RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
今度は埼玉ノードに行ってきました。会場は埼玉大学です。

埼玉ノードは3月の5日と6日の2日に分けて行われていました。
でも競技はサッカー以外全部6日にやったのかな。でも最終的な順位の決定は6日の競技のようです。
大会が2日に分けられていると、調整時間が長いので競技者としてはありがたいですね。
運営をする側は大変になりますが・・・
僕個人としては、埼玉大学=ロボカップというイメージが既に定着しているのですが、
実際は、かなり大きい総合大学なので、とても広くて、いろんな学部がありました。そして迷いました。
今回の大会は、その中広い大学の教育学部の一部と総合研究棟で行われました。
それぞれの競技が別々の棟で行われていたので、
普通であれば、競技者は他の競技を見ることができなくなってしまうことが多いのですが埼玉の場合、

このようなシステムでほかの競技も観戦することができていました。
サッカーとレスキューの様子が写されていて、何故かダンスだけはありませんでした。

レスキューの会場では上の写真のようにPCで、ダンスのフィールドでは会場のスクリーンに、
それぞれ映像が投影されていました。
サッカーの会場では・・・どこにあったのでしょう。探したけどわかりませんでした。
それでもこのシステムは素晴らしいと思います。ぜひほかの競技会でも実施してほしいものですね。
一番必要なのはレスキューBかな?
まずは総合研究棟で行われていたサッカーチャレンジについてです。

やはり埼玉はサッカー王国ですね。
最近、他のノードはサッカーよりレスキューをする人の方が多い傾向になってきているのですが、
埼玉だけは未だにサッカーの方が圧倒的に多いです。サッカーの大国です。
強いチームも沢山いて、なんだか面白い競技でした。
終わってみたら圧倒的なチームがいくつかでていたようでしたが・・・
使用している素体は主に、NXT

ロボデザイナー

TJ3

の3グループがありました。
恐らく回路の完全な自作ロボットはいなかったと思います。
どのチームもまだちょっとプログラムにあやふやな点があることがロボットの動きからわかりましたが、
ロボットの作りとしてはどれもしっかりとしていて、
僕が見た限りだと、ロボットの負傷退場は少なかったように思えます。
まぁサッカーはちょっと他から離れているのであまり見られませんでしたが・・・
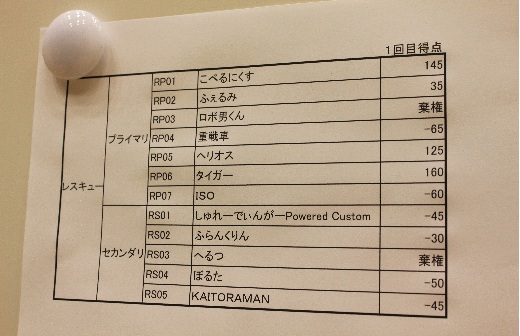
半分が終わった時点でこのような試合結果となっていました。
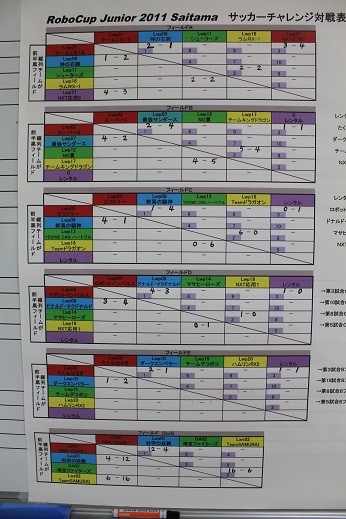
一番下のSリーグの得点がえらいことになってるような・・・
次はレスキューです。

サッカーと打って変わり、レスキューはプライマリ10チームセカンダリ2チームの登録から、
セカンダリプライマリともに1チームずつの欠場があり、計10チームでの競技になりました。

