流を流したいとします。
この時、抵抗の値をいくつにしたら、ちゃんと回路に50mA の電流を流すことができるでしょうか?
Vは5V、Iは50mA=0.05A、Rは未定です。これをオームの法則の式に代入しますと、
V=I×R
∴5=0.05×R
∴0.05R=5
∴R=5/0.05
∴R=100Ωとなる訳です。
つまり100Ωの抵抗つなぐとちゃんと50mA流すことができる・・・と。
まぁこんな風に使う訳です。
また、この抵抗の値、つまり抵抗値は抵抗にある色のついた帯「カラーコード」で知ることができます。
このカラーコードの読み方はまた今度~♪
カラーコードの読み方はこちら
実際の抵抗値の導き方はこちら
(^・ω・)ノRadiumProduction in RoboCupJunior
PICの記事に向けて、Circuitカテゴリーの更新はどんどん進んでいきます。
今日は一番基礎の話。
アナログとかデジタルとかそういうのより前に来る話の筈なんですけどね。
何故か忘れてました。今日はそんなレベルのお話です。
なにについての話かというと、まぁ。タイトルの通りですね。電流、電圧、電力とりあえずこの3つのお話です。
何故これを話す必要があるかというと、今まで全て「電気」でここら辺の言葉は統一していたと思います。
でも電気にもいろいろな視点があってそれを全てわかってないと回路なんて作れません。
でも今までは統一して「電気」。これじゃなんのこっちゃわかりませんよね?
なので難しい話に入る前に、この電気のひとつの視点である電流、電圧、電力について紹介しておきます。
といっても普通であれば、小学校でこの辺はやっているはずなんですよね。いくらゆとり教育だろうとも。
でも確認っぽいなにかという意味もを含めて一応紹介します。
まず、電池があるとします。
今までの表記だと、「この電池は電気を流すことができる。」と書くところですね。
でも正しく書くと「この電池は電流を流すことができる。」となります。
本当は「電流が流れている」は「流れる」という意味が2重にかかってしまっているので間違い。
正しくは「電流を通すことができる。」になるのですが、
「電流が流れている」で造語みたくなっているのでこれで通します。
電流というのはその名の通り、実際の電気の流れのことです。
当たり前に様な気もしますが、この電気の流れている量で電池の強さが変わります。
一般的には電流のことをI(アイ)と表記します。こういう風に単語を記号に置き換えることはよくあります。
この時の置き換えられた記号のことをよく、量記号といいます。
この量記号という言葉はブログでも度々でて来るかと思います。他でもよく聞くので覚えていて損はないかも。
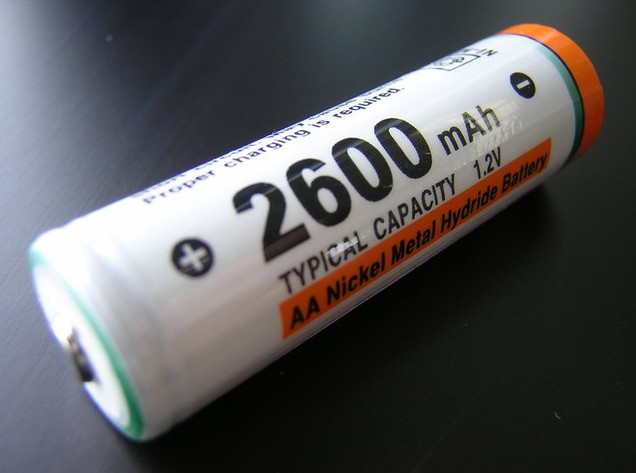
電流の単位はA(アンペア)です。前にmがつくとmA(ミリアンペア)となってAの千分の1の電流量を表します。
基本的電子回路にはmAしか登場しない気がするので計算するときには気を付けてください。
上の電池には大きく、2600mAh と書かれていますね。hというのは1時間という意味で、
要するにこの電池は1時間で2600mA流し続けることができるということを表しています。
因みに電流の流れというのは電子の流れと逆、つまり正孔の流れと一緒なので・・・
なんて話をしようと思ったけど難しいのでやめにして、記事を書き直したら1時間かかってしまいました(笑)
次は電圧についてです。
電圧というのはこれも名前の通り、電気の圧力。つまり電流を流す為の勢い、圧力の大きさを示すものです。
電流と同じようにこれも、電池の強弱に関わってくるものです。
量記号はV、電源の電圧についてはEで表記されることが多いみたいです。単位はV(ボルト)です。
上の写真では1.2Vと書かれていますね。この辺は説明しなくても大丈夫ですよね?
