RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
今日は モータードライバの回路図の修正までできればいいかなぁ。
とりあえず高専祭の書類をかけるところまで書いてしまってから制作にはいろうと思います。
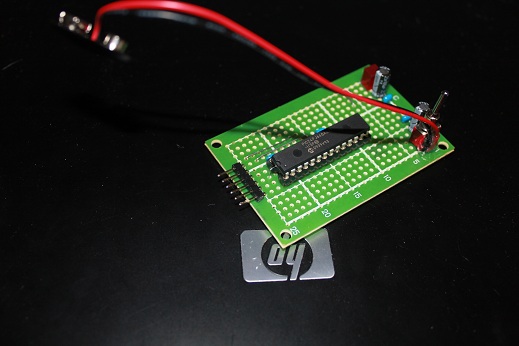
実は以前にMDは試作機を作成したのですが、FETを使ったら、なんか値段的な意味で気持ち悪い出来になったので
ちょっと値段を下げたものを作ってみよう・・・と思った次第です。
だってこれロボコンのロボット動かせるぞ・・・(笑)
という訳で、安くする手段その1。
リレーを使う。

高いっちゃ高いですがそこらのFETよりは安いですからね。
しかもHブリッジ回路めちゃくちゃ簡単だし。
安くする手段その2
ロジックなんて組まない。
ちょっとサージ怖いんで遅延させるのにAND使っていますが、それ以外は使っていません。
これでむっちゃ安くなります。
安くする手段その3
PWMを捨てる。
FET一個の差ですけど、大きいんです。これが。
という訳でリレーを使ったのはいいのですが、
ロジックの回路とリレーの回路をフォトカプラで分けたら、なんと動かない。
おかしい、家で普通のリレー使ってやったときは動いたのに・・・
その原因はパワーリレーの内部抵抗にありました。
家にあったリレーはだいたい500Ωくらいあったのですが、パワーリレーはあって50Ωそこら。
まぁどういうことが起きるかといいますと、電圧降下カプラさんに集中しますよね。
=リレーに電圧来ない→動かない。
といった感じです。
という訳で回路の変更を余儀なくされました。
といってもカプラさんとリレーの間にTrを一個挟むだけなのですけど・・・
簡単な問題でよかった。という訳で明後日当たりに回路を作り直そうと思います。
と言う訳で殴り書きですが、以上で終了です。
これから講習見に行ってそのあとでMAC部屋行って工事士の講習会です(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
とりあえず高専祭の書類をかけるところまで書いてしまってから制作にはいろうと思います。
実は以前にMDは試作機を作成したのですが、FETを使ったら、なんか値段的な意味で気持ち悪い出来になったので
ちょっと値段を下げたものを作ってみよう・・・と思った次第です。
だってこれロボコンのロボット動かせるぞ・・・(笑)
という訳で、安くする手段その1。
リレーを使う。
高いっちゃ高いですがそこらのFETよりは安いですからね。
しかもHブリッジ回路めちゃくちゃ簡単だし。
安くする手段その2
ロジックなんて組まない。
ちょっとサージ怖いんで遅延させるのにAND使っていますが、それ以外は使っていません。
これでむっちゃ安くなります。
安くする手段その3
PWMを捨てる。
FET一個の差ですけど、大きいんです。これが。
という訳でリレーを使ったのはいいのですが、
ロジックの回路とリレーの回路をフォトカプラで分けたら、なんと動かない。
おかしい、家で普通のリレー使ってやったときは動いたのに・・・
その原因はパワーリレーの内部抵抗にありました。
家にあったリレーはだいたい500Ωくらいあったのですが、パワーリレーはあって50Ωそこら。
まぁどういうことが起きるかといいますと、電圧降下カプラさんに集中しますよね。
=リレーに電圧来ない→動かない。
といった感じです。
という訳で回路の変更を余儀なくされました。
といってもカプラさんとリレーの間にTrを一個挟むだけなのですけど・・・
簡単な問題でよかった。という訳で明後日当たりに回路を作り直そうと思います。
と言う訳で殴り書きですが、以上で終了です。
これから講習見に行ってそのあとでMAC部屋行って工事士の講習会です(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
今日の部活動はそんな感じ。
もう殆ど講習会は副部長が行っています。
そろそろ部長も交代かな・・・(笑)
僕の方は高専祭用の提出書類を書くつもりが、
電通の部長にPCとられて麻雀やられてしまったので全くかけず、ぶっちゃけ何もしていませんでした(笑)
この部活は部長が仕事をしないのが通例なのでしょうか?
という訳で、もう諦めた僕は、6時ごろ講習会に参加して、一応の変数の説明をして、今日の講習会を終わらせました。
”さんすう”って難しいよね。
まぁ今週はこのような形で適当に終わらせましたが、来週からは条件文の説明になります。
ちょっと掴みがわからないと難しい部分もあるので来週はちゃんと教えよう。うん。
という訳で来週は、僕が初めて真面目な講習会を行うのでよろしくお願いします。
まぁ今日の講習の内容は、以前に書いた記事の方が詳しかったりもしますので省略で・・・
それではまた。
(^・ω・)ノRadiumProduction in RoboCupJunior
もう殆ど講習会は副部長が行っています。
そろそろ部長も交代かな・・・(笑)
僕の方は高専祭用の提出書類を書くつもりが、
電通の部長にPCとられて麻雀やられてしまったので全くかけず、ぶっちゃけ何もしていませんでした(笑)
この部活は部長が仕事をしないのが通例なのでしょうか?
