RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
大会前の トラブル。いつも通りですね。大会前1週間ほどから何かしら起こるのが定番ですよね。
今回のトラブルは「ロボットの2階プログラムが完全に動かない」です。
こういう時って大抵動かない部分の変更は一切行っていないから厄介なんです。
どっかの変更がこの惨事を誘発したと考えるのが妥当ですが、そこがどこだか皆目見当がつかない。
こんな感じになるわけですね。いつも(笑)
東東京ノードの時はこれが当日に起きたから死亡しました。
まぁ今回の場合、当日ではないのでよかったかな・・・というところです。
さてと、ひさびさに大会前から冷や汗書くような展開となって参りました。
間に合うかな・・・(汗)
(^・ω・)ノRadiumProduction in RoboCupJunior
今回のトラブルは「ロボットの2階プログラムが完全に動かない」です。
こういう時って大抵動かない部分の変更は一切行っていないから厄介なんです。
どっかの変更がこの惨事を誘発したと考えるのが妥当ですが、そこがどこだか皆目見当がつかない。
こんな感じになるわけですね。いつも(笑)
東東京ノードの時はこれが当日に起きたから死亡しました。
まぁ今回の場合、当日ではないのでよかったかな・・・というところです。
さてと、ひさびさに大会前から冷や汗書くような展開となって参りました。
間に合うかな・・・(汗)
(^・ω・)ノRadiumProduction in RoboCupJunior
関東ブロックまであとちょっとですね。
そろそろスパートかけなきゃ。今までロボコンの会議とかもあったので
ノード以来平日はまともに活動してないんですよね ・・・
その関東ブロックのスケジュールが発表されました。
受け付けは8時、試合開始は13時ですね。ノードより30分早いです><。
まぁブロック大会ですから、仕方ないのでしょうけど・・・
とりあえず今日はそんな話とは全く関係のない」。センサーの紹介の話です。
今日紹介するセンサーは此方。

圧電ジャイロモジュール。所謂ジャイロセンサーです。
カメラの手振れ補正とか、コレに搭載されていますね。
どういうものかというと、基本的に「角速度」を検出するものです。
角速度って何?という話は恐らく中学の物理で習うでしょう。きっと。
単位時間当たりの回転角度を示す量というのが定義ですが、その辺を詳しくここで説明していくと
僕のロボットで遊ぶ時間が消えるので割愛させていただきます(笑)
まぁ簡単なことを言うと「回転速度」みたいなものです。ちょっと違うような気もするけど。
まぁそんな感じのものです。
それで、その「角速度」を検知するセンサーが上の基盤には2つ搭載されています。
つまり2軸のジャイロセンサーという訳です。
因みに出力はアナログなので簡単ですよ。一度試せばわか・・・らないかも(汗)
結構用途限定されますからね。使いようによっては方位センサーや加速度センサーの代わりになってくれますけど・・・
まぁ興味のある方は一度使ってみるといいかも知れません。
という訳で今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
そろそろスパートかけなきゃ。今までロボコンの会議とかもあったので
ノード以来平日はまともに活動してないんですよね ・・・
その関東ブロックのスケジュールが発表されました。
受け付けは8時、試合開始は13時ですね。ノードより30分早いです><。
まぁブロック大会ですから、仕方ないのでしょうけど・・・
とりあえず今日はそんな話とは全く関係のない」。センサーの紹介の話です。
今日紹介するセンサーは此方。
圧電ジャイロモジュール。所謂ジャイロセンサーです。
カメラの手振れ補正とか、コレに搭載されていますね。
どういうものかというと、基本的に「角速度」を検出するものです。
角速度って何?という話は恐らく中学の物理で習うでしょう。きっと。
単位時間当たりの回転角度を示す量というのが定義ですが、その辺を詳しくここで説明していくと
僕のロボットで遊ぶ時間が消えるので割愛させていただきます(笑)
まぁ簡単なことを言うと「回転速度」みたいなものです。ちょっと違うような気もするけど。
まぁそんな感じのものです。
それで、その「角速度」を検知するセンサーが上の基盤には2つ搭載されています。
つまり2軸のジャイロセンサーという訳です。
因みに出力はアナログなので簡単ですよ。一度試せばわか・・・らないかも(汗)
結構用途限定されますからね。使いようによっては方位センサーや加速度センサーの代わりになってくれますけど・・・
まぁ興味のある方は一度使ってみるといいかも知れません。
という訳で今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
そしてジャパンオープンまで2週間。
今までにないハードなスケジュールですね。
しかも2012年度の東東京ノードまでも、実は7か月しかありません。
すごい状況ですね。今年のロボカップジュニアは大忙しです。
因みにイスタンブールまではあと2か月半というところでしょうか。ここからイスタンブールも意外と短いですね。
そんな感じのロボカップ部は東東京ノード大会、どうなったかといいますと・・・
4チームがまず参加しました。サッカーオープンA2チームにレスキューA2チームです。
