RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
再び、アクセス解析のお時間です。
8月の主なアクセスについて、ちょっと早いけど検証してみましょう。
とりあえずフレーズで多かったのが、
16F1936
大半の人が「なにこれ?」と思うでしょうね。
これはPICの型番。それもかなり新しいPICの型番です。
まずこれの関連の記事はこの記事、同一シリーズ16F1938を秋月電子で見つけたというものに始まり、
この記事で16F193Xシリーズをしっかり紹介っしたぽいなにかをしました。
PGDとPGCの名前が変わってるーっていうハナシでしたよね。データーシートに載っているという話もしました。
そしてあとはこのドットマトリクス(制作途中)で使っているという話もしました。
やっぱりそういった関係でしょうね。
特にまだ新しくて、日本語の説明が書かれたサイトが少ないもの大きな要因でしょうね。
後、検索フレーズで多いのが産技祭2011。
確かに出るっていいましたけど・・・どうしてこうなった(笑)
他にも最新PIC関連のフレーズや、未だにコンデンサ関連のフレーズが圧倒的に多いです。
抵抗やダイオード、トランジスタはほぼ皆無ですね・・・
後は
「都立産業技術高専期末テスト赤点」とか「高専生は使えない」なんてのもありました。
因みに「床に電流を流す」でググると、哲学的なサイトがでてきたりしました(笑)
床に電流系のトラップは同心円状やストライプ、とぐろ形式に配置した
2つの外部と絶縁された導体板にいい感じの電位差をかければいいんじゃないかな。
まぁ電圧謝ると危険なのでよい子はマネしないように(笑)
それでは。
(^・ω・)ノ RadiumProduction in RoboCup Junior
8月の主なアクセスについて、ちょっと早いけど検証してみましょう。
とりあえずフレーズで多かったのが、
16F1936
大半の人が「なにこれ?」と思うでしょうね。
これはPICの型番。それもかなり新しいPICの型番です。
まずこれの関連の記事はこの記事、同一シリーズ16F1938を秋月電子で見つけたというものに始まり、
この記事で16F193Xシリーズをしっかり紹介っしたぽいなにかをしました。
PGDとPGCの名前が変わってるーっていうハナシでしたよね。データーシートに載っているという話もしました。
そしてあとはこのドットマトリクス(制作途中)で使っているという話もしました。
やっぱりそういった関係でしょうね。
特にまだ新しくて、日本語の説明が書かれたサイトが少ないもの大きな要因でしょうね。
後、検索フレーズで多いのが産技祭2011。
確かに出るっていいましたけど・・・どうしてこうなった(笑)
他にも最新PIC関連のフレーズや、未だにコンデンサ関連のフレーズが圧倒的に多いです。
抵抗やダイオード、トランジスタはほぼ皆無ですね・・・
後は
「都立産業技術高専期末テスト赤点」とか「高専生は使えない」なんてのもありました。
後、「床に電流を流す方法」なんてフレーズもありました。怖いってば(笑)何故かかったし
とりあえず今回はそんな感じでした。因みに「床に電流を流す」でググると、哲学的なサイトがでてきたりしました(笑)
床に電流系のトラップは同心円状やストライプ、とぐろ形式に配置した
2つの外部と絶縁された導体板にいい感じの電位差をかければいいんじゃないかな。
まぁ電圧謝ると危険なのでよい子はマネしないように(笑)
それでは。
(^・ω・)ノ RadiumProduction in RoboCup Junior
最初に部連絡ですが、8月の31日にダンスのプレゼンのついでにサマーチャレンジの反省会を行うことになりました。
サマーチャレンジの結果に応じて面白いことになるので期待しておいてください。
また、入賞できなかった子には反省文を書いて貰うことになったので頑張ってやってくださいということです。
あと例のプレゼンシートの電子媒体は此方にメールで提出お願いします。
toaru_sangi_no_rcj@yahoo.co.jp
さてと、今日の部活ですが、今日も僕は午前中はいん秋葉原でした。
そろそろ一年生の中で「遅刻安定の人」というレッテルが張られそうで怖いです。
行くと、もう午後になっていました。副部長朝からのお勤めお疲れ様です。
まず、持ってきた棚の設置、置き場がなくて困ったけど・・・
そして次は・・・
次は・・・
しばしのゆるゆり!タイム。どうしてこうなった。
そしてその後、ちょっとだけロボットを改良しました。
なんかあまりに部室に人が多くて、部活する気が↓してしまったのですね(笑)
今日は何をしたかというと、先週の段階で、作った串除けがバンプでバキバキバキッ!っと悲鳴を上げていたので
既存のものを解雇にして、新しい材料で作り変えていました。ずいぶんゆるゆりな出来になったけどなぁ・・・
それで、それをバンプでテストしようと思ったのですが、知らないうちに副部長がまたロボットを作り直していて、
部屋のコースをテストで走らせていました。
と、いう訳で、その流れに乗って走らせてみました。
ライントレースのテストは一回もしていなかったのですが、思いのほかうまくいった。という感じでしょうか。
プログラム一部ミスってて、ギャップで明後日の方向に進軍していましたけど・・・(苦笑)
とりあえずそれを修正して・・・気が付いたらいつの間にか部活終了のお時間になっていました。
あれ?バンプテストしてない・・・?
