RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
東東京ノードと、神奈川、西東京ノードのエントリー締め切りの日がやって参りました。
あと約21時間。レスキューのチーム数はこのまま動かないのでしょうか。
セカンダリは12人。恐らくこの中に高専入学予定者もいることでしょう。
どんな大会になることやら、今から非常に楽しみです。
あ。でもその前に明後日千葉ノードがありますよね。
話によるとかなりレベルが高いロボットが多いのだとか・・・
さて、どのチームが関東への切符を手にするのか、今から非常に楽しみです。(大事なことなので2度ry)
ところで、東東京ノード、神奈川西東京ノードに出場する方に朗報です。
去年、両大会では高専の9年物のアリーナを使用していました。
しかし、老朽化と、2010ルールにある「タイル」に対応するために
新しくアリーナを新調しています。
まだそのアリーナは制作途中だそうで、納品は大会直前になるとの見通しです。
まったく新しいフィールドでのまったく新しい競技、ますます面白くなってきました。
因みに材質の変更で坂が以前のものより格段に滑りやすいとかなんとかという噂も・・・
まぁ皆さん、新しいアリーナの門出を祝うためにも(?)、悔いの残らないように頑張ってください♪
因みに今のフィールドは引き取ってもらうそうです。うちにおいてもいいんだけどなー。無理か。
(^・ω・)ノRadiumProduction in RoboCupJunior
あと約21時間。レスキューのチーム数はこのまま動かないのでしょうか。
セカンダリは12人。恐らくこの中に高専入学予定者もいることでしょう。
どんな大会になることやら、今から非常に楽しみです。
あ。でもその前に明後日千葉ノードがありますよね。
話によるとかなりレベルが高いロボットが多いのだとか・・・
さて、どのチームが関東への切符を手にするのか、今から非常に楽しみです。(大事なことなので2度ry)
ところで、東東京ノード、神奈川西東京ノードに出場する方に朗報です。
去年、両大会では高専の9年物のアリーナを使用していました。
しかし、老朽化と、2010ルールにある「タイル」に対応するために
新しくアリーナを新調しています。
まだそのアリーナは制作途中だそうで、納品は大会直前になるとの見通しです。
まったく新しいフィールドでのまったく新しい競技、ますます面白くなってきました。
因みに材質の変更で坂が以前のものより格段に滑りやすいとかなんとかという噂も・・・
まぁ皆さん、新しいアリーナの門出を祝うためにも(?)、悔いの残らないように頑張ってください♪
因みに今のフィールドは引き取ってもらうそうです。うちにおいてもいいんだけどなー。無理か。
(^・ω・)ノRadiumProduction in RoboCupJunior
こんなやつですね。NXTの標準的なセンサーの形状とはちょっと違いますね。

片方の穴から超音波、つまり人の耳では聞こえない、可聴音外の音を出しています。
その出した超音波を、もう片方の穴で検出しています。
つまり、片方の穴から超音波を出してそれが壁にあたって跳ね返ってもう片方の穴で検知しており、
その跳ね返ってくるまでの時間を測定することで、壁までの大体の距離を測定するというセンサーです。
音の大きさを測定している訳ではないので、どんな形の物体であれ、一点でも音を跳ね返すことができたら
その物体を検知することができます。
つまり球体や円柱は検知できないというのは偏見です。
でも、あまり物体が近かったりすると近すぎて音波が隣の穴に届くのに時間がかかったり、
逆にあまりに遠かったりすると、音波が届かなかったりしてうまく測定ができません。
このセンサーだと大体6~90㎝ぐらいの範囲を超えると値が正しく測定できなくなるようです。
また、NXC等の言語プログラムを利用している方は
NXTの超音波センサーはI2C接続であると思っている方が多いようですが、
あれはI2Cに似てるけどI2Cでも疑似I2C でもありません。つまり、I2Cとして使うことはできません。
NXTのI2C命令で超音波センサーを動かすことができてしまうので勘違いが多いようです。
でもあれは固有のアドレスというものが存在しないので、他のセンサーとの併用ができないみたいです。
ただし、この超音波センサー単体を他のマイコン等でI2Cとして制御することはできるようです。
この場合はアドレスは0x02のみで行えるとの話でした。まぁ僕が試していないのでわかりませんが(笑)
もちろんI2Cと同様の通信を疑似的に行っているのでアナログセンサーに比べて動作は遅いですね。
疑似的とはいえ、ここまで遅いと鬱になりますね。大体40~50msかかっているようです。
PICなら1msかからないのに・・・
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCup Junior
片方の穴から超音波、つまり人の耳では聞こえない、可聴音外の音を出しています。
その出した超音波を、もう片方の穴で検出しています。
つまり、片方の穴から超音波を出してそれが壁にあたって跳ね返ってもう片方の穴で検知しており、
その跳ね返ってくるまでの時間を測定することで、壁までの大体の距離を測定するというセンサーです。