まずはサッカーオープンA、とりあえず先輩チームのGenesisが新3年チームのAldehydeを破って優勝。
両チームともに関東ブロックへの推薦枠を手にしましたが、Aldehydeチームのロボットの損傷が激しく、
2週間での修繕は不可と判断し、関東ブロックへの参加を辞退しました。
よってGenesisのみが関東ブロックに出場することになります。
次にレスキューA
とりあえず。僕、Luzがぎりっぎりで関東ブロックに出場することになりました。
まぁその辺のことは前記事を参照してください。
もう1チームのTAKUMIは最初のバンプでつまずき7位。関東ブロックへの出場は上から6チームだったので
ギリギリでノード通過ならずといった状況になってしまいました。(前回ジャパンオープン4位なのに・・・)
という訳で4チーム中2チームが来週埼玉大学で開催される関東ブロックに出場することになります。
また、新一年生(入部はしていません)の中で最低でもレスキューAで1チーム。
また、サッカーライトウェイトセカンダリの方でも1チーム関東ブロックへ出場する人がいることがわかっています。
という訳で事実上産技高専生からは4チームが関東ブロックに出場することになりました。
さて、この4チームの中から何チームがジャパンオープン、そして世界大会へと進むことができるでしょうか・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
今までにないハードなスケジュールですね。
しかも2012年度の東東京ノードまでも、実は7か月しかありません。
すごい状況ですね。今年のロボカップジュニアは大忙しです。
因みにイスタンブールまではあと2か月半というところでしょうか。ここからイスタンブールも意外と短いですね。
そんな感じのロボカップ部は東東京ノード大会、どうなったかといいますと・・・
4チームがまず参加しました。サッカーオープンA2チームにレスキューA2チームです。
まずはサッカーオープンA、とりあえず先輩チームのGenesisが新3年チームのAldehydeを破って優勝。
両チームともに関東ブロックへの推薦枠を手にしましたが、Aldehydeチームのロボットの損傷が激しく、
2週間での修繕は不可と判断し、関東ブロックへの参加を辞退しました。
よってGenesisのみが関東ブロックに出場することになります。
次にレスキューA
とりあえず。僕、Luzがぎりっぎりで関東ブロックに出場することになりました。
まぁその辺のことは前記事を参照してください。
もう1チームのTAKUMIは最初のバンプでつまずき7位。関東ブロックへの出場は上から6チームだったので
ギリギリでノード通過ならずといった状況になってしまいました。(前回ジャパンオープン4位なのに・・・)
という訳で4チーム中2チームが来週埼玉大学で開催される関東ブロックに出場することになります。
また、新一年生(入部はしていません)の中で最低でもレスキューAで1チーム。
また、サッカーライトウェイトセカンダリの方でも1チーム関東ブロックへ出場する人がいることがわかっています。
という訳で事実上産技高専生からは4チームが関東ブロックに出場することになりました。
さて、この4チームの中から何チームがジャパンオープン、そして世界大会へと進むことができるでしょうか・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
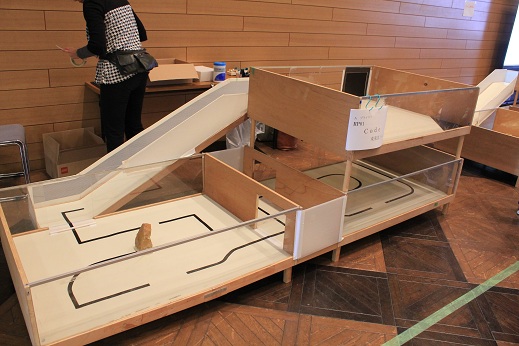
関東ブロックレスキューAルール
フィールドは一応高専のものらしいのですが、僕も初めて見ました。
まず、フィールドには入口がありませんね。あと坂までの壁が10㎝となっています。
あと2階の壁が半透明ですね。でもこれだと外からは競技が見えないし、中のロボットはセンサー誤作動するしで
あんまりいいように思えないのは僕だけでしょうか?
どうせなら透明にしましょうよ~。中途半端ヨクナイ←
でも一応ロボットはかろうじて見えるのかな?そこらへんはよくわかりません。
あと1階の床が会場の床に設置しているので、フィールドを置く場所を考えないと
床下からの磁場の影響を受けやすくなってしまいますね。
まぁそこは競技者が対応すべきところなのでしょうが・・・
注意すべき点はこれくらいでしょうか。まぁ以前のフィールドのように意地悪な壁配置がないので
その点はよかったと思っています。
只、部屋の大きさについての記載がないので実際にどれくらいの大きさなのかがよくわかりませんね。
特に坂と廊下の幅。30㎝だと嬉しいのですが・・・
因みにこのフィールドを見た時の僕の一番最初の感想は
「あっ、良かった。運びやすそう。」です。
今までのフィールドは木製で重くて運ぶの大変だったんですよ・・・コレ↓
といいうわけで今日の記事は終了です。
新しいフィールドでの競技、楽しみにしています。
(^・ω・)ノRadiumProduction in RoboCupJunior
フィールドは一応高専のものらしいのですが、僕も初めて見ました。
まず、フィールドには入口がありませんね。あと坂までの壁が10㎝となっています。
あと2階の壁が半透明ですね。でもこれだと外からは競技が見えないし、中のロボットはセンサー誤作動するしで
あんまりいいように思えないのは僕だけでしょうか?
