RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
結局、どちらがいいのでしょうね。
僕は今、NXTを使っています。でも去年まではRCXを使用していました。
学校のNXTがあったのに、あえてRCXを使用しました。
しかし生産終了もあり、もう最近ではRCXでロボットを作っている人は余り見かけなくなりましたね。
LEGOのロボットは大抵がNXTです。
「新しいから」と言う理由だけで乗り換えた人もいるでしょうが、RCXでも十分強いロボットは作れます。
さて、RCXとNXT。登場した年は約10年離れています。
10年の年代差はどのような違いを生むのか、今日はその違いを具体的に挙げていこうと思います。
まずは、入力、RCXはアナログの3ポートのみ、
NXTは4ポート。
しかも1ポートにアナログのポートとI2CとRS485が使用できる2線シリアルポートの2種類が含まれていて、
(RS485は現在ポート4のみ対応のようです)
実質的には合計8ポートとなっています。
しかもI2Cを使えば、使用できるセンサーの数は3桁に跳ね上がります。
そして出力。ポート数は同じですが、NXTには回転角度検知の信号線が含まれており、
その上RCXが500mAしか流せないのに比べて、
NXTは電池の流せる限界ギリギリの電流まで流すことができるようです。
更に処理。RCXは1つの処理を行うのに「何故か」6ms(0.006秒)もかかりますが、
NXTは最低でも0.1μs(0.0000001秒)以下の速度で処理を行えます。(恐らくもっと早い。今度調べてみます)
また、プログラムのダウンロードも無線のRCXに比べて有線のNXTは格段に速く、
また、メモリの量(プラグラムの入る大きさ)もNXTのほうがだいぶ大きいです。
それにしてもRCXの通信が無線(正確には赤外線)というあたりには、やっぱり古さを感じさせますね。
無線といったら古いというイメージが頭の中で固定してて・・・(笑)
このように性能だけで考えればNXTのほうが圧倒的ですね。まぁ10年・・・当たり前ですが。
でもいいことばっかりではないんですよ。
NXTにあってRCXない弱点もいっぱいあります
例えば・・・
・大きすぎる
・プログラムソフトが不十分
・電池がすぐなくなる(乾電池で2時間で切れるくらいです)
・本体仕様に不明な点がある
・クローラーがすべる(坂で)
・重い
・基本的にペグで組まなくてはいけないので少し難しい
・うるさい(夜中に動かすと怒られる)
・部品がRCX時代に比べてちゃっちい(ような気がする)
・モーターの回転方向がプログラムでしか変えられない
・コードが邪魔(太い)
・電流量の問題でモーターのパワーを最大にすると電源が落ちる。(ことがある)
まぁこんなかんじ、上げればキリがないですね。
要するに新しいだけが全てじゃない。と言うわけです。
それでも今年はNXTなんですけどね。
それではーノ
(^・ω・)ノRadiumProduction in RoboCupJunior
僕は今、NXTを使っています。でも去年まではRCXを使用していました。
学校のNXTがあったのに、あえてRCXを使用しました。
しかし生産終了もあり、もう最近ではRCXでロボットを作っている人は余り見かけなくなりましたね。
LEGOのロボットは大抵がNXTです。
「新しいから」と言う理由だけで乗り換えた人もいるでしょうが、RCXでも十分強いロボットは作れます。
さて、RCXとNXT。登場した年は約10年離れています。
10年の年代差はどのような違いを生むのか、今日はその違いを具体的に挙げていこうと思います。
まずは、入力、RCXはアナログの3ポートのみ、
NXTは4ポート。
しかも1ポートにアナログのポートとI2CとRS485が使用できる2線シリアルポートの2種類が含まれていて、
(RS485は現在ポート4のみ対応のようです)
実質的には合計8ポートとなっています。
しかもI2Cを使えば、使用できるセンサーの数は3桁に跳ね上がります。
そして出力。ポート数は同じですが、NXTには回転角度検知の信号線が含まれており、
その上RCXが500mAしか流せないのに比べて、
NXTは電池の流せる限界ギリギリの電流まで流すことができるようです。
更に処理。RCXは1つの処理を行うのに「何故か」6ms(0.006秒)もかかりますが、