最後に電力。量記号はPで単位はW(ワット)です。
定義は「単位時間あたりに電流がする仕事量」 となりますが。めいいどくさいので
簡単に。
電力とはI×Vです。つまり電流と電圧をかけた値です。
直接回路を作るときに考えることではない気もしますが、これが素子の定格になってくる場合が多いので
やっぱりこれについても知っておく必要がありますね。
でもI×Vがわかってれば大丈夫でしょう。
とりあえず今日はこの辺で終わりにしておきます。
結構走り書きなので、変なところがある気もしますが、その辺は見つけ次第修正していきます(酷く乱暴な・・・)
(^・ω・)ノRadiumProduction in RoboCupJunior
今日は一番基礎の話。
アナログとかデジタルとかそういうのより前に来る話の筈なんですけどね。
何故か忘れてました。今日はそんなレベルのお話です。
なにについての話かというと、まぁ。タイトルの通りですね。電流、電圧、電力とりあえずこの3つのお話です。
何故これを話す必要があるかというと、今まで全て「電気」でここら辺の言葉は統一していたと思います。
でも電気にもいろいろな視点があってそれを全てわかってないと回路なんて作れません。
でも今までは統一して「電気」。これじゃなんのこっちゃわかりませんよね?
なので難しい話に入る前に、この電気のひとつの視点である電流、電圧、電力について紹介しておきます。
といっても普通であれば、小学校でこの辺はやっているはずなんですよね。いくらゆとり教育だろうとも。
でも確認っぽいなにかという意味もを含めて一応紹介します。
まず、電池があるとします。
今までの表記だと、「この電池は電気を流すことができる。」と書くところですね。
でも正しく書くと「この電池は電流を流すことができる。」となります。
本当は「電流が流れている」は「流れる」という意味が2重にかかってしまっているので間違い。
正しくは「電流を通すことができる。」になるのですが、
「電流が流れている」で造語みたくなっているのでこれで通します。
電流というのはその名の通り、実際の電気の流れのことです。
当たり前に様な気もしますが、この電気の流れている量で電池の強さが変わります。
一般的には電流のことをI(アイ)と表記します。こういう風に単語を記号に置き換えることはよくあります。
この時の置き換えられた記号のことをよく、量記号といいます。
この量記号という言葉はブログでも度々でて来るかと思います。他でもよく聞くので覚えていて損はないかも。
電流の単位はA(アンペア)です。前にmがつくとmA(ミリアンペア)となってAの千分の1の電流量を表します。
基本的電子回路にはmAしか登場しない気がするので計算するときには気を付けてください。
上の電池には大きく、2600mAh と書かれていますね。hというのは1時間という意味で、
要するにこの電池は1時間で2600mA流し続けることができるということを表しています。
因みに電流の流れというのは電子の流れと逆、つまり正孔の流れと一緒なので・・・
なんて話をしようと思ったけど難しいのでやめにして、記事を書き直したら1時間かかってしまいました(笑)
次は電圧についてです。
電圧というのはこれも名前の通り、電気の圧力。つまり電流を流す為の勢い、圧力の大きさを示すものです。
電流と同じようにこれも、電池の強弱に関わってくるものです。
量記号はV、電源の電圧についてはEで表記されることが多いみたいです。単位はV(ボルト)です。
上の写真では1.2Vと書かれていますね。この辺は説明しなくても大丈夫ですよね?
最後に電力。量記号はPで単位はW(ワット)です。
定義は「単位時間あたりに電流がする仕事量」 となりますが。めいいどくさいので
簡単に。
電力とはI×Vです。つまり電流と電圧をかけた値です。
直接回路を作るときに考えることではない気もしますが、これが素子の定格になってくる場合が多いので
やっぱりこれについても知っておく必要がありますね。
でもI×Vがわかってれば大丈夫でしょう。
とりあえず今日はこの辺で終わりにしておきます。
結構走り書きなので、変なところがある気もしますが、その辺は見つけ次第修正していきます(酷く乱暴な・・・)
(^・ω・)ノRadiumProduction in RoboCupJunior
前回、材料の説明を行ったので今回は工具、つまり作業するときに必要なものを紹介していきます。
只、工具は材料以上に人によってバラバラな面があるので、これはあくまで僕が使っている者の紹介ですよ。
と、釘を刺しておきます。他にこれが使いやすい!というのがありましたらコメントでもしてやってください。
まずははんだ付けをする際に絶対必要になるであろうものの紹介です。

はんだごてです。
はんだを溶かしたり、熱収縮チューブを収縮させたり、どう頑張っても切れないプラスチックを溶かし切ったり、
挙句の果てには分解して暖房にして冬を越してみたり。使い所は無限大です。
うちの部活では両手に持って、
いうこと聞かない奴に押し当ててびっくりさせたり、これで目を×××・・なんて脅したりします。
最近はしてないみたいですけど。あ。もちろんコンセントは抜けてますよ。
(注:冷えていてもこて先は尖っていて危ないので、良い子はマネしないでください。)
こんなはんだごてですが、どんなものを使ったらいいのでしょうか。とよく言われますが、
大体20~30Wくらいでいいんじゃないでしょうか。
上達してきて「溶けるのが遅くて嫌だ!」という場合には40Wでも構いません。 僕は40W です。
因みに鉛フリーを使う場合、20Wじゃ溶けないor恐ろしく時間がかかるので30W以上を推奨します。
会社は100均以外ならどこでも一緒だと思います。相当変なところでない限り・・・
あと使う際には耐熱スポンジとこて台をお忘れなく。ないと机か床を燃やしますよ♪
次にニッパー

ミニニッパーと呼ばれているような小さいやつがいいですね。
細い針金のような素子の足やメッキ線を切るのに使いますからね。
あとは黒焦げになったこて先を研ぐのにも使います。
次はラジオペンチ

先が曲がっているのはめっさ使いにくいです。あれはネジ回す時以外は邪魔なだけのような。。
よくメッキ線や素子の足を曲げるの使うとか説明する人がいますが、そんなことには使いません。
っていうかそんなの無理です。
とてもじゃありませんがラジオペンチじゃそんな狭いところには届きません。
はんだ付け前の線ならともかく、基板上の線をこれでいじるなんて不可能です。
素直にマイナスドライバ-を使いましょう。
じゃあ何に使うか。
①両方の手にラジオペンチを持って
②その両方でメッキ線を掴んで
③思いっきり引っ張る!
