RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
今日は神奈川西東京ノードで使われるフィールドや機材を車に搬入する作業をしてきました。
こういうことをしていると、あぁ。大会も近いなぁ。と感じますね。
まぁ現に東東京の1週間前なのでめっさ近いのですが(笑)
とりあえず明日は働いて、寝て、それですぐ明後日になるんだとうなぁ
ってあれ?明日が今日になってる・・・いつの間に(笑)
やばい。寝ないと。それではまた(逃)
(^・ω・)ノRadiumProduction in RoboCupJunior
こういうことをしていると、あぁ。大会も近いなぁ。と感じますね。
まぁ現に東東京の1週間前なのでめっさ近いのですが(笑)
とりあえず明日は働いて、寝て、それですぐ明後日になるんだとうなぁ
ってあれ?明日が今日になってる・・・いつの間に(笑)
やばい。寝ないと。それではまた(逃)
(^・ω・)ノRadiumProduction in RoboCupJunior
地震の影響で延期され、規模を小さくしての開催となります。
ようやく・・・といったところでしょうか。一時期開催も危ぶまれましたが、
ちゃんとこうして大会を行えることになって嬉しく思っています。
神奈川西東京ノードは、以前からオープン参加したり、会場設営をしたりと色々手伝いをさせて頂いていました。
因みに今回僕はレスキューのスタッフで参加することになっています。
当日は他のロボカップ部員もスタッフとして何名か参加しますので、他の部員共々、よろしくお願い致します。
さてと、寝坊しないように気をつけなくちゃ。
(^・ω・)ノRadiumProduction in RoboCupJunior
ようやく・・・といったところでしょうか。一時期開催も危ぶまれましたが、
ちゃんとこうして大会を行えることになって嬉しく思っています。
神奈川西東京ノードは、以前からオープン参加したり、会場設営をしたりと色々手伝いをさせて頂いていました。
因みに今回僕はレスキューのスタッフで参加することになっています。
当日は他のロボカップ部員もスタッフとして何名か参加しますので、他の部員共々、よろしくお願い致します。
さてと、寝坊しないように気をつけなくちゃ。
(^・ω・)ノRadiumProduction in RoboCupJunior
今回は市販センサーの紹介です。
今日紹介するのは此方の