NXTは最低でも0.1μs(0.0000001秒)以下の速度で処理を行えます。(恐らくもっと早い。今度調べてみます)
また、プログラムのダウンロードも無線のRCXに比べて有線のNXTは格段に速く、
また、メモリの量(プラグラムの入る大きさ)もNXTのほうがだいぶ大きいです。
それにしてもRCXの通信が無線(正確には赤外線)というあたりには、やっぱり古さを感じさせますね。
無線といったら古いというイメージが頭の中で固定してて・・・(笑)
このように性能だけで考えればNXTのほうが圧倒的ですね。まぁ10年・・・当たり前ですが。
でもいいことばっかりではないんですよ。
NXTにあってRCXない弱点もいっぱいあります
例えば・・・
・大きすぎる
・プログラムソフトが不十分
・電池がすぐなくなる(乾電池で2時間で切れるくらいです)
・本体仕様に不明な点がある
・クローラーがすべる(坂で)
・重い
・基本的にペグで組まなくてはいけないので少し難しい
・うるさい(夜中に動かすと怒られる)
・部品がRCX時代に比べてちゃっちい(ような気がする)
・モーターの回転方向がプログラムでしか変えられない
・コードが邪魔(太い)
・電流量の問題でモーターのパワーを最大にすると電源が落ちる。(ことがある)
まぁこんなかんじ、上げればキリがないですね。
要するに新しいだけが全てじゃない。と言うわけです。
それでも今年はNXTなんですけどね。
それではーノ
(^・ω・)ノRadiumProduction in RoboCupJunior
電池を変えたらちょっと早くなりましたがまだやっぱりのろのろですね。
今年は速度で攻めようという予定があったんですが、 どうやら方針転換に迫られているようです。
ロボットもできてないし・・・
というわけで今日は現実逃避(期末的な意味で)も兼ねて、昔のロボットの紹介です。
といってもこの機体・・・何回も紹介してますよね。これからも何回も紹介しますよ(笑)
まぁ他の子達もいるので他の子達の紹介も今度致します。
今までのRadiumは「ハウルの動く城」だの「レスキューロボットの皮を被った戦車」だのと
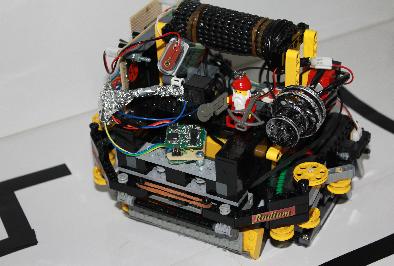
内外からよく「ごっつい」と言われるような外見のロボットの作っていますが、
実は個人的に、スタイルとしてはシンプル、そして確実、
そして「静か」を貫いてきました。
特に音に関してはよく周りの人に驚かれましたね
「無音だ!」とか叫ばれていた時期もありましたが、無音ではないんですよー。
それでも、自作機とかNXT、学校のRCXとかに比べるとやっぱり静かですね。たまに動かすと驚きますよ。
あとエボルタなんで地味に速いです。特に電池変えた後とかはおかしいです。
でも電池一年以上変えてないなー。今変えたらやっぱりむっちゃ速くなんだろうなー。
今のところ、作っているNXTのロボットは、このロボットに匹敵するライントレースは未だできないままです。
いったいこんなのどうやって作ったのか・・・
プログラムのソースがUSBの焼失←によって消失したので永遠の謎になってしまいました。
なんで焼失したかって?PICでUSBメモリの読み出した時に短絡して(うわなにするやめry
というわけで今のところ、このロボットを超えるライントレースをすることが当面の目的です。
達成できる気配すらありませんが(笑)
ちなみにライントレースは補助基盤がなくてもできるようになってます。
その補助基盤の写真がこれ。ずいぶん昔に作ったのでいろいろと残念ですが・・・
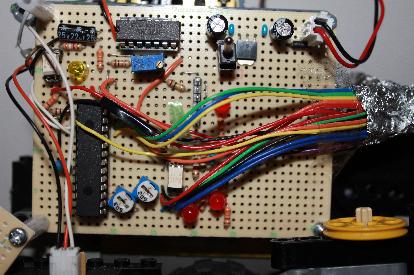
簡単に説明すると左下のゲジゲジがPICというマイクロコントローラーです。16F873Aって書いてありました。
結構古い型使ってたんですね。てっきり24Fだと思ってた。
その隣のネジっぽいやつが可変抵抗。これは緑センサー用のLEDの明るさの調整用です。
確かフルカラーだったはず。
それでその隣にある白いのとPICの上にある白いのがフォトカプラという素子です。
これは(説明略)というもので、これをPICで制御してRCXと通信してました。
上のフォトカプラの近くの黄LEDが恐らく通信のデバッカです
LEDの可変抵抗の近くの赤LEDは緑の検知を示すLEDです。