こうやって曲がったメッキ線を
まっすぐにするのに使います。

これだけで回路の作成効率が大幅にアップする(筈)です。
最後にホットボンドです。

グルーガンとかホットメルトとか呼ばれていることもありますが全部同一です。
はんだごてほどではありませんが熱いので使用する際は気を付けましょう。
簡単に言うとはんだごての電気が流れなくてどこにでもつくバージョンみたいなものでしょうか。
要するに熱で溶けるボンドです。
回路上で絶縁したり、コード線をはんだで付けた時の補強や、コネクタの補強とかに使います。
はんだより融解温度が低いのでこれを使ってはんだが解けるということはまずないと思います。
あと、綺麗にはがすことができるのでLEGOブロックの補強にもばっちり!
だってことは言わないでおきましょう。だって見栄え悪くなるもん。
意外とくっつくときはくっつくので頼りになります。
ロボコンの時の鍵を作る際にも針金の部分で大活躍をしました。
まったく関係ないところが折れたけど(笑)

因みにボンドの方はこんな感じです。

それでは今日はこの辺で。
なんか使う工具・・・忘れてる気がする・・・
材料編→
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s
そういえばドライバーとか忘れてましたね。小っちゃくて金属のやつが便利ですよ。溶けないから♪
只、工具は材料以上に人によってバラバラな面があるので、これはあくまで僕が使っている者の紹介ですよ。
と、釘を刺しておきます。他にこれが使いやすい!というのがありましたらコメントでもしてやってください。
まずははんだ付けをする際に絶対必要になるであろうものの紹介です。
はんだごてです。
はんだを溶かしたり、熱収縮チューブを収縮させたり、どう頑張っても切れないプラスチックを溶かし切ったり、
挙句の果てには分解して暖房にして冬を越してみたり。使い所は無限大です。
うちの部活では両手に持って、
いうこと聞かない奴に押し当ててびっくりさせたり、これで目を×××・・なんて脅したりします。
最近はしてないみたいですけど。あ。もちろんコンセントは抜けてますよ。
(注:冷えていてもこて先は尖っていて危ないので、良い子はマネしないでください。)
こんなはんだごてですが、どんなものを使ったらいいのでしょうか。とよく言われますが、
大体20~30Wくらいでいいんじゃないでしょうか。
上達してきて「溶けるのが遅くて嫌だ!」という場合には40Wでも構いません。 僕は40W です。
因みに鉛フリーを使う場合、20Wじゃ溶けないor恐ろしく時間がかかるので30W以上を推奨します。
会社は100均以外ならどこでも一緒だと思います。相当変なところでない限り・・・
あと使う際には耐熱スポンジとこて台をお忘れなく。ないと机か床を燃やしますよ♪
次にニッパー
ミニニッパーと呼ばれているような小さいやつがいいですね。
細い針金のような素子の足やメッキ線を切るのに使いますからね。
あとは黒焦げになったこて先を研ぐのにも使います。
次はラジオペンチ
先が曲がっているのはめっさ使いにくいです。あれはネジ回す時以外は邪魔なだけのような。。
よくメッキ線や素子の足を曲げるの使うとか説明する人がいますが、そんなことには使いません。
っていうかそんなの無理です。
とてもじゃありませんがラジオペンチじゃそんな狭いところには届きません。
はんだ付け前の線ならともかく、基板上の線をこれでいじるなんて不可能です。
素直にマイナスドライバ-を使いましょう。
じゃあ何に使うか。
①両方の手にラジオペンチを持って
②その両方でメッキ線を掴んで
③思いっきり引っ張る!
こうやって曲がったメッキ線を
まっすぐにするのに使います。
これだけで回路の作成効率が大幅にアップする(筈)です。
最後にホットボンドです。
グルーガンとかホットメルトとか呼ばれていることもありますが全部同一です。
はんだごてほどではありませんが熱いので使用する際は気を付けましょう。
簡単に言うとはんだごての電気が流れなくてどこにでもつくバージョンみたいなものでしょうか。
要するに熱で溶けるボンドです。
回路上で絶縁したり、コード線をはんだで付けた時の補強や、コネクタの補強とかに使います。
はんだより融解温度が低いのでこれを使ってはんだが解けるということはまずないと思います。
あと、綺麗にはがすことができるのでLEGOブロックの補強にもばっちり!