どうせなら透明にしましょうよ~。中途半端ヨクナイ←
でも一応ロボットはかろうじて見えるのかな?そこらへんはよくわかりません。
あと1階の床が会場の床に設置しているので、フィールドを置く場所を考えないと
床下からの磁場の影響を受けやすくなってしまいますね。
まぁそこは競技者が対応すべきところなのでしょうが・・・
注意すべき点はこれくらいでしょうか。まぁ以前のフィールドのように意地悪な壁配置がないので
その点はよかったと思っています。
只、部屋の大きさについての記載がないので実際にどれくらいの大きさなのかがよくわかりませんね。
特に坂と廊下の幅。30㎝だと嬉しいのですが・・・
因みにこのフィールドを見た時の僕の一番最初の感想は
「あっ、良かった。運びやすそう。」です。
今までのフィールドは木製で重くて運ぶの大変だったんですよ・・・コレ↓
といいうわけで今日の記事は終了です。
新しいフィールドでの競技、楽しみにしています。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日はセンサーの紹介です。
今日紹介するのはレスキューというより、サッカーチャレンジの方で使えそうなセンサーですね。

IRSeekerV2というセンサーです。
IRSeekerというと日本語で赤外線探査機といった感じでしょうか。
要するに可視光(目に見える光)はシャットアウトして赤外線だけを検出するように作られたセンサーです。
他のライトセンサーと比べて格段に視野が広く(235°)、しかも中に5つのIRセンサーが入っていて
そのセンサーのどれが反応しているかで、
ボールの距離だけでなく、ボールのある方向(9分割)を検知することができるセンサーです。
すごく便利なセンサーですが、問題点もいくつかあります。
・動作速度が遅い。
・ROBOLAB等の一部ソフトは未対応
まぁNXTソフトウェアの2.0なら対応しているのでプログラムの初心者にはおススメのセンサーかも知れません。
でもこれ、大会ルールで使用規制されてるんじゃないかな・・・?レスキューのラインリーダーと同じように・・・
まぁ使用する際はその辺りを確認していただけるとよろしいかと思います。
ではでは~
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCupJunior
今日紹介するのはレスキューというより、サッカーチャレンジの方で使えそうなセンサーですね。
IRSeekerV2というセンサーです。
IRSeekerというと日本語で赤外線探査機といった感じでしょうか。
要するに可視光(目に見える光)はシャットアウトして赤外線だけを検出するように作られたセンサーです。
他のライトセンサーと比べて格段に視野が広く(235°)、しかも中に5つのIRセンサーが入っていて
そのセンサーのどれが反応しているかで、
ボールの距離だけでなく、ボールのある方向(9分割)を検知することができるセンサーです。
すごく便利なセンサーですが、問題点もいくつかあります。
・動作速度が遅い。
・ROBOLAB等の一部ソフトは未対応
まぁNXTソフトウェアの2.0なら対応しているのでプログラムの初心者にはおススメのセンサーかも知れません。
でもこれ、大会ルールで使用規制されてるんじゃないかな・・・?レスキューのラインリーダーと同じように・・・
まぁ使用する際はその辺りを確認していただけるとよろしいかと思います。
ではでは~
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCupJunior
昨日、今年のロボットの 紹介をしたら、アクセス数が鰻上りになったのですが、どういうことなのでしょうか(笑)
一日だけ頭2つ分くらい飛び出てる・・・。
今日は健康診断がありました。
うちの学校の健康診断、実はとっても人気があって、診断してもらうのにもすごく時間がかかるんですよ。
今年なんか眼科の診察をするだけで2時間待ちでした。某津波に沈んだ夢の国のアトラクションに等しい人気っぷりですね。
明日から営業再開とか言ってましたが、どうなってるんだろう・・・電気無駄使いするな!
そんなこんなで健康診断も終了し、いつも通り部活をしたのですが・・・
一年生が結構見学にくるんですよね。なんだかんだで。
それで、僕がとりあえずそんな一年生に言ってること。
「ロボコンやらない!?」
実は今、ロボコンは圧倒的な部員不足で廃部の危機(でもないけど)に立たされています。
・・・というより機械作業ができる人がいないのです。回路だけどんどん増えちゃって・・・
機械は何故か入ってすぐやめる子が多いんですよね。きっと指導体制なんだろうなぁ・・・。
とりあえず機械班がないないと今年のロボットが作れないのでまじでロボコン機械入ってくださいm( _ _)m
ロボカップは・・・とりあえず程々に(笑)
今ロボカップに欲しいものは新入部員よりもお金と場所と暖房器具です。
部員はその後かな・・・(オイ)
(^・ω・)ノRadiumProduction in RoboCupJunior
一日だけ頭2つ分くらい飛び出てる・・・。
今日は健康診断がありました。
うちの学校の健康診断、実はとっても人気があって、診断してもらうのにもすごく時間がかかるんですよ。
今年なんか眼科の診察をするだけで2時間待ちでした。某津波に沈んだ夢の国のアトラクションに等しい人気っぷりですね。
明日から営業再開とか言ってましたが、どうなってるんだろう・・・電気無駄使いするな!