圧力センサー、FSR400 です。
PTF(Polymer Thick Film、日本語訳で高分子厚膜フィルム)というデバイスを利用したセンサーで、
受けた圧力によってセンサー内部の電気抵抗量が変化する仕組みになっています。
簡単に言えば、圧力によって抵抗値が変化する抵抗。といったところでしょうか。
抵抗値が変化すれば、センサーに流れる電流量も変化しますから、当然センサーの端子間の電圧も変化し、
センサーの出力値もアナログで変化します。これはオームの法則から言えることですね。
まぁ要するに通常の光センサーなどと同じアナログセンサーに分類されるものになります。
感圧範囲は0.1kg~10kgで、
抵抗量は何も触れていない状態で1MΩ程となり、圧力が高くなるほど抵抗量が少なくなっていきます。
ちょっと前にロボカップジュニアでの用途はないかなぁと思って購入したのですが、どうにも思いつきませんね。
うーん。何かいいアイデアはないかなぁ。正確には用途は幾つか思いついたのですが、
よくよく考えると「他のセンサーを使った方が楽だ。」という結論に至るものばかりなのです(笑)
とりあえず、これだ!っていう用途を見つけないと・・・無駄使いになってしまう・・・(汗)
因みに皆さんのよく目にすることろではPS2やPS3のコントローラーのボタン等に使われていたりしますよ。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日紹介するのは此方の
圧力センサー、FSR400 です。
PTF(Polymer Thick Film、日本語訳で高分子厚膜フィルム)というデバイスを利用したセンサーで、
受けた圧力によってセンサー内部の電気抵抗量が変化する仕組みになっています。
簡単に言えば、圧力によって抵抗値が変化する抵抗。といったところでしょうか。
抵抗値が変化すれば、センサーに流れる電流量も変化しますから、当然センサーの端子間の電圧も変化し、
センサーの出力値もアナログで変化します。これはオームの法則から言えることですね。
まぁ要するに通常の光センサーなどと同じアナログセンサーに分類されるものになります。
感圧範囲は0.1kg~10kgで、
抵抗量は何も触れていない状態で1MΩ程となり、圧力が高くなるほど抵抗量が少なくなっていきます。
ちょっと前にロボカップジュニアでの用途はないかなぁと思って購入したのですが、どうにも思いつきませんね。
うーん。何かいいアイデアはないかなぁ。正確には用途は幾つか思いついたのですが、
よくよく考えると「他のセンサーを使った方が楽だ。」という結論に至るものばかりなのです(笑)
とりあえず、これだ!っていう用途を見つけないと・・・無駄使いになってしまう・・・(汗)
因みに皆さんのよく目にすることろではPS2やPS3のコントローラーのボタン等に使われていたりしますよ。
(^・ω・)ノRadiumProduction in RoboCupJunior
とりあえず開きました。
まず活動の一日目は・・・
部屋の掃除。
で終わりそうです(笑)
とりあえず、3週間前に作ったお茶を処分して(地震のせいで飲めなかった・・・(泣))
被災した2010サマーチャレンジのロボットの解体、そして机の整理。
ついでに落下した時計を元に戻しました。
学校そのものには結構多大な被害がでていますが、部室の方は平和そのもので、
時計と既に崩壊していた2010サマーチャレンジロボット以外は被害ゼロでした。
棚とかの荷物やロッカーの上にあるエッチングの廃液ですらも落ちてくることもなく、
電子情報コースの某研究室のようにひっくり返ることもありませんでした。
それはいいのですが・・・大会、間に合うかなぁ・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
まず活動の一日目は・・・
部屋の掃除。
で終わりそうです(笑)
とりあえず、3週間前に作ったお茶を処分して(地震のせいで飲めなかった・・・(泣))
被災した2010サマーチャレンジのロボットの解体、そして机の整理。
ついでに落下した時計を元に戻しました。
学校そのものには結構多大な被害がでていますが、部室の方は平和そのもので、
時計と既に崩壊していた2010サマーチャレンジロボット以外は被害ゼロでした。
棚とかの荷物やロッカーの上にあるエッチングの廃液ですらも落ちてくることもなく、
電子情報コースの某研究室のようにひっくり返ることもありませんでした。
それはいいのですが・・・大会、間に合うかなぁ・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
このサイトを見てきている皆さんなら、一度は LEGOブロックに触ったことがあると思います。
そして実際に遊んだり、LEGOでロボットを作っている人なら一度は経験したことがあるであろう状況がこれ。
「あ。部品がない・・・><。」
これによって、せっかく作りたかったものも作れなくなってしまうこと。ありますよね?
LEGOブロックは只でさえとても高いですから、部品を買って作るとしても大変です。
お金に余裕のある人ならともかく、お金がないとちょっと難しいですよね。
でも、お金がなくてもタダで作りたいものを、好きにLEGOブロックで作ることができる方法があるんです。
どういう方法かというと、パソコン上でブロックを組み立ててしまう方法です。
パソコンなら、部品のデータさえあれば個数は無限に使用できますから、
リアルより自由な作品の作成ができるという訳です。
こういうパソコン上で部品を組み立てて、様々な設計を行うことをCAD(Computer Aided Design)といいます。
直訳で「コンピューター支援設計」といった感じになりますからそのままですね。
それでCADをすることができるソフトをそのまま、CADソフトと呼びます。
最近ではソフトそのものを「CAD」と呼ぶことも多いようです。
昔は製図用紙の様に、2次元での製図のみのCADソフトが一般的だったのですが、
最近では3D。つまり3次元で実際に部品をPC上で作り、作成して、実際に動作させる。
といったところまでできるCADソフトが一般的になっています。
凄いのだと強度試験とかもバーチャルでできるようですね。すごいです。
このPCにもソリッドワークスというCADソフトが入っていたりしますが、今回はその話は致しません。
今日紹介するのはLEGOの為に作られた、LEGO専用のLEGOCADです。
今回はその中でも、僕が昔から使っているMLCADというCADソフトについて紹介します。
上のロゴや、Radium機の試作に使用したCADソフトです。
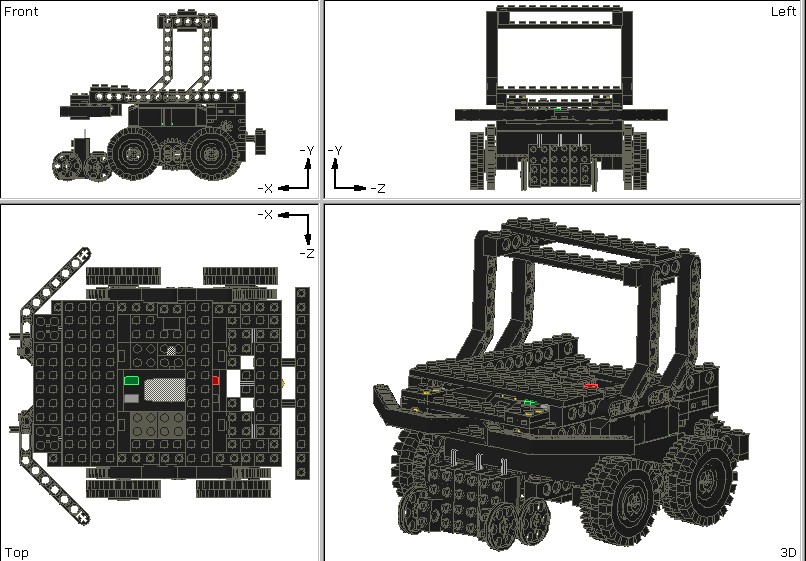