だってことは言わないでおきましょう。だって見栄え悪くなるもん。
意外とくっつくときはくっつくので頼りになります。
ロボコンの時の鍵を作る際にも針金の部分で大活躍をしました。
まったく関係ないところが折れたけど(笑)
因みにボンドの方はこんな感じです。
それでは今日はこの辺で。
なんか使う工具・・・忘れてる気がする・・・
材料編→
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s
そういえばドライバーとか忘れてましたね。小っちゃくて金属のやつが便利ですよ。溶けないから♪
自作センサー程度の作成だったら回路は必要ないかもしれませんが、PICと通信させたり、
センサー増設基盤をつくったりするには、やっぱり回路の知識。必要ですよね。
ということでCircuitカテゴリーではこういったロボカップで使える回路知識(?)
みたいなことについて記載していこうと思います。
前回、アナログとデジタルの話をして、
アナログのセンサーは全てデジタルに変換して扱わなくてはならないということがわかって頂けたと思います。
それでアナログをデジタルに変換することをA/D変換といって
これをする機械をA/Dコンバーターといいいます。
でも、これは実はNXT内部についてたりしているので
アナログの自作センサーをつける程度のことしかしないのであれば、考えなくていい内容ですね。
PICとかAVRとかする際は少し気にした方がいいかも。でも基本的に内蔵されています。
という話があったかと思います。
それで今回なのですが、タイトルの通り、回路制作にあたって必要なもの、特に消耗品について紹介します。
それではまず最初は・・・
半田

鈴とか、鉛とか、銅とか、銀とかで作られています。ものによってこれの比率が違います。銀半田超高いです。
ものによりますが、大体200~400℃くらいで溶けるようにできていて、
云わば「電気を通す接着剤」といったところでしょうか。
まぁ説明するまでもなく殆どの方がこれがなんなのかはわかるでしょうけど。
最近では鉛が有毒なので、鉛のはいっていない鉛フリーはんだというものが一般的なようです。
ちなみにうちの部活は鉛バンバン入っています。寿命縮むね。
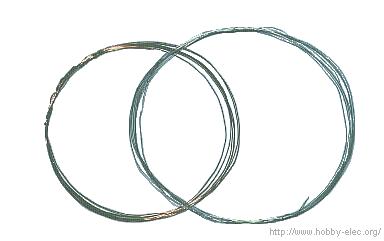
次にスズメッキ線です。

これはユニバーサル基盤で回路を作る上では半田と同じくらい重要です。
何に使うかというと、半田とセットで素子の足と足をつなぐことに主に使われます。
はんだが接着剤ならメッキ線は電気の通る回路のフレームとでもいいましょうか。
次にユニバーサル基盤です。
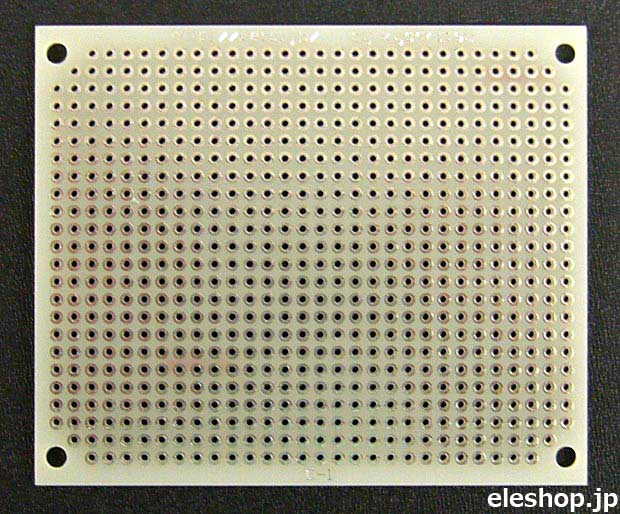
先ほどからちょくちょく出てきている意味不明な単語の正体はこれです。
基本的に2.54㎜の間隔(ピッチ)で穴があいています。
銅箔のある方、つまり写真の方が裏で、銅箔がない方が表です。
これに表から素子の足(線のこと)を指して裏で銅箔と、はんだづけしてメッキ線でつなぐ・・・と
回路の基本はこんな感じです。
あとはリード線とかも使ったりします。

あとは回路に搭載する素子ですが・・・
これはひとつずつ説明の必要があるのでまた今度ということでー。
ではこのへんでー。
工具編→
(^・ω・)ノRadiumProduction in RoboCupJunior
センサー増設基盤をつくったりするには、やっぱり回路の知識。必要ですよね。
ということでCircuitカテゴリーではこういったロボカップで使える回路知識(?)