そんなこんなで健康診断も終了し、いつも通り部活をしたのですが・・・
一年生が結構見学にくるんですよね。なんだかんだで。
それで、僕がとりあえずそんな一年生に言ってること。
「ロボコンやらない!?」
実は今、ロボコンは圧倒的な部員不足で廃部の危機(でもないけど)に立たされています。
・・・というより機械作業ができる人がいないのです。回路だけどんどん増えちゃって・・・
機械は何故か入ってすぐやめる子が多いんですよね。きっと指導体制なんだろうなぁ・・・。
とりあえず機械班がないないと今年のロボットが作れないのでまじでロボコン機械入ってくださいm( _ _)m
ロボカップは・・・とりあえず程々に(笑)
今ロボカップに欲しいものは新入部員よりもお金と場所と暖房器具です。
部員はその後かな・・・(オイ)
(^・ω・)ノRadiumProduction in RoboCupJunior
関東ブロック公式HPで、 関東ブロックの開催についての案内が更新されました。
まぁこれによると開催日時は4月の24日。
開催場所は埼玉大学となっています。
会場となる建物は大学側からの要望で各チャレンジごとにバラバラになっていて、
要するに埼玉ノード大会のような感じになるのでしょうね。
とりあえず、これで確定のようなので、参加するチームは間違えて群馬大学にいかないように・・・(ないか。)
震災で一時はどうなることかと思いましたが、無事開催ができるようになりましたね。
運営スタッフおよびその関係者の皆様、ありがとうございます。
さて。勝てるかな・・・(汗)
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s:今福島の上空にUFOがいる!という噂が流れているようなので外を見てみたら
確かに福島の方向、北東の20~30度くらいの位置に3色に光る回転体が
とんでもない動きをしながら旋回しているのが確認できました。
赤青緑の3色の光が飛行物体の3方向についているようなので動き、向きなどがよくわかります。
しかもここ、東京から裸眼で見えるレベルの明るさです。
確かにあんな3次元方向に自在に移動することができる気持ち悪い米空軍のヘリがこの前一般公開されましたが・・・
あんな速い速度で動けるのでしょうか?
しかも、確か福島までは200㎞以上離れています。
ヘリって・・・そんな遠くから見えるの?
気になる方は今すぐ外へ出て、福島の方を眺めてみてください。
UFOかどうかは別として、確実になにかあそこにいます。
こんな動画みつけました。これはちょっとインチキくさい・・・(笑)
でわでわ
まぁこれによると開催日時は4月の24日。
開催場所は埼玉大学となっています。
会場となる建物は大学側からの要望で各チャレンジごとにバラバラになっていて、
要するに埼玉ノード大会のような感じになるのでしょうね。
とりあえず、これで確定のようなので、参加するチームは間違えて群馬大学にいかないように・・・(ないか。)
震災で一時はどうなることかと思いましたが、無事開催ができるようになりましたね。
運営スタッフおよびその関係者の皆様、ありがとうございます。
さて。勝てるかな・・・(汗)
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s:今福島の上空にUFOがいる!という噂が流れているようなので外を見てみたら
確かに福島の方向、北東の20~30度くらいの位置に3色に光る回転体が
とんでもない動きをしながら旋回しているのが確認できました。
赤青緑の3色の光が飛行物体の3方向についているようなので動き、向きなどがよくわかります。
しかもここ、東京から裸眼で見えるレベルの明るさです。
確かにあんな3次元方向に自在に移動することができる気持ち悪い米空軍のヘリがこの前一般公開されましたが・・・
あんな速い速度で動けるのでしょうか?
しかも、確か福島までは200㎞以上離れています。
ヘリって・・・そんな遠くから見えるの?