という訳で、もう諦めた僕は、6時ごろ講習会に参加して、一応の変数の説明をして、今日の講習会を終わらせました。
”さんすう”って難しいよね。
まぁ今週はこのような形で適当に終わらせましたが、来週からは条件文の説明になります。
ちょっと掴みがわからないと難しい部分もあるので来週はちゃんと教えよう。うん。
という訳で来週は、僕が初めて真面目な講習会を行うのでよろしくお願いします。
まぁ今日の講習の内容は、以前に書いた記事の方が詳しかったりもしますので省略で・・・
それではまた。
(^・ω・)ノRadiumProduction in RoboCupJunior
その名も6m AND downというそうです。
深夜9時から 昼12時までの時間で開催されて、
おおまかにいうと、無線機を使って参加者同士で交信を行って、
その交信数と、交信できた都道府県の数で得点を算出してそれで勝敗が決まる競技です。
うちの部活ではこのような無線機を使用していたりしています。

因みにうちの電気通信部の毎年の大体のスコアは1000~2000ぐらいだそうです。
これが入賞圏だと10万とか30万とかになるんだとか。
学校部門だけでも(大学以下全て)入賞は1万とか3万とかだそうで、
はっきり言って何をどうすれば勝てるとか、そういう次元の話ではありませんね。
こりゃ勝敗に拘っていないもの頷けますね。だって優勝クラスだと一時間で約2千交信。
ってことは2秒に1回ほど交信をしているということですよ。どうなってるの・・・?
それに対してうちは1時間全く交信がなかったりということもあるみたいです。
これはロボコンより状況が酷いですね・・・。というより、上がおかしすぎます(笑)
平均得点はどうなってるんだろう。
まぁ大体の原因はうちが50MHz帯しかつかえないからなんでしょうけどね。そういうことにしておきたいです。
という訳で始まった今年のコンテストですが、夜からの開催なので集合は夕方。
でも、まず僕は一人先に登校して、朝から電気工事士の講習です。
やっぱりこの時間は暇だから、でない理由はないので出ていました。
といっても先生の話だと、もうほとんど問題はないんだとか。うーん出る意味あるかなぁ(笑)
今日の講習は昼まで、部の集合は15:00なので3時間ほどあっちこっちで時間をつぶします。
それにしても、なんで高専生は土曜日は図書館使えないのでしょう?熱中症で死ぬかと思った。
まぁそんな感じで講習に参加した後で時間を調整して部室に行きます。
そこからがカオスの始まり。
まずは初めて会う4年の先輩方に挨拶して(入部したばかりだからね)、その後顧問の先生を待ちます。
待ちます。待ちます・・・
こないっ!
9時から開始なのに、準備があるから3時にこいうということだったのに、なんということでしょう。
なにひとつ準備らしいことはしませんでした。まさかのここで+6時間待ちぼうけです。
という訳でしばしレポート+回路で遊ぼうTimeです。
そして8時半ごろになってようやく先生登場。3時間半遅れですね。そして・・・
5分話して終了。また研究室に戻って行ってしまいました。なんだったんだ・・・一体・・・
そんなこんなで再び遊ぼうTimeです。ですが・・・
「部長!9時過ぎてる!」
部長「あ。」
まさかの出遅れです。すぐに準備しないと・・・!
”ポチッ。”
部長「準備完了!」
「無線機の電源つけるだけかよっ!」
この1秒の為に僕たちは大会開始時刻の6時間も前に集合したというのです。
部長がいうには「これぞ電通クオリティ。」
そして大会は始まりました。みんなまだ集中力があるので、競技開始後すぐはまさにカオスです。
どこに行っても人がいる。書入れ時ってやつだそうです。
そいつを15分逃してのスタートですから、これはもう流石としか言えないです。
交信ですから、相手の言っていることをまず聞き取らないとなのですが、無線機を使うのには勿論免許がいるのです。
僕は当然そんなもんありませんから、無線機からのまともな声を聴くのは初めて。
当然、なんていっているかわからないんです(笑)アレ日本語?
大体1時間ぐらいはなんて言っているかわかりませんでしたね。
それでさらに1時間、時刻は23:00を回ったころでしょうか。
まぁとりあえずアレを日本語として聞き取れるぐらいにまで耳が慣れたところで交代になりました。
このコンテストは長期戦なので、交代制で交信したり、休んだりをしていました。
勿論僕は免許ないので、交信はできず、とりあえず聞き取りだけをして過ごしていました。
それで交代してから事態は急変。
何故か交代していったはずの部員たちが、ぞろぞろぞろぞろと部員が休憩の部屋にやってきます。
え?交代制は?早くも交代制終了のお知らせです。
免許のある部員一人を残して全員が休憩にはいってしまいました。
そしてそのまま2時間経過。
今度は向こうで頑張っていた一人が休憩にはいって、それ以外全員が部室になだれ込みました。
そしてわいわい一時間、どう考えても一人の方可哀想だろ・・・と思うぐらいわいわいしていました。
そして時間は午前3時、(50MHz帯には)全然人がいなくなったのでいったん全員休憩に入りました。
休憩とは体を休めること。こんなことは幼稚園児でも知っています。
でも残念ながら、高専生は休憩という言葉の意味を知らなかったのです・・・!
それから2時間半、一人だった子も含めて全員で何故かローカルルール知ってるだけ全部アリの大富豪をやりました。
ひぐらしとマドマギ見ながら(笑)
まぁ夏の夜だし、無線機もザーザー言っていて雰囲気出ているので・・・ということです。
大貧民に天和されて都落ちした時は正直何が起きたのかわかりませんでしたが・・・(苦笑)
此方も2革命+Jocer+8が2枚に10とQだったから地和できたのに・・・
あの時4あげてなかったらなぁ・・・
とまぁこんな感じで、麻雀やUNOが混ざった不思議な大富豪でしたね。
そして5時半頃になって人も帰ってき始めたので再び大会業務に戻ります。
そしてレポートやって、そのまま朝になって、全員死んだので午前8:30、まだ時間はありますが、
競技終了ということにしました。
全員死んだ理由としては、一年生の指導という理由もあって、交代のローテンションが組めなかったこと、
休憩というムツカシイ日本語が誰も理解できなかったこと、です。確か結果は1110点だったかな。
それでその後、みんなで屋上にある電通のアンテナを見に行きました。

ちょうど西等の8階、いつもRCJが活動しているところの真上らへんでしょうか。
でっかいのが立っていました。
設置だけで10ウン万かかったんだとか、大変なものですよ。
因みに梯子でアンテナの付け根ぐらいまで上ることができて、今日は部長と一年が元気(?)に上っていました。
まぁこんな感じでコンテストは終了、顧問の先生の「家に着くまでがコンテストですよ!」の名言を最後に解散しました。
でも重要なことを忘れていませんか?僕たちはそう、徹夜明けのテンションだということを・・・!