フリーソフトで、自由にダウンロードができ、本格的に設計をすることができます。
基本的に本家サイトには日本語版はありませんが、
日本語のランゲージパックが別途このサイトからダウンロードできるようになっています。
まぁめんどくさいから僕は英語版のまま使用していますが。
また、通常版にはNXT関連の部品がありませんが、このサイトでNXTのライブラリが公開されているので、
ダウンロードしてパソコンのC\LDrawに解凍し、MLCADを起動してfile→ScanPartsをクリックすることで
NXT関連のパーツも使用することができるようになります。
それ以外でも必要なパーツがあれば、このサイトにライブラリがあるので
検索してdatファイルをダウンロードし、C\LDraw\Partsにコピーし、MLCADを起動し、上と同じことをすれば
ダウンロードしたライブラリデータが使えるようになります。
もちろん、CAD、つまり設計用なので自分でPC上で作りたいものを作るだけでなく、
実際に作成するロボット等の設計にも使えます。(むしろそっちがメインの使い方なんだけど・・・)
まぁLEGOの場合、慣れてくると、大まかな形だけMLCADを使って設計するけど、
細かいところは実際に作って決めていく・・・みたいな感じになってしまいます。だってその方が速いんだもん。
そんなMLCADの紹介でした。暇だったら今度使い方も合わせて説明したりするかもしれません。
因みに今日はずっとMLCADで遊んでました。今日はこれにて。
(^・ω・)ノRadiumProduction in RoboCupJunior
そして実際に遊んだり、LEGOでロボットを作っている人なら一度は経験したことがあるであろう状況がこれ。
「あ。部品がない・・・><。」
これによって、せっかく作りたかったものも作れなくなってしまうこと。ありますよね?
LEGOブロックは只でさえとても高いですから、部品を買って作るとしても大変です。
お金に余裕のある人ならともかく、お金がないとちょっと難しいですよね。
でも、お金がなくてもタダで作りたいものを、好きにLEGOブロックで作ることができる方法があるんです。
どういう方法かというと、パソコン上でブロックを組み立ててしまう方法です。
パソコンなら、部品のデータさえあれば個数は無限に使用できますから、
リアルより自由な作品の作成ができるという訳です。
こういうパソコン上で部品を組み立てて、様々な設計を行うことをCAD(Computer Aided Design)といいます。
直訳で「コンピューター支援設計」といった感じになりますからそのままですね。
それでCADをすることができるソフトをそのまま、CADソフトと呼びます。
最近ではソフトそのものを「CAD」と呼ぶことも多いようです。
昔は製図用紙の様に、2次元での製図のみのCADソフトが一般的だったのですが、
最近では3D。つまり3次元で実際に部品をPC上で作り、作成して、実際に動作させる。
といったところまでできるCADソフトが一般的になっています。
凄いのだと強度試験とかもバーチャルでできるようですね。すごいです。
このPCにもソリッドワークスというCADソフトが入っていたりしますが、今回はその話は致しません。
今日紹介するのはLEGOの為に作られた、LEGO専用のLEGOCADです。
今回はその中でも、僕が昔から使っているMLCADというCADソフトについて紹介します。
上のロゴや、Radium機の試作に使用したCADソフトです。
フリーソフトで、自由にダウンロードができ、本格的に設計をすることができます。
基本的に本家サイトには日本語版はありませんが、
日本語のランゲージパックが別途このサイトからダウンロードできるようになっています。
まぁめんどくさいから僕は英語版のまま使用していますが。
また、通常版にはNXT関連の部品がありませんが、このサイトでNXTのライブラリが公開されているので、
ダウンロードしてパソコンのC\LDrawに解凍し、MLCADを起動してfile→ScanPartsをクリックすることで
NXT関連のパーツも使用することができるようになります。
それ以外でも必要なパーツがあれば、このサイトにライブラリがあるので
検索してdatファイルをダウンロードし、C\LDraw\Partsにコピーし、MLCADを起動し、上と同じことをすれば
ダウンロードしたライブラリデータが使えるようになります。
もちろん、CAD、つまり設計用なので自分でPC上で作りたいものを作るだけでなく、
実際に作成するロボット等の設計にも使えます。(むしろそっちがメインの使い方なんだけど・・・)
まぁLEGOの場合、慣れてくると、大まかな形だけMLCADを使って設計するけど、
細かいところは実際に作って決めていく・・・みたいな感じになってしまいます。だってその方が速いんだもん。
そんなMLCADの紹介でした。暇だったら今度使い方も合わせて説明したりするかもしれません。
因みに今日はずっとMLCADで遊んでました。今日はこれにて。
(^・ω・)ノRadiumProduction in RoboCupJunior
どうやら、産技高専では
4月1日から部活動が解禁になったようです。
つまり明後日。ようやく・・・といったところでしょうか。
まだ条件付きではありますが、とりあえず部室が開くのであれば、非常に助かりますね。
という訳で明後日からようやくロボカップに向けての活動が再開されます。
さて、これから1週間でどこまで間に合わせられるでしょうか・・・(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
4月1日から部活動が解禁になったようです。
つまり明後日。ようやく・・・といったところでしょうか。
まだ条件付きではありますが、とりあえず部室が開くのであれば、非常に助かりますね。
という訳で明後日からようやくロボカップに向けての活動が再開されます。
さて、これから1週間でどこまで間に合わせられるでしょうか・・・(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
ネタ切れになると過去の話を持ち出す。悪い癖です←
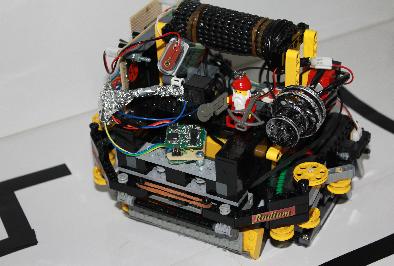
という訳で今回は昨年まで使用していたロボットの過去の紹介をしようかと思います。
マイナーチェンジを繰りかえしてきて、ずっと使ってきた訳ですが、このロボットの誕生は今から4年程前。
ちょうど2007ジャパンオープン直前です。
最初の構想はこれ。
「ロボットにしっかりした取っ手をつけよう。」
ちょうどこの頃が審判トラブルの全盛期でしたからね。その対策という意味だけです。
そうして考えられたフレームはこれ。