2010ルールに準じてコースにはタイルが使用されていました。缶の位置は・・・適当なのかな?
フィールドの壁もしっかりついているので、ちゃんとした2010ルールなのかと思いきや、
ショートカットルールの廃止や、競技進行の停止のカウント等に2011的なローカルルールが見られました。
これで競技進行の停止のカウントがなかったら1階は完全な2011ルールでしたね。
特にショートカット禁止のルールの影響はかなり大きいようで、
これによって競技進行の停止を取られてしまったチームが幾つか見られました。
因みに競技結果はこのようになっていました。
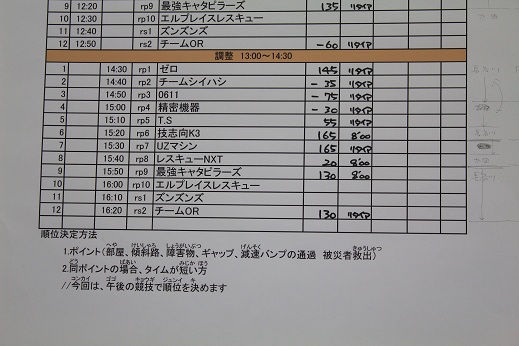
今回もプラセカともに、競技時間内に被災者を救出できたチームはありませんでした。
やはり被災者救出はとても難しい課題のようですね。日本の競技ではまだ一度も救出をみていませんから・・・
千葉でもそうでしたが、競技に勝つために
あえて被災者を救助するための機構を積まないチームが増えているようですね。
プレゼンにも「被災者はあきらめて他で点を取る!」と書いているチームもいくつか居ましたが、
これ、「レスキュー」競技ですよね?ライントレースではないんです。
そこのところを根本から間違っていて、単純にポイントだけで競技に勝つためだけのロボットを
被災者を助ける機構積んだロボットより良いとして順位つけて上位大会に出すのはどうかと思うんですね。
そこらへんはちゃんとルールで規制してほしいところですね。
埼玉のレスキューロボットの紹介はまたするとして、今日はこの辺で終わらせときます。
千葉ノード見聞録は此方→
神奈川・西東京ノード疲れた録は此方→
東東京ノード終了しました。録は此方→
埼玉ノードのレスキューロボットの紹介は此方→
(^・ω・)ノRadiumProduction in RoboCupJunior
埼玉ノードは3月の5日と6日の2日に分けて行われていました。
でも競技はサッカー以外全部6日にやったのかな。でも最終的な順位の決定は6日の競技のようです。
大会が2日に分けられていると、調整時間が長いので競技者としてはありがたいですね。
運営をする側は大変になりますが・・・
僕個人としては、埼玉大学=ロボカップというイメージが既に定着しているのですが、
実際は、かなり大きい総合大学なので、とても広くて、いろんな学部がありました。そして迷いました。
今回の大会は、その中広い大学の教育学部の一部と総合研究棟で行われました。
それぞれの競技が別々の棟で行われていたので、
普通であれば、競技者は他の競技を見ることができなくなってしまうことが多いのですが埼玉の場合、
このようなシステムでほかの競技も観戦することができていました。
サッカーとレスキューの様子が写されていて、何故かダンスだけはありませんでした。
レスキューの会場では上の写真のようにPCで、ダンスのフィールドでは会場のスクリーンに、
それぞれ映像が投影されていました。
サッカーの会場では・・・どこにあったのでしょう。探したけどわかりませんでした。
それでもこのシステムは素晴らしいと思います。ぜひほかの競技会でも実施してほしいものですね。
一番必要なのはレスキューBかな?
まずは総合研究棟で行われていたサッカーチャレンジについてです。
やはり埼玉はサッカー王国ですね。
最近、他のノードはサッカーよりレスキューをする人の方が多い傾向になってきているのですが、
埼玉だけは未だにサッカーの方が圧倒的に多いです。サッカーの大国です。
強いチームも沢山いて、なんだか面白い競技でした。
終わってみたら圧倒的なチームがいくつかでていたようでしたが・・・
使用している素体は主に、NXT
ロボデザイナー
TJ3
の3グループがありました。
恐らく回路の完全な自作ロボットはいなかったと思います。
どのチームもまだちょっとプログラムにあやふやな点があることがロボットの動きからわかりましたが、
ロボットの作りとしてはどれもしっかりとしていて、
僕が見た限りだと、ロボットの負傷退場は少なかったように思えます。
まぁサッカーはちょっと他から離れているのであまり見られませんでしたが・・・
半分が終わった時点でこのような試合結果となっていました。
一番下のSリーグの得点がえらいことになってるような・・・
次はレスキューです。
サッカーと打って変わり、レスキューはプライマリ10チームセカンダリ2チームの登録から、
セカンダリプライマリともに1チームずつの欠場があり、計10チームでの競技になりました。
2010ルールに準じてコースにはタイルが使用されていました。缶の位置は・・・適当なのかな?
フィールドの壁もしっかりついているので、ちゃんとした2010ルールなのかと思いきや、
ショートカットルールの廃止や、競技進行の停止のカウント等に2011的なローカルルールが見られました。
これで競技進行の停止のカウントがなかったら1階は完全な2011ルールでしたね。
特にショートカット禁止のルールの影響はかなり大きいようで、
これによって競技進行の停止を取られてしまったチームが幾つか見られました。
因みに競技結果はこのようになっていました。
今回もプラセカともに、競技時間内に被災者を救出できたチームはありませんでした。
やはり被災者救出はとても難しい課題のようですね。日本の競技ではまだ一度も救出をみていませんから・・・
千葉でもそうでしたが、競技に勝つために
あえて被災者を救助するための機構を積まないチームが増えているようですね。
プレゼンにも「被災者はあきらめて他で点を取る!」と書いているチームもいくつか居ましたが、
これ、「レスキュー」競技ですよね?ライントレースではないんです。
そこのところを根本から間違っていて、単純にポイントだけで競技に勝つためだけのロボットを
被災者を助ける機構積んだロボットより良いとして順位つけて上位大会に出すのはどうかと思うんですね。
そこらへんはちゃんとルールで規制してほしいところですね。
埼玉のレスキューロボットの紹介はまたするとして、今日はこの辺で終わらせときます。
千葉ノード見聞録は此方→
神奈川・西東京ノード疲れた録は此方→
東東京ノード終了しました。録は此方→
埼玉ノードのレスキューロボットの紹介は此方→
(^・ω・)ノRadiumProduction in RoboCupJunior
僕が作ったロボカップレスキュー用のロボットの中には、唯一公式大会で使用されなかったロボットがあります。
というのは、作ったはいいけど、どうにもレスキュー競技に向いていないというか・・・使えないというか・・・
1世代前のレスキューなら使えたんだろうなぁ。というそんな機体です。
作成したのは今から約2年前。高専に入学するか、その前ぐらいの話になります。
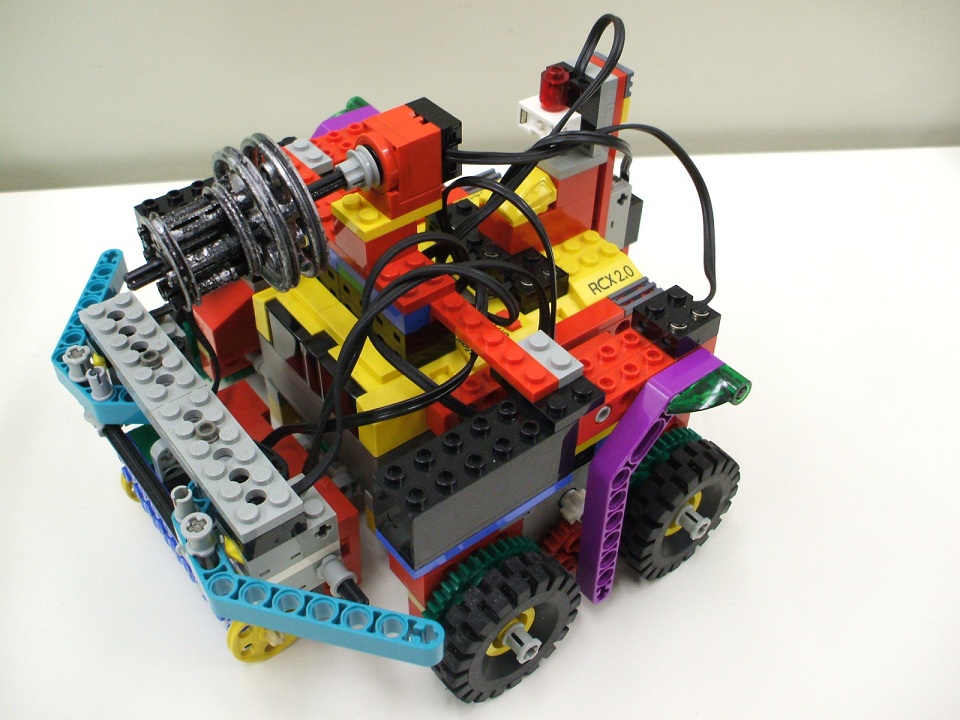
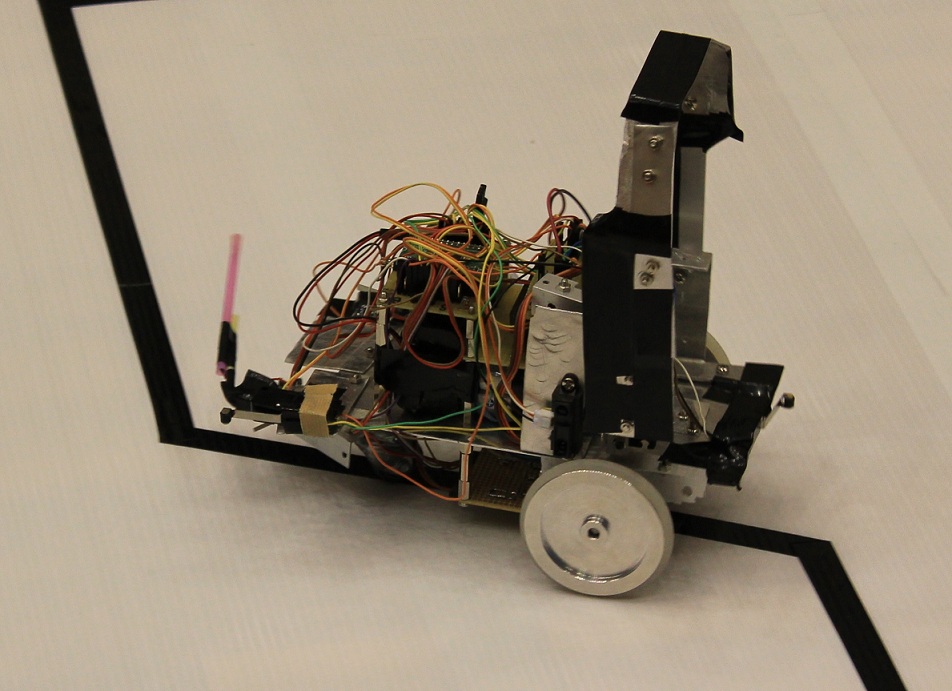
どんなロボットかといいますと、こんなロボットです。
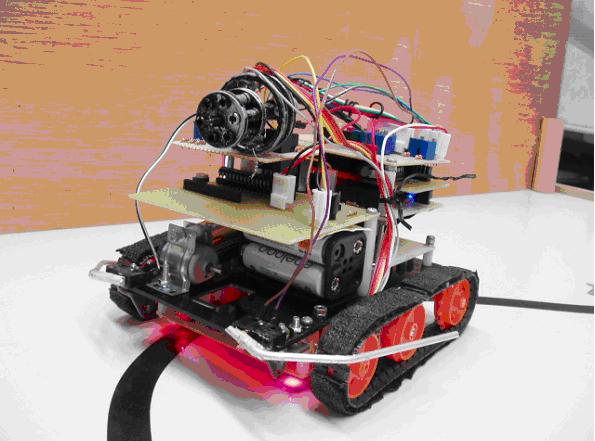
自作機。ですね。
全体を写した写真が何故かこれ一枚しかないのですが、これ、まだ未完成の状態の写真ですね。
この後で串を吹き飛ばす機構とちゃんとしたバンパーが装着されます。
何を思ったのか、本体の板はアクリル板になってしまっています。
確か理由は家にアクリル板が転がっていたから、だったかと思います。よく割れなかったなぁ。
当時はまだ子供だったので難しいLSIは使えませんでした。
よって16FのPICマイコン2つで制御されています。
確かライトセンサーが下に12か13個あって、すべてデジタルで制御されていました。
アナログだと処理に多少時間がかかるからとかそんな、途方もない理由だったかと思います。
それで、あとはタッチセンサーが2個、水銀が一個。この時は方位センサーとか加速度センサーとか
そういう類のものは使用していません。
でもその代り、写真にはついてませんが、液晶が搭載されていました。
これがないとセンサーの値を見るのにいちいちPCが要りますからね。
でも・・・当時の僕にはちょっとムツカシイ・・・まぁなんとかやった記憶があります。
アナログ入力を一切使わない完璧なデジタルロボットだったので調整自体は楽でした。
タミヤ製のツインモーターギアボックスを使用していたので速度にちょっと難ありでしたが・・・

でもそのお蔭で「坂だけは」速かった気がします。
その代り、ものすごく動作音がうるさくて、それだけの理由で使うのをやめました。
結局、速度問題とライトセンサーの位置にちょっと問題があってライントレースが難しかったので
どうにせよ大会で使うことはなかったかと思いますが・・・
まぁ今度暇だったらもう一回自作機を作ってみようかなと考えています。
その時はセンサーの数が20超えるぞー・・・
数えるだけで頭が痛くなるくらい増える予感がしてきました。
ほんとに作っちゃおうかな。でも大会まであと2週間。正直どう考えても無理ですね。
こんな黒歴史の紹介でした♪
でもこのロボット。今だったらもっとスマートに作れただろうなぁ・・・(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
というのは、作ったはいいけど、どうにもレスキュー競技に向いていないというか・・・使えないというか・・・
1世代前のレスキューなら使えたんだろうなぁ。というそんな機体です。
作成したのは今から約2年前。高専に入学するか、その前ぐらいの話になります。
どんなロボットかといいますと、こんなロボットです。
自作機。ですね。
全体を写した写真が何故かこれ一枚しかないのですが、これ、まだ未完成の状態の写真ですね。
この後で串を吹き飛ばす機構とちゃんとしたバンパーが装着されます。
何を思ったのか、本体の板はアクリル板になってしまっています。
確か理由は家にアクリル板が転がっていたから、だったかと思います。よく割れなかったなぁ。
当時はまだ子供だったので難しいLSIは使えませんでした。
よって16FのPICマイコン2つで制御されています。
確かライトセンサーが下に12か13個あって、すべてデジタルで制御されていました。
アナログだと処理に多少時間がかかるからとかそんな、途方もない理由だったかと思います。
それで、あとはタッチセンサーが2個、水銀が一個。この時は方位センサーとか加速度センサーとか
そういう類のものは使用していません。
でもその代り、写真にはついてませんが、液晶が搭載されていました。
これがないとセンサーの値を見るのにいちいちPCが要りますからね。
でも・・・当時の僕にはちょっとムツカシイ・・・まぁなんとかやった記憶があります。
アナログ入力を一切使わない完璧なデジタルロボットだったので調整自体は楽でした。
タミヤ製のツインモーターギアボックスを使用していたので速度にちょっと難ありでしたが・・・
でもそのお蔭で「坂だけは」速かった気がします。
その代り、ものすごく動作音がうるさくて、それだけの理由で使うのをやめました。
結局、速度問題とライトセンサーの位置にちょっと問題があってライントレースが難しかったので
どうにせよ大会で使うことはなかったかと思いますが・・・
まぁ今度暇だったらもう一回自作機を作ってみようかなと考えています。
その時はセンサーの数が20超えるぞー・・・
数えるだけで頭が痛くなるくらい増える予感がしてきました。
ほんとに作っちゃおうかな。でも大会まであと2週間。正直どう考えても無理ですね。
こんな黒歴史の紹介でした♪
でもこのロボット。今だったらもっとスマートに作れただろうなぁ・・・(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
どうにも来年度入ってくる一年生はロボカップ経験者がとてつもなく多いみたいです。
去年一年生が入ってこなかった(というより僕が入れさせなかった)うちとしては非常にありがたいことです。
が。困ったことがひとつ。
その大量に来た新一年生を、部室のどこに押し込もうかという問題です。
つまり部屋が狭すぎて若干話になっていないのです。
今でさえ2人が定員の部室なのに・・・どうしましょう。
名義上もう一つ部屋があるのですが、その部屋は今倉庫にされてしまっていて、
たとえその部屋を片付けても、4、5人押し込むのがやっとでしょうか。
さてどうしたものか。困ったものです。
あ。今日と明日は埼玉ノードですね。明日はもしかしたら出没するかもしれません。
埼玉大学久しぶりだなぁ。
(^・ω・)ノRadiumProduction in RoboCupJunior
去年一年生が入ってこなかった(というより僕が入れさせなかった)うちとしては非常にありがたいことです。
が。困ったことがひとつ。
その大量に来た新一年生を、部室のどこに押し込もうかという問題です。
つまり部屋が狭すぎて若干話になっていないのです。
今でさえ2人が定員の部室なのに・・・どうしましょう。
名義上もう一つ部屋があるのですが、その部屋は今倉庫にされてしまっていて、
たとえその部屋を片付けても、4、5人押し込むのがやっとでしょうか。
さてどうしたものか。困ったものです。
あ。今日と明日は埼玉ノードですね。明日はもしかしたら出没するかもしれません。
埼玉大学久しぶりだなぁ。
(^・ω・)ノRadiumProduction in RoboCupJunior
以前、NXTのタッチセンサーの紹介を行ったことがあるかと思います。内部構造について簡単に説明したくらいですが、
でもこのタッチセンサー。ちょっと大きいと思いませんか?
これだけ大きいと非常に使いにくいですよね?、僕なんかこれ使ったことありませんよ。大きすぎて。
じゃあどんな僕は普段どんなタッチセンサーを使っているのか。
答えはこれ、RCXのタッチセンサーです。