音の大きさを測定している訳ではないので、どんな形の物体であれ、一点でも音を跳ね返すことができたら
その物体を検知することができます。
つまり球体や円柱は検知できないというのは偏見です。
でも、あまり物体が近かったりすると近すぎて音波が隣の穴に届くのに時間がかかったり、
逆にあまりに遠かったりすると、音波が届かなかったりしてうまく測定ができません。
このセンサーだと大体6~90㎝ぐらいの範囲を超えると値が正しく測定できなくなるようです。
また、NXC等の言語プログラムを利用している方は
NXTの超音波センサーはI2C接続であると思っている方が多いようですが、
あれはI2Cに似てるけどI2Cでも疑似I2C でもありません。つまり、I2Cとして使うことはできません。
NXTのI2C命令で超音波センサーを動かすことができてしまうので勘違いが多いようです。
でもあれは固有のアドレスというものが存在しないので、他のセンサーとの併用ができないみたいです。
ただし、この超音波センサー単体を他のマイコン等でI2Cとして制御することはできるようです。
この場合はアドレスは0x02のみで行えるとの話でした。まぁ僕が試していないのでわかりませんが(笑)
もちろんI2Cと同様の通信を疑似的に行っているのでアナログセンサーに比べて動作は遅いですね。
疑似的とはいえ、ここまで遅いと鬱になりますね。大体40~50msかかっているようです。
PICなら1msかからないのに・・・
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCup Junior
まさにスピード決着でした。
会議とかせずに、メンターだけお願いして、勢いで登録してしまいました。
とりあえず高専からは4チームが東東京ノードにエントリーすることになりました。
東東京ノード長が同じ学校にいるので一応確認しましたが、ちゃんと登録されているようでした。
これで一先ずはよかった。
あとは出るだけですね。
(^・ω・)ノRadiumProduction in RoboCupJunior
会議とかせずに、メンターだけお願いして、勢いで登録してしまいました。
とりあえず高専からは4チームが東東京ノードにエントリーすることになりました。
東東京ノード長が同じ学校にいるので一応確認しましたが、ちゃんと登録されているようでした。
これで一先ずはよかった。
あとは出るだけですね。
(^・ω・)ノRadiumProduction in RoboCupJunior
自作センサー程度の作成だったら回路は必要ないかもしれませんが、PICと通信させたり、
センサー増設基盤をつくったりするには、やっぱり回路の知識。必要ですよね。
ということでCircuitカテゴリーではこういったロボカップで使える回路知識(?)
みたいなことについて記載していこうと思います。
前回、アナログとデジタルの話をして、
アナログのセンサーは全てデジタルに変換して扱わなくてはならないということがわかって頂けたと思います。
それでアナログをデジタルに変換することをA/D変換といって
これをする機械をA/Dコンバーターといいいます。
でも、これは実はNXT内部についてたりしているので
アナログの自作センサーをつける程度のことしかしないのであれば、考えなくていい内容ですね。
PICとかAVRとかする際は少し気にした方がいいかも。でも基本的に内蔵されています。
という話があったかと思います。
それで今回なのですが、タイトルの通り、回路制作にあたって必要なもの、特に消耗品について紹介します。
それではまず最初は・・・
半田

鈴とか、鉛とか、銅とか、銀とかで作られています。ものによってこれの比率が違います。銀半田超高いです。
ものによりますが、大体200~400℃くらいで溶けるようにできていて、
云わば「電気を通す接着剤」といったところでしょうか。
まぁ説明するまでもなく殆どの方がこれがなんなのかはわかるでしょうけど。
最近では鉛が有毒なので、鉛のはいっていない鉛フリーはんだというものが一般的なようです。
ちなみにうちの部活は鉛バンバン入っています。寿命縮むね。
次にスズメッキ線です。

これはユニバーサル基盤で回路を作る上では半田と同じくらい重要です。
何に使うかというと、半田とセットで素子の足と足をつなぐことに主に使われます。
はんだが接着剤ならメッキ線は電気の通る回路のフレームとでもいいましょうか。
次にユニバーサル基盤です。
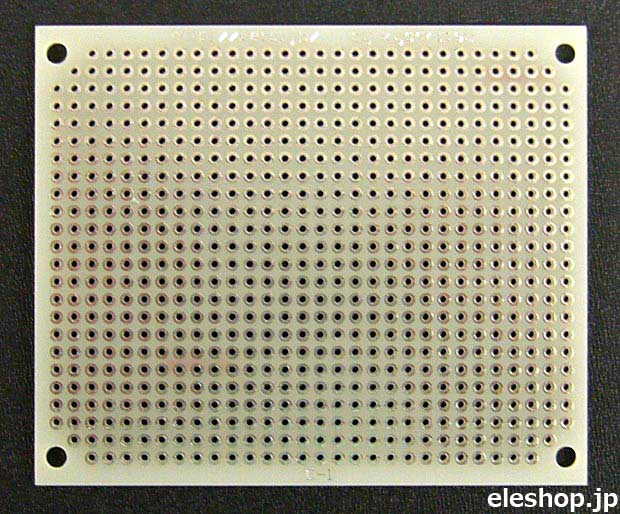
先ほどからちょくちょく出てきている意味不明な単語の正体はこれです。
基本的に2.54㎜の間隔(ピッチ)で穴があいています。
銅箔のある方、つまり写真の方が裏で、銅箔がない方が表です。
これに表から素子の足(線のこと)を指して裏で銅箔と、はんだづけしてメッキ線でつなぐ・・・と
回路の基本はこんな感じです。
あとはリード線とかも使ったりします。

あとは回路に搭載する素子ですが・・・
これはひとつずつ説明の必要があるのでまた今度ということでー。
ではこのへんでー。
工具編→
(^・ω・)ノRadiumProduction in RoboCupJunior
センサー増設基盤をつくったりするには、やっぱり回路の知識。必要ですよね。
ということでCircuitカテゴリーではこういったロボカップで使える回路知識(?)