みたいなことについて記載していこうと思います。
前回、アナログとデジタルの話をして、
アナログのセンサーは全てデジタルに変換して扱わなくてはならないということがわかって頂けたと思います。
それでアナログをデジタルに変換することをA/D変換といって
これをする機械をA/Dコンバーターといいいます。
でも、これは実はNXT内部についてたりしているので
アナログの自作センサーをつける程度のことしかしないのであれば、考えなくていい内容ですね。
PICとかAVRとかする際は少し気にした方がいいかも。でも基本的に内蔵されています。
という話があったかと思います。
それで今回なのですが、タイトルの通り、回路制作にあたって必要なもの、特に消耗品について紹介します。
それではまず最初は・・・
半田
鈴とか、鉛とか、銅とか、銀とかで作られています。ものによってこれの比率が違います。銀半田超高いです。
ものによりますが、大体200~400℃くらいで溶けるようにできていて、
云わば「電気を通す接着剤」といったところでしょうか。
まぁ説明するまでもなく殆どの方がこれがなんなのかはわかるでしょうけど。
最近では鉛が有毒なので、鉛のはいっていない鉛フリーはんだというものが一般的なようです。
ちなみにうちの部活は鉛バンバン入っています。寿命縮むね。
次にスズメッキ線です。
これはユニバーサル基盤で回路を作る上では半田と同じくらい重要です。
何に使うかというと、半田とセットで素子の足と足をつなぐことに主に使われます。
はんだが接着剤ならメッキ線は電気の通る回路のフレームとでもいいましょうか。
次にユニバーサル基盤です。
先ほどからちょくちょく出てきている意味不明な単語の正体はこれです。
基本的に2.54㎜の間隔(ピッチ)で穴があいています。
銅箔のある方、つまり写真の方が裏で、銅箔がない方が表です。
これに表から素子の足(線のこと)を指して裏で銅箔と、はんだづけしてメッキ線でつなぐ・・・と
回路の基本はこんな感じです。
あとはリード線とかも使ったりします。
あとは回路に搭載する素子ですが・・・
これはひとつずつ説明の必要があるのでまた今度ということでー。
ではこのへんでー。
工具編→
(^・ω・)ノRadiumProduction in RoboCupJunior
そろそろ、本格的に回路の話をしていこうかなと考えています。
まずは基本的な、「アナログ」と「デジタル」についてです。
アナログ、デジタル、このブログでももう何度も登場している単語ですね。
何度も登場しているので、これが結構常識的な話であることはわかって頂けると思います。
それで、2つの意味ですが
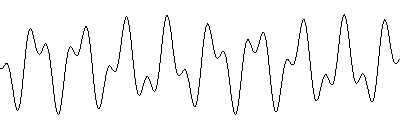
アナログはこれ
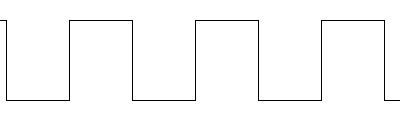
デジタルはこれ
になります。
つまり、アナログは曲線。デジタルは直線。ということになります。
まぁこれだけじゃなんのことかわかりませんよね。
まず、アナログというのは、大きさ、とか強さ、とか、量のあるものです。
たとえば、速度とか、重さとか、色の濃さとか、
これらは全て厳密には、他のものと比べることができません。
車の速度とかでも、2台の車があって、違う速度で走っていたら、
どちらがどれだけ速いか。なんてみただけじゃわかりませんよね。
速度メーターがあって、それに単位があって。初めてどっちがどれだけ速いかがわかるのです。
でもメーターの目盛りは、全ての数字に対して存在してはいませんよね。
例えばメータ-の60㎞と80㎞のメモリがあったらその間のメモリはせいぜい9個ぐらいしかないでしょう。
60と80の間は整数だけでも19個あるのに、足りませんよね。
つまり、車のメーターでは、正確な車の速度はわかりません。
つまり、正確な2台の速度の比較なんてできるはずがありませんよね。
でも人間って比較することが大好きなんです。なんとか2台の車の速度を比較しようと考えました。
その結果、ある概念が生み出されました。
それが有効数字、四捨五入という概念と
デジタルという概念です。
つまりデジタルというのは、アナログの値を比較するためのもの。なのです。
そしてその比較するときに使う数字をデジタル値といいます。
この場合、車のメーターの目盛りで比較する訳ですから、
デジタル値というのは車のメーターにある値のみを指します。
そして値の比較は、アナログ値を一番近いデジタル値に置き換えて行います。
つまり速度をメーターで見て、それで針の一番近くにあるメモリを読んで、
その値を車の速度として比較に使うわけですね。
要するに元の値がアナログで、その値を他と比較するときにはデジタルにする。と覚えておいてください。
因みに有効数字と四捨五入というのはアナログ値をデジタル値にするときに使う概念です。
引っ張っておいてなんですが、ここでは触れないので、深く知りたい際にはWeb検索を利用してください。
つまり比較に使われるのは全てデジタル。つまりこの世の物事は殆どデジタルで考えられているのです。
これはパソコンも同じ。特にパソコンは先ほどのメーターでいう目盛りが、0と1の2つしかありません。
これを2値デジタルといいます。
逆に速度計の目盛りとか、温度計の目盛りとか、メモリがたくさんあるものを多値デジタルといいます。
人間は基本的にこの多値デジタルで比較を行っていますね。