これはセンサーの値を直接デジ値で出してるのではなく、PICから出力しています
ちなみにその右にある上下2つの赤LEDは水銀の検知デバッカです。
上のLEDの上の部分が電源部分でその左にあるICとかその辺が緑センサーのデジタル変換部です。
でも結果的に緑センサーがアナログに変更されたので使ってません。ただ電気食ってるだけです。
残りのセンサーはPICに直接接続されています。コードの束があるのはそのためです。
これで一通り説明かな。
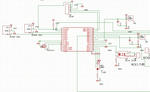
最後に回路図です。最後の変更からフィードバックしてない気がするので間違ってるかも。
ちなみに緑センサーのデジタル部分はないです。

今思えばシンガポールで24Fのことふつうに「にーよんえふ」って言ってたけどなんで通じたんだろう。
(^・ω・)ノRadiumProduction in RoboCupJunior
今年は速度で攻めようという予定があったんですが、 どうやら方針転換に迫られているようです。
ロボットもできてないし・・・
というわけで今日は現実逃避(期末的な意味で)も兼ねて、昔のロボットの紹介です。
といってもこの機体・・・何回も紹介してますよね。これからも何回も紹介しますよ(笑)
まぁ他の子達もいるので他の子達の紹介も今度致します。
今までのRadiumは「ハウルの動く城」だの「レスキューロボットの皮を被った戦車」だのと
内外からよく「ごっつい」と言われるような外見のロボットの作っていますが、
実は個人的に、スタイルとしてはシンプル、そして確実、
そして「静か」を貫いてきました。
特に音に関してはよく周りの人に驚かれましたね
「無音だ!」とか叫ばれていた時期もありましたが、無音ではないんですよー。
それでも、自作機とかNXT、学校のRCXとかに比べるとやっぱり静かですね。たまに動かすと驚きますよ。
あとエボルタなんで地味に速いです。特に電池変えた後とかはおかしいです。
でも電池一年以上変えてないなー。今変えたらやっぱりむっちゃ速くなんだろうなー。
今のところ、作っているNXTのロボットは、このロボットに匹敵するライントレースは未だできないままです。
いったいこんなのどうやって作ったのか・・・
プログラムのソースがUSBの焼失←によって消失したので永遠の謎になってしまいました。
なんで焼失したかって?PICでUSBメモリの読み出した時に短絡して(うわなにするやめry
というわけで今のところ、このロボットを超えるライントレースをすることが当面の目的です。
達成できる気配すらありませんが(笑)
ちなみにライントレースは補助基盤がなくてもできるようになってます。
その補助基盤の写真がこれ。ずいぶん昔に作ったのでいろいろと残念ですが・・・
簡単に説明すると左下のゲジゲジがPICというマイクロコントローラーです。16F873Aって書いてありました。
結構古い型使ってたんですね。てっきり24Fだと思ってた。
その隣のネジっぽいやつが可変抵抗。これは緑センサー用のLEDの明るさの調整用です。
確かフルカラーだったはず。
それでその隣にある白いのとPICの上にある白いのがフォトカプラという素子です。
これは(説明略)というもので、これをPICで制御してRCXと通信してました。
上のフォトカプラの近くの黄LEDが恐らく通信のデバッカです
LEDの可変抵抗の近くの赤LEDは緑の検知を示すLEDです。
これはセンサーの値を直接デジ値で出してるのではなく、PICから出力しています
ちなみにその右にある上下2つの赤LEDは水銀の検知デバッカです。
上のLEDの上の部分が電源部分でその左にあるICとかその辺が緑センサーのデジタル変換部です。
でも結果的に緑センサーがアナログに変更されたので使ってません。ただ電気食ってるだけです。
残りのセンサーはPICに直接接続されています。コードの束があるのはそのためです。
これで一通り説明かな。
最後に回路図です。最後の変更からフィードバックしてない気がするので間違ってるかも。
ちなみに緑センサーのデジタル部分はないです。
今思えばシンガポールで24Fのことふつうに「にーよんえふ」って言ってたけどなんで通じたんだろう。
(^・ω・)ノRadiumProduction in RoboCupJunior
皆さん。ロボカップジュニアでロボットを作るとき、まずは何について考えますか?