でもこの時、既にジャパンオープンを直前に控えていたので、流石にロボットの変更はマズイ・・・
ということでこのフレームへの移行はせずに、旧型のロボットのまま、大会に臨みました。
このフレームも持って・・・
ところが、まさかの予選敗退。
2007年度の大会について書かれた記事はここで終了していますが、
実は、敗退後、大会の最終日の前日深夜になって、今後に繋がる大きな出来事があったのです。
それはフレームの実装。

最終日に全く変わった機体で会場に登場させてみたりしたのです。
なのでこのロボット、「2008年度の大会から使用」ということになっていますが、実際は決勝に出ていないだけで
大会そのものとしては2007年度のジャパンオープンから使用しているものなのです。
まぁこの時はまだ、モーターが横についているので機体も大きく、バンパーの色も変な色で
よくわからないものだったのですが、
そこからマイナーチェンジを行い、

モーターがRCXの後ろに行き、RCXが横付けされ、
光ってみたり、
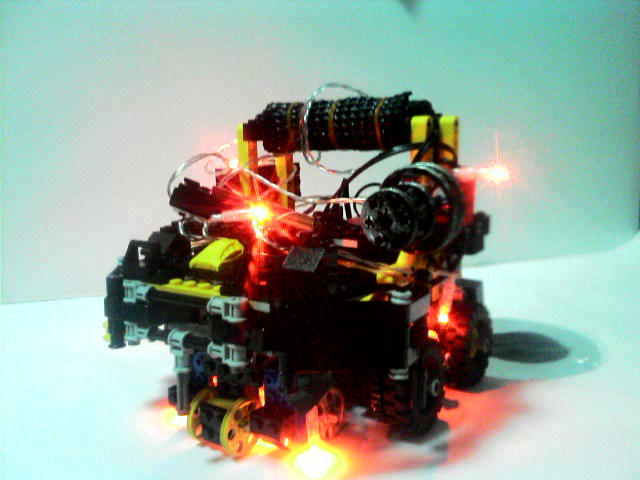
ガトリングも復活させ、水銀スイッチも導入して、2008年のロボカップジュニアに臨んだわけです。
そして2008年のロボカップジュニア東京ノード大会。
こんな機体になっていました。

特徴としては外部電源によるセンサー用LEDの増設、
そして無音走行、(のように思えるほど静かな走行)
そして一番大きいのが
「ライトセンサー4個制御」でしょう。
RCXは入力ポート3つしかないのですが、その上での4個制御。
正直ごり押しでしたね。結局ちゃんと(?)動作したので問題は無い訳ですが・・・
この時は出てきた値を関数にぶっこんで計算させて、その計算値からラインの位置割りだしてたんだっけか。
こんな真似するような人は他にいないであろう・・・と信じたい。
とまぁこんなロボットで関東ブロックまで行って爆発。
後に沼津の2008ジャパンオープンにオープン参加で出場
セカンダリで出場(当時プライマリ)したにも関わらず何故か決勝に残ってしまいました。
まぁ結局4つの制御に無理があったんですね。ってことにしておく(笑)
そんな感じでこの辺りからどんどん「LEGOに囚われないロボット」化が進んでいくわけですが・・・
今回はこのあたりで一旦終わりです。
それでは~
(^・ω・)ノRadiumProduction in RoboCupJunior
という訳で今回は昨年まで使用していたロボットの過去の紹介をしようかと思います。
マイナーチェンジを繰りかえしてきて、ずっと使ってきた訳ですが、このロボットの誕生は今から4年程前。
ちょうど2007ジャパンオープン直前です。
最初の構想はこれ。
「ロボットにしっかりした取っ手をつけよう。」
ちょうどこの頃が審判トラブルの全盛期でしたからね。その対策という意味だけです。
そうして考えられたフレームはこれ。
でもこの時、既にジャパンオープンを直前に控えていたので、流石にロボットの変更はマズイ・・・
ということでこのフレームへの移行はせずに、旧型のロボットのまま、大会に臨みました。
このフレームも持って・・・
ところが、まさかの予選敗退。
2007年度の大会について書かれた記事はここで終了していますが、
実は、敗退後、大会の最終日の前日深夜になって、今後に繋がる大きな出来事があったのです。
それはフレームの実装。
最終日に全く変わった機体で会場に登場させてみたりしたのです。
なのでこのロボット、「2008年度の大会から使用」ということになっていますが、実際は決勝に出ていないだけで
大会そのものとしては2007年度のジャパンオープンから使用しているものなのです。
まぁこの時はまだ、モーターが横についているので機体も大きく、バンパーの色も変な色で
よくわからないものだったのですが、
そこからマイナーチェンジを行い、
モーターがRCXの後ろに行き、RCXが横付けされ、
光ってみたり、
ガトリングも復活させ、水銀スイッチも導入して、2008年のロボカップジュニアに臨んだわけです。
そして2008年のロボカップジュニア東京ノード大会。
こんな機体になっていました。
特徴としては外部電源によるセンサー用LEDの増設、
そして無音走行、(のように思えるほど静かな走行)
そして一番大きいのが
「ライトセンサー4個制御」でしょう。
RCXは入力ポート3つしかないのですが、その上での4個制御。
正直ごり押しでしたね。結局ちゃんと(?)動作したので問題は無い訳ですが・・・
この時は出てきた値を関数にぶっこんで計算させて、その計算値からラインの位置割りだしてたんだっけか。
こんな真似するような人は他にいないであろう・・・と信じたい。
とまぁこんなロボットで関東ブロックまで行って爆発。
後に沼津の2008ジャパンオープンにオープン参加で出場
セカンダリで出場(当時プライマリ)したにも関わらず何故か決勝に残ってしまいました。
まぁ結局4つの制御に無理があったんですね。ってことにしておく(笑)
そんな感じでこの辺りからどんどん「LEGOに囚われないロボット」化が進んでいくわけですが・・・
今回はこのあたりで一旦終わりです。
それでは~
(^・ω・)ノRadiumProduction in RoboCupJunior
人気といっても恐らくレスキューだけですが。サッカーで使ったら(ルール上からして)反則だし・・・
HiTechnic社製の光距離センサー、通称EOPDセンサーです。