やることいっぱいだったはずなのに、何もできなかった今日この頃でした。
副部長はやくバンパーつけろよー。
(^・ω・)ノ RadiumProduction in RoboCup Junior
サマーチャレンジの結果に応じて面白いことになるので期待しておいてください。
また、入賞できなかった子には反省文を書いて貰うことになったので頑張ってやってくださいということです。
あと例のプレゼンシートの電子媒体は此方にメールで提出お願いします。
toaru_sangi_no_rcj@yahoo.co.jp
さてと、今日の部活ですが、今日も僕は午前中はいん秋葉原でした。
そろそろ一年生の中で「遅刻安定の人」というレッテルが張られそうで怖いです。
行くと、もう午後になっていました。副部長朝からのお勤めお疲れ様です。
まず、持ってきた棚の設置、置き場がなくて困ったけど・・・
そして次は・・・
次は・・・
しばしのゆるゆり!タイム。どうしてこうなった。
そしてその後、ちょっとだけロボットを改良しました。
なんかあまりに部室に人が多くて、部活する気が↓してしまったのですね(笑)
今日は何をしたかというと、先週の段階で、作った串除けがバンプでバキバキバキッ!っと悲鳴を上げていたので
既存のものを解雇にして、新しい材料で作り変えていました。ずいぶんゆるゆりな出来になったけどなぁ・・・
それで、それをバンプでテストしようと思ったのですが、知らないうちに副部長がまたロボットを作り直していて、
部屋のコースをテストで走らせていました。
と、いう訳で、その流れに乗って走らせてみました。
ライントレースのテストは一回もしていなかったのですが、思いのほかうまくいった。という感じでしょうか。
プログラム一部ミスってて、ギャップで明後日の方向に進軍していましたけど・・・(苦笑)
とりあえずそれを修正して・・・気が付いたらいつの間にか部活終了のお時間になっていました。
あれ?バンプテストしてない・・・?
やることいっぱいだったはずなのに、何もできなかった今日この頃でした。
副部長はやくバンパーつけろよー。
(^・ω・)ノ RadiumProduction in RoboCup Junior
前回はトランジスタのスイッチング作用についての紹介をしたかと思います。
今回は前回予告の通り、トランジスタの主な作用、増幅作用についての紹介をしようと思います。
増幅って大体意味はわかりますよね。なんか増えるよー。みたいな感じです。
具体的にいうと、トランジスタのC-E間に流れる電流は、B-E間に流れる電流に(大体)比例しています。
つまり、B-E間に流れる電流が増えると、C-E間に流れる電流も増えます。
これをトランジスタの増幅作用と言います。厳密には増幅でもなんでもないんですよね。なんも増えてないし(笑)
ただ、このふたつが比例している、それだけです。
比例をしていると言うことは、必ず比例定数が存在していますよね。AはBの何倍か。と云うアレです。
その何倍かの数値が比例定数ですよね。これは定数だからとりあえず、一定の値になります。
トランジスタの電流におけるこの比例定数のことを「増幅率」といいます。
エミッタ接地の場合、αで書かれることが殆どですね。
この増幅率は、同じトランジスタでも、回路の組み方によって変わります。
エミッタ接地が、ベース接地やコレクタ接地に比べてよく使われる理由がこれです。
要するにエミッタ接地にすると、この増幅率が大きくなるのですね。なので沢山の電流を操作できる・・と。
そういうわけで一般にはエミッタ接地回路が使われているのです。
大体50~200ぐらいが一般的でしょうか。これはトランジスタの型番によって変わってきます。
例えば、αが100で、B-E間に1mAの電流が流れたとすると、C-E間にはその100倍の100mAが流れる・・・
と言った具合になります。
実際は完全に比例しているわけではないので、若干ずれてきますけど・・・
まぁ増幅作用についてのおおまかな説明はこんな感じです。
このようにトランジスタはデジタル的にはスイッチング作用、アナログ的には増幅作用という2つの作用を持っています。
このふたつはどちらも非常に電子回路では重要で、ちょっと昔のICはほぼ全部これで造れられていたので、
これなしではなにもできませんでした。
それほで重要で、使用頻度も高いので、この素子はちゃんと使えるようになっとかないと
電子回路いじるのは大変じゃないかなぁ。
それとなーく、部員に視線を向ける感じに書いてます。
まぁトランジスタにつのる話はまだまだあるような気がしますが、どうにもきりが無いのでこの辺で。
最後にトランジスタの種類についての話をして、トランジスタのことは終了にしたいと思います。
でも、今日の記事は取り合えずこの辺で、
それでは又、次回に続くー。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今回は前回予告の通り、トランジスタの主な作用、増幅作用についての紹介をしようと思います。
増幅って大体意味はわかりますよね。なんか増えるよー。みたいな感じです。
具体的にいうと、トランジスタのC-E間に流れる電流は、B-E間に流れる電流に(大体)比例しています。
つまり、B-E間に流れる電流が増えると、C-E間に流れる電流も増えます。
これをトランジスタの増幅作用と言います。厳密には増幅でもなんでもないんですよね。なんも増えてないし(笑)
ただ、このふたつが比例している、それだけです。
比例をしていると言うことは、必ず比例定数が存在していますよね。AはBの何倍か。と云うアレです。
その何倍かの数値が比例定数ですよね。これは定数だからとりあえず、一定の値になります。