普通のブロックと同じような作りになっていますが、一番奥のポッチの下にはシャフトの穴があります。
黄色い部分がセンサーの部分ですね。
電接はケーブルブロックをこのようにはめるだけで、簡単にできるようようになっています。

これだけ小さいと、バンパーの制作もだいぶ楽になりますよね?
因みにこのタッチセンサー。実は内部抵抗が500Ωほどあるので
LEGO以外で使用する際にはちょっとお気を付けください。実質これ、圧力センサーですし・・・
プルアップやプルダウンの抵抗の値によっては出力値が荒ぶります。
普通に10kΩとか使っていればなんも問題ないでしょう。
以前に1kをプルダウンで使って、値が正しく出ない!といって
2、3日死んだ経験がある人が知り合いにいたので・・・あ、これは僕じゃないですよ。
もっと昔にはプルダウンすらやらないで値が正しく出ない!といって
2、3日死んだ経験がある人も知り合いにいましたが・・・因みにさっきのと同一人物です。
まぁこんなタッチセンサーですが、RCXやNXTは元々アナログ入力(と通信)しか存在しないので
こんなことは気にしなくて大丈夫です。
あと、NXTのタッチセンサーにあった穴ですが、あれがないと不便だという方の為に
RCXには一体型タッチセンサーというものがあってこれはNXTのと同じように・・・ってあれ?
もう売ってない!
写真がどこにもない!
純正のRCXのタッチセンサーには上の写真のもののほかにもう1種類あったのですが
どうやら結構レアもののようです。見つけたら報告よろしくお願いします(笑)
それでは~
追記:海外の(特に欧州の)LEGOの転売サイト等で売っているようですね。Paypalなどを駆使して輸入するしかないようです。
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCup Junior
でもこのタッチセンサー。ちょっと大きいと思いませんか?
これだけ大きいと非常に使いにくいですよね?、僕なんかこれ使ったことありませんよ。大きすぎて。
じゃあどんな僕は普段どんなタッチセンサーを使っているのか。
答えはこれ、RCXのタッチセンサーです。
普通のブロックと同じような作りになっていますが、一番奥のポッチの下にはシャフトの穴があります。
黄色い部分がセンサーの部分ですね。
電接はケーブルブロックをこのようにはめるだけで、簡単にできるようようになっています。
これだけ小さいと、バンパーの制作もだいぶ楽になりますよね?
因みにこのタッチセンサー。実は内部抵抗が500Ωほどあるので
LEGO以外で使用する際にはちょっとお気を付けください。実質これ、圧力センサーですし・・・
プルアップやプルダウンの抵抗の値によっては出力値が荒ぶります。
普通に10kΩとか使っていればなんも問題ないでしょう。
以前に1kをプルダウンで使って、値が正しく出ない!といって
2、3日死んだ経験がある人が知り合いにいたので・・・あ、これは僕じゃないですよ。
もっと昔にはプルダウンすらやらないで値が正しく出ない!といって
2、3日死んだ経験がある人も知り合いにいましたが・・・因みにさっきのと同一人物です。
まぁこんなタッチセンサーですが、RCXやNXTは元々アナログ入力(と通信)しか存在しないので
こんなことは気にしなくて大丈夫です。
あと、NXTのタッチセンサーにあった穴ですが、あれがないと不便だという方の為に
RCXには一体型タッチセンサーというものがあってこれはNXTのと同じように・・・ってあれ?
もう売ってない!
写真がどこにもない!
純正のRCXのタッチセンサーには上の写真のもののほかにもう1種類あったのですが
どうやら結構レアもののようです。見つけたら報告よろしくお願いします(笑)
それでは~
追記:海外の(特に欧州の)LEGOの転売サイト等で売っているようですね。Paypalなどを駆使して輸入するしかないようです。
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCup Junior
ちょっとライトセンサーを変えることになりそうな雰囲気があります。
あと2週間だけど、なんとか・・・なるよね!?
実質結構ヤバいところもありますが、まぁ大丈夫でしょう。
っていうかやらないと直角で死ぬ事態になりかねません。
変えます。きっと。きっと。きっとかっと。
時間ないから無理かもしれませんけど・・・
今日なんか一日サッカーの手伝いで終わったので(笑)
自分のロボットなんか一切触れてない気もします。
全然ライントレースできてないのに・・・
さて、どうしたものか。非常に困ったものです。
(^・ω・)ノRadiumProduction in RoboCupJunior
あと2週間だけど、なんとか・・・なるよね!?
実質結構ヤバいところもありますが、まぁ大丈夫でしょう。
っていうかやらないと直角で死ぬ事態になりかねません。
変えます。きっと。きっと。きっとかっと。
時間ないから無理かもしれませんけど・・・
今日なんか一日サッカーの手伝いで終わったので(笑)
自分のロボットなんか一切触れてない気もします。
全然ライントレースできてないのに・・・
さて、どうしたものか。非常に困ったものです。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日は少し昔のお話をします。
今を遡ること4年弱。
世界大会を目指して、ある一台のロボットが作られました。
後に初のジャパンオープンに出場することになる当時のRadiumのロボットです。
まぁ当時はチーム名が違いましたが(笑)
唯一。年間を通して一度も賞が取れなかったこの年。なぜこの年だけ取ることができなかったのでしょうか?
その原因。一番大きいのがロボットの変更の量でしょうか。
最初。このロボットだったのですが、大会前1週間で