みたいなことについて記載していこうと思います。
前回、アナログとデジタルの話をして、
アナログのセンサーは全てデジタルに変換して扱わなくてはならないということがわかって頂けたと思います。
それでアナログをデジタルに変換することをA/D変換といって
これをする機械をA/Dコンバーターといいいます。
でも、これは実はNXT内部についてたりしているので
アナログの自作センサーをつける程度のことしかしないのであれば、考えなくていい内容ですね。
PICとかAVRとかする際は少し気にした方がいいかも。でも基本的に内蔵されています。
という話があったかと思います。
それで今回なのですが、タイトルの通り、回路制作にあたって必要なもの、特に消耗品について紹介します。
それではまず最初は・・・
半田
鈴とか、鉛とか、銅とか、銀とかで作られています。ものによってこれの比率が違います。銀半田超高いです。
ものによりますが、大体200~400℃くらいで溶けるようにできていて、
云わば「電気を通す接着剤」といったところでしょうか。
まぁ説明するまでもなく殆どの方がこれがなんなのかはわかるでしょうけど。
最近では鉛が有毒なので、鉛のはいっていない鉛フリーはんだというものが一般的なようです。
ちなみにうちの部活は鉛バンバン入っています。寿命縮むね。
次にスズメッキ線です。
これはユニバーサル基盤で回路を作る上では半田と同じくらい重要です。
何に使うかというと、半田とセットで素子の足と足をつなぐことに主に使われます。
はんだが接着剤ならメッキ線は電気の通る回路のフレームとでもいいましょうか。
次にユニバーサル基盤です。
先ほどからちょくちょく出てきている意味不明な単語の正体はこれです。
基本的に2.54㎜の間隔(ピッチ)で穴があいています。
銅箔のある方、つまり写真の方が裏で、銅箔がない方が表です。
これに表から素子の足(線のこと)を指して裏で銅箔と、はんだづけしてメッキ線でつなぐ・・・と
回路の基本はこんな感じです。
あとはリード線とかも使ったりします。
あとは回路に搭載する素子ですが・・・
これはひとつずつ説明の必要があるのでまた今度ということでー。
ではこのへんでー。
工具編→
(^・ω・)ノRadiumProduction in RoboCupJunior
部活会議中止で本気でメンターが決まらないです。締め切りが26日で土曜だから、あと2日。
今年の高専からの出場はゼロになる確率が高そうです。
明日、もっぺん顧問の先生方に話をしてみようと思っていますが、どうなることやら・・・。
今日はロボットに坂を上らせようと一日頑張ったのですが、
あえなく撃沈。
・・・どうしてこうなった。
やっぱりクローラーが滑るんですね。やっぱりタイヤの方がよかったかな・・・
まぁ今更変えるのもちょっと無謀なので東東京大会までにはなんとか動くように・・・と考えています。
あと不安なのが、2010ルールは今までと違ってコースがタイルですよね。
タイルということはもしかしたら競技中にもコースが変わる可能性が・・・
タイルをやったことない人間にとって、タイルを使ってのライントレースは・・・全く予想ができません。
タイルがめくれあがってコースアウトとか絶対やりそう・・・
人が絶対やらないような驚異的なミスを大会の競技で行うのが通年の僕ですから・・・
なんて数々の不安要素が襲っている今日この頃です。
まぁそれ以前にライントレースができてないので問題外ですが。
あと一か月。さて。どこまでいけるでしょうか。
という訳で今日はこの辺で。
因みにタイルがめくれあがって進行停止はシンガポールでのレスキューBで経験済みだったり。
一度めくれると元に戻せないから、ラインのあるタイルがめくれると絶望的だよね。
(^・ω・)ノRadiumProduction in RoboCupJunior
今年の高専からの出場はゼロになる確率が高そうです。
明日、もっぺん顧問の先生方に話をしてみようと思っていますが、どうなることやら・・・。
今日はロボットに坂を上らせようと一日頑張ったのですが、
あえなく撃沈。
・・・どうしてこうなった。
やっぱりクローラーが滑るんですね。やっぱりタイヤの方がよかったかな・・・
まぁ今更変えるのもちょっと無謀なので東東京大会までにはなんとか動くように・・・と考えています。
あと不安なのが、2010ルールは今までと違ってコースがタイルですよね。
タイルということはもしかしたら競技中にもコースが変わる可能性が・・・
タイルをやったことない人間にとって、タイルを使ってのライントレースは・・・全く予想ができません。
タイルがめくれあがってコースアウトとか絶対やりそう・・・
人が絶対やらないような驚異的なミスを大会の競技で行うのが通年の僕ですから・・・
なんて数々の不安要素が襲っている今日この頃です。
まぁそれ以前にライントレースができてないので問題外ですが。
あと一か月。さて。どこまでいけるでしょうか。
という訳で今日はこの辺で。
因みにタイルがめくれあがって進行停止はシンガポールでのレスキューBで経験済みだったり。
一度めくれると元に戻せないから、ラインのあるタイルがめくれると絶望的だよね。
(^・ω・)ノRadiumProduction in RoboCupJunior
結局、どちらがいいのでしょうね。
僕は今、NXTを使っています。でも去年まではRCXを使用していました。
学校のNXTがあったのに、あえてRCXを使用しました。
しかし生産終了もあり、もう最近ではRCXでロボットを作っている人は余り見かけなくなりましたね。
LEGOのロボットは大抵がNXTです。
「新しいから」と言う理由だけで乗り換えた人もいるでしょうが、RCXでも十分強いロボットは作れます。
さて、RCXとNXT。登場した年は約10年離れています。
10年の年代差はどのような違いを生むのか、今日はその違いを具体的に挙げていこうと思います。