2値なんて使うのはPC等の電子の世界だけです。
まぁロボットはもちろん2値なわけだけど。
つまりロボットやろうと思ったらこの2値デジタルの勉強もしなくてはならないわけですね。
というわけで今日はこの辺で。
今日いいたかったことは
「0か1の二つなのがデジタルじゃない、目盛りそのものがデジタルだ」
ということです。
つまりライトセンサーはアナログセンサーだけど、
ロボットが処理するライトセンサーの値はデジタルだということ。です。
LEGOでロボットやってる人にありがちな勘違いですね。
それではー
(^・ω・)ノRadiumProduction in RoboCupJunior
まずは基本的な、「アナログ」と「デジタル」についてです。
アナログ、デジタル、このブログでももう何度も登場している単語ですね。
何度も登場しているので、これが結構常識的な話であることはわかって頂けると思います。
それで、2つの意味ですが
アナログはこれ
デジタルはこれ
になります。
つまり、アナログは曲線。デジタルは直線。ということになります。
まぁこれだけじゃなんのことかわかりませんよね。
まず、アナログというのは、大きさ、とか強さ、とか、量のあるものです。
たとえば、速度とか、重さとか、色の濃さとか、
これらは全て厳密には、他のものと比べることができません。
車の速度とかでも、2台の車があって、違う速度で走っていたら、
どちらがどれだけ速いか。なんてみただけじゃわかりませんよね。
速度メーターがあって、それに単位があって。初めてどっちがどれだけ速いかがわかるのです。
でもメーターの目盛りは、全ての数字に対して存在してはいませんよね。
例えばメータ-の60㎞と80㎞のメモリがあったらその間のメモリはせいぜい9個ぐらいしかないでしょう。
60と80の間は整数だけでも19個あるのに、足りませんよね。
つまり、車のメーターでは、正確な車の速度はわかりません。
つまり、正確な2台の速度の比較なんてできるはずがありませんよね。
でも人間って比較することが大好きなんです。なんとか2台の車の速度を比較しようと考えました。
その結果、ある概念が生み出されました。
それが有効数字、四捨五入という概念と
デジタルという概念です。
つまりデジタルというのは、アナログの値を比較するためのもの。なのです。
そしてその比較するときに使う数字をデジタル値といいます。
この場合、車のメーターの目盛りで比較する訳ですから、
デジタル値というのは車のメーターにある値のみを指します。
そして値の比較は、アナログ値を一番近いデジタル値に置き換えて行います。
つまり速度をメーターで見て、それで針の一番近くにあるメモリを読んで、
その値を車の速度として比較に使うわけですね。
要するに元の値がアナログで、その値を他と比較するときにはデジタルにする。と覚えておいてください。
因みに有効数字と四捨五入というのはアナログ値をデジタル値にするときに使う概念です。
引っ張っておいてなんですが、ここでは触れないので、深く知りたい際にはWeb検索を利用してください。
つまり比較に使われるのは全てデジタル。つまりこの世の物事は殆どデジタルで考えられているのです。
これはパソコンも同じ。特にパソコンは先ほどのメーターでいう目盛りが、0と1の2つしかありません。
これを2値デジタルといいます。
逆に速度計の目盛りとか、温度計の目盛りとか、メモリがたくさんあるものを多値デジタルといいます。
人間は基本的にこの多値デジタルで比較を行っていますね。
2値なんて使うのはPC等の電子の世界だけです。
まぁロボットはもちろん2値なわけだけど。
つまりロボットやろうと思ったらこの2値デジタルの勉強もしなくてはならないわけですね。
というわけで今日はこの辺で。
今日いいたかったことは
「0か1の二つなのがデジタルじゃない、目盛りそのものがデジタルだ」
ということです。
つまりライトセンサーはアナログセンサーだけど、
ロボットが処理するライトセンサーの値はデジタルだということ。です。
LEGOでロボットやってる人にありがちな勘違いですね。
それではー
(^・ω・)ノRadiumProduction in RoboCupJunior
書いた記事がその場で消えたので 無茶苦茶ブルーになってます。
また書き直しか・・・><。
昨夜、なんか頭いたいなー。と思って今朝病院に行ったら・・・
どうやらインフルだったようです。A型でした。
とりあえずリレンザ貰って帰りました。
それでさっき、書いた記事を確認してたら、
PWMについての説明がないことに気がついてしまいました。
あれじゃなんのこっちゃかわかりませんね・・・
という訳で今日の記事はPWMについてです。
前の記事を呼んでいただければ、
とりあえず「モーターに関係のあるもの」ということはわかっていただけると思います。
PWMというのは、簡単に言うと、一種のモーターの制御方式のことです。
正式にはPulse Width Modulationといって、
パルス派のデューティ比を変化させて変調をする変調方式のことを指します。
でもこっちの話をすると、ちょっと長くなるし、図とかも欲しくなってきちゃいます。
今ちょっとその余裕がないのでモーターの制御方式ということで話を進めようと思います。
まず、ある時間内でのモーターの回転量は何によって決まると思いますか?