この後また一回変更する。という大変更を毎日のように行っていました。
これでも当時まだ存在しなかった坂検知機構、ダブルバンパー、そしてライン検索プログラムを
初めてレスキューに導入した(と言われている)ロボットだったので、
なんとかジャパンオープンまでは勝ち進めたのですが・・・
実際のところ去年のロボットでも全部使っていたのですが、あまり目立たなかったのでなかったことに(笑)
当時のジャパンオープンはマルチ競技だったんですね。
つまり2台のロボットが同じアリーナで競技をしていた訳です。
そして競技者も少なかったので結構順位が低くても上に勝ち進めたのです。
それで僕自身も当時5位でなんとかジャパンオープンにいけたのですが、
此方も関東5位なのでそんなに強くない。
また、マルチの相手もそこまで順位の良いチームではなかったのですね。そして結果。
競技中に2台が衝突。そして競技続行不可 もちろん得点は悲惨でしたね。
「今までのレスキューはサッカーと違って衝突はないから・・・」とロボットを簡易に作っていたのです。
結局それが惨事を招いた・・・と。
それ以来、僕はロボットを組む際はしっかりとレンガ上になるようにブロックをはめて、ペグで固定して、
更に接着剤でロボットを固定し、そしてテープで周りを補強するようになりました。
まぁ流石にテープは負荷のかかる部分しかしてませんが・・・
ちょっと大袈裟すぎると思うかもしれませんが、そのおかげでそれ以来、
ロボットの破損でリタイアをすることはなくなりましたね。
つまり結局なにがいいたいかというと、
ロボットを作るときは頑丈に作りましょう。ということです。
ぶっちゃけ落としたぐらいで壊れるロボットは話になりません。と言っておきましょう。
といいつつ今年のロボットは殆どが学校のパーツで、接着剤ができないので落とすと壊れます(笑)
何故今日こんな話をしたかといいますと、今日学校で・・・><。
では今日はこの辺で
因みにうやむやになった2007年度賞状が取れなかった原因は
東京前のロボット変更と関東での坂センサー崩壊、ジャパンでの衝突による破損です。
機械は昔から苦手だったんですね。
(^・ω・)ノRadiumProduction in RoboCupJunior
今を遡ること4年弱。
世界大会を目指して、ある一台のロボットが作られました。
後に初のジャパンオープンに出場することになる当時のRadiumのロボットです。
まぁ当時はチーム名が違いましたが(笑)
唯一。年間を通して一度も賞が取れなかったこの年。なぜこの年だけ取ることができなかったのでしょうか?
その原因。一番大きいのがロボットの変更の量でしょうか。
最初。このロボットだったのですが、大会前1週間で
この後また一回変更する。という大変更を毎日のように行っていました。
これでも当時まだ存在しなかった坂検知機構、ダブルバンパー、そしてライン検索プログラムを
初めてレスキューに導入した(と言われている)ロボットだったので、
なんとかジャパンオープンまでは勝ち進めたのですが・・・
実際のところ去年のロボットでも全部使っていたのですが、あまり目立たなかったのでなかったことに(笑)
当時のジャパンオープンはマルチ競技だったんですね。
つまり2台のロボットが同じアリーナで競技をしていた訳です。
そして競技者も少なかったので結構順位が低くても上に勝ち進めたのです。
それで僕自身も当時5位でなんとかジャパンオープンにいけたのですが、
此方も関東5位なのでそんなに強くない。
また、マルチの相手もそこまで順位の良いチームではなかったのですね。そして結果。
競技中に2台が衝突。そして競技続行不可 もちろん得点は悲惨でしたね。
「今までのレスキューはサッカーと違って衝突はないから・・・」とロボットを簡易に作っていたのです。
結局それが惨事を招いた・・・と。
それ以来、僕はロボットを組む際はしっかりとレンガ上になるようにブロックをはめて、ペグで固定して、
更に接着剤でロボットを固定し、そしてテープで周りを補強するようになりました。
まぁ流石にテープは負荷のかかる部分しかしてませんが・・・
ちょっと大袈裟すぎると思うかもしれませんが、そのおかげでそれ以来、
ロボットの破損でリタイアをすることはなくなりましたね。
つまり結局なにがいいたいかというと、
ロボットを作るときは頑丈に作りましょう。ということです。
ぶっちゃけ落としたぐらいで壊れるロボットは話になりません。と言っておきましょう。
といいつつ今年のロボットは殆どが学校のパーツで、接着剤ができないので落とすと壊れます(笑)
何故今日こんな話をしたかといいますと、今日学校で・・・><。
では今日はこの辺で
因みにうやむやになった2007年度賞状が取れなかった原因は
東京前のロボット変更と関東での坂センサー崩壊、ジャパンでの衝突による破損です。
機械は昔から苦手だったんですね。
(^・ω・)ノRadiumProduction in RoboCupJunior
どうやら、急に決まった「一人チームはダメ!」というルールは事実上ジャパンオープンから適応のようですね。
ジャパンオープンとしては複数人数のチームでないと世界大会への選抜は行わない。としているようです。
只、競技への参加自体は行えるようなので、出るだけなら一人でも構いませんが・・・ということみたいです。
どんどん民主的じゃなくなってきてますね。嫌な世界です。
因みに高専のロボカップは部員が少ないので
新入部員がいなければ恐らくジャパンから先にいけないチームが出てくるでしょう。
さて、どうしたものか・・・
高専と言えば、早々にも高専から関東ブロック出場のチームが1チームでることが確定したので
遠征計画の話が始まりました。どうやら後援会様の予算が残っているようなので、前泊できそうです。
ホテルがとれればだけど(笑)「実はもう既にいっぱいだったー」なんてことがないといいのですが・・・
まぁ普通に考えれば大丈夫でしょう。でもホテルから電車乗り継ぐとかありそうだな・・・
まぁ考えても仕方がありませんね。なるようになるしか。
という訳で、唐突ですが、今日は千葉ノードに出場していたロボットを何台かご紹介します。
まずは「しゅれーでぃんがーPowered Custom」のロボットです。
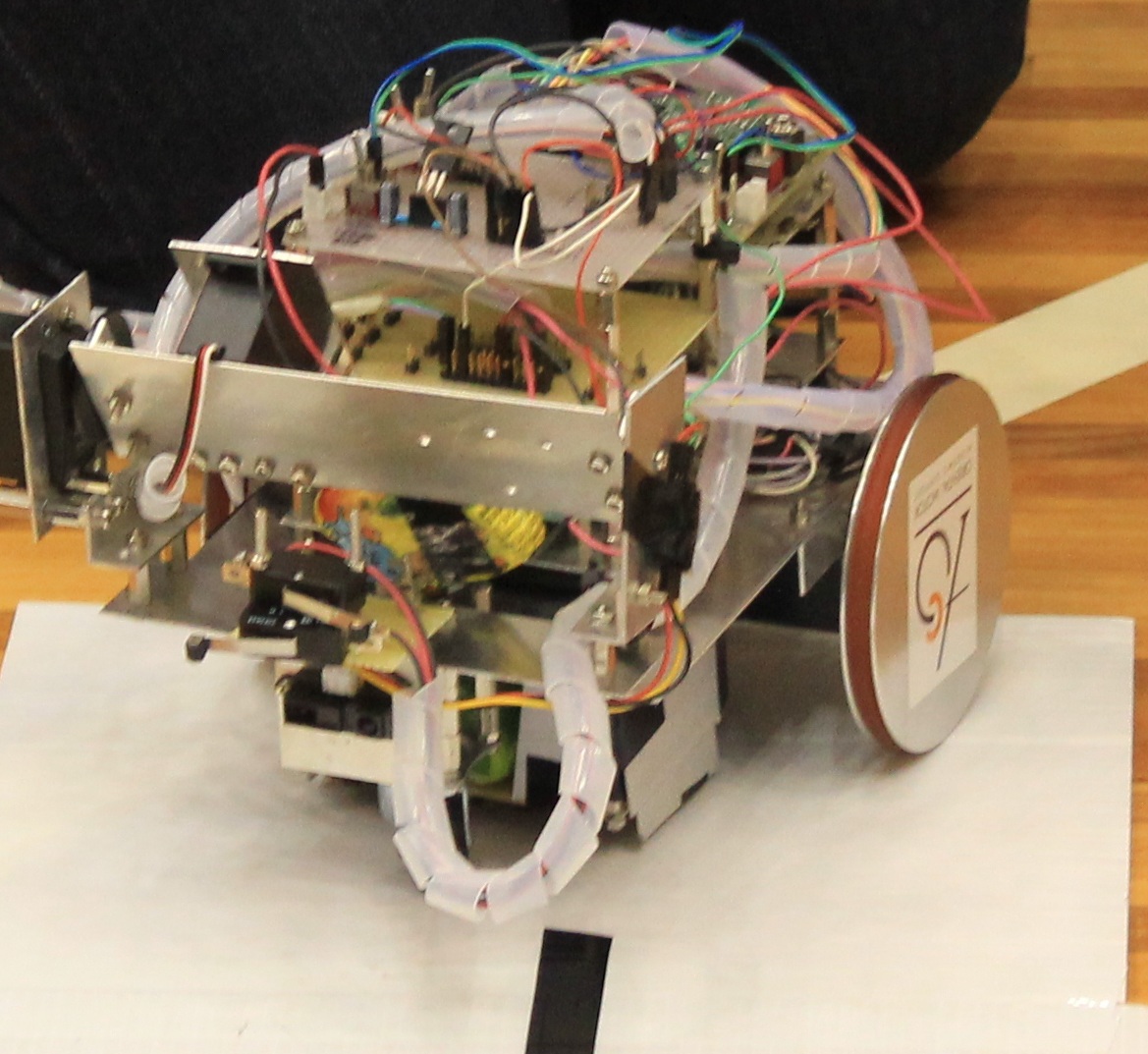
なんというか・・・すごく威圧感のようなものを感じるのは僕だけでしょうか。とても大きいロボットです。
去年の関東ブロックで初めて見させて頂いたのですが、
この千葉独特のロボットの造りは非常に素晴らしいですね。
個人的には特にモーターが。あのモーター最高です。音が。
そしてチーム名の通り(?)ロボット自体のパワーも強く、
このように障害物を押し倒す場面も見られました。
また、ロボット前面になにやらサーボモーターのようなものが幾つか見られます。
缶を掴む機構なのか、それともその元なのか、詳しくはわかりませんが、
これが駆動して缶を持ち上げるところが個人的にはすごく見たかったです(笑)
今回の大会では競技で一度も缶を持ち上げたロボットがいなかったのでその点はすごく残念でした。
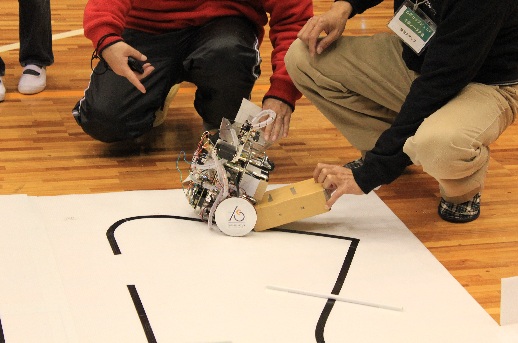
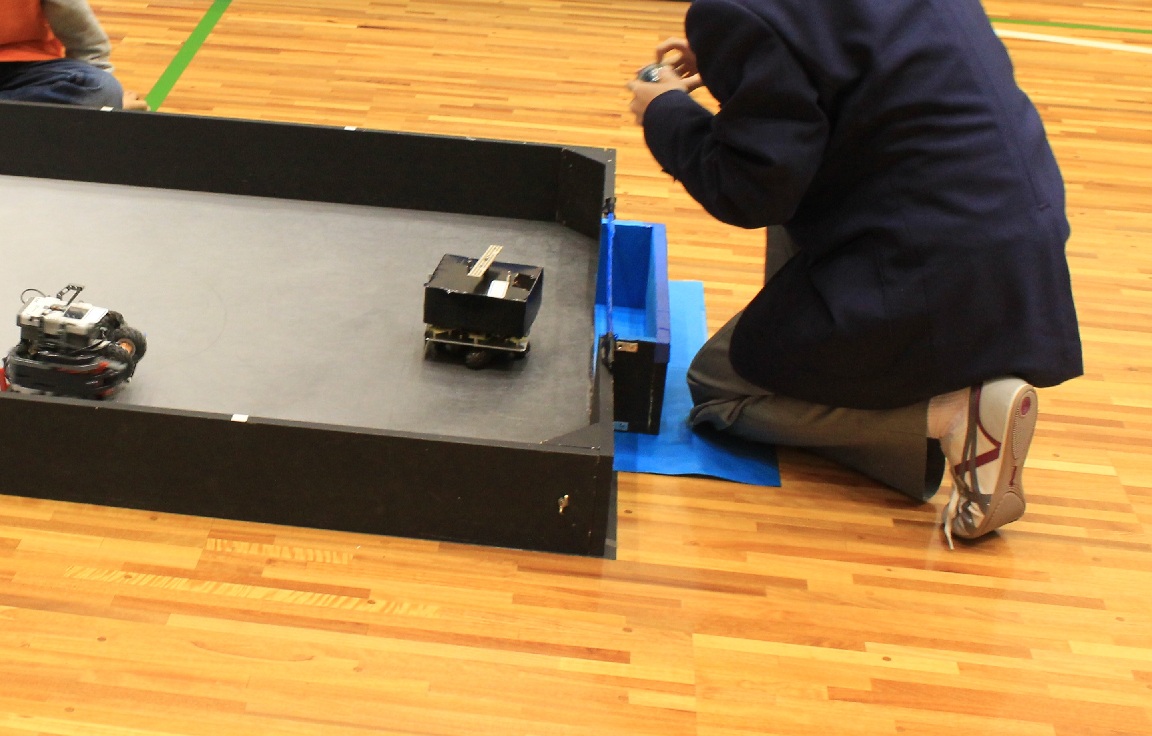
次はプライマリで惜しくも時間差で2位になった「タイガー」です。
バンパーが凄く特徴的ですね。一体どこまでがバンパーなのでしょうね(笑)
あと前輪と後輪の幅が違うのも特徴的です。どんな仕組みになってるんだろう・・・
僕が見た限りだとライントレースは1位のロボットより早かったような気がします。なのに時間差で2位に。
恐らくその原因は「坂」なのでしょう。
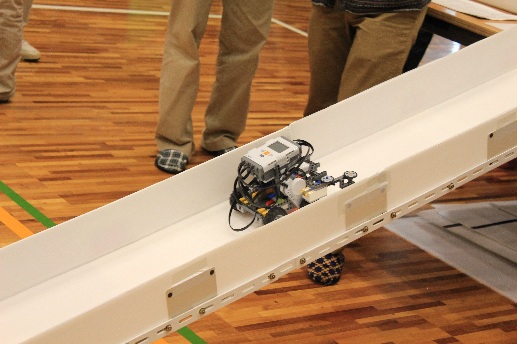
作戦なのか、仕様なのかはわかりませんが、ずっと好調だったのに坂に入った途端、
いきなり速度がガクッと下がってしましました。ゆっくり、ゆっくり、
でも確実に、懸命に登っている姿は周りのギャラリーの注目を浴びていました。
こういうなんか「頑張ってる!」ロボットはやっぱり見てて応援したくなりますよね。
でも僕個人としてはこの結果を見て
「あぁ、やっぱり上位は速度が順位を分ける時代になったんだなぁ。」と痛感してしましました。
まぁ今回の場合はどちらのチームも缶をつかんでいないので、ちょっと話が変わってきますが
やっぱり昔みたいにのんびりパフォーマンスしている時間的余裕は失われてきているのでしょうか。
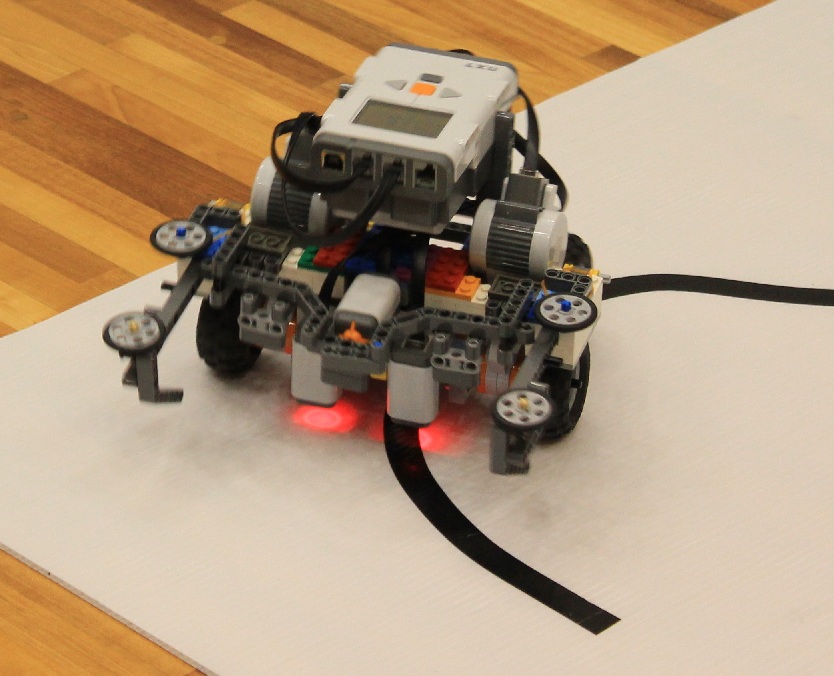
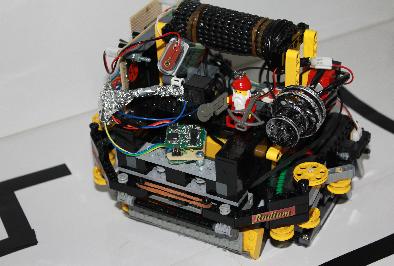
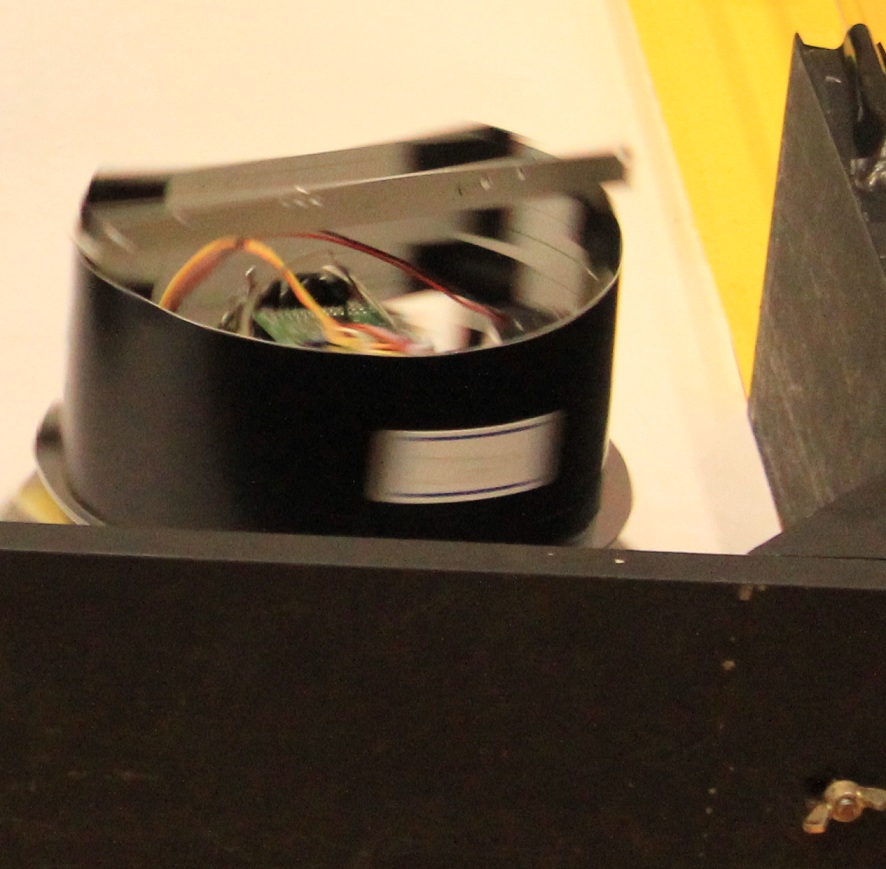
最後に「こぺるにくす」です。これもまた自作のロボットですね。プライマリの一番手でした。
ライトセンサーは前のキャスターの後ろの基盤についている黒っぽいものでしょうか。
だとするとセンサーが本体の中心付近の位置に取り付けられていることになりますね。
後ろのものは、一見取っ手のように見えますが、サーボモーターが搭載されているので、
どうやらあの取っ手そのものが缶を掴むアームになっているようです。
前後にタッチセンサーが付いているのが気になりますが何に使用するのでしょう・・・
それによくみると前後以外にもタッチセンサーがついていたり、赤外線測距センサーの姿も・・・
一見シンプルに見えて、内部ではかなり複雑な処理をしていそうなロボットでした。
千葉と言えば・・・自作!というイメージがありましたが、
実際は自作機以外にも、LEGOのロボットが結構いるなぁ。というのが正直な感想です。
それでも、自作機とLEGO以外は少なくともレスキューにはいませんでしたね。
そんな独特な雰囲気を持った千葉ノードは、凄く興味深い大会だと思いました。
来年もまた遊びに行こうかなぁ。。。
千葉ノードの見聞録は此方→
埼玉ノードに出場していたロボットの紹介は此方→
神奈川・西東京ノードに出場していたロボットの紹介は此方→
(^・ω・)ノRadiumProduction in RoboCupJunior
ジャパンオープンとしては複数人数のチームでないと世界大会への選抜は行わない。としているようです。
只、競技への参加自体は行えるようなので、出るだけなら一人でも構いませんが・・・ということみたいです。
どんどん民主的じゃなくなってきてますね。嫌な世界です。
因みに高専のロボカップは部員が少ないので
新入部員がいなければ恐らくジャパンから先にいけないチームが出てくるでしょう。
さて、どうしたものか・・・
高専と言えば、早々にも高専から関東ブロック出場のチームが1チームでることが確定したので
遠征計画の話が始まりました。どうやら後援会様の予算が残っているようなので、前泊できそうです。
ホテルがとれればだけど(笑)「実はもう既にいっぱいだったー」なんてことがないといいのですが・・・
まぁ普通に考えれば大丈夫でしょう。でもホテルから電車乗り継ぐとかありそうだな・・・
まぁ考えても仕方がありませんね。なるようになるしか。
という訳で、唐突ですが、今日は千葉ノードに出場していたロボットを何台かご紹介します。
まずは「しゅれーでぃんがーPowered Custom」のロボットです。
なんというか・・・すごく威圧感のようなものを感じるのは僕だけでしょうか。とても大きいロボットです。
去年の関東ブロックで初めて見させて頂いたのですが、
この千葉独特のロボットの造りは非常に素晴らしいですね。
個人的には特にモーターが。あのモーター最高です。音が。
そしてチーム名の通り(?)ロボット自体のパワーも強く、
このように障害物を押し倒す場面も見られました。
また、ロボット前面になにやらサーボモーターのようなものが幾つか見られます。
缶を掴む機構なのか、それともその元なのか、詳しくはわかりませんが、
これが駆動して缶を持ち上げるところが個人的にはすごく見たかったです(笑)
今回の大会では競技で一度も缶を持ち上げたロボットがいなかったのでその点はすごく残念でした。
次はプライマリで惜しくも時間差で2位になった「タイガー」です。
バンパーが凄く特徴的ですね。一体どこまでがバンパーなのでしょうね(笑)
あと前輪と後輪の幅が違うのも特徴的です。どんな仕組みになってるんだろう・・・
僕が見た限りだとライントレースは1位のロボットより早かったような気がします。なのに時間差で2位に。
恐らくその原因は「坂」なのでしょう。
作戦なのか、仕様なのかはわかりませんが、ずっと好調だったのに坂に入った途端、
いきなり速度がガクッと下がってしましました。ゆっくり、ゆっくり、
でも確実に、懸命に登っている姿は周りのギャラリーの注目を浴びていました。
こういうなんか「頑張ってる!」ロボットはやっぱり見てて応援したくなりますよね。
でも僕個人としてはこの結果を見て
「あぁ、やっぱり上位は速度が順位を分ける時代になったんだなぁ。」と痛感してしましました。
まぁ今回の場合はどちらのチームも缶をつかんでいないので、ちょっと話が変わってきますが
やっぱり昔みたいにのんびりパフォーマンスしている時間的余裕は失われてきているのでしょうか。
最後に「こぺるにくす」です。これもまた自作のロボットですね。プライマリの一番手でした。
ライトセンサーは前のキャスターの後ろの基盤についている黒っぽいものでしょうか。
だとするとセンサーが本体の中心付近の位置に取り付けられていることになりますね。
後ろのものは、一見取っ手のように見えますが、サーボモーターが搭載されているので、
どうやらあの取っ手そのものが缶を掴むアームになっているようです。
前後にタッチセンサーが付いているのが気になりますが何に使用するのでしょう・・・
それによくみると前後以外にもタッチセンサーがついていたり、赤外線測距センサーの姿も・・・
一見シンプルに見えて、内部ではかなり複雑な処理をしていそうなロボットでした。
千葉と言えば・・・自作!というイメージがありましたが、
実際は自作機以外にも、LEGOのロボットが結構いるなぁ。というのが正直な感想です。
それでも、自作機とLEGO以外は少なくともレスキューにはいませんでしたね。
そんな独特な雰囲気を持った千葉ノードは、凄く興味深い大会だと思いました。
来年もまた遊びに行こうかなぁ。。。
千葉ノードの見聞録は此方→
埼玉ノードに出場していたロボットの紹介は此方→
神奈川・西東京ノードに出場していたロボットの紹介は此方→
(^・ω・)ノRadiumProduction in RoboCupJunior
今日は赤外線測距センサーについて書こうと思います。
赤外線測距センサー、以前に測距センサーとして超音波センサーを紹介したかと思うのですが、
あれは音波を出して、それが反射して戻ってくるまでの時間を測るものでした。
この赤外線測距センサーはそうではなくて、音波の代わりに赤外線を出して、
その赤外線が戻ってくる反射量、反射角を計測するセンサーです。
よくEOPDセンサーとかPSDセンサー等と呼ばれるものですね。
因みにEOPDとはElectro Optical Proximity Detectorの略語で、
日本語にすると「電気、光学的近接センサー」という風な感じになります。
PSDはPosition Sensitive Deviceの略で日本語にすると「位置検出素子」となります。
種類によって検知できる距離の範囲が異なりますが、僕がよく使用しているのは
10~80㎝程、つまりNXTの超音波センサーを同等の検出範囲を持つ
このセンサーです。