まずは、入力、RCXはアナログの3ポートのみ、
NXTは4ポート。
しかも1ポートにアナログのポートとI2CとRS485が使用できる2線シリアルポートの2種類が含まれていて、
(RS485は現在ポート4のみ対応のようです)
実質的には合計8ポートとなっています。
しかもI2Cを使えば、使用できるセンサーの数は3桁に跳ね上がります。
そして出力。ポート数は同じですが、NXTには回転角度検知の信号線が含まれており、
その上RCXが500mAしか流せないのに比べて、
NXTは電池の流せる限界ギリギリの電流まで流すことができるようです。
更に処理。RCXは1つの処理を行うのに「何故か」6ms(0.006秒)もかかりますが、
NXTは最低でも0.1μs(0.0000001秒)以下の速度で処理を行えます。(恐らくもっと早い。今度調べてみます)
また、プログラムのダウンロードも無線のRCXに比べて有線のNXTは格段に速く、
また、メモリの量(プラグラムの入る大きさ)もNXTのほうがだいぶ大きいです。
それにしてもRCXの通信が無線(正確には赤外線)というあたりには、やっぱり古さを感じさせますね。
無線といったら古いというイメージが頭の中で固定してて・・・(笑)
このように性能だけで考えればNXTのほうが圧倒的ですね。まぁ10年・・・当たり前ですが。
でもいいことばっかりではないんですよ。
NXTにあってRCXない弱点もいっぱいあります
例えば・・・
・大きすぎる
・プログラムソフトが不十分
・電池がすぐなくなる(乾電池で2時間で切れるくらいです)
・本体仕様に不明な点がある
・クローラーがすべる(坂で)
・重い
・基本的にペグで組まなくてはいけないので少し難しい
・うるさい(夜中に動かすと怒られる)
・部品がRCX時代に比べてちゃっちい(ような気がする)
・モーターの回転方向がプログラムでしか変えられない
・コードが邪魔(太い)
・電流量の問題でモーターのパワーを最大にすると電源が落ちる。(ことがある)
まぁこんなかんじ、上げればキリがないですね。
要するに新しいだけが全てじゃない。と言うわけです。
それでも今年はNXTなんですけどね。
それではーノ
(^・ω・)ノRadiumProduction in RoboCupJunior
僕は今、NXTを使っています。でも去年まではRCXを使用していました。
学校のNXTがあったのに、あえてRCXを使用しました。
しかし生産終了もあり、もう最近ではRCXでロボットを作っている人は余り見かけなくなりましたね。
LEGOのロボットは大抵がNXTです。
「新しいから」と言う理由だけで乗り換えた人もいるでしょうが、RCXでも十分強いロボットは作れます。
さて、RCXとNXT。登場した年は約10年離れています。
10年の年代差はどのような違いを生むのか、今日はその違いを具体的に挙げていこうと思います。
まずは、入力、RCXはアナログの3ポートのみ、
NXTは4ポート。
しかも1ポートにアナログのポートとI2CとRS485が使用できる2線シリアルポートの2種類が含まれていて、
(RS485は現在ポート4のみ対応のようです)
実質的には合計8ポートとなっています。
しかもI2Cを使えば、使用できるセンサーの数は3桁に跳ね上がります。
そして出力。ポート数は同じですが、NXTには回転角度検知の信号線が含まれており、
その上RCXが500mAしか流せないのに比べて、
NXTは電池の流せる限界ギリギリの電流まで流すことができるようです。
更に処理。RCXは1つの処理を行うのに「何故か」6ms(0.006秒)もかかりますが、
NXTは最低でも0.1μs(0.0000001秒)以下の速度で処理を行えます。(恐らくもっと早い。今度調べてみます)
また、プログラムのダウンロードも無線のRCXに比べて有線のNXTは格段に速く、
また、メモリの量(プラグラムの入る大きさ)もNXTのほうがだいぶ大きいです。
それにしてもRCXの通信が無線(正確には赤外線)というあたりには、やっぱり古さを感じさせますね。
無線といったら古いというイメージが頭の中で固定してて・・・(笑)
このように性能だけで考えればNXTのほうが圧倒的ですね。まぁ10年・・・当たり前ですが。
でもいいことばっかりではないんですよ。
NXTにあってRCXない弱点もいっぱいあります
例えば・・・
・大きすぎる
・プログラムソフトが不十分
・電池がすぐなくなる(乾電池で2時間で切れるくらいです)
・本体仕様に不明な点がある
・クローラーがすべる(坂で)
・重い
・基本的にペグで組まなくてはいけないので少し難しい
・うるさい(夜中に動かすと怒られる)
・部品がRCX時代に比べてちゃっちい(ような気がする)
・モーターの回転方向がプログラムでしか変えられない
・コードが邪魔(太い)
・電流量の問題でモーターのパワーを最大にすると電源が落ちる。(ことがある)
まぁこんなかんじ、上げればキリがないですね。
要するに新しいだけが全てじゃない。と言うわけです。
それでも今年はNXTなんですけどね。
それではーノ
(^・ω・)ノRadiumProduction in RoboCupJunior
1ヶ月ぶりの活動でした。そして大会までもあと1ヶ月。
まぁ恐らく東東京ノードには間に合わないでしょう。
東東京ノード突破は果たして実現なるか・・・非常に危ぶまれるところです。
でも、なんだか知りませんが「今年の東東京レスキューセカンダリは穴場だ」と巷では言われているようです。
要するに去年の全体の成績が芳しくなかったからでしょう。
215点満点のコースで118点で優勝するってどうよ・・・
どう考えても普通じゃないですよね。言われるのも無理ないです。
しかも、この点ではプライマリだと5位になってしまいますね。
東東京セカンダリ軍団の皆さん。ちょっとこれはマズくないですが!?