とりあえず、そのまま部長と二人で秋葉に直りました。これで3週連続の秋葉です。
といっても、不思議なことに、秋月と千石とマルツと特に鈴商だけしかいっていないような・・・
今日は全然歩いてないです。でもこの暑さじゃちょっときついですね・・・
でも徹夜明けのテンションがそんなのに負けるわけがない。何とか気合で秋月で買うものを買って、
部長と鈴商でIC探して引き出しを片っ端から開けまわったり、
回路計算で6+6+4=14という計算結果を叩き出しつつ、実はその式は6+4で、正解は10という暴挙をやらかしたり、
とにかく暴走していました。良く家に帰れたなぁ・・・
という訳で今日の収穫です。

因みに電通部は年3階コンテストに参加していて、今年はまだ後一回あるそうです。
まぁRCJと被ってなければまたでてみようかなぁ。
それでは。
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s完璧だったつもりが秋葉で大量に買い忘れしてたーっ!!
道理で秋月の袋が思ったより軽い訳だ・・・。
深夜9時から 昼12時までの時間で開催されて、
おおまかにいうと、無線機を使って参加者同士で交信を行って、
その交信数と、交信できた都道府県の数で得点を算出してそれで勝敗が決まる競技です。
うちの部活ではこのような無線機を使用していたりしています。
因みにうちの電気通信部の毎年の大体のスコアは1000~2000ぐらいだそうです。
これが入賞圏だと10万とか30万とかになるんだとか。
学校部門だけでも(大学以下全て)入賞は1万とか3万とかだそうで、
はっきり言って何をどうすれば勝てるとか、そういう次元の話ではありませんね。
こりゃ勝敗に拘っていないもの頷けますね。だって優勝クラスだと一時間で約2千交信。
ってことは2秒に1回ほど交信をしているということですよ。どうなってるの・・・?
それに対してうちは1時間全く交信がなかったりということもあるみたいです。
これはロボコンより状況が酷いですね・・・。というより、上がおかしすぎます(笑)
平均得点はどうなってるんだろう。
まぁ大体の原因はうちが50MHz帯しかつかえないからなんでしょうけどね。そういうことにしておきたいです。
という訳で始まった今年のコンテストですが、夜からの開催なので集合は夕方。
でも、まず僕は一人先に登校して、朝から電気工事士の講習です。
やっぱりこの時間は暇だから、でない理由はないので出ていました。
といっても先生の話だと、もうほとんど問題はないんだとか。うーん出る意味あるかなぁ(笑)
今日の講習は昼まで、部の集合は15:00なので3時間ほどあっちこっちで時間をつぶします。
それにしても、なんで高専生は土曜日は図書館使えないのでしょう?熱中症で死ぬかと思った。
まぁそんな感じで講習に参加した後で時間を調整して部室に行きます。
そこからがカオスの始まり。
まずは初めて会う4年の先輩方に挨拶して(入部したばかりだからね)、その後顧問の先生を待ちます。
待ちます。待ちます・・・
こないっ!
9時から開始なのに、準備があるから3時にこいうということだったのに、なんということでしょう。
なにひとつ準備らしいことはしませんでした。まさかのここで+6時間待ちぼうけです。
という訳でしばしレポート+回路で遊ぼうTimeです。
そして8時半ごろになってようやく先生登場。3時間半遅れですね。そして・・・
5分話して終了。また研究室に戻って行ってしまいました。なんだったんだ・・・一体・・・
そんなこんなで再び遊ぼうTimeです。ですが・・・
「部長!9時過ぎてる!」
部長「あ。」
まさかの出遅れです。すぐに準備しないと・・・!
”ポチッ。”
部長「準備完了!」
「無線機の電源つけるだけかよっ!」
この1秒の為に僕たちは大会開始時刻の6時間も前に集合したというのです。
部長がいうには「これぞ電通クオリティ。」
そして大会は始まりました。みんなまだ集中力があるので、競技開始後すぐはまさにカオスです。
どこに行っても人がいる。書入れ時ってやつだそうです。
そいつを15分逃してのスタートですから、これはもう流石としか言えないです。
交信ですから、相手の言っていることをまず聞き取らないとなのですが、無線機を使うのには勿論免許がいるのです。
僕は当然そんなもんありませんから、無線機からのまともな声を聴くのは初めて。
当然、なんていっているかわからないんです(笑)アレ日本語?
大体1時間ぐらいはなんて言っているかわかりませんでしたね。
それでさらに1時間、時刻は23:00を回ったころでしょうか。
まぁとりあえずアレを日本語として聞き取れるぐらいにまで耳が慣れたところで交代になりました。
このコンテストは長期戦なので、交代制で交信したり、休んだりをしていました。
勿論僕は免許ないので、交信はできず、とりあえず聞き取りだけをして過ごしていました。
それで交代してから事態は急変。
何故か交代していったはずの部員たちが、ぞろぞろぞろぞろと部員が休憩の部屋にやってきます。
え?交代制は?早くも交代制終了のお知らせです。
免許のある部員一人を残して全員が休憩にはいってしまいました。
そしてそのまま2時間経過。
今度は向こうで頑張っていた一人が休憩にはいって、それ以外全員が部室になだれ込みました。
そしてわいわい一時間、どう考えても一人の方可哀想だろ・・・と思うぐらいわいわいしていました。
そして時間は午前3時、(50MHz帯には)全然人がいなくなったのでいったん全員休憩に入りました。
休憩とは体を休めること。こんなことは幼稚園児でも知っています。
でも残念ながら、高専生は休憩という言葉の意味を知らなかったのです・・・!