型番はGP2Y0A21YK というもので秋月電子通商にて400円ほどで売ってます。シャープ製ですね。
これは単純にアナログの出力となっていて電源の5V、GND、信号の出力の3本線となっています。
以前に紹介したコレには2個ほど搭載されています。
コレ↑
ところで、このセンサーですが、測定対象から最低でも10㎝以上離れないと値が正しく測定できません。
大体フィールドの通路の幅が30㎝で設計されているレスキューのフィールドでは
このセンサーを左右につけてしまうと、通路ではどちらのセンサーも正しい値が返ってきません。
特に坂の前進補正なんかに使いたい場合はロボットの端につけては使いようがありません。
なのに、なんでこのロボットは、こんな一番端にセンサーを付けてしまったのでしょう・・・
謎は深まるばかりです。
結局片方しか使わなかったような・・・まぁいいか。
とりあえず今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
赤外線測距センサー、以前に測距センサーとして超音波センサーを紹介したかと思うのですが、
あれは音波を出して、それが反射して戻ってくるまでの時間を測るものでした。
この赤外線測距センサーはそうではなくて、音波の代わりに赤外線を出して、
その赤外線が戻ってくる反射量、反射角を計測するセンサーです。
よくEOPDセンサーとかPSDセンサー等と呼ばれるものですね。
因みにEOPDとはElectro Optical Proximity Detectorの略語で、
日本語にすると「電気、光学的近接センサー」という風な感じになります。
PSDはPosition Sensitive Deviceの略で日本語にすると「位置検出素子」となります。
種類によって検知できる距離の範囲が異なりますが、僕がよく使用しているのは
10~80㎝程、つまりNXTの超音波センサーを同等の検出範囲を持つ
このセンサーです。
型番はGP2Y0A21YK というもので秋月電子通商にて400円ほどで売ってます。シャープ製ですね。
これは単純にアナログの出力となっていて電源の5V、GND、信号の出力の3本線となっています。
以前に紹介したコレには2個ほど搭載されています。
コレ↑
ところで、このセンサーですが、測定対象から最低でも10㎝以上離れないと値が正しく測定できません。
大体フィールドの通路の幅が30㎝で設計されているレスキューのフィールドでは
このセンサーを左右につけてしまうと、通路ではどちらのセンサーも正しい値が返ってきません。
特に坂の前進補正なんかに使いたい場合はロボットの端につけては使いようがありません。
なのに、なんでこのロボットは、こんな一番端にセンサーを付けてしまったのでしょう・・・
謎は深まるばかりです。
結局片方しか使わなかったような・・・まぁいいか。
とりあえず今日はこの辺で
(^・ω・)ノRadiumProduction in RoboCupJunior
前回、材料の説明を行ったので今回は工具、つまり作業するときに必要なものを紹介していきます。
只、工具は材料以上に人によってバラバラな面があるので、これはあくまで僕が使っている者の紹介ですよ。
と、釘を刺しておきます。他にこれが使いやすい!というのがありましたらコメントでもしてやってください。
まずははんだ付けをする際に絶対必要になるであろうものの紹介です。