トランジスタの電流におけるこの比例定数のことを「増幅率」といいます。
エミッタ接地の場合、αで書かれることが殆どですね。
この増幅率は、同じトランジスタでも、回路の組み方によって変わります。
エミッタ接地が、ベース接地やコレクタ接地に比べてよく使われる理由がこれです。
要するにエミッタ接地にすると、この増幅率が大きくなるのですね。なので沢山の電流を操作できる・・と。
そういうわけで一般にはエミッタ接地回路が使われているのです。
大体50~200ぐらいが一般的でしょうか。これはトランジスタの型番によって変わってきます。
例えば、αが100で、B-E間に1mAの電流が流れたとすると、C-E間にはその100倍の100mAが流れる・・・
と言った具合になります。
実際は完全に比例しているわけではないので、若干ずれてきますけど・・・
まぁ増幅作用についてのおおまかな説明はこんな感じです。
このようにトランジスタはデジタル的にはスイッチング作用、アナログ的には増幅作用という2つの作用を持っています。
このふたつはどちらも非常に電子回路では重要で、ちょっと昔のICはほぼ全部これで造れられていたので、
これなしではなにもできませんでした。
それほで重要で、使用頻度も高いので、この素子はちゃんと使えるようになっとかないと
電子回路いじるのは大変じゃないかなぁ。
それとなーく、部員に視線を向ける感じに書いてます。
まぁトランジスタにつのる話はまだまだあるような気がしますが、どうにもきりが無いのでこの辺で。
最後にトランジスタの種類についての話をして、トランジスタのことは終了にしたいと思います。
でも、今日の記事は取り合えずこの辺で、
それでは又、次回に続くー。
(^・ω・)ノ RadiumProduction in RoboCup Junior
最後に残ったC言語の主な条件文がこのswitch文です。
ちょっと前に紹介したif文の派生系みたいなものでしょうか。
基本的なswitch文のプログラムはこんな感じになります。
#include <stdio.h>
int main(void)
{
int x;
printf("数字を入力してください。");
scanf("%d",&x);
switch(x){
case 1:
printf("入力された数字は1です。/n");
break;
case 2:
printf("入力された数字は2です。/n");
break;
case 3:
printf("入力された数字は3です。/n");
break;
default:
printf("1、2、3以外の数が入力されました。/n");
}
return 0;
}
数字を入力し、それが1か2か3だったら「入力された数字は~です。」と出力し、
それ以外の数字なら、「1、2、3以外の数が入力されました。」と出力するプログラムです。
switch文はこのようにcaseというものとセットで使います。
switchのカッコ内に入れた値とcaseと:の間に入れた値が等しければ、
それ以下のプログラムを実行するようになっています。
なのでxの値が1ならcase1以下の文を、2ならcase2以下の文を、3ならcase3以下の文を、それぞれ実行します。
xの値がcaseのどれにも該当しない場合はdefault以下の文を実行することになります。
このdefaultは省略することもできます。
そして最後にbreak;をつける。これがswitch文の定型となります。(defaultには無くても良い)
このbreak;という文ですが、これはbreak文といって、これもひとつの構文になっています。
これはどういう命令かというと、「一番中側の中括弧から抜ける」命令です。
例えばさっきのswitch文ですが、
あのプログラムでは例えば、case1のときの処理とcase2の間にbreakがありました。
あのプログラムだと、case1の処理が終わったら、breakを使って、switch文の中括弧から抜け出ているのです。
もしあそこでbreakをいれなかったら、xの値が1だったときに
case1の処理を行った後でcase2の処理を行ってしまうことになります。
もっと単純な例を出すと、whileでの無限ループの例、
int x=0;
while(1){
if(x==100)
break;
x++;
}
このようなプログラムがどこかにあったとします。
これはwhile文で無限ループをしていますが、xが100になると、if文に入って、breakします。
つまり、このwhileループを抜けでるのです。
このようにbreakはswitch文以外でも、様々な条件文で使用することができます。
「一番中側」という定義があるのは、
こういった場合は、永遠にループから出られないということです。
int x=0;
while(1)
{
while(1)
{
if(x==100)
break;
x++;
}
}
中側のループはbreakで出られますが、直ぐ外側のループによってまた戻ってしまいますからね。
このような文がbreak文です。似たようなもので、continue文というものがあります。
これはbreakと逆で、ループの一番最初に戻ると言う構文です。
なのでプログラム内で、これがあれば、一番中側の中括弧の部分の一番最初に戻ると言うわけです、
つまりこれも無限ループです。
#include <stdio.h>
int main(void)
{
int x;
printf("数字を入力してください。");
scanf("%d",&x);
switch(x){
case 1:
printf("入力された数字は1です。/n");