電圧?電流?電力?
そのどれもが正解なんですが、ちゃんとした答えを言うと、「電力量」となります。
電力量というのは電力の大きさとその電力を与えている時間をかけたものです。
電力は電流×電圧なので、電力量、つまりモーターの回転量は電圧×電流×時間となります。
なのでモーターの回転量を変えるにはこの中のどれかを変化させてやればよい。ということになりますね。
しかし、電流や電圧を変えるというのは非常にめんどくさいんです。
これは電力の変化はアナログなのに対してロボットの制御はデジタルで行われているからなのですが。
これまた面倒なのでデジアナのことはまた今度ということで。
なので残っている「時間」、つまりモーターに電力を流す時間を変えることによって
モーターの回転量を変えることが簡単にできるようになります。
つまりは、モーターを回したり、とめたりを繰り返すということですね。これがPWM制御です。
でも只、回したり止めたりだと、モーターが回ったりとまったりを繰り返すだけですよね。
なのでPWMでは回したり、止めたりという動作に「高速に」という要素が追加されます。
高速に回したり、止めたりを繰りかえすことによって、
普通に回しているときよりも、一定時間での回転量が少なくなります。
これでモーターの回転量、つまりモーターの回転速度が擬似的に変えられることになります。
つまり、モーターの回転する速度そのものは変わらないけど、回転している時間を減らすことによって
結局進む距離を短くすることができる。これがPWM制御です。
こんな感じで大丈夫でしょうか。
とりあえず今日はこの辺で。
(^・ω・)ノRadiumProduction in RoboCupJunior
また書き直しか・・・><。
昨夜、なんか頭いたいなー。と思って今朝病院に行ったら・・・
どうやらインフルだったようです。A型でした。
とりあえずリレンザ貰って帰りました。
それでさっき、書いた記事を確認してたら、
PWMについての説明がないことに気がついてしまいました。
あれじゃなんのこっちゃかわかりませんね・・・
という訳で今日の記事はPWMについてです。
前の記事を呼んでいただければ、
とりあえず「モーターに関係のあるもの」ということはわかっていただけると思います。
PWMというのは、簡単に言うと、一種のモーターの制御方式のことです。
正式にはPulse Width Modulationといって、
パルス派のデューティ比を変化させて変調をする変調方式のことを指します。
でもこっちの話をすると、ちょっと長くなるし、図とかも欲しくなってきちゃいます。
今ちょっとその余裕がないのでモーターの制御方式ということで話を進めようと思います。
まず、ある時間内でのモーターの回転量は何によって決まると思いますか?
電圧?電流?電力?
そのどれもが正解なんですが、ちゃんとした答えを言うと、「電力量」となります。
電力量というのは電力の大きさとその電力を与えている時間をかけたものです。
電力は電流×電圧なので、電力量、つまりモーターの回転量は電圧×電流×時間となります。
なのでモーターの回転量を変えるにはこの中のどれかを変化させてやればよい。ということになりますね。
しかし、電流や電圧を変えるというのは非常にめんどくさいんです。
これは電力の変化はアナログなのに対してロボットの制御はデジタルで行われているからなのですが。
これまた面倒なのでデジアナのことはまた今度ということで。
なので残っている「時間」、つまりモーターに電力を流す時間を変えることによって
モーターの回転量を変えることが簡単にできるようになります。
つまりは、モーターを回したり、とめたりを繰り返すということですね。これがPWM制御です。
でも只、回したり止めたりだと、モーターが回ったりとまったりを繰り返すだけですよね。
なのでPWMでは回したり、止めたりという動作に「高速に」という要素が追加されます。
高速に回したり、止めたりを繰りかえすことによって、
普通に回しているときよりも、一定時間での回転量が少なくなります。
これでモーターの回転量、つまりモーターの回転速度が擬似的に変えられることになります。
つまり、モーターの回転する速度そのものは変わらないけど、回転している時間を減らすことによって
結局進む距離を短くすることができる。これがPWM制御です。
こんな感じで大丈夫でしょうか。
とりあえず今日はこの辺で。
(^・ω・)ノRadiumProduction in RoboCupJunior
はるかむかしの おはなしです。
LEGOブロックで つくられた ロボット。
センサーポートが たりなくなってしまった ロボット。
ロボットにのこされた さいごのせんたく。
かさねづけ と しゅうつりょくポート での PICとの つうしん。
このつうしんが ちいさなきせきを おこしました。
このおはなしは そんなちいさな ちいさな きせきのものがたり。
そのロボットがうんだ ”きせき” が たいかいのおわりに みたものは。
まぁ奇跡って程のブツでもありませんが。
冒頭の通り、センサーポートがたりなくなって、自作基盤とPICを使って、
センサー基盤を作ったことがあるんですね。
以前紹介した、背景のロボットのものなんですけど。
今日はその基盤についての記事になります。
この基盤、写真があればいいのですが、なぜかデータがない・・・
というわけで今日は文字だけの説明になります。