はんだごてです。
はんだを溶かしたり、熱収縮チューブを収縮させたり、どう頑張っても切れないプラスチックを溶かし切ったり、
挙句の果てには分解して暖房にして冬を越してみたり。使い所は無限大です。
うちの部活では両手に持って、
いうこと聞かない奴に押し当ててびっくりさせたり、これで目を×××・・なんて脅したりします。
最近はしてないみたいですけど。あ。もちろんコンセントは抜けてますよ。
(注:冷えていてもこて先は尖っていて危ないので、良い子はマネしないでください。)
こんなはんだごてですが、どんなものを使ったらいいのでしょうか。とよく言われますが、
大体20~30Wくらいでいいんじゃないでしょうか。
上達してきて「溶けるのが遅くて嫌だ!」という場合には40Wでも構いません。 僕は40W です。
因みに鉛フリーを使う場合、20Wじゃ溶けないor恐ろしく時間がかかるので30W以上を推奨します。
会社は100均以外ならどこでも一緒だと思います。相当変なところでない限り・・・
あと使う際には耐熱スポンジとこて台をお忘れなく。ないと机か床を燃やしますよ♪
次にニッパー

ミニニッパーと呼ばれているような小さいやつがいいですね。
細い針金のような素子の足やメッキ線を切るのに使いますからね。
あとは黒焦げになったこて先を研ぐのにも使います。
次はラジオペンチ