それから2時間半、一人だった子も含めて全員で何故かローカルルール知ってるだけ全部アリの大富豪をやりました。
ひぐらしとマドマギ見ながら(笑)
まぁ夏の夜だし、無線機もザーザー言っていて雰囲気出ているので・・・ということです。
大貧民に天和されて都落ちした時は正直何が起きたのかわかりませんでしたが・・・(苦笑)
此方も2革命+Jocer+8が2枚に10とQだったから地和できたのに・・・
あの時4あげてなかったらなぁ・・・
とまぁこんな感じで、麻雀やUNOが混ざった不思議な大富豪でしたね。
そして5時半頃になって人も帰ってき始めたので再び大会業務に戻ります。
そしてレポートやって、そのまま朝になって、全員死んだので午前8:30、まだ時間はありますが、
競技終了ということにしました。
全員死んだ理由としては、一年生の指導という理由もあって、交代のローテンションが組めなかったこと、
休憩というムツカシイ日本語が誰も理解できなかったこと、です。確か結果は1110点だったかな。
それでその後、みんなで屋上にある電通のアンテナを見に行きました。
ちょうど西等の8階、いつもRCJが活動しているところの真上らへんでしょうか。
でっかいのが立っていました。
設置だけで10ウン万かかったんだとか、大変なものですよ。
因みに梯子でアンテナの付け根ぐらいまで上ることができて、今日は部長と一年が元気(?)に上っていました。
まぁこんな感じでコンテストは終了、顧問の先生の「家に着くまでがコンテストですよ!」の名言を最後に解散しました。
でも重要なことを忘れていませんか?僕たちはそう、徹夜明けのテンションだということを・・・!
とりあえず、そのまま部長と二人で秋葉に直りました。これで3週連続の秋葉です。
といっても、不思議なことに、秋月と千石とマルツと特に鈴商だけしかいっていないような・・・
今日は全然歩いてないです。でもこの暑さじゃちょっときついですね・・・
でも徹夜明けのテンションがそんなのに負けるわけがない。何とか気合で秋月で買うものを買って、
部長と鈴商でIC探して引き出しを片っ端から開けまわったり、
回路計算で6+6+4=14という計算結果を叩き出しつつ、実はその式は6+4で、正解は10という暴挙をやらかしたり、
とにかく暴走していました。良く家に帰れたなぁ・・・
という訳で今日の収穫です。
因みに電通部は年3階コンテストに参加していて、今年はまだ後一回あるそうです。
まぁRCJと被ってなければまたでてみようかなぁ。
それでは。
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s完璧だったつもりが秋葉で大量に買い忘れしてたーっ!!
道理で秋月の袋が思ったより軽い訳だ・・・。
HiTechnic社から最初に発売されたNXTのセンサー。そのなかで唯一まだ紹介していないものがあります。
それがこの、GyroSensorです。

ジャイロと言われると、なにが思い浮かびますかね。
例えばこれとか

これとか、
ではないでしょうか?
あとは普通にコマや自転車の回転もジャイロ効果とか呼ばれたりしますよね。
この「ジャイロ」ってなんでしょう?
この答えのヒントは今挙げたものの中にあります。
今まで例に出したモノたちの共通点はなんでしょう。
これはズバリ「回転」ですよね。正確には「自転」でしょうか。
まぁ要するに回転に関係のあるものなんですよね。
実はジャイロとはなにかといいますと、これは大体の場合で先ほど登場したジャイロ効果のことをいいます。
(チャリのブレーキ機構のことだったりもしますが・・・)
これはどういうものかといいますと、簡単に言ってみれば、
コマが回っていると倒れない、チャリをこいでいると転ばない現象のことです。
一般的に言うと、物体は高速で自転していればいるほど姿勢を乱されにくくなる現象。となりますかね。
ここで重要なのが回転速度、この回転速度が速いほど、姿勢を乱されにくくなるということは、
回転速度が速いほど、ジャイロ効果は大きくなるということです。
このジャイロ効果と回転速度の関係がわかったところで、センサーの話に戻ります。
このジャイロセンサーというものは、さきほど出てきたジャイロ効果の大きさを測定するセンサーです。
ということは何かというと、センサー自体の(あるいはセンサーの搭載されているロボットの)
回転測度を測定するセンサーなのです。
つまりこれも、ちょっと前に回転センサーで紹介した、角速度を測るセンサーなのですね。
まぁつまりいうと、このセンサーを使うと、ロボカップでの用途の場合、
回転角度を一定にして回転したり、方法によっては方位ではなく「方向」の検知などが行えます。
まぁ他にも傾きとかも検知出来ますけど・・・今の飛行機にはこのセンサーが搭載されています。
昔はでっかいジャイロスコープを中に乗っけてそれを回転させてジャイロ効果で姿勢を安定させていたらしいですが、
今はちゃんとした電子回路のセンサーで制御しています。
因みにヘリの場合、後ろについてるプロペラ(ロータ)がジャイロスコープの代わりなんだそうです。

という訳でジャイロセンサーの紹介でした。
因みに、これはANのセンサーで、秒間300回の読み取り性能を持っています。
それでは、また。
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCupJunior
それがこの、GyroSensorです。
ジャイロと言われると、なにが思い浮かびますかね。
例えばこれとか
これとか、
ではないでしょうか?
あとは普通にコマや自転車の回転もジャイロ効果とか呼ばれたりしますよね。
この「ジャイロ」ってなんでしょう?