気になる方は今すぐ外へ出て、福島の方を眺めてみてください。
UFOかどうかは別として、確実になにかあそこにいます。
こんな動画みつけました。これはちょっとインチキくさい・・・(笑)
でわでわ
今回は、今年のロボットの紹介です。
今年のロボットはなんというか・・・
「遊んでみた」がテーマになっています。(きっと)
まぁどういうことかというと、今まで使ってなかったものを取り入れつつ、動けるロボットを作ろうというものですね。
結局その「今までなかったもの」が格段に多かったので、結果「遊んでみた。」になった訳ですが・・・
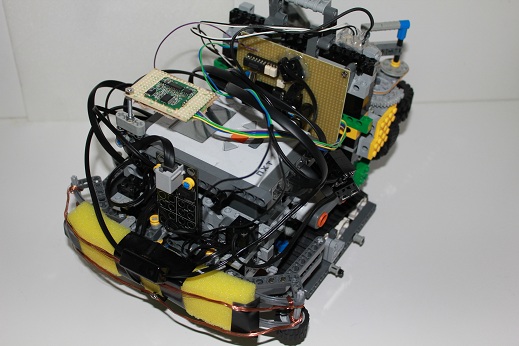
結果、こんな化け物が生まれることに(笑)
無茶苦茶に色々ついています。センサーの合計は17個・・・かな?
今回初投入したものというのは
・NXT
・I2C通信
・通電センサー
・超音波センサー
・加速度センサー
・串除けの囲い
・缶を持ち上げる気持ち悪いタイヤ機構
・意味不明なロジック積んだ基盤
・ポートマルチプレクサー
ETC・・・
といった感じです。非常に多いですね。いくらルールが変わったからとはいえ・・・
また、リレーによるセンサー切り替え(2009)、や坂タッチセンサー(2006)、クローラー駆動(2005)等、
過去に使用したシステムを再利用するケースも多かったです。
とにかく、今までのロボットの中では一番複雑なロボットだったことは間違いないと思います。
まぁセンサーの数の時点で、既にわかってることなんですけど(笑)
ライトセンサーなんか結局5個ですよ。まだ増えるかもしれません(笑)
しかも、ロボットが大体30㎝と比較的大きいので、
学校ではライントレースしてると、よくアリーナの壁にぶつかっていました。
なのでその対策を・・・なんて考えていたらバンプができないことが発覚して修正・・・
なんてことを繰り返しているうちに本番当日。
案の定調整が間に合わず、進行停止を4回もしてしまいました。まぁ缶までの課題は全てとったんだけど・・・
でも缶は持ちあがらず、結局そのまま8分間動かして時間切れでした。
うーん。やっぱり複雑すぎたか。もっと単純にした方がいいのかもしれません。
関東までになんとかしないと・・・まぁ。2週間しかありませんから(あと11日)余り大きいことはできませんね。
そんな感じで今日は今年のロボットの紹介でした。
あと、東東京ノードのロボット紹介は当日のカメラ忘れの都合により中止とさせていただきました。
(^・ω・)ノRadiumProduction in RoboCupJunior
今年のロボットはなんというか・・・
「遊んでみた」がテーマになっています。(きっと)
まぁどういうことかというと、今まで使ってなかったものを取り入れつつ、動けるロボットを作ろうというものですね。
結局その「今までなかったもの」が格段に多かったので、結果「遊んでみた。」になった訳ですが・・・
結果、こんな化け物が生まれることに(笑)
無茶苦茶に色々ついています。センサーの合計は17個・・・かな?
今回初投入したものというのは
・NXT
・I2C通信
・通電センサー
・超音波センサー
・加速度センサー
・串除けの囲い
・缶を持ち上げる気持ち悪いタイヤ機構
・意味不明なロジック積んだ基盤
・ポートマルチプレクサー
ETC・・・
といった感じです。非常に多いですね。いくらルールが変わったからとはいえ・・・
また、リレーによるセンサー切り替え(2009)、や坂タッチセンサー(2006)、クローラー駆動(2005)等、
過去に使用したシステムを再利用するケースも多かったです。
とにかく、今までのロボットの中では一番複雑なロボットだったことは間違いないと思います。
まぁセンサーの数の時点で、既にわかってることなんですけど(笑)
ライトセンサーなんか結局5個ですよ。まだ増えるかもしれません(笑)
しかも、ロボットが大体30㎝と比較的大きいので、
学校ではライントレースしてると、よくアリーナの壁にぶつかっていました。
なのでその対策を・・・なんて考えていたらバンプができないことが発覚して修正・・・
なんてことを繰り返しているうちに本番当日。
案の定調整が間に合わず、進行停止を4回もしてしまいました。まぁ缶までの課題は全てとったんだけど・・・
でも缶は持ちあがらず、結局そのまま8分間動かして時間切れでした。
うーん。やっぱり複雑すぎたか。もっと単純にした方がいいのかもしれません。
関東までになんとかしないと・・・まぁ。2週間しかありませんから(あと11日)余り大きいことはできませんね。
そんな感じで今日は今年のロボットの紹介でした。
あと、東東京ノードのロボット紹介は当日のカメラ忘れの都合により中止とさせていただきました。
(^・ω・)ノRadiumProduction in RoboCupJunior
ちょうど100記事目ですね。
区切りがいいから何か面白いことでもしようかとも思いましたが、特に思いつかなかったのでいつも通りの記事です。
バーニアのセンサーの紹介です。
今日紹介するのは

Salinity Sensorです。
日本語にすると「塩分センサー」要するに液体中の塩分濃度を測定するセンサーです。
ようするに水の中に入れておいてその水の塩分濃度を測るモノという訳ですね。腐食しそう・・・(笑)
海や汽水域の塩分濃度を測ったり、
あとは水の中の塩分濃度による浮力の違いなどを調査するのに使えるよー。とのことですが、
それ測ってどうするの?