まぁ一年も前の話を今更掘り出しても仕方がない訳ですけど。
しかもこの時の優勝は自分なので、とても濃い自虐ネタになってしまっています。
という訳で今年はがんばりましょうね(汗
それで今年なのですが、うちの高専の生徒は今、
出場が危ぶまれています(笑)
何故か。単純にメンターがいないからです。
毎年メンターは部活の顧問の先生にお願いしていたのですが、
今年はどうも、頼める人が・・・いない?
5年生の卒論の提出やら期末試験の日程の変更やらで、
ここ数か月、一部の先生を除いてまったく教員と会話ができない状態だった。ていうか今もそういう状態です。
特に今は研究室にも入れない・・・(笑)
という訳で部活会議が今までできず、誰にメンターをやって頂くのかが決まっていないのです。
急きょ明後日会議することになりそうですが、ここで決まらなかったら高専からの出場はなしになりますね。
さてと、どうしたものやら・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
まぁ恐らく東東京ノードには間に合わないでしょう。
東東京ノード突破は果たして実現なるか・・・非常に危ぶまれるところです。
でも、なんだか知りませんが「今年の東東京レスキューセカンダリは穴場だ」と巷では言われているようです。
要するに去年の全体の成績が芳しくなかったからでしょう。
215点満点のコースで118点で優勝するってどうよ・・・
どう考えても普通じゃないですよね。言われるのも無理ないです。
しかも、この点ではプライマリだと5位になってしまいますね。
東東京セカンダリ軍団の皆さん。ちょっとこれはマズくないですが!?
まぁ一年も前の話を今更掘り出しても仕方がない訳ですけど。
しかもこの時の優勝は自分なので、とても濃い自虐ネタになってしまっています。
という訳で今年はがんばりましょうね(汗
それで今年なのですが、うちの高専の生徒は今、
出場が危ぶまれています(笑)
何故か。単純にメンターがいないからです。
毎年メンターは部活の顧問の先生にお願いしていたのですが、
今年はどうも、頼める人が・・・いない?
5年生の卒論の提出やら期末試験の日程の変更やらで、
ここ数か月、一部の先生を除いてまったく教員と会話ができない状態だった。ていうか今もそういう状態です。
特に今は研究室にも入れない・・・(笑)
という訳で部活会議が今までできず、誰にメンターをやって頂くのかが決まっていないのです。
急きょ明後日会議することになりそうですが、ここで決まらなかったら高専からの出場はなしになりますね。
さてと、どうしたものやら・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
そろそろ、本格的に回路の話をしていこうかなと考えています。
まずは基本的な、「アナログ」と「デジタル」についてです。
アナログ、デジタル、このブログでももう何度も登場している単語ですね。
何度も登場しているので、これが結構常識的な話であることはわかって頂けると思います。
それで、2つの意味ですが
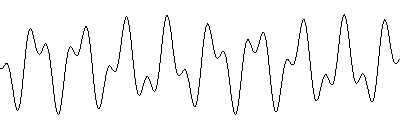
アナログはこれ
デジタルはこれ
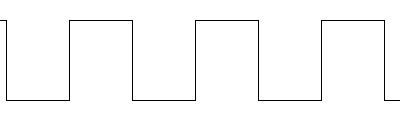
になります。
つまり、アナログは曲線。デジタルは直線。ということになります。
まぁこれだけじゃなんのことかわかりませんよね。
まず、アナログというのは、大きさ、とか強さ、とか、量のあるものです。
たとえば、速度とか、重さとか、色の濃さとか、
これらは全て厳密には、他のものと比べることができません。
車の速度とかでも、2台の車があって、違う速度で走っていたら、
どちらがどれだけ速いか。なんてみただけじゃわかりませんよね。
速度メーターがあって、それに単位があって。初めてどっちがどれだけ速いかがわかるのです。
でもメーターの目盛りは、全ての数字に対して存在してはいませんよね。
例えばメータ-の60㎞と80㎞のメモリがあったらその間のメモリはせいぜい9個ぐらいしかないでしょう。
60と80の間は整数だけでも19個あるのに、足りませんよね。
つまり、車のメーターでは、正確な車の速度はわかりません。
つまり、正確な2台の速度の比較なんてできるはずがありませんよね。
でも人間って比較することが大好きなんです。なんとか2台の車の速度を比較しようと考えました。
その結果、ある概念が生み出されました。
それが有効数字、四捨五入という概念と
デジタルという概念です。
つまりデジタルというのは、アナログの値を比較するためのもの。なのです。
そしてその比較するときに使う数字をデジタル値といいます。
この場合、車のメーターの目盛りで比較する訳ですから、
デジタル値というのは車のメーターにある値のみを指します。
そして値の比較は、アナログ値を一番近いデジタル値に置き換えて行います。
つまり速度をメーターで見て、それで針の一番近くにあるメモリを読んで、
その値を車の速度として比較に使うわけですね。
要するに元の値がアナログで、その値を他と比較するときにはデジタルにする。と覚えておいてください。
因みに有効数字と四捨五入というのはアナログ値をデジタル値にするときに使う概念です。
引っ張っておいてなんですが、ここでは触れないので、深く知りたい際にはWeb検索を利用してください。
つまり比較に使われるのは全てデジタル。つまりこの世の物事は殆どデジタルで考えられているのです。
これはパソコンも同じ。特にパソコンは先ほどのメーターでいう目盛りが、0と1の2つしかありません。
これを2値デジタルといいます。
逆に速度計の目盛りとか、温度計の目盛りとか、メモリがたくさんあるものを多値デジタルといいます。
人間は基本的にこの多値デジタルで比較を行っていますね。