直ぐに要所要所の構造を考える人もいれば、大まかな形を直ぐに考える人もいるでしょう。
中には何も考えずに作り始めちゃう方もいるかもしれません。
そんな色んな人たちがいる中で、僕はどうしているか・・・というと。
まずは「なにがしたい」かを明確に考えます。
この「なにがしたい」というのは、どんな風に動かして、何を判断できるロボットを作るのか。
それを考えます。
実はもうこれだけでロボットの形状は殆ど決定してしまいます。
まず、自分の動かしたいように動くロボットを作ろうとすると、重心の位置、サイズが決まってきます。
もうその時点でロボットの大体の外形は決まってきてしまうのです。
そして何を判断するか。ロボットは基本的にセンサーを利用して周りの状況を判断するので、
「何を検知するかを決める」ということは、そのまま「どんなセンサーを使うか」ということなので
使用するセンサーも決まってきてしまいます。
これだけ決まればロボットの形状はほぼ完全に決まってしまいますよね?
。
というわけでまず、「なにがしたい」か、を考えてロボットの形を決めます。
次は「なにで作る」かです。
この「なにで作る」というのはロボットのベースの素材のことです。言い方を変えれば使用するキット?
例えばLEGO

日本のレスキューでは千葉以外の関東圏で一番多くみられる傾向があるようです。
というより他では殆ど見ない?かな?
これはラーニングシステム社が販売している教育用ロボットキットでLEGOブロックで構成されています。
中枢となるコアはLEGOMindStormというブロック。
この中に全ての制御基板と電池が内臓されています。マイコンでいうメインボード的なものでしょうか。
RIS(”ろぼてぃっくすいんべんしょんしすてむ”だったかな)というシステムを採用したロボットキットだったっけ。
この辺は昔僕が書いた論文に全部かいてあるんですが、どこにやったっけなぁ・・・(笑)
今までに大きく分けて4種類のMindStormが販売され、その中の3種類は既に生産を終了しています。
これがその4種類です。
RCX

入出力それそれ3ポートずつあり、外部でセンサー、。モーター等を接続できます。入力は全てアナログです。
PCでプログラムを組み、それを赤外線通信でダウンロードして走ります。ダウンロードが無茶苦茶遅いです。
また、中身はH8マイコンなのですが、何を血迷ったのか事実上のクロック周期が6msという仕様になっています。
なので素早い動きにはセンサーがついていけません。
現在、1.0と1.5と2.0の3種類がありますが、実際どれも大差ありません。何れも生産終了です。
SCOUT

小さいプログラムならPCいらずでプログラムが組めるというブロックです。
しかし、外部入出力ともに2ポートである上に、セットにライトセンサーが含まれてないことからか、
これでロボカップに出場していたロボットは過去に一度しか見たことがありませんね。
PCでのプログラムはRCXのものと同じように組むことができます。内部の仕様は余り変わらないみたい。
赤外線受光機の隣にライトセンサーが内蔵されていますが、レスキューでは果たして使い道があるのか・・・?
サッカー競技では何とか使えそうです。
DROID

ボタンが3つ。とても単純ですね。
これはプログラムは一切組むことができず、7つの内蔵プログラムを選択して実行させることしかできません。
外部入出力もないのでロボカップ競技に使うのは難しいです。というかムリ?