光を出して、その反射量、反射角からセンサーの前の物体までの距離を検出します。
光を出す、という点では従来のライトセンサーと同じですが、従来のライトセンサーと違って、
外部光、つまり、センサーから出た光以外はフィルターでシャットアウトして検出しないようになっているので
周りが明るかろうが、暗かろうが、関係なしに正確に物体までの距離を検出できます。
しかし、正確に測定できる限界は20㎝程のようですね。「正確」の基準がよくわかりませんが。
単純に距離だけが微妙に実際とズレる程度で検出はちゃんと行うのでしょうか?
それとも検出そのものがうまくできないのでしょうか?その辺りの記載が無い当たりちょっと不親切ですね。
「買って確かめろ」ってことでしょうか?
検出距離に関しましては標準レンジとロングレンジという2つのレンジがあり、
ロングにすると標準の約4倍の距離の検出ができるようになるようです。
これ検出距離が80㎝になるってこと?
それとも標準レンジだと5㎝が限界ってこと?
後者の場合、光距離センサーとしてかなり致命的な気もしますが・・・
あとインターフェイスはアナログとなっています。他のセンサーとの併用も可能です。
使ってみたいような気もしますが、うちの学校では恐らく取り扱っていない上に、あった!
光量の計測になるから物体の色と形によって検出条件が変わってしまうようなのでちょっと却下かなぁ。

そんなEOPDセンサーの紹介でした。
そういえば埼玉ノードで外光の影響を受けないからって
ライトセンサーの代わりにEOPD使ってるチームがいたなぁ。
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
・NXT気圧センサー
(^・ω・)ノRadiumProduction in RoboCup Junior
HiTechnic社製の光距離センサー、通称EOPDセンサーです。
光を出して、その反射量、反射角からセンサーの前の物体までの距離を検出します。
光を出す、という点では従来のライトセンサーと同じですが、従来のライトセンサーと違って、
外部光、つまり、センサーから出た光以外はフィルターでシャットアウトして検出しないようになっているので
周りが明るかろうが、暗かろうが、関係なしに正確に物体までの距離を検出できます。
しかし、正確に測定できる限界は20㎝程のようですね。「正確」の基準がよくわかりませんが。
単純に距離だけが微妙に実際とズレる程度で検出はちゃんと行うのでしょうか?
それとも検出そのものがうまくできないのでしょうか?その辺りの記載が無い当たりちょっと不親切ですね。
「買って確かめろ」ってことでしょうか?
検出距離に関しましては標準レンジとロングレンジという2つのレンジがあり、
ロングにすると標準の約4倍の距離の検出ができるようになるようです。
これ検出距離が80㎝になるってこと?
それとも標準レンジだと5㎝が限界ってこと?
後者の場合、光距離センサーとしてかなり致命的な気もしますが・・・
あとインターフェイスはアナログとなっています。他のセンサーとの併用も可能です。
使ってみたいような気もしますが、うちの学校では恐らく取り扱っていない上に、あった!
光量の計測になるから物体の色と形によって検出条件が変わってしまうようなのでちょっと却下かなぁ。
そんなEOPDセンサーの紹介でした。
そういえば埼玉ノードで外光の影響を受けないからって
ライトセンサーの代わりにEOPD使ってるチームがいたなぁ。
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
・NXT気圧センサー
(^・ω・)ノRadiumProduction in RoboCup Junior
さて、今日は、以前紹介したコンデンサについての続きで、
コンデンサの色んな種類。これについて詳しく説明していこうと思います。
まずはこれ。