この答えのヒントは今挙げたものの中にあります。
今まで例に出したモノたちの共通点はなんでしょう。
これはズバリ「回転」ですよね。正確には「自転」でしょうか。
まぁ要するに回転に関係のあるものなんですよね。
実はジャイロとはなにかといいますと、これは大体の場合で先ほど登場したジャイロ効果のことをいいます。
(チャリのブレーキ機構のことだったりもしますが・・・)
これはどういうものかといいますと、簡単に言ってみれば、
コマが回っていると倒れない、チャリをこいでいると転ばない現象のことです。
一般的に言うと、物体は高速で自転していればいるほど姿勢を乱されにくくなる現象。となりますかね。
ここで重要なのが回転速度、この回転速度が速いほど、姿勢を乱されにくくなるということは、
回転速度が速いほど、ジャイロ効果は大きくなるということです。
このジャイロ効果と回転速度の関係がわかったところで、センサーの話に戻ります。
このジャイロセンサーというものは、さきほど出てきたジャイロ効果の大きさを測定するセンサーです。
ということは何かというと、センサー自体の(あるいはセンサーの搭載されているロボットの)
回転測度を測定するセンサーなのです。
つまりこれも、ちょっと前に回転センサーで紹介した、角速度を測るセンサーなのですね。
まぁつまりいうと、このセンサーを使うと、ロボカップでの用途の場合、
回転角度を一定にして回転したり、方法によっては方位ではなく「方向」の検知などが行えます。
まぁ他にも傾きとかも検知出来ますけど・・・今の飛行機にはこのセンサーが搭載されています。
昔はでっかいジャイロスコープを中に乗っけてそれを回転させてジャイロ効果で姿勢を安定させていたらしいですが、
今はちゃんとした電子回路のセンサーで制御しています。
因みにヘリの場合、後ろについてるプロペラ(ロータ)がジャイロスコープの代わりなんだそうです。
という訳でジャイロセンサーの紹介でした。
因みに、これはANのセンサーで、秒間300回の読み取り性能を持っています。
それでは、また。
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCupJunior
これから明日の朝にかけて、電気通信部のコンテストがあります。
なぜかはわかりませんが、流れで参加することに。
まぁ電気工事士の実技講習は正直余裕なので、でてみるかー。ってなったわけです。
(というかそういうことにしておいてください(笑))
それで、実際のコンテストの開催時間は今日の夜21:00から明日の昼12:00まで。
要するに一昼夜(むしろ一夜昼?)活動するわけなのですが、未だに何をするのかがワカラナイ・・・
大雑把には掴めたのですが、細かいところはよく・・・
まず大会名もわからないし・・・。
とりあえずわかっていることは、参加者同士で交信し合って、その交信数が多いところが勝ち。
つまり沢山交信したもん勝ちというわけです。
大会自体は部室で行なって、大会終了時に結果をPCで本部に送るというシステムだそうです。
つまり知り合いで同じコンテストに出ている人がいればイカ・・・もできる訳ですね。
まぁ勝つことを目的としているわけではないそうなので、わざわざそんなこともしませんけど。
というわけで交代で夜通し電波飛ばす競技というわけですね。きっと。うん。
あとのことは知りません。だって部長が何もいってくれないんだもん。
シフトすらわからないので、競技当日なのに、いつ何をすればいいのかがわからない・・・
これ、大丈夫なのかなぁ。
まぁ後で大会報告でも致しますよ。
因みにこの前部長に、「無線機の性能上、上位になることは有り得ない。」と断言されてしまいました。
やっぱり・・・機材か(苦笑)
という訳でこの記事はここで終了です。
ではまた。
今日はまだ更新するかもしれませんね、。暇ですから。
(^・ω・)ノRadiumProduction in RoboCupJunior
なぜかはわかりませんが、流れで参加することに。
まぁ電気工事士の実技講習は正直余裕なので、でてみるかー。ってなったわけです。
(というかそういうことにしておいてください(笑))
それで、実際のコンテストの開催時間は今日の夜21:00から明日の昼12:00まで。
要するに一昼夜(むしろ一夜昼?)活動するわけなのですが、未だに何をするのかがワカラナイ・・・
大雑把には掴めたのですが、細かいところはよく・・・
まず大会名もわからないし・・・。
とりあえずわかっていることは、参加者同士で交信し合って、その交信数が多いところが勝ち。
つまり沢山交信したもん勝ちというわけです。
大会自体は部室で行なって、大会終了時に結果をPCで本部に送るというシステムだそうです。
つまり知り合いで同じコンテストに出ている人がいればイカ・・・もできる訳ですね。
まぁ勝つことを目的としているわけではないそうなので、わざわざそんなこともしませんけど。
というわけで交代で夜通し電波飛ばす競技というわけですね。きっと。うん。
あとのことは知りません。だって部長が何もいってくれないんだもん。
シフトすらわからないので、競技当日なのに、いつ何をすればいいのかがわからない・・・
これ、大丈夫なのかなぁ。
まぁ後で大会報告でも致しますよ。
因みにこの前部長に、「無線機の性能上、上位になることは有り得ない。」と断言されてしまいました。
やっぱり・・・機材か(苦笑)
という訳でこの記事はここで終了です。
ではまた。
今日はまだ更新するかもしれませんね、。暇ですから。
(^・ω・)ノRadiumProduction in RoboCupJunior
今まで、このカテゴリーでは、
・PWMの説明
・アナログとデジタル
・回路作成に必要なもの 材料 工具
・電流、電圧、電力について
・抵抗の話 1,2,3
・コンデンサの話 1,2,3,4
・回路図について
・ダイオードの話 1,2,3
と、このように色々な説明をしてきました。
まぁまだまだ回路についての記事は沢山書けるもの(特に素子の紹介)があるのですが、
とりあえずそれは置いておいて、今回、ようやくPICについての話をしようと思います。
PICというのは講習でもやったように、Peripheral Interface Controllerの略で、
要するになにかというと、ちっちゃなコンピューター=マイクロコントローラー、所謂マイコンの一種です。
専門用語だとLSIの1種っていう扱いになるんですけど・・・めんどくさい!
まぁPICはその中でもちょっと性能は残念だけど、
資料も多くて使いやすく、安いことから世界中で(主に日本だけど)人気があるマイコンです。
マイコンというのは・・・電気で動いて、プログラムをPCから書き込むことで、色々な動作を行うことができる・・・
所謂RCXやNXTの中の人、と言ったらいいでしょうか。そんな感じものです。人間でいう頭脳だね。
それでこのマイコンたちは全部、デジタルで動いています。
つまり電圧があるorない、これだけで全てのプログラムを電気的に表現して、動作をしています。
ちょっと難しいですね。まぁ要するにマイコンの中には沢山スイッチがはいっていて、
そのスイッチがついているかついていないか、これを内部で判断して別のスイッチを付けたり消したり・・・
ということを何千何万と行って動いているということです。実際はちょっと違いますけど・・・まぁこんなもんでしょう。
それで、そのスイッチの開け閉めを命令するのがプログラムと、まぁこんな感じです。
そうそう、PCとかでよく、クロックの周波数、とか聞きますよね、1.6Gとか2.4Gとか。最近は3G越えも珍しくないですよね。
あれはそのPCが一秒間でスイッチを開け閉めできる回数を意味しているのです。
つまりクロック数が1Gとかだと1秒間に10億回スイッチの開け閉めができるという訳です。
無論この回数が多くなればなるほどプログラムの実行の速度が速くなりますよね。
だからクロックが速い方がPCの動作は早いのですね。
まぁこのクロックというものは、もちろんマイコンにもついていて、
PICの場合だと大体8~120MHzくらいものがありますね。PCを比べると極端に遅いことがわかります。
また、古いPICだとこのクロックを生み出す発振子がPIC内部に搭載されていなかったりするので
このようなセラミック発振子を使ったりしていました。

今のPICは発信子が内蔵されていますのでこれは必要ありませんね。
そういった経緯があって今のPICは電源をつなぐだけで動作してくれるといっていいでしょう。
昔と比べて非常に簡単になりました。
まぁこれなら誰でも扱える・・・はず!