現にこれを使用していたロボットはみたことないですね。。。
NXT

唯一、現在生産が終了していないMindstormがこのNXTです。
事実上のRCXの後継機ですが他のシリーズより10年以上新しいものなので、
他のシリーズには無い様々な機能があります。
まずPCからのプログラムダウンロードが有線になったので格段に速度が上がりました。
次にモーターが大きく、力強くなりました。
RCXのモーターは消費電流が500mAしかなくて、凄く電池が長持ちしたのですがその分パワーが残念でした。
しかし、NXTのモーターは非常に高い消費電力で、
尚且つ内部にギアボックスが組まれているのでRCXと比べると凄いパワーがでます。
しかしその分電池の減りは早いです。
因みにサーボモーターとか書いてありますが実際は擬似サーボです。嘘っぱちです。
次に動作速度、特にセンサーの応答速度が格段に速くなったので、素早い動きにもついていけるようになりました。
そして大きいのが入力ポートです。4つに増えた上に、
そのそれぞれが既存のアナログ入力以外にI2Cの通信規格を採用したので、
事実上アナログ(4)+I2C(4*112)で合計452個のセンサーの制御が可能となっています。
LEGOの説明はこのぐらいでしょう。
他にもLEGOスパイボットというものも存在しますが、あれもレスキュー競技ではあまり使い道がありません。
次はTJ3です。

ダイセン工業株式会社が販売しているロボットキットで関西圏で人気があるようです。
これもLEGOと同じように複数のセンサーの搭載が可能となっています。
また、大きな特徴としてタミヤの工作パーツ等の取り付けが容易となっていて
気軽に擬似自作ロボットのようなものの作成ができるようになっています。
販売されているセンサーも、かなりロボカップを意識した構成となっているので
基本的にはプログラムを組むだけで簡単に高度なレスキューロボットの作成が行えるようになっています。
次はロボデザイナーです。

昔は埼玉でよくみかけましたが、今のレスキューでは殆ど見かけなくなりました。絶滅危惧種です。
なぜ昔はたくさんいたのに今は絶滅寸前になってしまっているかというと・・・一度使ってみればわかります。
セットのタッチセンサーは押されにくいし、
セットのライトセンサーはラインの反応は鈍いし、
アナログの入力は少ないし、
モーターの速度制御のプログラムがほとんど動きに反映されてないし、
セットの電池は単1(単2だったかも)で重たいし使いにくし、
セットのプログラマは使いにくいし、
そもそもセットのギアボックスの性能が酷くてただ前進させるだけでも結構高度なプログラムがいるし、
・・・でそれらを全て解決していくうちにあることに気がつくんです。
「これじゃ只の自作じゃん・・・」と。
というわけで最後は自作機についてです。
自作機というものについて、皆さんそれぞれ解釈があると思いますが、ここでは
「ロボット本体も中の回路もオリジナル製作」というものということにしておきます。
あ、タミヤの工作パーツ等の使用は自作に含まれます。あと汎用のセンサーモジュールの使用も含まれます。
これの利点は汎用のロボットキットを使用しないから競技にあわせたロボットの仕様が用意に作れます。
ロボットの形状もキットに存在したある程度の制約を無視でき、また、センサー等の使用に限度がないので
一番自由にロボットを作成できる方法といえるでしょう。
また、自由に作れるという点から競技に合わせた、競技専用のロボットが作れるので、
しっかり作れば一番強いと言う利点があります。
反面、一から作るので時間はかかるし、メーカー品ではないので安定性に疑問が残ってしまいます。
力量以上のものは作れないので、人間側の実力がキット以上に必要になってきてしまいます。
なので初心者や機械構造、電子回路両方にに自信の無い人にはお勧めできませんね。
その点を補うためか、自作機のチームは複数人数いることが多いようですね。
なーんて長い説明致しましたが、結局、僕は何を使おうか。ということになるんですね。
僕の手元には紹介したものはDROID以外は全てあるので(自作経験もあるし)選択範囲は広いのですが、
SCOUTは使う気になれないので却下、
ロボデザイナーは問題外なので降ろし、
自作機は設計済みなんですが、時間がなさそうなので今年も見送り、
残る選択肢はRCXとNXTとTJ3です。
しかし、RCXのモーターとそれに合わせたRCXの出力ポートはパワーが低く、
重りの入った缶を持ち上げ、移動させなければならない新ルールの上では不利と判断し、断念しました。
TJ3はその点有利なのですが、
ロボデザイナーと同じように、ロボットの外形は自作しなければ競技に対応できないことと、
「なんか使うのがイヤ」だったのでNXTにしました。
結局これに落ち着いちゃったよ・・・
と云うわけで今年もLEGOです。
因みにロボデザイナーが昔多かったのは、昔は競技が簡単だったので、
あの問題を解決しなくてもある程度勝ち進めたからなんですよね。結局。
あ。因みにロボデザイナーはサッカーでは結構使えますよ。あのセンサーはボールの検出は行いやすいし、
アナログの入力はあまりいらないし、タッチセンサー使わないし。
残りの問題を解決すれば十分実践対応できます。適材適所ってやつですかね。
LEGOはサッカーじゃ使えないのと同じです。
(^・ω・)ノRadiumProduction in RoboCupJunior
直ぐに要所要所の構造を考える人もいれば、大まかな形を直ぐに考える人もいるでしょう。
中には何も考えずに作り始めちゃう方もいるかもしれません。
そんな色んな人たちがいる中で、僕はどうしているか・・・というと。
まずは「なにがしたい」かを明確に考えます。
この「なにがしたい」というのは、どんな風に動かして、何を判断できるロボットを作るのか。
それを考えます。
実はもうこれだけでロボットの形状は殆ど決定してしまいます。
まず、自分の動かしたいように動くロボットを作ろうとすると、重心の位置、サイズが決まってきます。
もうその時点でロボットの大体の外形は決まってきてしまうのです。
そして何を判断するか。ロボットは基本的にセンサーを利用して周りの状況を判断するので、
「何を検知するかを決める」ということは、そのまま「どんなセンサーを使うか」ということなので
使用するセンサーも決まってきてしまいます。
これだけ決まればロボットの形状はほぼ完全に決まってしまいますよね?