continue;
case 2:
printf("入力された数字は2です。/n");
continue;
case 3:
printf("入力された数字は3です。/n");
continue;
default:
printf("1、2、3以外の数が入力されました。/n");
}
return 0;
}
最初に1,2,3以外の数字を入力しないと、無限にループします。
コンパイラによってはこれだとエラーがでるかもしれませんけど・・・
こっちはbreakと違って、結構使いどころが限られそうな構文ですね。
とりあえず今日はswitch文とbreak文とcontinue文についての紹介でした。
次は・・・フリプロセッサかなぁ。まぁなにかしら紹介すると思います。
それでは今日はこの辺で・・・
(^・ω・)ノ RadiumProduction in RoboCup Junior
ちょっと前に紹介したif文の派生系みたいなものでしょうか。
基本的なswitch文のプログラムはこんな感じになります。
#include <stdio.h>
int main(void)
{
int x;
printf("数字を入力してください。");
scanf("%d",&x);
switch(x){
case 1:
printf("入力された数字は1です。/n");
break;
case 2:
printf("入力された数字は2です。/n");
break;
case 3:
printf("入力された数字は3です。/n");
break;
default:
printf("1、2、3以外の数が入力されました。/n");
}
return 0;
}
数字を入力し、それが1か2か3だったら「入力された数字は~です。」と出力し、
それ以外の数字なら、「1、2、3以外の数が入力されました。」と出力するプログラムです。
switch文はこのようにcaseというものとセットで使います。
switchのカッコ内に入れた値とcaseと:の間に入れた値が等しければ、
それ以下のプログラムを実行するようになっています。
なのでxの値が1ならcase1以下の文を、2ならcase2以下の文を、3ならcase3以下の文を、それぞれ実行します。
xの値がcaseのどれにも該当しない場合はdefault以下の文を実行することになります。
このdefaultは省略することもできます。
そして最後にbreak;をつける。これがswitch文の定型となります。(defaultには無くても良い)
このbreak;という文ですが、これはbreak文といって、これもひとつの構文になっています。
これはどういう命令かというと、「一番中側の中括弧から抜ける」命令です。
例えばさっきのswitch文ですが、
あのプログラムでは例えば、case1のときの処理とcase2の間にbreakがありました。
あのプログラムだと、case1の処理が終わったら、breakを使って、switch文の中括弧から抜け出ているのです。
もしあそこでbreakをいれなかったら、xの値が1だったときに
case1の処理を行った後でcase2の処理を行ってしまうことになります。
もっと単純な例を出すと、whileでの無限ループの例、
int x=0;
while(1){
if(x==100)
break;
x++;
}
このようなプログラムがどこかにあったとします。
これはwhile文で無限ループをしていますが、xが100になると、if文に入って、breakします。
つまり、このwhileループを抜けでるのです。
このようにbreakはswitch文以外でも、様々な条件文で使用することができます。
「一番中側」という定義があるのは、
こういった場合は、永遠にループから出られないということです。
int x=0;
while(1)
{
while(1)
{
if(x==100)
break;
x++;
}
}
中側のループはbreakで出られますが、直ぐ外側のループによってまた戻ってしまいますからね。
このような文がbreak文です。似たようなもので、continue文というものがあります。
これはbreakと逆で、ループの一番最初に戻ると言う構文です。
なのでプログラム内で、これがあれば、一番中側の中括弧の部分の一番最初に戻ると言うわけです、
つまりこれも無限ループです。
#include <stdio.h>
int main(void)
{
int x;
printf("数字を入力してください。");
scanf("%d",&x);
switch(x){
case 1:
printf("入力された数字は1です。/n");
continue;
case 2:
printf("入力された数字は2です。/n");
continue;
case 3:
printf("入力された数字は3です。/n");
continue;
default:
printf("1、2、3以外の数が入力されました。/n");
}
return 0;
}
最初に1,2,3以外の数字を入力しないと、無限にループします。
コンパイラによってはこれだとエラーがでるかもしれませんけど・・・
こっちはbreakと違って、結構使いどころが限られそうな構文ですね。
とりあえず今日はswitch文とbreak文とcontinue文についての紹介でした。
次は・・・フリプロセッサかなぁ。まぁなにかしら紹介すると思います。
それでは今日はこの辺で・・・
(^・ω・)ノ RadiumProduction in RoboCup Junior
最後まで残ってたNXTを今日完全に直しました。
ちゃんとつくようになったよ!