という訳で今日はPICについてさらっとお話ししました。
もうちょっと深いところはまた今度ということで
それではそれでは。
(^・ω・)ノRadiumProduction in RoboCup Junior
・PWMの説明
・アナログとデジタル
・回路作成に必要なもの 材料 工具
・電流、電圧、電力について
・抵抗の話 1,2,3
・コンデンサの話 1,2,3,4
・回路図について
・ダイオードの話 1,2,3
と、このように色々な説明をしてきました。
まぁまだまだ回路についての記事は沢山書けるもの(特に素子の紹介)があるのですが、
とりあえずそれは置いておいて、今回、ようやくPICについての話をしようと思います。
PICというのは講習でもやったように、Peripheral Interface Controllerの略で、
要するになにかというと、ちっちゃなコンピューター=マイクロコントローラー、所謂マイコンの一種です。
専門用語だとLSIの1種っていう扱いになるんですけど・・・めんどくさい!
まぁPICはその中でもちょっと性能は残念だけど、
資料も多くて使いやすく、安いことから世界中で(主に日本だけど)人気があるマイコンです。
マイコンというのは・・・電気で動いて、プログラムをPCから書き込むことで、色々な動作を行うことができる・・・
所謂RCXやNXTの中の人、と言ったらいいでしょうか。そんな感じものです。人間でいう頭脳だね。
それでこのマイコンたちは全部、デジタルで動いています。
つまり電圧があるorない、これだけで全てのプログラムを電気的に表現して、動作をしています。
ちょっと難しいですね。まぁ要するにマイコンの中には沢山スイッチがはいっていて、
そのスイッチがついているかついていないか、これを内部で判断して別のスイッチを付けたり消したり・・・
ということを何千何万と行って動いているということです。実際はちょっと違いますけど・・・まぁこんなもんでしょう。
それで、そのスイッチの開け閉めを命令するのがプログラムと、まぁこんな感じです。
そうそう、PCとかでよく、クロックの周波数、とか聞きますよね、1.6Gとか2.4Gとか。最近は3G越えも珍しくないですよね。
あれはそのPCが一秒間でスイッチを開け閉めできる回数を意味しているのです。
つまりクロック数が1Gとかだと1秒間に10億回スイッチの開け閉めができるという訳です。
無論この回数が多くなればなるほどプログラムの実行の速度が速くなりますよね。
だからクロックが速い方がPCの動作は早いのですね。
まぁこのクロックというものは、もちろんマイコンにもついていて、
PICの場合だと大体8~120MHzくらいものがありますね。PCを比べると極端に遅いことがわかります。
また、古いPICだとこのクロックを生み出す発振子がPIC内部に搭載されていなかったりするので
このようなセラミック発振子を使ったりしていました。
今のPICは発信子が内蔵されていますのでこれは必要ありませんね。
そういった経緯があって今のPICは電源をつなぐだけで動作してくれるといっていいでしょう。
昔と比べて非常に簡単になりました。
まぁこれなら誰でも扱える・・・はず!
という訳で今日はPICについてさらっとお話ししました。
もうちょっと深いところはまた今度ということで
それではそれでは。
(^・ω・)ノRadiumProduction in RoboCup Junior
改悪だろこれ。見にくい・・・(笑)
という訳で、以前お話しした耀に今回は、scanf文のもっとコアな使い方について説明したいと思います。
前回の話では、通常はscanfの文は
こんな風や、
scanf("%c",&s);
こんな風に
scanf("%d",&x);
記述することで、キーボードから値を入力することができるものであるというで辺りで終わったかと思います。
今回はこの入力をもっと複雑に行う方法について紹介します。
例えばこんな感じのプログラム。
#include <stdio.h>
int main(void)
{
char s;
printf("PIC講習は終了しましたか?(y/n)");
scanf("%[yn]",&s);
printf("貴方の答えは%cです。",s);
return 0;
}
このプログラムだと、scanfは小文字のyとnしか認識しません。
yかn以外の文字や数字が入力された場合は、強制的に読み取りを中止します。
つまりyかn以外の返答は無視されるようなプログラムが作成できます。
このように[]内で指定した文字のみを入力し、それ以外を入力しないシステムを、スキャン集合指定子といいます。
なんだかフィルタのようなものですよね。実際そんな感じです。
でも、この読み取る文字が例えば、数字以外、なんて感じにしたい場合に、これだと大変ですよね。
なので逆に今度は「読み取らない文字」を指定する方法を紹介します。
#include <stdio.h>
int main(void)
{
char s;
printf("評価を入力してください(A~Zランク)");
scanf("%[^0123456789\n]",&s);
printf("評価ランクは%cです。",s);
return 0;
}
このように読み取らない文字を指定する場合は、先程と同じように指定したい文字を[]で囲います。
そして指定する文字の前に^を付けます。これで読み取らない文字の指定をすることができます。
このプログラムで読み取らない文字は0から9の数字と\nという記号です。
これは\とnではなく、\nで一つの記号を意味しています。記号の意味はズバリ、「改行」です。
C言語においては、改行を\nという記号で示しているのです。これをそのまま改行記号といいます。
だから例えばprintfで
あ
い
う
え
お
と表示したい場合は
printf("あ
い
う
え
お
");
と記述するのではなく、
printf("あ\nい\nう\nえ\nお\n");
と記述すればいいという訳です。
また先程の0から9の指定は
scanf("%[^0-9\n]",&s);
このようにハイフンを使って簡略化することができます。
これは全てのコンパイラで対応している訳ではないんですが、
一般的に使える方法なので覚えておくとさらに便利ですね。
まだまだscanfには色々と複雑な記述方法がありますが、
scanfだけをいつまでもぐだぐだやっている訳にもいかないので、