アルミ電解コンデンサ、通称「電解」です。電解コンデンサ、とか、電解コン、とか電コン、アル電、アルコン・・・
まぁそんな感じで呼ばれています。
電子工作をやる上では、一番一般的なコンデンサですね。
ふつーにふつーのコンデンサです。容量と最大定格電圧は横のところにわかりやすく書いてあります。
あと、このコンデンサには極性があり、

白い帯のある方がマイナス、となっています。あと特徴としてはマイナスの方が端子線が短いです。
まぁ誰かが一度使ってプラスの方が途中で切られている場合は当然プラスの方が短くなりますから
線の長さで判断するのは控えた方がいいでしょう。
容量は大体0.1μF~10000μFぐらいでしょうか。たまにでかいのありますけど・・・
定格電圧は大体10V ~500V ぐらいまでのものを見かけます。
それ以上の定格のものを頼むと、なんかバズーカー砲みたいなのが出てきますので注意してください。
容量の単位等に関しましては、次回説明します。
次は積層セラミックコンデンサです。

通称「セラコン」です。セラミックコンデンサというコンデンサは別にあるので注意してください。
何故「積層」がつくかというのはコンデンサの物理的な構成が関係しています。が、
この辺の説明めんどくさいので割愛します。
極性はありませんのでテキトーにつけて頂いて結構です。←
容量に関しましては記載がありますが(読み方に関しましては次回説明すると思います)
基本的に定格電圧については記載がありません。でもデータシートを読むと、
一般的なセラコンは大体25Vか50Vですね。たまに定格電圧が低いものがあるので気を付けてください。
容量は大体10pF~10μFくらいのものをみかけます。
基本的にロボカップジュニアなどで使う電子回路ではこの2種類しか使用しませんね。
後他の種類も少し紹介して終ろうと思います。
電解2重層コンデンサ

容量がアホみたいに大きいコンデンサです。ちょっとした充電池みたいなものっでしょうか。
その代り定格電圧がアホみたいに低いですね。極性についてはアル電と同じです。
最近では「電気2重層コンデンサ」ともいうそうです。
固体コンデンサ
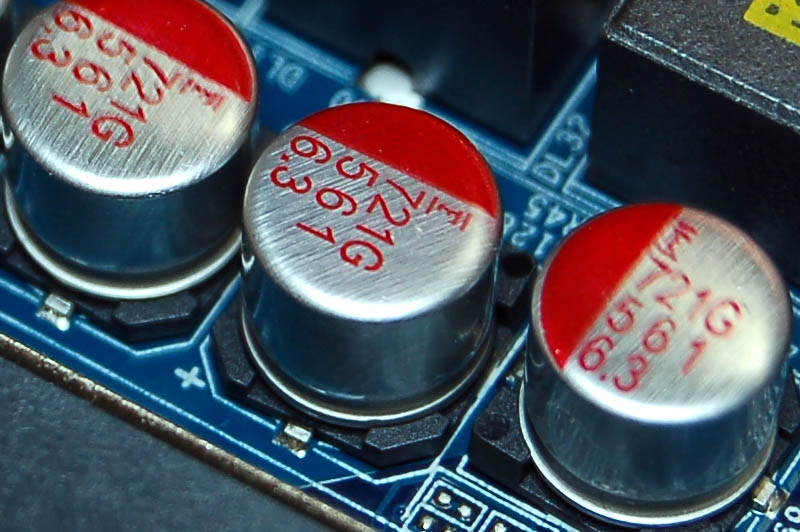
通常のコンデンサは中に電解液という液体が入っているのですがこれはその電解液が固体になっています。
PCによく搭載されていて、簡単にいうと性能がものすごく高いです。
でも、基本的に使い方はアル電と同じです。
かといってロボカップジュニアでこれを使うのはちょっと無意味かなぁ。って感じの品物です。
マイラコンデンサ

名称のところどころに長音(ー)がはいっていたりしますが、全部これのことと考えて大丈夫です。
電解2重層と逆で容量は少ないけど定格電圧はものすごい、って感じのコンデンサです。
この前フィルムコンデンサと云って紹介したので混乱する人もいるかと思いますが、
マイラコンデンサは「フィルムコンデンサの中の種類」です。
極性はなく、また、高周波にも対応しています。
チップコンデンサ