なんとか・・ですね。秋葉行って、NXT直して・・・
って部活してねー!(笑)
とりあえず缶を避難場所に置くことができることを確認できたので、今日の活動は終了です。
それではー。
これらのNXTの話
(^・ω・)ノRadiumProduction in RoboCup Junior
ちゃんとつくようになったよ!
なんとか・・ですね。秋葉行って、NXT直して・・・
って部活してねー!(笑)
とりあえず缶を避難場所に置くことができることを確認できたので、今日の活動は終了です。
それではー。
これらのNXTの話
(^・ω・)ノRadiumProduction in RoboCup Junior
結果がこれだよ!
この袋の大きさを見ろ!(笑)
今日の主な戦利品は
ペンタブ(2900)
タブレットPC(2万9800)
半田こて台(580)
LANルーター(1480)
そしてサングラス(3900、一番の事故)です。
前半二つもかなり事故ってますが・・・やっぱり最後の事故が凄まじいですね。
まぁこのサングラスの話はまた今度するとして、とりあえず今日のアキバの話。
とりあえず、まず人が少ない。まぁこれはコミケの影響でしょうね。今日からですから・・・
そして液晶とSSD、特にメモリの暴落が酷いことになってる・・・ちょっと前にUSBの第3次暴落がおきたところなのに・・・
そしてソフマップで無線LANルーターが大変なことになっていました。
11nの高速で通常4800円の品が1480円という状態、期間限定特価だってさ・・・。
今のアキバ、どうなってんだ・・・色々ととんでもないことになっています(CPUの暴落も相変わらずだし・・・)
今日買ったものだけで考えても、同じ(ような)ものを去年買おうとしたら
おそらく倍以上かかるでしょうね・・・
まぁタブレットPCとか去年はなかった気もしますが(笑)
という訳でいろんな物の価格が暴落している秋葉から?の報告でした。
(^・ω・)ノ RadiumProduction in RoboCup Junior
この袋の大きさを見ろ!(笑)
今日の主な戦利品は
ペンタブ(2900)
タブレットPC(2万9800)
半田こて台(580)
LANルーター(1480)
そしてサングラス(3900、一番の事故)です。
前半二つもかなり事故ってますが・・・やっぱり最後の事故が凄まじいですね。
まぁこのサングラスの話はまた今度するとして、とりあえず今日のアキバの話。
とりあえず、まず人が少ない。まぁこれはコミケの影響でしょうね。今日からですから・・・
そして液晶とSSD、特にメモリの暴落が酷いことになってる・・・ちょっと前にUSBの第3次暴落がおきたところなのに・・・
そしてソフマップで無線LANルーターが大変なことになっていました。
11nの高速で通常4800円の品が1480円という状態、期間限定特価だってさ・・・。
今のアキバ、どうなってんだ・・・色々ととんでもないことになっています(CPUの暴落も相変わらずだし・・・)
今日買ったものだけで考えても、同じ(ような)ものを去年買おうとしたら
おそらく倍以上かかるでしょうね・・・
まぁタブレットPCとか去年はなかった気もしますが(笑)
という訳でいろんな物の価格が暴落している秋葉から?の報告でした。
(^・ω・)ノ RadiumProduction in RoboCup Junior
ノー勉で受けた電子回路のテスト
なんか知らない公式を書け。という問題が多数出てきたので悲惨な結果・・・になるはずだったのですが・・・
なんか適当に考えた公式の6式のうちの
全てが正答にクリーンヒット(笑)
なんと全問正解になりました。
あれ?レベル上がったかな?
事故ったはずの試験がまさかの大逆転劇。
ここで得た結論は
「わからない回答はとりあえず適当に書いてみよう」ということで・・・。
それでは今日はこの辺で(笑)
(^・ω・)ノRadiumProduction in RoboCup Junior
なんか知らない公式を書け。という問題が多数出てきたので悲惨な結果・・・になるはずだったのですが・・・
なんか適当に考えた公式の6式のうちの
全てが正答にクリーンヒット(笑)
なんと全問正解になりました。
あれ?レベル上がったかな?