scanfの話はこの辺で一度終了とさせていただきます。
まぁまた時間があればこの話はしていこうかな。
それで次回ですが、次回はいよいよ条件式、まずはif文について書いていこうと思います。
それではまたまた。
(^・ω・)ノRadiumProduction in RoboCup Junior
という訳で、以前お話しした耀に今回は、scanf文のもっとコアな使い方について説明したいと思います。
前回の話では、通常はscanfの文は
こんな風や、
scanf("%c",&s);
こんな風に
scanf("%d",&x);
記述することで、キーボードから値を入力することができるものであるというで辺りで終わったかと思います。
今回はこの入力をもっと複雑に行う方法について紹介します。
例えばこんな感じのプログラム。
#include <stdio.h>
int main(void)
{
char s;
printf("PIC講習は終了しましたか?(y/n)");
scanf("%[yn]",&s);
printf("貴方の答えは%cです。",s);
return 0;
}
このプログラムだと、scanfは小文字のyとnしか認識しません。
yかn以外の文字や数字が入力された場合は、強制的に読み取りを中止します。
つまりyかn以外の返答は無視されるようなプログラムが作成できます。
このように[]内で指定した文字のみを入力し、それ以外を入力しないシステムを、スキャン集合指定子といいます。
なんだかフィルタのようなものですよね。実際そんな感じです。
でも、この読み取る文字が例えば、数字以外、なんて感じにしたい場合に、これだと大変ですよね。
なので逆に今度は「読み取らない文字」を指定する方法を紹介します。
#include <stdio.h>
int main(void)
{
char s;
printf("評価を入力してください(A~Zランク)");
scanf("%[^0123456789\n]",&s);
printf("評価ランクは%cです。",s);
return 0;
}
このように読み取らない文字を指定する場合は、先程と同じように指定したい文字を[]で囲います。
そして指定する文字の前に^を付けます。これで読み取らない文字の指定をすることができます。
このプログラムで読み取らない文字は0から9の数字と\nという記号です。
これは\とnではなく、\nで一つの記号を意味しています。記号の意味はズバリ、「改行」です。
C言語においては、改行を\nという記号で示しているのです。これをそのまま改行記号といいます。
だから例えばprintfで
あ
い
う
え
お
と表示したい場合は
printf("あ
い
う
え
お
");
と記述するのではなく、
printf("あ\nい\nう\nえ\nお\n");
と記述すればいいという訳です。
また先程の0から9の指定は
scanf("%[^0-9\n]",&s);
このようにハイフンを使って簡略化することができます。
これは全てのコンパイラで対応している訳ではないんですが、
一般的に使える方法なので覚えておくとさらに便利ですね。
まだまだscanfには色々と複雑な記述方法がありますが、
scanfだけをいつまでもぐだぐだやっている訳にもいかないので、
scanfの話はこの辺で一度終了とさせていただきます。
まぁまた時間があればこの話はしていこうかな。
それで次回ですが、次回はいよいよ条件式、まずはif文について書いていこうと思います。
それではまたまた。
(^・ω・)ノRadiumProduction in RoboCup Junior
今日の講習会は、PICについての一連の開発の流れを紹介しました。
これでもう総書記様はPICについては完璧になってくれるでしょう。
という訳で部のPIC講習は今日で終了いたします。
詳しい内容は今度。
(^・ω・)ノRadiumProduction in RoboCupJunior
これでもう総書記様はPICについては完璧になってくれるでしょう。
という訳で部のPIC講習は今日で終了いたします。
詳しい内容は今度。
(^・ω・)ノRadiumProduction in RoboCupJunior
産技祭とは?
所謂一つの高専祭です。昨年、名称変更されたようです。
でもやっぱり高専祭で定着していますからね。産技祭と呼んでいる人はごく少数派です。
という訳で、ここでも高専祭ってことで記事を書いていきます。
産技祭って言っても誰もわからないからね(笑)
まぁなんでロボカップで高専祭に出店するという話になったかといいますと、
端的に言って「おカネが殆どない」からなんですね。
LEGOで作る際には学校に部品があるので、何の問題もないのですが、
やっぱり自作などをする場合、ロボットの作成を全部自費となると、結構痛い額きちゃうんですね。
となるとやはり方法はひとつ。「稼ぐしかない。」
という単純思考です。
そしてもう一つの目的、金儲けという大きな目的の陰になっているのですが、これも結構大きいです。
実は昔はロボカップは高専祭でちゃんとまともな出店をしていたんです。
なんか競技会とかもやっていたl記憶があります。まぁ5年以上前の話のような気もしますけど。
なのに、ここ数年はニートしてます。他の部活は色々してるのに・・・さすがにこれはマズくないですか?色々と。
という訳です。部活の宣伝もしなくちゃですしね。来年度の新入部員の為にもね・・・
そんな感じで、今年は高専祭も視野に入れての活動をする予定です。
なにをするかといいますと、うーん大会の宣伝とか、過去の戦歴と最近の黒歴史の暴露
あとはRCXのロボットを大量にサッカーフィールドに押し込んで暴れさせる、という恒例の
いつもやっているよくわからないアレとか・・・
にプラスしてなんかネタ商品の販売でもしようかと考えています。
此方の方はどう考えてもロボカップと関係ないものを販売することになるでしょうが。
当初ユッケも考えましたが、食べ物は衛生上色々めんどくさそうなので、
回路でも、キホルダでも作って売ろうかなの流れになってきています。
まぁまだ正式にやるかも決まっていないのでアレですが、
財布に余裕のある方は高専祭にぜひ来ていただけると嬉しいです。
10月の29,30日に開催ですよー。
それでは。今日は4か月後の宣伝でした。
まずは出店の顧問の先生みつけなきゃ。