アル電やセラコンがちっちゃくなったものと考えて大丈夫です、
ちっちゃいのでスぺースを取りません。
mp3プレイヤーや携帯電話などの小型電子機器に多くつかわれています。
個人的にはコンデンサはこれに乗り換えようと、今頑張ってたりします。
とりあえずこのぐらいでしょうか。まだまだコンデンサにはいろんな種類がありますが、
紹介していくとキリがありませんのでこの辺で終了します。
次はコンデンサの容量ついてとその他もろもろ(使い方とか?)について説明していこうと考えています。
にしても東京都が災害救助法の適応を受けてるなんて信じられないなぁ・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
コンデンサの色んな種類。これについて詳しく説明していこうと思います。
まずはこれ。
アルミ電解コンデンサ、通称「電解」です。電解コンデンサ、とか、電解コン、とか電コン、アル電、アルコン・・・
まぁそんな感じで呼ばれています。
電子工作をやる上では、一番一般的なコンデンサですね。
ふつーにふつーのコンデンサです。容量と最大定格電圧は横のところにわかりやすく書いてあります。
あと、このコンデンサには極性があり、
白い帯のある方がマイナス、となっています。あと特徴としてはマイナスの方が端子線が短いです。
まぁ誰かが一度使ってプラスの方が途中で切られている場合は当然プラスの方が短くなりますから
線の長さで判断するのは控えた方がいいでしょう。
容量は大体0.1μF~10000μFぐらいでしょうか。たまにでかいのありますけど・・・
定格電圧は大体10V ~500V ぐらいまでのものを見かけます。
それ以上の定格のものを頼むと、なんかバズーカー砲みたいなのが出てきますので注意してください。
容量の単位等に関しましては、次回説明します。
次は積層セラミックコンデンサです。
通称「セラコン」です。セラミックコンデンサというコンデンサは別にあるので注意してください。
何故「積層」がつくかというのはコンデンサの物理的な構成が関係しています。が、
この辺の説明めんどくさいので割愛します。
極性はありませんのでテキトーにつけて頂いて結構です。←
容量に関しましては記載がありますが(読み方に関しましては次回説明すると思います)
基本的に定格電圧については記載がありません。でもデータシートを読むと、
一般的なセラコンは大体25Vか50Vですね。たまに定格電圧が低いものがあるので気を付けてください。
容量は大体10pF~10μFくらいのものをみかけます。
基本的にロボカップジュニアなどで使う電子回路ではこの2種類しか使用しませんね。
後他の種類も少し紹介して終ろうと思います。
電解2重層コンデンサ
容量がアホみたいに大きいコンデンサです。ちょっとした充電池みたいなものっでしょうか。
その代り定格電圧がアホみたいに低いですね。極性についてはアル電と同じです。
最近では「電気2重層コンデンサ」ともいうそうです。
固体コンデンサ
通常のコンデンサは中に電解液という液体が入っているのですがこれはその電解液が固体になっています。
PCによく搭載されていて、簡単にいうと性能がものすごく高いです。
でも、基本的に使い方はアル電と同じです。
かといってロボカップジュニアでこれを使うのはちょっと無意味かなぁ。って感じの品物です。
マイラコンデンサ
名称のところどころに長音(ー)がはいっていたりしますが、全部これのことと考えて大丈夫です。
電解2重層と逆で容量は少ないけど定格電圧はものすごい、って感じのコンデンサです。
この前フィルムコンデンサと云って紹介したので混乱する人もいるかと思いますが、
マイラコンデンサは「フィルムコンデンサの中の種類」です。
極性はなく、また、高周波にも対応しています。
チップコンデンサ
アル電やセラコンがちっちゃくなったものと考えて大丈夫です、
ちっちゃいのでスぺースを取りません。
mp3プレイヤーや携帯電話などの小型電子機器に多くつかわれています。
個人的にはコンデンサはこれに乗り換えようと、今頑張ってたりします。
とりあえずこのぐらいでしょうか。まだまだコンデンサにはいろんな種類がありますが、
紹介していくとキリがありませんのでこの辺で終了します。
次はコンデンサの容量ついてとその他もろもろ(使い方とか?)について説明していこうと考えています。
にしても東京都が災害救助法の適応を受けてるなんて信じられないなぁ・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
本来なら今日が関東ブロックの当日でしたね。
この時間だと、既に結果が決まっていて・・・どうなっていたんでしょう。
ところが地震の影響で延長。会場も開始日時も公式発表は無いままです。
東東京ノードが4月10日にあり、ジャパンオープンがGWにあることから、
4月17日か24日になるのは、まず間違いないと思うのですが・・・。
ま、公式発表を待ちましょう。
今日紹介するセンサーは此方。

O2Gasセンサー。つまりは酸素センサーといったところでしょうか。
空気中の酸素濃度を測定することができるセンサーです。
人の呼吸も検知することができるらしいので、
もしかしたら本当の災害現場のほうで活躍するようなレスキューロボット制作ができるかもしれませんね。
只、基本的にはCO2センサーとセットで使うもののようです。