あくまで「教材としての」センサーという訳ですね。実用的な用途はかなり限定されると思います。
ちょっと用途が少ないというのは残念ですね。
イヤ、レスキュー競技がこのセンサーがないとできなくなる!とかいうのも困りますけど・・・
まぁそんな感じで今日はこの辺でおわりです。
(^・ω・)ノRadiumProduction in RoboCupJunior
区切りがいいから何か面白いことでもしようかとも思いましたが、特に思いつかなかったのでいつも通りの記事です。
バーニアのセンサーの紹介です。
今日紹介するのは
Salinity Sensorです。
日本語にすると「塩分センサー」要するに液体中の塩分濃度を測定するセンサーです。
ようするに水の中に入れておいてその水の塩分濃度を測るモノという訳ですね。腐食しそう・・・(笑)
海や汽水域の塩分濃度を測ったり、
あとは水の中の塩分濃度による浮力の違いなどを調査するのに使えるよー。とのことですが、
それ測ってどうするの?
あくまで「教材としての」センサーという訳ですね。実用的な用途はかなり限定されると思います。
ちょっと用途が少ないというのは残念ですね。
イヤ、レスキュー競技がこのセンサーがないとできなくなる!とかいうのも困りますけど・・・
まぁそんな感じで今日はこの辺でおわりです。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日の午後の地震の影響で部活ができず帰ることになってしまって大会の後始末すらできない状況です(笑)
それだけならいいのですが、運悪く20~30分ほど電車に閉じ込められました。もっと時間ずらして帰ればよかった・・・
人も多いし。残念な一日となってしまいました。体育で突き指もしたし・・・
それで今日は、大会前日に行った東東京ノード大会予想の結果発表基答え合わせを行なおうと考えています。
まずサッカーライトウェイトプライマリの
・大多数のチームが外光に苦しみ、ボールを追えない。
これはハズレでしたね。
どうにも外光云々以前に、フィールドが置かれている部屋そのもの、
というより会場の建物全体が微妙に傾いていて、
ボールがほっといてもゴールにはいってしまうような状況だったそうです。
神奈川・西東京ノードの時も同じようなことがあったそうですが・・・
という訳で苦しめられたのは外光ではなく、部屋の傾斜でした。
逆に外光に苦しんだチームはいたのかなぁ・・・?
次にサッカーライトウェイトセカンダリの
・ぶっちゃけ勝敗をあまり気にしない。
これについてはどうなのかは知りませんが、予想通り、2チームとも推薦されました。
よってとりあえずこれはアタリということにしておきます。
そしてダンスプライマリダンス部門の
・優勝決定済。
ダンスプライマリシアター部門の
・インタビューで差がつく雰囲気が。
ダンスセカンダリダンス部門の
・競技が行われない。
ダンスセカンダリシアター部門の
・独走態勢
この4つに関してですが、どうやらダンスは全て一括して競技を行った模様です。
つまり独走だの優勝確定だの競技が行われないだのという予想は全部ハズレです。
ただ、インタビューでの差に関しましては、アタリといっていいでしょう。
1~4位は殆どインタビューで決まりました。ここまで盛大に当たると清々しいです。
そしてサッカーオープンAの
・動いた方が勝ち。
これも大アタリでした。片方動いて片方動かない。とりあえず高専対決は先輩が勝利しました。
レスキューAプライマリの
・入賞争いはゴールタイムの差。
誰もが予想できる当然の結果。もちろんアタリです。
只、今回は入賞したチーム内での順位争いに留まり、満点だけどタイムで入賞を逃した!
といったチームはいませんでした。
どちらにせよ、もはや近づける領域にありません。
最後にレスキューAセカンダリ。
・バンプの位置で全てが決まる。
流石に自分の参加した競技。この予想は当たらないはずがありません。
今回の大会ではバンプに沈んだチームは数多くいました。僕もそうだし、
バンプさえなければ優勝できたであろうと断言できるチームもいましたね。
でもノード落ちになったりと。波乱でしたね。
また、順当に課題をクリアして一応坂を上ったチームは
殆ど関東に進めるであろうという予想もとりあえず当たりましたね。
因みに今回の大会ではプライマリでは一番手から缶の救出がありましたが、
セカンダリはなんと今回も救出なしとなってしまいました。すみません。
とりあえず関東では助けたいと考えております。
とりあえず今日はこの辺で
正解数:5
誤答数:4
正答率:55.6%
赤点ですね。残念です。
(^・ω・)ノRadiumProduction in RoboCupJunior
それだけならいいのですが、運悪く20~30分ほど電車に閉じ込められました。もっと時間ずらして帰ればよかった・・・
人も多いし。残念な一日となってしまいました。体育で突き指もしたし・・・
それで今日は、大会前日に行った東東京ノード大会予想の結果発表基答え合わせを行なおうと考えています。
まずサッカーライトウェイトプライマリの
・大多数のチームが外光に苦しみ、ボールを追えない。
これはハズレでしたね。
どうにも外光云々以前に、フィールドが置かれている部屋そのもの、
というより会場の建物全体が微妙に傾いていて、
ボールがほっといてもゴールにはいってしまうような状況だったそうです。
神奈川・西東京ノードの時も同じようなことがあったそうですが・・・
という訳で苦しめられたのは外光ではなく、部屋の傾斜でした。
逆に外光に苦しんだチームはいたのかなぁ・・・?