。
というわけでまず、「なにがしたい」か、を考えてロボットの形を決めます。
次は「なにで作る」かです。
この「なにで作る」というのはロボットのベースの素材のことです。言い方を変えれば使用するキット?
例えばLEGO
日本のレスキューでは千葉以外の関東圏で一番多くみられる傾向があるようです。
というより他では殆ど見ない?かな?
これはラーニングシステム社が販売している教育用ロボットキットでLEGOブロックで構成されています。
中枢となるコアはLEGOMindStormというブロック。
この中に全ての制御基板と電池が内臓されています。マイコンでいうメインボード的なものでしょうか。
RIS(”ろぼてぃっくすいんべんしょんしすてむ”だったかな)というシステムを採用したロボットキットだったっけ。
この辺は昔僕が書いた論文に全部かいてあるんですが、どこにやったっけなぁ・・・(笑)
今までに大きく分けて4種類のMindStormが販売され、その中の3種類は既に生産を終了しています。
これがその4種類です。
RCX
入出力それそれ3ポートずつあり、外部でセンサー、。モーター等を接続できます。入力は全てアナログです。
PCでプログラムを組み、それを赤外線通信でダウンロードして走ります。ダウンロードが無茶苦茶遅いです。
また、中身はH8マイコンなのですが、何を血迷ったのか事実上のクロック周期が6msという仕様になっています。
なので素早い動きにはセンサーがついていけません。
現在、1.0と1.5と2.0の3種類がありますが、実際どれも大差ありません。何れも生産終了です。
SCOUT
小さいプログラムならPCいらずでプログラムが組めるというブロックです。
しかし、外部入出力ともに2ポートである上に、セットにライトセンサーが含まれてないことからか、
これでロボカップに出場していたロボットは過去に一度しか見たことがありませんね。
PCでのプログラムはRCXのものと同じように組むことができます。内部の仕様は余り変わらないみたい。
赤外線受光機の隣にライトセンサーが内蔵されていますが、レスキューでは果たして使い道があるのか・・・?
サッカー競技では何とか使えそうです。
DROID
ボタンが3つ。とても単純ですね。
これはプログラムは一切組むことができず、7つの内蔵プログラムを選択して実行させることしかできません。
外部入出力もないのでロボカップ競技に使うのは難しいです。というかムリ?