2値なんて使うのはPC等の電子の世界だけです。
まぁロボットはもちろん2値なわけだけど。
つまりロボットやろうと思ったらこの2値デジタルの勉強もしなくてはならないわけですね。
というわけで今日はこの辺で。
今日いいたかったことは
「0か1の二つなのがデジタルじゃない、目盛りそのものがデジタルだ」
ということです。
つまりライトセンサーはアナログセンサーだけど、
ロボットが処理するライトセンサーの値はデジタルだということ。です。
LEGOでロボットやってる人にありがちな勘違いですね。
それではー
(^・ω・)ノRadiumProduction in RoboCupJunior
まずは基本的な、「アナログ」と「デジタル」についてです。
アナログ、デジタル、このブログでももう何度も登場している単語ですね。
何度も登場しているので、これが結構常識的な話であることはわかって頂けると思います。
それで、2つの意味ですが
アナログはこれ
デジタルはこれ
になります。
つまり、アナログは曲線。デジタルは直線。ということになります。
まぁこれだけじゃなんのことかわかりませんよね。
まず、アナログというのは、大きさ、とか強さ、とか、量のあるものです。
たとえば、速度とか、重さとか、色の濃さとか、
これらは全て厳密には、他のものと比べることができません。
車の速度とかでも、2台の車があって、違う速度で走っていたら、
どちらがどれだけ速いか。なんてみただけじゃわかりませんよね。
速度メーターがあって、それに単位があって。初めてどっちがどれだけ速いかがわかるのです。
でもメーターの目盛りは、全ての数字に対して存在してはいませんよね。
例えばメータ-の60㎞と80㎞のメモリがあったらその間のメモリはせいぜい9個ぐらいしかないでしょう。
60と80の間は整数だけでも19個あるのに、足りませんよね。
つまり、車のメーターでは、正確な車の速度はわかりません。
つまり、正確な2台の速度の比較なんてできるはずがありませんよね。
でも人間って比較することが大好きなんです。なんとか2台の車の速度を比較しようと考えました。
その結果、ある概念が生み出されました。
それが有効数字、四捨五入という概念と
デジタルという概念です。
つまりデジタルというのは、アナログの値を比較するためのもの。なのです。
そしてその比較するときに使う数字をデジタル値といいます。
この場合、車のメーターの目盛りで比較する訳ですから、
デジタル値というのは車のメーターにある値のみを指します。
そして値の比較は、アナログ値を一番近いデジタル値に置き換えて行います。
つまり速度をメーターで見て、それで針の一番近くにあるメモリを読んで、
その値を車の速度として比較に使うわけですね。
要するに元の値がアナログで、その値を他と比較するときにはデジタルにする。と覚えておいてください。
因みに有効数字と四捨五入というのはアナログ値をデジタル値にするときに使う概念です。
引っ張っておいてなんですが、ここでは触れないので、深く知りたい際にはWeb検索を利用してください。
つまり比較に使われるのは全てデジタル。つまりこの世の物事は殆どデジタルで考えられているのです。
これはパソコンも同じ。特にパソコンは先ほどのメーターでいう目盛りが、0と1の2つしかありません。
これを2値デジタルといいます。
逆に速度計の目盛りとか、温度計の目盛りとか、メモリがたくさんあるものを多値デジタルといいます。
人間は基本的にこの多値デジタルで比較を行っていますね。
2値なんて使うのはPC等の電子の世界だけです。
まぁロボットはもちろん2値なわけだけど。
つまりロボットやろうと思ったらこの2値デジタルの勉強もしなくてはならないわけですね。
というわけで今日はこの辺で。
今日いいたかったことは
「0か1の二つなのがデジタルじゃない、目盛りそのものがデジタルだ」
ということです。
つまりライトセンサーはアナログセンサーだけど、
ロボットが処理するライトセンサーの値はデジタルだということ。です。
LEGOでロボットやってる人にありがちな勘違いですね。
それではー
(^・ω・)ノRadiumProduction in RoboCupJunior
NXTのパックには標準で4種類のセンサーが搭載されています。
タッチセンサー、ライトセンサー、音センサー、超音波センサー
この4種類です。
今日はその中のタッチセンサーの話をいたしましょう。
NXTのセンサーって、みんな同じような形してますよね。
白くて灰色い四角いやつ・・・
このタッチセンサーも、そんな形をしているセンサーです。

こんな感じセンサーです。NXTに合わせているのか、ポッチはなく、3ポッチ分の穴が開いています。
つまりコネクタを使って取り付ける必要があります。コネクタって外れにくくはなるのですが、
撓りやすくなるので逆にしっかり止まらなくて不便ですよね。ちょっと難しいです。
特にギアボックスとかは絶対NXTパーツで作らない方がいいですよね。
どんな結合すりゃモーターのパワーに耐えられる強度つくんだか。
ちょっと逸れましたが、これがタッチセンサーです。オレンジの部分がセンサー側に押されることで
センサーが何かに触れていることを検知します。
といっても(こんなにでかいくせに)PS2のコントローラーみたいに圧力検知ができる訳ではないので
触れているか、触れていないかのどちらかしか知ることはできません。
圧力センサーはそのうちMindStorm社が発売とかするでしょう。作る方が安いだろうけど。
また、本体内部のバネが強い為、軽いものだと、触れただけでは検知しないかも、
センサー側が動いて、検知したいものが固定されていない場合はうまく検知しないかもしれませんね。
タッチセンサーの内部構造としては、単純にするとこんなかんじ。
今更ながらセンサー側のとこ色かえときゃよかったかな?