次にサッカーライトウェイトセカンダリの
・ぶっちゃけ勝敗をあまり気にしない。
これについてはどうなのかは知りませんが、予想通り、2チームとも推薦されました。
よってとりあえずこれはアタリということにしておきます。
そしてダンスプライマリダンス部門の
・優勝決定済。
ダンスプライマリシアター部門の
・インタビューで差がつく雰囲気が。
ダンスセカンダリダンス部門の
・競技が行われない。
ダンスセカンダリシアター部門の
・独走態勢
この4つに関してですが、どうやらダンスは全て一括して競技を行った模様です。
つまり独走だの優勝確定だの競技が行われないだのという予想は全部ハズレです。
ただ、インタビューでの差に関しましては、アタリといっていいでしょう。
1~4位は殆どインタビューで決まりました。ここまで盛大に当たると清々しいです。
そしてサッカーオープンAの
・動いた方が勝ち。
これも大アタリでした。片方動いて片方動かない。とりあえず高専対決は先輩が勝利しました。
レスキューAプライマリの
・入賞争いはゴールタイムの差。
誰もが予想できる当然の結果。もちろんアタリです。
只、今回は入賞したチーム内での順位争いに留まり、満点だけどタイムで入賞を逃した!
といったチームはいませんでした。
どちらにせよ、もはや近づける領域にありません。
最後にレスキューAセカンダリ。
・バンプの位置で全てが決まる。
流石に自分の参加した競技。この予想は当たらないはずがありません。
今回の大会ではバンプに沈んだチームは数多くいました。僕もそうだし、
バンプさえなければ優勝できたであろうと断言できるチームもいましたね。
でもノード落ちになったりと。波乱でしたね。
また、順当に課題をクリアして一応坂を上ったチームは
殆ど関東に進めるであろうという予想もとりあえず当たりましたね。
因みに今回の大会ではプライマリでは一番手から缶の救出がありましたが、
セカンダリはなんと今回も救出なしとなってしまいました。すみません。
とりあえず関東では助けたいと考えております。
とりあえず今日はこの辺で
正解数:5
誤答数:4
正答率:55.6%
赤点ですね。残念です。
(^・ω・)ノRadiumProduction in RoboCupJunior
とりあえず、ええええええええ!?って結果になりました。
まずチーム名。
今年は

です。
るーすと読みます。るーずでもらずでもありません。
よく、るーずって言われますが、訂正がめんどくさいので一応反応します。
そんなLuzは今日も半分スタッフやってました。
会場設営から撤収、何故か誘導とかフィールド補修の手伝いもした気がします。
そしてもちろん最後のトゥルースでの荷物搬入も。日吉→飯田橋コースですね。いつも通り。
そんな競技に余裕があったから?いえいえ。結構ヨユウナイッスヨ(笑)
そして競技結果。
スミマセン。
上位とか、全然無理でした。
半分も取れなかったよ・・・><。
缶も掴めませんでした。こんなこと初めてです。
練習ではあんだけ掴めたのに・・・。因みに競技後の2階コンテストでも無調整で掴めました。なんでだろう。
そんなことを考えつつ、ちょっと「完璧にノード落としたなぁ・・・」と落胆。
そして、あーあ。入賞逃したなぁ・・・と思った矢先。

!?
どういうことなのでしょう。自分でもわかりません。
全くそういったものを意識して書いたつもりはなかったのですが・・予想外です。
ロボット散々だったのに・・・
なにはともあれ、これで6年ぶりのベストプレゼンテーション賞です。ありがとうございました。
只、審査委員長によると漢字の間違いが酷かったそうです。ゴメンナサイm(_ _)m
自分では確認あまりしなかったからなぁ・・・
そして驚いて動揺した数分後。
<それでは、関東ブロックの推薦チームを発表します。
<一位、~!
(中略)
<四位、~!
<五位、Luz!