先が曲がっているのはめっさ使いにくいです。あれはネジ回す時以外は邪魔なだけのような。。
よくメッキ線や素子の足を曲げるの使うとか説明する人がいますが、そんなことには使いません。
っていうかそんなの無理です。
とてもじゃありませんがラジオペンチじゃそんな狭いところには届きません。
はんだ付け前の線ならともかく、基板上の線をこれでいじるなんて不可能です。
素直にマイナスドライバ-を使いましょう。
じゃあ何に使うか。
①両方の手にラジオペンチを持って
②その両方でメッキ線を掴んで
③思いっきり引っ張る!
こうやって曲がったメッキ線を
まっすぐにするのに使います。

これだけで回路の作成効率が大幅にアップする(筈)です。
最後にホットボンドです。

グルーガンとかホットメルトとか呼ばれていることもありますが全部同一です。
はんだごてほどではありませんが熱いので使用する際は気を付けましょう。
簡単に言うとはんだごての電気が流れなくてどこにでもつくバージョンみたいなものでしょうか。
要するに熱で溶けるボンドです。
回路上で絶縁したり、コード線をはんだで付けた時の補強や、コネクタの補強とかに使います。
はんだより融解温度が低いのでこれを使ってはんだが解けるということはまずないと思います。
あと、綺麗にはがすことができるのでLEGOブロックの補強にもばっちり!
だってことは言わないでおきましょう。だって見栄え悪くなるもん。
意外とくっつくときはくっつくので頼りになります。
ロボコンの時の鍵を作る際にも針金の部分で大活躍をしました。
まったく関係ないところが折れたけど(笑)

因みにボンドの方はこんな感じです。

それでは今日はこの辺で。
なんか使う工具・・・忘れてる気がする・・・
材料編→
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s
そういえばドライバーとか忘れてましたね。小っちゃくて金属のやつが便利ですよ。溶けないから♪
只、工具は材料以上に人によってバラバラな面があるので、これはあくまで僕が使っている者の紹介ですよ。
と、釘を刺しておきます。他にこれが使いやすい!というのがありましたらコメントでもしてやってください。
まずははんだ付けをする際に絶対必要になるであろうものの紹介です。
はんだごてです。
はんだを溶かしたり、熱収縮チューブを収縮させたり、どう頑張っても切れないプラスチックを溶かし切ったり、
挙句の果てには分解して暖房にして冬を越してみたり。使い所は無限大です。
うちの部活では両手に持って、
いうこと聞かない奴に押し当ててびっくりさせたり、これで目を×××・・なんて脅したりします。
最近はしてないみたいですけど。あ。もちろんコンセントは抜けてますよ。
(注:冷えていてもこて先は尖っていて危ないので、良い子はマネしないでください。)
こんなはんだごてですが、どんなものを使ったらいいのでしょうか。とよく言われますが、
大体20~30Wくらいでいいんじゃないでしょうか。
上達してきて「溶けるのが遅くて嫌だ!」という場合には40Wでも構いません。 僕は40W です。
因みに鉛フリーを使う場合、20Wじゃ溶けないor恐ろしく時間がかかるので30W以上を推奨します。
会社は100均以外ならどこでも一緒だと思います。相当変なところでない限り・・・
あと使う際には耐熱スポンジとこて台をお忘れなく。ないと机か床を燃やしますよ♪
次にニッパー
ミニニッパーと呼ばれているような小さいやつがいいですね。
細い針金のような素子の足やメッキ線を切るのに使いますからね。
あとは黒焦げになったこて先を研ぐのにも使います。
次はラジオペンチ
先が曲がっているのはめっさ使いにくいです。あれはネジ回す時以外は邪魔なだけのような。。
よくメッキ線や素子の足を曲げるの使うとか説明する人がいますが、そんなことには使いません。
っていうかそんなの無理です。
とてもじゃありませんがラジオペンチじゃそんな狭いところには届きません。
はんだ付け前の線ならともかく、基板上の線をこれでいじるなんて不可能です。
素直にマイナスドライバ-を使いましょう。
じゃあ何に使うか。
①両方の手にラジオペンチを持って
②その両方でメッキ線を掴んで
③思いっきり引っ張る!
こうやって曲がったメッキ線を
まっすぐにするのに使います。
これだけで回路の作成効率が大幅にアップする(筈)です。
最後にホットボンドです。
グルーガンとかホットメルトとか呼ばれていることもありますが全部同一です。
はんだごてほどではありませんが熱いので使用する際は気を付けましょう。
簡単に言うとはんだごての電気が流れなくてどこにでもつくバージョンみたいなものでしょうか。
要するに熱で溶けるボンドです。
回路上で絶縁したり、コード線をはんだで付けた時の補強や、コネクタの補強とかに使います。
はんだより融解温度が低いのでこれを使ってはんだが解けるということはまずないと思います。
あと、綺麗にはがすことができるのでLEGOブロックの補強にもばっちり!
だってことは言わないでおきましょう。だって見栄え悪くなるもん。
意外とくっつくときはくっつくので頼りになります。
ロボコンの時の鍵を作る際にも針金の部分で大活躍をしました。
まったく関係ないところが折れたけど(笑)
因みにボンドの方はこんな感じです。
それでは今日はこの辺で。
なんか使う工具・・・忘れてる気がする・・・
材料編→
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s
そういえばドライバーとか忘れてましたね。小っちゃくて金属のやつが便利ですよ。溶けないから♪
レスキュー競技に参加していたロボットの紹介は此方
タイトルはノード長の青木先生から頂ました(笑)
唐突ですが、暇だったので千葉ノードに遊びにいってきました。
えっと・・・会場は・・・子ども交流館・・・うーん。船橋か市川あたりかなぁ。なんて思っていました。
ところが、サイトを見てびっくり。
最寄駅→千葉駅
あっ。こっこ遠い(笑)
でも総武線がきてるので電車で簡単に行けますね。よかった。変な所じゃなくて。
実際のところ、行きは総武線で寝たので1時間半。
帰りは快特乗ったので一時間ちょいで帰れました。
東京ノードの会場なんか交通の便が悪くて悪くてしょうがないから・・・(注:うちの高専です。)
駅で降りて、花粉と戦いながら迷う歩くこと20分。(途中でコンビニ寄りました。)
会場に到着です。

うわぁ。地震起きたらガラスとかで一発で死ねるな。(評価するところが違う←)
でもあれですね。東京より花粉が少ないようで、思ったより楽に歩けました。
ところが入ってすぐのところで思わぬ展開に。
いきなり中から出てきたM&YParentsと遭遇してしましました。今日はなにか展開が速いです。
昼食に行くとのことだったのでそのまま別れて僕は会場に向かいます。
着いてまず最初に思ったこと。
「全部の競技が同じ部屋で行われるのっていいなぁ。」
見る側としてはすごく楽じゃないですか。東京はバラバラなのでほかのところに行くのも一苦労です。
去年の関東なんか、塔が違ったので他の競技はどこでやってるのかすら知らないという惨状でしたから・・・。
久しぶりにロボカップの競技3つ全てを見ることができたような気がします。
まずはサッカー。
かつてのマルチ仲間である、
「こりおり」が参加していました。
2台とも完全な自作機ですね。流石です。
一台は今上の写真にある黒いロボットで、これが徹夜の原因だったそうです。
そしてもう一台は大回転を見せてくれた此方のロボットです。
2台ともにガンローラーというラジコンに付属されているオムニホイールを使用し、
制御はSHマイコンで行われていました。
プレゼンでは磁場の影響を受けやすい地磁気センサー(コンパスセンサー)に代わって
ジャイロセンサーで方向を判断するという点を強調してい・・まし・・た?。
うん。たぶんそうだった気がします。確かに基本的に方向を見るのはコンパスが主流なので、
この方法はなんか親近感みたいなものがありました。
因みに、徹夜の原因のロボットのほうは前半まったく動かず、大回転のほうだけがかなり動き回っていました。
シューターが凄くよかったなってのが正直な感想です。
でも後半は大回転が動かず、逆に徹夜の方がちょくちょく動いてるところが見られました。
一日でここまで動かしたのですから、相当すごいなぁと思いました。
こりおりを含めてサッカーは全3チーム。リーグ戦をやっても3試合にしかならない為、
すごくゆったりとしたスケジュールでしたね。
ダンスなんか1チームでしたけど・・・
あと千葉にはロボカップの入門編?みたいな感じの「ライントレース」という競技があります。
色々なロボットがいましたが、特に
このロボットと
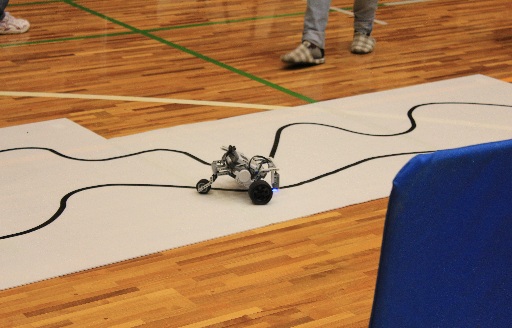
このロボットの

動きが凄く面白かったです。正直この大会のなかで一番いい動きしていたロボットのような気がします。
ライントレースはあまり見れなかったのでまともな記事が書けません。スミマセン。
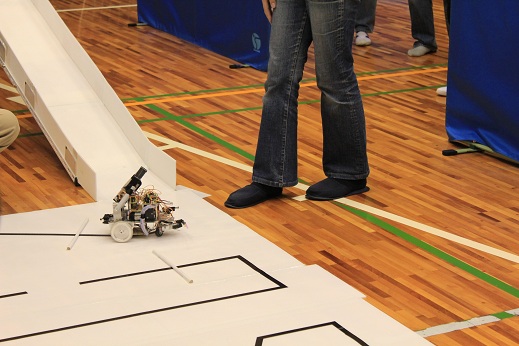
という訳で次はレスキューの話になります。
こんな感じのフィールドでした。机の上に2階があって左奥に救出エリア?がありました。