黄色が電流の流れ、下の黒いのが導線で、
赤の矢印と一緒に上下してるのがセンサーのオレンジの部分と考えてください。
こんな感じに、押されると、繋がって電気が流れるよ。ということです。
それだけです。簡単ですね。
先程でてきたバネというのは、この時押されたオレンジを離された時に元の場所に戻す為のバネになります。
NXTのセンサーはI2Cによる通信を行なっているものが殆どですが、これは普通のデジタルセンサーです。
RCXの変換ケーブルで重ね付けもできるみたいですよ。
これでタッチセンサーの紹介は終わりです。
ライトセンサーは前にやったから今度は何のセンサーを紹介しようかな。
まぁ今度考えときます。それではノ
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCup Junior
タッチセンサー、ライトセンサー、音センサー、超音波センサー
この4種類です。
今日はその中のタッチセンサーの話をいたしましょう。
NXTのセンサーって、みんな同じような形してますよね。
白くて灰色い四角いやつ・・・
このタッチセンサーも、そんな形をしているセンサーです。
こんな感じセンサーです。NXTに合わせているのか、ポッチはなく、3ポッチ分の穴が開いています。
つまりコネクタを使って取り付ける必要があります。コネクタって外れにくくはなるのですが、
撓りやすくなるので逆にしっかり止まらなくて不便ですよね。ちょっと難しいです。
特にギアボックスとかは絶対NXTパーツで作らない方がいいですよね。
どんな結合すりゃモーターのパワーに耐えられる強度つくんだか。
ちょっと逸れましたが、これがタッチセンサーです。オレンジの部分がセンサー側に押されることで
センサーが何かに触れていることを検知します。
といっても(こんなにでかいくせに)PS2のコントローラーみたいに圧力検知ができる訳ではないので
触れているか、触れていないかのどちらかしか知ることはできません。
圧力センサーはそのうちMindStorm社が発売とかするでしょう。作る方が安いだろうけど。
また、本体内部のバネが強い為、軽いものだと、触れただけでは検知しないかも、
センサー側が動いて、検知したいものが固定されていない場合はうまく検知しないかもしれませんね。
タッチセンサーの内部構造としては、単純にするとこんなかんじ。
今更ながらセンサー側のとこ色かえときゃよかったかな?
黄色が電流の流れ、下の黒いのが導線で、
赤の矢印と一緒に上下してるのがセンサーのオレンジの部分と考えてください。
こんな感じに、押されると、繋がって電気が流れるよ。ということです。
それだけです。簡単ですね。
先程でてきたバネというのは、この時押されたオレンジを離された時に元の場所に戻す為のバネになります。
NXTのセンサーはI2Cによる通信を行なっているものが殆どですが、これは普通のデジタルセンサーです。
RCXの変換ケーブルで重ね付けもできるみたいですよ。
これでタッチセンサーの紹介は終わりです。
ライトセンサーは前にやったから今度は何のセンサーを紹介しようかな。
まぁ今度考えときます。それではノ
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCup Junior
とりあえず恐らく最後になるであろうサマーチャレンジのロボットの紹介です。
今回は今までのサマーチャレンジと違って、城塞の隠し部屋の中にあるもの。
それは缶でした。

今回はそれを掴んで持ってくるというシナリオでしたね。
そして、これが去年2010年度のサマーチャレンジに出場したロボットの写真です。

まさかの携帯撮りしか残ってない不思議。
いかにサマーチャレンジに対してのやる気がないかがわかりますね。
基本的にサマーチャレンジのロボットは適当なんです。
でも、この時のロボットは今まででは一番まともでだったんですよ。特にライトセンサーが。
缶をつかむ機構もしっかりできてました。
初サマーチャレンジでまともなロボットが?と思ったら、
缶の掴む機構とロボットがくっつかない・・・orz
結果が上の写真です。
残念ですねー。よく転んでましたよ(笑)
っていうか挙句缶のある隠し部屋が狭すぎて、缶の掴む機構が使えないっていう・・・
どうしてこうなった。一番何もできなかったロボットですね。
っていうか本当は超音波センサーと方位センサーを使ってみたかっただけなんですが。
とてもまともにゃ動きませんでしたね。まだまだNXT使いが甘かったころです。
因みにこのロボットは今も黒歴史として部室に封印されています。
解体する気すら起こらないようなロボットだったので・・・
でも部品取りにされて段々形がなくなってきています。
今回もヘタレ機作っちゃったなー。
でも上からガシャンとやる、あの缶の機構は新しかったと信じています←
では今日はこの辺でノ
①
②
③
(^・ω・)ノRadiumProduction in RoboCupJunior
今回は今までのサマーチャレンジと違って、城塞の隠し部屋の中にあるもの。
それは缶でした。
今回はそれを掴んで持ってくるというシナリオでしたね。
そして、これが去年2010年度のサマーチャレンジに出場したロボットの写真です。
まさかの携帯撮りしか残ってない不思議。
いかにサマーチャレンジに対してのやる気がないかがわかりますね。
基本的にサマーチャレンジのロボットは適当なんです。
でも、この時のロボットは今まででは一番まともでだったんですよ。特にライトセンサーが。
缶をつかむ機構もしっかりできてました。
初サマーチャレンジでまともなロボットが?と思ったら、
缶の掴む機構とロボットがくっつかない・・・orz
結果が上の写真です。
残念ですねー。よく転んでましたよ(笑)