あ。
首の皮一枚繋がりました。奇跡・・・
という訳で安定しない7年連続のノード突破を達成しました。枠が意外と広くて良かった・・・
因みに実際は6位まで行くことができました。
まぁ今までにないくらい斜め上展開の競技会でしたが、楽しかったと思います。
因みに得点は、缶以外は満点、
何故か障害物で2回、バンプで1回、一番意味不明な坂上で1回競技進行停止で合計4回。
結果105点でした。(215満点)
缶は見つけるまではよかったのですが、持ち上げる際に滑って上がりませんでした。
うーん、ぶっちゃけ障害物は最後の復帰で暴れだしたのでプログラム確認したら大丈夫になると思われます。
バンプは・・・・要対策(笑)
今後こそバンプを超えられるようにするぞー。
あ。最後トゥルース搬入の際に、レスキューチーフと、なんで試合の時だけ缶掴めなかったんでしょうね~
って話をしていたらチーフが、
「あの時は競技前にアルミホイル新しいのに変えて表面がつるつるでテープの段差もくっきりしてたからじゃないかな」
・・・えっ?
つまり競技順が一番最初だったので、
一番きれいでつるつるの状態の缶になってたから調整の時と違って上がらなかった・・・と?
そんでもって2階コンテストの時は既に競技が終わった後だったので、
たくさんのロボットや人が缶に触れてつるつるじゃなくなったから普通にあがった・・・ってこと?
ちょ。そりゃないよー(笑)
流石にそこまで読めませんでした。次からは気を付けよーっと。
埼玉ノード見聞録
千葉ノード見聞録
神奈川・西東京ノード疲れた録
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s:関東ブロックの開催場所は、さいたま大学で調整が進められていることが公式発表されました。
関東ブロック公式サイト
まずチーム名。
今年は
です。
るーすと読みます。るーずでもらずでもありません。
よく、るーずって言われますが、訂正がめんどくさいので一応反応します。
そんなLuzは今日も半分スタッフやってました。
会場設営から撤収、何故か誘導とかフィールド補修の手伝いもした気がします。
そしてもちろん最後のトゥルースでの荷物搬入も。日吉→飯田橋コースですね。いつも通り。
そんな競技に余裕があったから?いえいえ。結構ヨユウナイッスヨ(笑)
そして競技結果。
スミマセン。
上位とか、全然無理でした。
半分も取れなかったよ・・・><。
缶も掴めませんでした。こんなこと初めてです。
練習ではあんだけ掴めたのに・・・。因みに競技後の2階コンテストでも無調整で掴めました。なんでだろう。
そんなことを考えつつ、ちょっと「完璧にノード落としたなぁ・・・」と落胆。
そして、あーあ。入賞逃したなぁ・・・と思った矢先。
!?
どういうことなのでしょう。自分でもわかりません。
全くそういったものを意識して書いたつもりはなかったのですが・・予想外です。
ロボット散々だったのに・・・
なにはともあれ、これで6年ぶりのベストプレゼンテーション賞です。ありがとうございました。
只、審査委員長によると漢字の間違いが酷かったそうです。ゴメンナサイm(_ _)m
自分では確認あまりしなかったからなぁ・・・
そして驚いて動揺した数分後。
<それでは、関東ブロックの推薦チームを発表します。
<一位、~!
(中略)
<四位、~!
<五位、Luz!
あ。
首の皮一枚繋がりました。奇跡・・・
という訳で安定しない7年連続のノード突破を達成しました。枠が意外と広くて良かった・・・
因みに実際は6位まで行くことができました。
まぁ今までにないくらい斜め上展開の競技会でしたが、楽しかったと思います。
因みに得点は、缶以外は満点、
何故か障害物で2回、バンプで1回、一番意味不明な坂上で1回競技進行停止で合計4回。
結果105点でした。(215満点)
缶は見つけるまではよかったのですが、持ち上げる際に滑って上がりませんでした。
うーん、ぶっちゃけ障害物は最後の復帰で暴れだしたのでプログラム確認したら大丈夫になると思われます。
バンプは・・・・要対策(笑)
今後こそバンプを超えられるようにするぞー。
あ。最後トゥルース搬入の際に、レスキューチーフと、なんで試合の時だけ缶掴めなかったんでしょうね~
って話をしていたらチーフが、
「あの時は競技前にアルミホイル新しいのに変えて表面がつるつるでテープの段差もくっきりしてたからじゃないかな」
・・・えっ?
つまり競技順が一番最初だったので、
一番きれいでつるつるの状態の缶になってたから調整の時と違って上がらなかった・・・と?
そんでもって2階コンテストの時は既に競技が終わった後だったので、
たくさんのロボットや人が缶に触れてつるつるじゃなくなったから普通にあがった・・・ってこと?
ちょ。そりゃないよー(笑)
流石にそこまで読めませんでした。次からは気を付けよーっと。
埼玉ノード見聞録
千葉ノード見聞録
神奈川・西東京ノード疲れた録
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s:関東ブロックの開催場所は、さいたま大学で調整が進められていることが公式発表されました。
関東ブロック公式サイト
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(06/08)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
プロフィール
HN:
Luz
性別:
男性
アーカイブ