(^・ω・)ノRadiumProduction in RoboCupJunior
所謂一つの高専祭です。昨年、名称変更されたようです。
でもやっぱり高専祭で定着していますからね。産技祭と呼んでいる人はごく少数派です。
という訳で、ここでも高専祭ってことで記事を書いていきます。
産技祭って言っても誰もわからないからね(笑)
まぁなんでロボカップで高専祭に出店するという話になったかといいますと、
端的に言って「おカネが殆どない」からなんですね。
LEGOで作る際には学校に部品があるので、何の問題もないのですが、
やっぱり自作などをする場合、ロボットの作成を全部自費となると、結構痛い額きちゃうんですね。
となるとやはり方法はひとつ。「稼ぐしかない。」
という単純思考です。
そしてもう一つの目的、金儲けという大きな目的の陰になっているのですが、これも結構大きいです。
実は昔はロボカップは高専祭でちゃんとまともな出店をしていたんです。
なんか競技会とかもやっていたl記憶があります。まぁ5年以上前の話のような気もしますけど。
なのに、ここ数年はニートしてます。他の部活は色々してるのに・・・さすがにこれはマズくないですか?色々と。
という訳です。部活の宣伝もしなくちゃですしね。来年度の新入部員の為にもね・・・
そんな感じで、今年は高専祭も視野に入れての活動をする予定です。
なにをするかといいますと、うーん大会の宣伝とか、過去の戦歴と最近の黒歴史の暴露
あとはRCXのロボットを大量にサッカーフィールドに押し込んで暴れさせる、という恒例の
いつもやっているよくわからないアレとか・・・
にプラスしてなんかネタ商品の販売でもしようかと考えています。
此方の方はどう考えてもロボカップと関係ないものを販売することになるでしょうが。
回路でも、キホルダでも作って売ろうかなの流れになってきています。
まぁまだ正式にやるかも決まっていないのでアレですが、
財布に余裕のある方は高専祭にぜひ来ていただけると嬉しいです。
10月の29,30日に開催ですよー。
それでは。今日は4か月後の宣伝でした。
まずは出店の顧問の先生みつけなきゃ。
(^・ω・)ノRadiumProduction in RoboCupJunior
講習は副部長にお任せです。
まぁ月曜日の短い時間の中でやったことを時間のある火曜にのんびりとやるわけですから、
副部長の能力なら問題なく終わらせられたことでしょう。
此方はというと・・・
「実技試験なのに算数の計算があるなんて・・・くそぉ。」
線の切る長さを間違えまくりました。(っていうか最初の時点で長さ足りないし!)
ってあ。被膜もげた(笑)
みたいなことをずっとしていました。この先・・・大丈夫か?
今日はそんな感じで過ぎていきました。
とりあえず来週、ダンスのプレゼンの発表会とクリーンルームの掃除を行います。
時間的に掃除の方を優先したいので、もしかしたらプレゼンの方は次週に先延ばしになるかも知れません。
どうにせよ、掃除は行うので、部員の方はできる限り参加してください。
あと、ロボカップ初心者の部員はサマーチャレンジに参加するような方向の流れの話が今着ています。
多分参加することになると思いますので、該当する部員は腹をくくってください。
それでは。詳細は後日。
(^・ω・)ノRadiumProduction in RoboCupJunior
まぁ月曜日の短い時間の中でやったことを時間のある火曜にのんびりとやるわけですから、
副部長の能力なら問題なく終わらせられたことでしょう。
此方はというと・・・
「実技試験なのに算数の計算があるなんて・・・くそぉ。」
線の切る長さを間違えまくりました。(っていうか最初の時点で長さ足りないし!)
ってあ。被膜もげた(笑)
みたいなことをずっとしていました。この先・・・大丈夫か?
今日はそんな感じで過ぎていきました。
とりあえず来週、ダンスのプレゼンの発表会とクリーンルームの掃除を行います。
時間的に掃除の方を優先したいので、もしかしたらプレゼンの方は次週に先延ばしになるかも知れません。
どうにせよ、掃除は行うので、部員の方はできる限り参加してください。
あと、ロボカップ初心者の部員はサマーチャレンジに参加するような方向の流れの話が今着ています。
多分参加することになると思いますので、該当する部員は腹をくくってください。
それでは。詳細は後日。
(^・ω・)ノRadiumProduction in RoboCupJunior
8限終了後に部室に集合してくださいな。
PCと電池をお忘れなく。
といっても今ここに書いて何人見てるやら・・・(笑)
今日はNQCの基本的な使い方と単純なプログラムについての講習会を行います。
事前予告したとおりですね。
なんかUSBタワーのwin7とMACでの動作が不安定なので
下手したらソフトのインストールだけで終了するかもしれませんが・・・・
まぁそれはないようにしたいですね。
ちなみに明日の講習会ですが、電気工事士の講習があるので、
僕は途中から抜けて、それ以降は副部長に全部任せることになります。
なので頑張れ副部長(笑)
また、講習会とは関係ないですが、今度クリーンルームの掃除も行いたいと考えています。
まぁその時は事前告知するので、なるべく皆さん来るようにしてください。
それでは。
(^・ω・)ノRadiumProduction in RoboCupJunior
PCと電池をお忘れなく。
といっても今ここに書いて何人見てるやら・・・(笑)
今日はNQCの基本的な使い方と単純なプログラムについての講習会を行います。
事前予告したとおりですね。
なんかUSBタワーのwin7とMACでの動作が不安定なので
下手したらソフトのインストールだけで終了するかもしれませんが・・・・
まぁそれはないようにしたいですね。
ちなみに明日の講習会ですが、電気工事士の講習があるので、
僕は途中から抜けて、それ以降は副部長に全部任せることになります。
なので頑張れ副部長(笑)
また、講習会とは関係ないですが、今度クリーンルームの掃除も行いたいと考えています。
まぁその時は事前告知するので、なるべく皆さん来るようにしてください。
それでは。
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
(01/01)
(05/07)
(01/11)
プロフィール
HN:
Luz
性別:
男性
アーカイブ