っていうか挙句缶のある隠し部屋が狭すぎて、缶の掴む機構が使えないっていう・・・
どうしてこうなった。一番何もできなかったロボットですね。
っていうか本当は超音波センサーと方位センサーを使ってみたかっただけなんですが。
とてもまともにゃ動きませんでしたね。まだまだNXT使いが甘かったころです。
因みにこのロボットは今も黒歴史として部室に封印されています。
解体する気すら起こらないようなロボットだったので・・・
でも部品取りにされて段々形がなくなってきています。
今回もヘタレ機作っちゃったなー。
でも上からガシャンとやる、あの缶の機構は新しかったと信じています←
では今日はこの辺でノ
①
②
③
(^・ω・)ノRadiumProduction in RoboCupJunior
曲名じゃありませんよ。
某株式会社とも関係がありません。
ロボカップの話です。
2007年から、2階にラインが消えました。
2008年から、坂のラインも消える可能性が浮上しました。
ラインのない部屋、レッドゾーンの登場です。
当初、日本では「ラインのない部屋」をレッドゾーンと認知していましたね。
でもどうやらレッドゾーンのというのは、2階の部屋のみを指すようです。
つまり坂はラインがあろうとなかろうとレッドゾーンではない。ということになりますね。
2007年度の時はゴールにのみラインがあるという意味の分からないルールでしたが。
まぁ日本だとブロック以上ではまず坂にラインはないようですけど。ノードでも関東地区は普通ありませんね。
逆に世界大会だと坂にもラインがあったりするんだとか。2009年とかいい例ですね。
ちなみに坂の基準は今は「傾斜がつくところから」ということになっていますね。
これも坂もラインがなくなるかも、となった2008年の時は大変だったんですよね。
ルールに「ラインは坂の下で終わるかもしれない」とあったのですが、
坂の下ってどこ!?
という議論が勃発。
傾斜がつくところなのか、それとも、1階の最後の部屋のゲートをくぐった所なのか、
つまり坂の定義が傾斜のある部屋全体を指すのか、傾斜のある部分だけを指すのか、という話ですね。
まぁ結局今になって思えば、それ以前の競技で、坂のクリアで加点される段階が
「ロボットが地面についている部分全てが傾斜を上り切ったとき」だったので
そこから考えれば坂の基準はフツーにわかったんですけど。
まぁ昔は子供だったということで(笑)
今年の大会はノードから2階での勝負になってくると思うんですよね。
むしろブロックからはタイム勝負?なんて気もしてます。
セカンダリはともかく、プライマリは熾烈な争いが繰り広げられるんだろうなぁ。
来週が千葉ノード
その次が茨城ノード
そしてその2週間後、つまり今から一か月後には、東東京ノード、神奈川西東京ノードが開かれますね。
そろそろ勝負をかける時期が来ているようですね。
皆さん最後まで気を抜かないように頑張ってください!
え?僕?今年はのんびりイスタンブールの観光でもできたらいいなぁと(殴
そういえばレッドゾーンといえば、2011ルールでは缶の配置がややっこしくなってますよね。
普通にランダムじゃだめなのかな?
(^・ω・)ノRadiumProduction in RoboCupJunior
某株式会社とも関係がありません。
ロボカップの話です。
2007年から、2階にラインが消えました。
2008年から、坂のラインも消える可能性が浮上しました。
ラインのない部屋、レッドゾーンの登場です。
当初、日本では「ラインのない部屋」をレッドゾーンと認知していましたね。
でもどうやらレッドゾーンのというのは、2階の部屋のみを指すようです。
つまり坂はラインがあろうとなかろうとレッドゾーンではない。ということになりますね。
2007年度の時はゴールにのみラインがあるという意味の分からないルールでしたが。
まぁ日本だとブロック以上ではまず坂にラインはないようですけど。ノードでも関東地区は普通ありませんね。
逆に世界大会だと坂にもラインがあったりするんだとか。2009年とかいい例ですね。
ちなみに坂の基準は今は「傾斜がつくところから」ということになっていますね。
これも坂もラインがなくなるかも、となった2008年の時は大変だったんですよね。
ルールに「ラインは坂の下で終わるかもしれない」とあったのですが、
坂の下ってどこ!?
という議論が勃発。
傾斜がつくところなのか、それとも、1階の最後の部屋のゲートをくぐった所なのか、
つまり坂の定義が傾斜のある部屋全体を指すのか、傾斜のある部分だけを指すのか、という話ですね。
まぁ結局今になって思えば、それ以前の競技で、坂のクリアで加点される段階が
「ロボットが地面についている部分全てが傾斜を上り切ったとき」だったので
そこから考えれば坂の基準はフツーにわかったんですけど。
まぁ昔は子供だったということで(笑)
今年の大会はノードから2階での勝負になってくると思うんですよね。
むしろブロックからはタイム勝負?なんて気もしてます。
セカンダリはともかく、プライマリは熾烈な争いが繰り広げられるんだろうなぁ。
来週が千葉ノード
その次が茨城ノード
そしてその2週間後、つまり今から一か月後には、東東京ノード、神奈川西東京ノードが開かれますね。
そろそろ勝負をかける時期が来ているようですね。
皆さん最後まで気を抜かないように頑張ってください!
え?僕?今年はのんびりイスタンブールの観光でもできたらいいなぁと(殴
そういえばレッドゾーンといえば、2011ルールでは缶の配置がややっこしくなってますよね。
普通にランダムじゃだめなのかな?
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
(01/01)
(05/07)
(01/11)
プロフィール
HN:
Luz
性別:
男性
アーカイブ