事故ったはずの試験がまさかの大逆転劇。
ここで得た結論は
「わからない回答はとりあえず適当に書いてみよう」ということで・・・。
それでは今日はこの辺で(笑)
(^・ω・)ノRadiumProduction in RoboCup Junior
あと若干3ヶ月半。副部長のロボットがそこにあったはずなのに、今はもうNXTとモーターが転がっているだけ。
どういうことなの・・・(泣)
そして僕はといいますと、4月の終わりに使ったロボットがそのまま大会にでることになりそうです。
チームメイトはワンワンに出てるからね。とりあえずこっちはおあずけなんです。
という訳でロボットのメインはぼくがつくっているんですが・・結局原点帰り(笑)
因みに、今年はセンサーの数を例年より1桁少なくしてみることにしました。
加速度とか、コンパスとか、昨年と使っているセンサーはあまり変わらないのですが、
なぜか総数が半分くらいになっているような・・・
とりあえず今のところ、
ライトセンサ-3個
タッチセンサー2個
通電センサー1個
加速度センサー1個
コンパスセンサー1個
超音波センサー1個
で行こうかな・・・
とかいって結局増えるんですよね、例年のパターンだと(笑)
本当はライトセンサーは5個欲しいのですけど、ちょっと搭載する幅が足りない・・・
どうにかならないかなぁ。
(^・ω・)ノRadiumProduction in RoboCup Junior
どういうことなの・・・(泣)
そして僕はといいますと、4月の終わりに使ったロボットがそのまま大会にでることになりそうです。
チームメイトはワンワンに出てるからね。とりあえずこっちはおあずけなんです。
という訳でロボットのメインはぼくがつくっているんですが・・結局原点帰り(笑)
因みに、今年はセンサーの数を例年より1桁少なくしてみることにしました。
加速度とか、コンパスとか、昨年と使っているセンサーはあまり変わらないのですが、
なぜか総数が半分くらいになっているような・・・
とりあえず今のところ、
ライトセンサ-3個
タッチセンサー2個
通電センサー1個
加速度センサー1個
コンパスセンサー1個
超音波センサー1個
で行こうかな・・・
とかいって結局増えるんですよね、例年のパターンだと(笑)
本当はライトセンサーは5個欲しいのですけど、ちょっと搭載する幅が足りない・・・
どうにかならないかなぁ。
(^・ω・)ノRadiumProduction in RoboCup Junior
忍者ブログはどんどん改悪が進んでどんどん使いづらくなっていきますね。最悪。
とりあえず今日も「ちゃんと」部活を行いました。
一年生も真面目にロボットを作り、僕もアームを作り、
総書記様は・・・
サマーチャレンジのフィールドを作っていました。
というより作らせたんですけど’(笑)
という訳で彼によって生み出されたそのサマーチャレンジフィールドは1階の未来工房に置かれることになりました。
ちょうど模造紙2枚分くらいのサイズですかね、というより模造紙2枚そのものですけど・・・
結構人出余ってた感が否めなかったけど、一人で頑張ってくれました。お疲れ様です。
でも本番18日前にフィールド完成で調整開始って・・・おい(笑)
まぁこれでも例年よりは2週間以上活動開始が早いんですよ。
それに、いつもだったらフィールドなんて作りませんし。(というより作れる場所が・・・なかった(笑))
本番当日の調整が初調整!なんて状態だったりしているんです。
それに比べれば随分の進歩ですよね。
まぁそれでも子供たちに比べれば極端に遅いですよね。
まだプログラムどころかロボットができている人が誰もいませんから(笑)
まぁと云うわけで、今日は活動の第一歩、フィールド作りを総書記様が行ってくださいました。
でも彼・・・サマーチャレンジでないんだよね(笑)
そして同じようにサマーチャレンジに出ない副部長、彼はレスキューロボットを作っています。
今日になって、やっと今までの課題であった、ライトセンサーの取り付けが終わったらしいのです。
でも、できた!と叫ぶ彼の手の中には・・・某TAKUMI臭が否めないような物体が存在していたのです・・・。
・・・。
After,he was mad and shouting "Mirakurun! Mirakurun!" while running.
どうやら人生の壁にぶち当たったようです。強く、逞しく生きてください。
ついでに僕の進行状態ですが、とりあえずアームっぽい何かはできました。
缶がずるずるーっとなる残念な現象は解決したので悪しからず(笑)
そんな感じで今日の部活は終了です。
それとあの恒例のゆるゆりは部活動の一環で・・・は・・・ない・・・か・・・?も。
まさか2回リピートする羽目になるとは思ってなかったんだ。急展開すぎたんです。仕方ない(笑)
(^・ω・)ノRadiumProduction in RoboCup Junior
P.s 近々、NXTの修理録でも書こうかな。
とりあえず今日も「ちゃんと」部活を行いました。
一年生も真面目にロボットを作り、僕もアームを作り、
総書記様は・・・
サマーチャレンジのフィールドを作っていました。
というより作らせたんですけど’(笑)
という訳で彼によって生み出されたそのサマーチャレンジフィールドは1階の未来工房に置かれることになりました。
ちょうど模造紙2枚分くらいのサイズですかね、というより模造紙2枚そのものですけど・・・
結構人出余ってた感が否めなかったけど、一人で頑張ってくれました。お疲れ様です。
でも本番18日前にフィールド完成で調整開始って・・・おい(笑)
まぁこれでも例年よりは2週間以上活動開始が早いんですよ。
それに、いつもだったらフィールドなんて作りませんし。(というより作れる場所が・・・なかった(笑))
本番当日の調整が初調整!なんて状態だったりしているんです。
それに比べれば随分の進歩ですよね。
まぁそれでも子供たちに比べれば極端に遅いですよね。
まだプログラムどころかロボットができている人が誰もいませんから(笑)
まぁと云うわけで、今日は活動の第一歩、フィールド作りを総書記様が行ってくださいました。
でも彼・・・サマーチャレンジでないんだよね(笑)
そして同じようにサマーチャレンジに出ない副部長、彼はレスキューロボットを作っています。
今日になって、やっと今までの課題であった、ライトセンサーの取り付けが終わったらしいのです。
でも、できた!と叫ぶ彼の手の中には・・・某TAKUMI臭が否めないような物体が存在していたのです・・・。
・・・。
After,he was mad and shouting "Mirakurun! Mirakurun!" while running.