でもCO2の方の方の説明にはO2と併用とは書かれていない上、
O2の方にCO2の補完で使用してください。みたいな文章があったので、
基本的にはO2センサー単体では使いようがない・・のかな?
2つ揃って計測して初めて「信用できるデータ」となるんでしょうね。
まぁそんな感じのO2センサーとCO2センサーでした。
因みに値段はO2で2万くらい、CO2で3万弱くらいかな?結構しますね。
(^・ω・)ノRadiumProduction in RoboCupJunior
この時間だと、既に結果が決まっていて・・・どうなっていたんでしょう。
ところが地震の影響で延長。会場も開始日時も公式発表は無いままです。
東東京ノードが4月10日にあり、ジャパンオープンがGWにあることから、
4月17日か24日になるのは、まず間違いないと思うのですが・・・。
ま、公式発表を待ちましょう。
今日紹介するセンサーは此方。
O2Gasセンサー。つまりは酸素センサーといったところでしょうか。
空気中の酸素濃度を測定することができるセンサーです。
人の呼吸も検知することができるらしいので、
もしかしたら本当の災害現場のほうで活躍するようなレスキューロボット制作ができるかもしれませんね。
只、基本的にはCO2センサーとセットで使うもののようです。
でもCO2の方の方の説明にはO2と併用とは書かれていない上、
O2の方にCO2の補完で使用してください。みたいな文章があったので、
基本的にはO2センサー単体では使いようがない・・のかな?
2つ揃って計測して初めて「信用できるデータ」となるんでしょうね。
まぁそんな感じのO2センサーとCO2センサーでした。
因みに値段はO2で2万くらい、CO2で3万弱くらいかな?結構しますね。
(^・ω・)ノRadiumProduction in RoboCupJunior
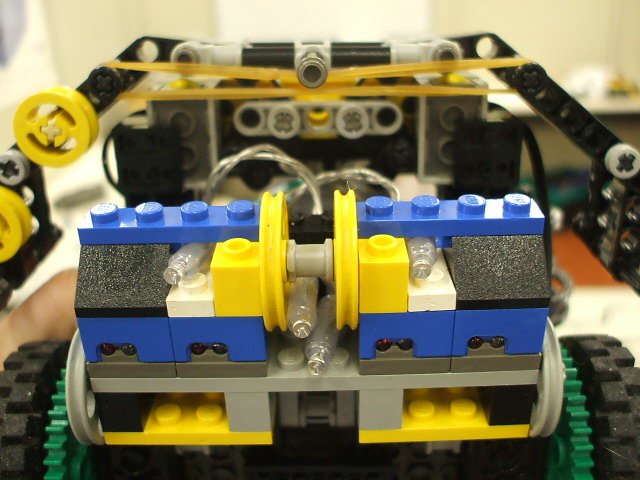
今日は方位センサーの紹介です。
でもレゴの方位センサーではありませんよ。まったく違う方位センサーです。

サッカーではもうお馴染みですよね。Radium機にも搭載されています。
この方位センサーですが、どのようになっているかといいますと、
電源の2本のほかに信号線を3本利用していて
8方位を検出することができます。
3本の信号でデジタル信号となっているので
1本目 2本目 3本目
OFF OFF OFF
ON OFF OFF
OFF ON OFF
ON ON OFF
OFF OFF ON
ON OFF ON
OFF ON ON
ON ON ON
という8パターンの信号の出力ができ、この8パターンの信号は方位によって変わるので
この3本の信号を全てONかOFFか調べることで
センサーが8つの方向の中で、どの方向を向いているかを測定することができます。
だから簡単にすると、処理的にはタッチセンサーが3つあってどことどこがONだったらこの方位だね。
って感じの制御になります。
動作する電圧は5VなのでLEGOでも普通に使えますが、そのまま使うと3ポート使用しまうことになるので
そこら辺はよく考えて使った方がいいと思います。
NXTで方位センサーが出てしまったからLEGOで今更使う意味はないかな?
でも半導体素子のみのセンサーなので、他の方位センサーよりは磁場の影響が少なくなると思います。
自作で方位センサーを使ってみようと思っている方は是非使ってみてください。
デジタル制御は簡単ですから初心者にはオススメですよ♪
只このセンサーちょっとだけはんだつけが難しいのと、
無温無臭でお亡くなりになることが、たまにあるので気を付けてください。
(^・ω・)ノRadiumProduction in RoboCupJunior
でもレゴの方位センサーではありませんよ。まったく違う方位センサーです。
サッカーではもうお馴染みですよね。Radium機にも搭載されています。
この方位センサーですが、どのようになっているかといいますと、
電源の2本のほかに信号線を3本利用していて
8方位を検出することができます。
3本の信号でデジタル信号となっているので
1本目 2本目 3本目
OFF OFF OFF
ON OFF OFF
OFF ON OFF
ON ON OFF
OFF OFF ON
ON OFF ON
OFF ON ON
ON ON ON
という8パターンの信号の出力ができ、この8パターンの信号は方位によって変わるので
この3本の信号を全てONかOFFか調べることで
センサーが8つの方向の中で、どの方向を向いているかを測定することができます。
だから簡単にすると、処理的にはタッチセンサーが3つあってどことどこがONだったらこの方位だね。
って感じの制御になります。
動作する電圧は5VなのでLEGOでも普通に使えますが、そのまま使うと3ポート使用しまうことになるので
そこら辺はよく考えて使った方がいいと思います。
NXTで方位センサーが出てしまったからLEGOで今更使う意味はないかな?
でも半導体素子のみのセンサーなので、他の方位センサーよりは磁場の影響が少なくなると思います。
自作で方位センサーを使ってみようと思っている方は是非使ってみてください。
デジタル制御は簡単ですから初心者にはオススメですよ♪
只このセンサーちょっとだけはんだつけが難しいのと、
無温無臭でお亡くなりになることが、たまにあるので気を付けてください。
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(06/08)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
プロフィール
HN:
Luz
性別:
男性
アーカイブ