今度、写真と回路図載せてみますね。時間があればですが(笑)
まずこの基盤制御しているセンサーは、
アナログセンサーが、測距センサ-が2つ、緑センサーがひとつ、よって計3つ
デジタルセンサーは水銀センサーが2つ、3ビット方位センサーがひとつ、よって計3つ
合計は6個です。
方位センサーは3本信号線が必要なので、入力信号は全部で8本。
最初はPICなんて使う予定は全くなかったのですが、どんどんセンサーの数が増えていって、
流石にここまで信号が多いとロジックなんて組む気にならなかったので間にPICを挟む事にしました。
これで簡単に全てのセンサーの値を読むことができました。
次にPICとの相互通信ですが、
RCX側には赤外線通信機能しかありません。それも超のんびりな。
・・・となると、今余ってるポート2の重ねづけでのデジタル入力と、BポートのPWM出力。
これだけで通信をこなわなければなりませんでした。
RCXのポートが入出力固定で、しかもどちらも1つずつしかないので、もう同期通信はできません。
クロック信号を送ることができませんからね。(イヤ、今考えればできたかも。。。)
という訳で非同期通信を行うことにしました。
まず最初に一瞬だけ考えたのがBポートのPWM信号による通信です。
RCXのPWM比は8段階に変えられたのでそれでちょうどいいかなーとか思ったんですが、
RCXのPWMってアテにならないんですよねー(笑)
中のドライバICが残念なんでしょう。
オシロで測ったらなんか凄いことになってた記憶があります。
という訳で断念。その後も色々考えましたが最終的には擬似UARTを作成して乗り切りました。
RCXの信号がくるのをPICで待ってーきたら今のセンサーの値返してーみたいなことをやっていました。
結局、来た信号とRCXに繋がっているセンサーの値、プログラムの進行状態から
なんのセンサーの値が帰ってきているのかを判断するようなプログラムにした気がします。
一体なんてめちゃくちゃなもの作ってるんだか・・・
今度は回路のほうについて紹介します。
が。今日はここまでにしておきます。
また土日かそこらに更新しようかな。
(^・ω・)ノRadiumProduction in RoboCupJunior
LEGOブロックで つくられた ロボット。
センサーポートが たりなくなってしまった ロボット。
ロボットにのこされた さいごのせんたく。
かさねづけ と しゅうつりょくポート での PICとの つうしん。
このつうしんが ちいさなきせきを おこしました。
このおはなしは そんなちいさな ちいさな きせきのものがたり。
そのロボットがうんだ ”きせき” が たいかいのおわりに みたものは。
まぁ奇跡って程のブツでもありませんが。
冒頭の通り、センサーポートがたりなくなって、自作基盤とPICを使って、
センサー基盤を作ったことがあるんですね。
以前紹介した、背景のロボットのものなんですけど。
今日はその基盤についての記事になります。
この基盤、写真があればいいのですが、なぜかデータがない・・・
というわけで今日は文字だけの説明になります。
今度、写真と回路図載せてみますね。時間があればですが(笑)
まずこの基盤制御しているセンサーは、
アナログセンサーが、測距センサ-が2つ、緑センサーがひとつ、よって計3つ
デジタルセンサーは水銀センサーが2つ、3ビット方位センサーがひとつ、よって計3つ
合計は6個です。
方位センサーは3本信号線が必要なので、入力信号は全部で8本。
最初はPICなんて使う予定は全くなかったのですが、どんどんセンサーの数が増えていって、
流石にここまで信号が多いとロジックなんて組む気にならなかったので間にPICを挟む事にしました。
これで簡単に全てのセンサーの値を読むことができました。
次にPICとの相互通信ですが、
RCX側には赤外線通信機能しかありません。それも超のんびりな。
・・・となると、今余ってるポート2の重ねづけでのデジタル入力と、BポートのPWM出力。
これだけで通信をこなわなければなりませんでした。
RCXのポートが入出力固定で、しかもどちらも1つずつしかないので、もう同期通信はできません。
クロック信号を送ることができませんからね。(イヤ、今考えればできたかも。。。)
という訳で非同期通信を行うことにしました。
まず最初に一瞬だけ考えたのがBポートのPWM信号による通信です。
RCXのPWM比は8段階に変えられたのでそれでちょうどいいかなーとか思ったんですが、
RCXのPWMってアテにならないんですよねー(笑)
中のドライバICが残念なんでしょう。
オシロで測ったらなんか凄いことになってた記憶があります。
という訳で断念。その後も色々考えましたが最終的には擬似UARTを作成して乗り切りました。
RCXの信号がくるのをPICで待ってーきたら今のセンサーの値返してーみたいなことをやっていました。
結局、来た信号とRCXに繋がっているセンサーの値、プログラムの進行状態から
なんのセンサーの値が帰ってきているのかを判断するようなプログラムにした気がします。
一体なんてめちゃくちゃなもの作ってるんだか・・・
今度は回路のほうについて紹介します。
が。今日はここまでにしておきます。
また土日かそこらに更新しようかな。
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