どうやら人生の壁にぶち当たったようです。強く、逞しく生きてください。
ついでに僕の進行状態ですが、とりあえずアームっぽい何かはできました。
缶がずるずるーっとなる残念な現象は解決したので悪しからず(笑)
そんな感じで今日の部活は終了です。
それとあの恒例のゆるゆりは部活動の一環で・・・は・・・ない・・・か・・・?も。
まさか2回リピートする羽目になるとは思ってなかったんだ。急展開すぎたんです。仕方ない(笑)
(^・ω・)ノRadiumProduction in RoboCup Junior
P.s 近々、NXTの修理録でも書こうかな。
とりあえず、今日は被災者を助けるアームを作っていました。
去年は色々と吹っ切れた機構を使ってしまい、ライントレースに支障・・・というより死傷がでてしまったので
今回は・・・その・・・もうちょっと小型のものを使おうかな・・という雰囲気になっています。
まぁまだアームで行くかも確定ではないのですけど・・・
とりあえずいろいろ作ってみています。
そろそろやらないと時間的にも厳しいですからね。
それはそうと・・・サマーチャレンジにでるうちの高専生・・・
未だに何もやってないんだなぁこれが(笑)
若干一名ロボットを作り始めてはいるのですが、全体的に間に合わないだろ(笑)
さて、みんなどうするつもりなのでしょう。
やっぱりテコ入れいるかなぁ・・・。
そうそう、副部長が今年はPICで出るそうです♫(本人談)
(^・ω・)ノRadiumProduction in RoboCupJunior
去年は色々と吹っ切れた機構を使ってしまい、ライントレースに支障・・・というより死傷がでてしまったので
今回は・・・その・・・もうちょっと小型のものを使おうかな・・という雰囲気になっています。
まぁまだアームで行くかも確定ではないのですけど・・・
とりあえずいろいろ作ってみています。
そろそろやらないと時間的にも厳しいですからね。
それはそうと・・・サマーチャレンジにでるうちの高専生・・・
未だに何もやってないんだなぁこれが(笑)
若干一名ロボットを作り始めてはいるのですが、全体的に間に合わないだろ(笑)
さて、みんなどうするつもりなのでしょう。
やっぱりテコ入れいるかなぁ・・・。
そうそう、副部長が今年はPICで出るそうです♫(本人談)
(^・ω・)ノRadiumProduction in RoboCupJunior
恐ろしいレベルの雨が降ってたのでやめにしました。コワイコワイ。
という訳で今日はずっと自宅ニートです。ロボット・・・作ってないなぁ
とりあえず今のうちにサマーチャレンジの競技、レスキューについての紹介をしちゃいましょう。
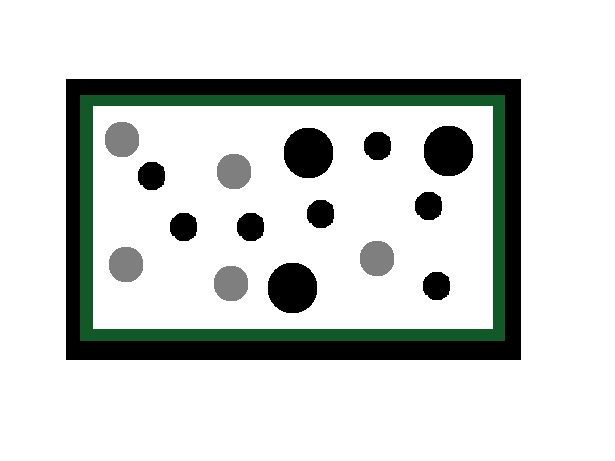
まず、競技フィールドは通常のレスキューフィールドで行います。
でも、競技の内容が全然違う・・・シンガポール世界大会の時のレスキューCに似てますね。
まぁあれよりはだいぶ楽な競技ですけど・・・
競技の流れとしては、まず2台のロボットで競技を行います。
スタートは2台とも1階の一部屋目で、時差スタートになっています。
一台目のスタートから30秒以降ならいつでもスタートができます。
只、競技時間の8分は一台目のスタートからの計測なので
二台目のスタートのタイミングには気を付けないといけませんね。
それでもう1階の二部屋目からラインがありません。
部屋の中央に缶の被災者が置かれていて、
部屋の四隅のどっか(実質2カ所しか可能性はないけど)にプライマリの避難場所があります。
また、そこからさらに坂を上った2階の部屋のどっかにも被災者がいます。
2階には、避難場所が二つあり、片方はプライマリ用の避難場所、片方はセカンダリ用の避難場所です。
これも部屋の四隅の何れかに置かれます。
全ての被災者をどこかしらの避難場所に置くことで競技は終了となります。
被災者に2対して避難場所は3、これには理由があり、置いた避難場所によって得点が変わってきてしまうのです。
簡潔に言うと
2階セカ>2階プラ>1階