現にこれを使用していたロボットはみたことないですね。。。
NXT
唯一、現在生産が終了していないMindstormがこのNXTです。
事実上のRCXの後継機ですが他のシリーズより10年以上新しいものなので、
他のシリーズには無い様々な機能があります。
まずPCからのプログラムダウンロードが有線になったので格段に速度が上がりました。
次にモーターが大きく、力強くなりました。
RCXのモーターは消費電流が500mAしかなくて、凄く電池が長持ちしたのですがその分パワーが残念でした。
しかし、NXTのモーターは非常に高い消費電力で、
尚且つ内部にギアボックスが組まれているのでRCXと比べると凄いパワーがでます。
しかしその分電池の減りは早いです。
因みにサーボモーターとか書いてありますが実際は擬似サーボです。嘘っぱちです。
次に動作速度、特にセンサーの応答速度が格段に速くなったので、素早い動きにもついていけるようになりました。
そして大きいのが入力ポートです。4つに増えた上に、
そのそれぞれが既存のアナログ入力以外にI2Cの通信規格を採用したので、
事実上アナログ(4)+I2C(4*112)で合計452個のセンサーの制御が可能となっています。
LEGOの説明はこのぐらいでしょう。
他にもLEGOスパイボットというものも存在しますが、あれもレスキュー競技ではあまり使い道がありません。
次はTJ3です。
ダイセン工業株式会社が販売しているロボットキットで関西圏で人気があるようです。
これもLEGOと同じように複数のセンサーの搭載が可能となっています。
また、大きな特徴としてタミヤの工作パーツ等の取り付けが容易となっていて
気軽に擬似自作ロボットのようなものの作成ができるようになっています。
販売されているセンサーも、かなりロボカップを意識した構成となっているので
基本的にはプログラムを組むだけで簡単に高度なレスキューロボットの作成が行えるようになっています。
次はロボデザイナーです。
昔は埼玉でよくみかけましたが、今のレスキューでは殆ど見かけなくなりました。絶滅危惧種です。
なぜ昔はたくさんいたのに今は絶滅寸前になってしまっているかというと・・・一度使ってみればわかります。
セットのタッチセンサーは押されにくいし、
セットのライトセンサーはラインの反応は鈍いし、
アナログの入力は少ないし、
モーターの速度制御のプログラムがほとんど動きに反映されてないし、
セットの電池は単1(単2だったかも)で重たいし使いにくし、
セットのプログラマは使いにくいし、
そもそもセットのギアボックスの性能が酷くてただ前進させるだけでも結構高度なプログラムがいるし、
・・・でそれらを全て解決していくうちにあることに気がつくんです。
「これじゃ只の自作じゃん・・・」と。
というわけで最後は自作機についてです。
自作機というものについて、皆さんそれぞれ解釈があると思いますが、ここでは
「ロボット本体も中の回路もオリジナル製作」というものということにしておきます。
あ、タミヤの工作パーツ等の使用は自作に含まれます。あと汎用のセンサーモジュールの使用も含まれます。
これの利点は汎用のロボットキットを使用しないから競技にあわせたロボットの仕様が用意に作れます。
ロボットの形状もキットに存在したある程度の制約を無視でき、また、センサー等の使用に限度がないので
一番自由にロボットを作成できる方法といえるでしょう。
また、自由に作れるという点から競技に合わせた、競技専用のロボットが作れるので、
しっかり作れば一番強いと言う利点があります。
反面、一から作るので時間はかかるし、メーカー品ではないので安定性に疑問が残ってしまいます。
力量以上のものは作れないので、人間側の実力がキット以上に必要になってきてしまいます。
なので初心者や機械構造、電子回路両方にに自信の無い人にはお勧めできませんね。
その点を補うためか、自作機のチームは複数人数いることが多いようですね。
なーんて長い説明致しましたが、結局、僕は何を使おうか。ということになるんですね。
僕の手元には紹介したものはDROID以外は全てあるので(自作経験もあるし)選択範囲は広いのですが、
SCOUTは使う気になれないので却下、
ロボデザイナーは問題外なので降ろし、
自作機は設計済みなんですが、時間がなさそうなので今年も見送り、
残る選択肢はRCXとNXTとTJ3です。
しかし、RCXのモーターとそれに合わせたRCXの出力ポートはパワーが低く、
重りの入った缶を持ち上げ、移動させなければならない新ルールの上では不利と判断し、断念しました。
TJ3はその点有利なのですが、
ロボデザイナーと同じように、ロボットの外形は自作しなければ競技に対応できないことと、
「なんか使うのがイヤ」だったのでNXTにしました。
結局これに落ち着いちゃったよ・・・
と云うわけで今年もLEGOです。
因みにロボデザイナーが昔多かったのは、昔は競技が簡単だったので、
あの問題を解決しなくてもある程度勝ち進めたからなんですよね。結局。
あ。因みにロボデザイナーはサッカーでは結構使えますよ。あのセンサーはボールの検出は行いやすいし、
アナログの入力はあまりいらないし、タッチセンサー使わないし。
残りの問題を解決すれば十分実践対応できます。適材適所ってやつですかね。
LEGOはサッカーじゃ使えないのと同じです。
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