千葉ノードはプラ6セカ5の合計11チームで行われました。
ブロック大会や、東東京、神奈川西東京ノードと違って競技がひとり2回行われました。
順位は両方の合計で決まるのかな?ちょっと聞き忘れてしまいました。
どちらか良い方の得点で順位付けされたようです。
それで競技の方ですが・・・
レスキューは・・・なんか、凄かったです。
上下の差が明確に出ちゃっているような・・・2010ルールの問題点ですね。
得点の期待値に対して、減点ウェイトが高すぎるとでも言いましょうか。
つまり一回でもミスをするとすぐに得点がマイナスになってしまうような仕組みになっているのです。
実際僕は初めてこの2010ルールでの競技をちゃんと見させて頂いたのですが、やっぱりこれ問題あるね。
なにかひとつでもできない課題がある=得点がマイナスになる。という等式が成り立ちかけている気がします。
まぁ2009ルールでも同じ現象がありましたが・・・
これが2011ルールだと解決しているのですが、また違った問題が・・・
まぁ「ルールに文句言うやつは競技をする資格がない」とかいいますのでこれ以上は何も言いませんが・・・
でも1回目の競技より2回目の競技の方が点数が伸びたチームが多かったですね。
特にセカンダリは全チーム伸びたんじゃないかな。
それでも今回の競技、プラ、セカ通して被災者がアリーナを転がりまわることはありましたが、
誰一人として救出ができなかったのはちょっと残念です。
でもロボット自体の機械の完成度はいいものが多かったので、
プログラム、あるいは回路をもう少し頑張れたらもっと伸びただろうな・・・と思います。
とりあえず長くなったので今回はこの辺で。
レスキューのロボットの紹介はするかしないかは未定ですが、
とりあえずどのロボットがどのチームなのかを調べないと・・・
あと、ダンスについての紹介はネタバレ含むことになってしまうので見送りとさせていただきます。
機会があればまた今度紹介しようかな。
最後に、皆さん本日は本当にお疲れ様でした。見る側の立場はやっぱり面白いです。ありがとうございました。
因みに帰りは秋葉によって帰りました。
僕は悪くない!帰り道に秋葉があるのが悪いんだ!
埼玉ノード見聞録は此方→
神奈川・西東京ノード疲れた録は此方→
東東京ノード終了しました。録は此方→
(^・ω・)ノRadiumProduction in RoboCupJunior
タイトルはノード長の青木先生から頂ました(笑)
唐突ですが、暇だったので千葉ノードに遊びにいってきました。
えっと・・・会場は・・・子ども交流館・・・うーん。船橋か市川あたりかなぁ。なんて思っていました。
ところが、サイトを見てびっくり。
最寄駅→千葉駅
あっ。こっこ遠い(笑)
でも総武線がきてるので電車で簡単に行けますね。よかった。変な所じゃなくて。
実際のところ、行きは総武線で寝たので1時間半。
帰りは快特乗ったので一時間ちょいで帰れました。
東京ノードの会場なんか交通の便が悪くて悪くてしょうがないから・・・(注:うちの高専です。)
駅で降りて、花粉と戦いながら迷う歩くこと20分。(途中でコンビニ寄りました。)
会場に到着です。
うわぁ。地震起きたらガラスとかで一発で死ねるな。(評価するところが違う←)
でもあれですね。東京より花粉が少ないようで、思ったより楽に歩けました。
ところが入ってすぐのところで思わぬ展開に。
いきなり中から出てきたM&YParentsと遭遇してしましました。今日はなにか展開が速いです。
昼食に行くとのことだったのでそのまま別れて僕は会場に向かいます。
着いてまず最初に思ったこと。
「全部の競技が同じ部屋で行われるのっていいなぁ。」
見る側としてはすごく楽じゃないですか。東京はバラバラなのでほかのところに行くのも一苦労です。
去年の関東なんか、塔が違ったので他の競技はどこでやってるのかすら知らないという惨状でしたから・・・。
久しぶりにロボカップの競技3つ全てを見ることができたような気がします。
まずはサッカー。
かつてのマルチ仲間である、
「こりおり」が参加していました。
2台とも完全な自作機ですね。流石です。
一台は今上の写真にある黒いロボットで、これが徹夜の原因だったそうです。
そしてもう一台は大回転を見せてくれた此方のロボットです。
2台ともにガンローラーというラジコンに付属されているオムニホイールを使用し、
制御はSHマイコンで行われていました。
プレゼンでは磁場の影響を受けやすい地磁気センサー(コンパスセンサー)に代わって
ジャイロセンサーで方向を判断するという点を強調してい・・まし・・た?。
うん。たぶんそうだった気がします。確かに基本的に方向を見るのはコンパスが主流なので、
この方法はなんか親近感みたいなものがありました。
因みに、徹夜の原因のロボットのほうは前半まったく動かず、大回転のほうだけがかなり動き回っていました。
シューターが凄くよかったなってのが正直な感想です。
でも後半は大回転が動かず、逆に徹夜の方がちょくちょく動いてるところが見られました。
一日でここまで動かしたのですから、相当すごいなぁと思いました。
こりおりを含めてサッカーは全3チーム。リーグ戦をやっても3試合にしかならない為、
すごくゆったりとしたスケジュールでしたね。
ダンスなんか1チームでしたけど・・・
あと千葉にはロボカップの入門編?みたいな感じの「ライントレース」という競技があります。
色々なロボットがいましたが、特に
このロボットと
このロボットの
動きが凄く面白かったです。正直この大会のなかで一番いい動きしていたロボットのような気がします。
ライントレースはあまり見れなかったのでまともな記事が書けません。スミマセン。
という訳で次はレスキューの話になります。
こんな感じのフィールドでした。机の上に2階があって左奥に救出エリア?がありました。
千葉ノードはプラ6セカ5の合計11チームで行われました。
ブロック大会や、東東京、神奈川西東京ノードと違って競技がひとり2回行われました。
順位は両方の合計で決まるのかな?ちょっと聞き忘れてしまいました。
どちらか良い方の得点で順位付けされたようです。
それで競技の方ですが・・・
レスキューは・・・なんか、凄かったです。
上下の差が明確に出ちゃっているような・・・2010ルールの問題点ですね。
得点の期待値に対して、減点ウェイトが高すぎるとでも言いましょうか。
つまり一回でもミスをするとすぐに得点がマイナスになってしまうような仕組みになっているのです。
実際僕は初めてこの2010ルールでの競技をちゃんと見させて頂いたのですが、やっぱりこれ問題あるね。
なにかひとつでもできない課題がある=得点がマイナスになる。という等式が成り立ちかけている気がします。
まぁ2009ルールでも同じ現象がありましたが・・・
これが2011ルールだと解決しているのですが、また違った問題が・・・
まぁ「ルールに文句言うやつは競技をする資格がない」とかいいますのでこれ以上は何も言いませんが・・・
でも1回目の競技より2回目の競技の方が点数が伸びたチームが多かったですね。
特にセカンダリは全チーム伸びたんじゃないかな。
それでも今回の競技、プラ、セカ通して被災者がアリーナを転がりまわることはありましたが、
誰一人として救出ができなかったのはちょっと残念です。
でもロボット自体の機械の完成度はいいものが多かったので、
プログラム、あるいは回路をもう少し頑張れたらもっと伸びただろうな・・・と思います。
とりあえず長くなったので今回はこの辺で。
レスキューのロボットの紹介はするかしないかは未定ですが、
とりあえずどのロボットがどのチームなのかを調べないと・・・
あと、ダンスについての紹介はネタバレ含むことになってしまうので見送りとさせていただきます。
機会があればまた今度紹介しようかな。
最後に、皆さん本日は本当にお疲れ様でした。見る側の立場はやっぱり面白いです。ありがとうございました。
因みに帰りは秋葉によって帰りました。
僕は悪くない!帰り道に秋葉があるのが悪いんだ!
埼玉ノード見聞録は此方→
神奈川・西東京ノード疲れた録は此方→
東東京ノード終了しました。録は此方→
(^・ω・)ノRadiumProduction in RoboCupJunior
どうやら滑り込みで増えに増えて
最終的にレスキューセカンダリは20チームほどになりましたね。
東東京ノードブログでは18となっていましたがその後5時間で増えたのでしょうか。
さて、ブロック大会への選考基準が変わったせいで人数が多い
東京と神奈川は不利になりましたが、
それでも東京都神奈川の実力は未だに衰えることを知りませんね。
さて、今年はどんなチームがこの2大会からでてくるのでしょうか。
・・・と。おっと。その前に
忘れちゃいけない。明日は千葉ノードがありますね。
千葉と言えば、自作、千葉と言えばステッピングモーター!(勝手な偏見です。)
どんな面白いロボットがどんな面白い動きを見せてくれるのか・今から非常に楽しみです。
どうやら大量に滑り込みをかけたのは八潮軍団のようですね。
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s 最終結果:19チームだそうです。
うわ。関東全体だとレスキューだけで40チーム以上あるよ・・・
最終的にレスキューセカンダリは20チームほどになりましたね。
東東京ノードブログでは18となっていましたがその後5時間で増えたのでしょうか。
さて、ブロック大会への選考基準が変わったせいで人数が多い
東京と神奈川は不利になりましたが、
それでも東京都神奈川の実力は未だに衰えることを知りませんね。
さて、今年はどんなチームがこの2大会からでてくるのでしょうか。
・・・と。おっと。その前に
忘れちゃいけない。明日は千葉ノードがありますね。
千葉と言えば、自作、千葉と言えばステッピングモーター!(勝手な偏見です。)
どんな面白いロボットがどんな面白い動きを見せてくれるのか・今から非常に楽しみです。
どうやら大量に滑り込みをかけたのは八潮軍団のようですね。
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s 最終結果:19チームだそうです。
うわ。関東全体だとレスキューだけで40チーム以上あるよ・・・
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
(01/01)
(05/07)
(01/11)
プロフィール
HN:
Luz
性別:
男性
アーカイブ