となります。
つまり、一番高得点を取れるのは、2階のセカンダリの方の避難場所に缶を二つとも押し込む方法ですね。
でもそれをするとなると、被災者を持って坂を上ったり、倒さずに2つの缶をあの狭い中に押しこむ必要がありますね。
さて、こんなことができるチームは現れるのでしょうか・・・
チームは当日のくじで決定するので、いくら自分のロボットが優れていても、相手もそうでないと・・・難しいですよね。
まぁそういったパフォーマンスにも期待です。
また、1階の避難場所は被災者がとりあえず入ればいいという、2010ルールに準じていますが、
2階の避難場所は2011の厳しい方のルールに準じています。
その他のルールは2011ロボカップジュニアレスキュールールに準じているはずです。
また、競技進行停止の原点は5点となっています。
とりあえずこんな感じの派生レスキューみたいな競技となっています。
なんか本家のレスキューAより難しいような・・・
とりあえずうちの高専からは、この競技に1名参加することになりました。
彼には高専の実力とやらを見せつけてほしいですね(投げやり)
え?僕ですか?僕は・・・・
それではーさよーならー
(^・ω・)ノRadiumProduction in RoboCupJunior
という訳で今日はずっと自宅ニートです。ロボット・・・作ってないなぁ
とりあえず今のうちにサマーチャレンジの競技、レスキューについての紹介をしちゃいましょう。
まず、競技フィールドは通常のレスキューフィールドで行います。
でも、競技の内容が全然違う・・・シンガポール世界大会の時のレスキューCに似てますね。
まぁあれよりはだいぶ楽な競技ですけど・・・
競技の流れとしては、まず2台のロボットで競技を行います。
スタートは2台とも1階の一部屋目で、時差スタートになっています。
一台目のスタートから30秒以降ならいつでもスタートができます。
只、競技時間の8分は一台目のスタートからの計測なので
二台目のスタートのタイミングには気を付けないといけませんね。
それでもう1階の二部屋目からラインがありません。
部屋の中央に缶の被災者が置かれていて、
部屋の四隅のどっか(実質2カ所しか可能性はないけど)にプライマリの避難場所があります。
また、そこからさらに坂を上った2階の部屋のどっかにも被災者がいます。
2階には、避難場所が二つあり、片方はプライマリ用の避難場所、片方はセカンダリ用の避難場所です。
これも部屋の四隅の何れかに置かれます。
全ての被災者をどこかしらの避難場所に置くことで競技は終了となります。
被災者に2対して避難場所は3、これには理由があり、置いた避難場所によって得点が変わってきてしまうのです。
簡潔に言うと
2階セカ>2階プラ>1階
となります。
つまり、一番高得点を取れるのは、2階のセカンダリの方の避難場所に缶を二つとも押し込む方法ですね。
でもそれをするとなると、被災者を持って坂を上ったり、倒さずに2つの缶をあの狭い中に押しこむ必要がありますね。
さて、こんなことができるチームは現れるのでしょうか・・・
チームは当日のくじで決定するので、いくら自分のロボットが優れていても、相手もそうでないと・・・難しいですよね。
まぁそういったパフォーマンスにも期待です。
また、1階の避難場所は被災者がとりあえず入ればいいという、2010ルールに準じていますが、
2階の避難場所は2011の厳しい方のルールに準じています。
その他のルールは2011ロボカップジュニアレスキュールールに準じているはずです。
また、競技進行停止の原点は5点となっています。
とりあえずこんな感じの派生レスキューみたいな競技となっています。
なんか本家のレスキューAより難しいような・・・
とりあえずうちの高専からは、この競技に1名参加することになりました。
彼には高専の実力とやらを見せつけてほしいですね(投げやり)
え?僕ですか?僕は・・・・
それではーさよーならー
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