RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
ぐぉんぐぉんぐぉん。
直線のライン上なのに前進をしない。今はこういった状態です。
完璧に事故ってる・・・(泣)
という訳でライントレースの改良を行った今日の部活でした。
といっても午前中はこの子の解析に明け暮れましたけど・・・

今日の午前中だけでセンサーの使い方、特性はわかりました。
まぁこれだけでも大体の用途は特定されちゃいますね。
まぁコイツの実態に関してはまた今度の記事で紹介しましょう。
結構驚愕の結果が出ているのですけど・・・まぁ今その話をしても仕方がないでしょう。
というよりめんどくさい(笑)
そして午後、輪ゴム鯖ゲーの後は部活です。
僕は例のライントレースの修正を、相方は2階のプログラムの作成を行っていました。
2階は相方任せなので逆に言うと、1階はちゃんとしないと・・・と思うのですが
どうにも暴走しています。どうしてこうなった。まだバグも見られますからね。
最近気が付いたのですが、たまにNXCは分岐上ではありえないような分岐のルートを取ることがあるらしく、
そのデバックも重要な課題となりそうです。
あるタイミングで首振りを行わなかったり・・・とかね(苦笑)
まぁ僕のプログラムは世間一般様の書き方とはかけ離れているらしく、
他人が絶対起こさないような問題も起こすことがあるのですよね。
やっぱり定型にはめた方がいいのかな?普通のCだと結構定型になるのですけど・・・。
やっぱりNXCは個人的には特別ですね。」
とりあえず明日はそのライントレースの件とバンプについての攻略を行おうと思います。
あと坂の検知の方法を変えようかな。
あと2ヶ月ちょい。頑張んなきゃ。
因みにさっきは9時ごろ起きたフランスの原子力の再処理施設で起きた爆発について調べていました。
なんか1時間ですでに立ち入り禁止区域とかでで、炉内の爆発にも拘らず死者とかでちゃってるんですけど・・・。
朝になったらすごいニュースが待っているかもしれませんね。
それでは今日はこの辺で。
すいませんPCのレビューですが、書いて直ぐに忍者お得意の記事消失が発生したので掲載できなくなりました。
精神的に同じような記事がまたかけたら書こうと思います。
(^・ω・)ノ RadiumProduction in RoboCup Junior
直線のライン上なのに前進をしない。今はこういった状態です。
完璧に事故ってる・・・(泣)
という訳でライントレースの改良を行った今日の部活でした。
といっても午前中はこの子の解析に明け暮れましたけど・・・
今日の午前中だけでセンサーの使い方、特性はわかりました。
まぁこれだけでも大体の用途は特定されちゃいますね。
まぁコイツの実態に関してはまた今度の記事で紹介しましょう。
結構驚愕の結果が出ているのですけど・・・まぁ今その話をしても仕方がないでしょう。
というよりめんどくさい(笑)
そして午後、輪ゴム鯖ゲーの後は部活です。
僕は例のライントレースの修正を、相方は2階のプログラムの作成を行っていました。
2階は相方任せなので逆に言うと、1階はちゃんとしないと・・・と思うのですが
どうにも暴走しています。どうしてこうなった。まだバグも見られますからね。
最近気が付いたのですが、たまにNXCは分岐上ではありえないような分岐のルートを取ることがあるらしく、
そのデバックも重要な課題となりそうです。
あるタイミングで首振りを行わなかったり・・・とかね(苦笑)
まぁ僕のプログラムは世間一般様の書き方とはかけ離れているらしく、
他人が絶対起こさないような問題も起こすことがあるのですよね。
やっぱり定型にはめた方がいいのかな?普通のCだと結構定型になるのですけど・・・。
やっぱりNXCは個人的には特別ですね。」
とりあえず明日はそのライントレースの件とバンプについての攻略を行おうと思います。
あと坂の検知の方法を変えようかな。
あと2ヶ月ちょい。頑張んなきゃ。
因みにさっきは9時ごろ起きたフランスの原子力の再処理施設で起きた爆発について調べていました。
なんか1時間ですでに立ち入り禁止区域とかでで、炉内の爆発にも拘らず死者とかでちゃってるんですけど・・・。
朝になったらすごいニュースが待っているかもしれませんね。
それでは今日はこの辺で。
すいませんPCのレビューですが、書いて直ぐに忍者お得意の記事消失が発生したので掲載できなくなりました。
精神的に同じような記事がまたかけたら書こうと思います。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今日は・・・部員が少なかった・・・
なんと総勢で3人しかいませんでした。昨日の4分の1・・・(笑)
しかも全員レスキューです。今日は部室が広いぞ・・・
今日は部員も少なく、会議なども無いので丸一日チームの活動に使うことができました。
今日の課題は坂の検知と障害物でした。
とりあえずまたバンパーを作り変えて、その後は坂の調整と、昨日のコンパスの確認を行いました。
割と様になっていたのですが、
残念ながら、午後になって問題が浮上。
普段はぬるぬるとライントレースを行うのですが、不定期でガッ、ガッと痙攣します。
別にそれで脱線をするわけではないのである意味問題はないのですが、
見栄えが悪いので直すことに。
なんかバックしているように見えたので、BricxCCの検索でバックしているところを検索します。
・・・アレ?障害物、坂。これ以外ではバックの命令はありません。
とりあえずこの辺をプログラムから外してみました。
・・・改善の見込みなしorz
次に、バックではなく、急速停止しているのではないかと思い、停止の命令も探してみます。
・・・停止ねーし(笑)
止まる可能性は満にひとつもなくなりました♪
じゃあやっぱりバックしてるのか・・・。
と云うわけでいつものパターン、プログラムをどんどん消して原因を探します。
・・・全部消えましたorz
どうやら断片的なプログラムミスではなくて、プログラムのブロック同士の校合の問題のようです。
これはめんどくさい・・・(苦笑)
そんな感じで突き詰めていった結果、
ギャップのプログラムとライントレースのプログラムの校合が原因であることがわかりました。
結構致命的なような・・・逆に今までよくライントレースできてたなぁ(笑)
と云うわけで解決しました。
まぁこれで汚くはなくなったように思えます。
ただ、まだ問題がひとつ。
「意味不明なコースアウト」があるんです。
なんでもないカーブや直線でたまにすっ飛ぶんです。
RCXのときにはこういったことはなかったのですけど・・・難しいなぁ。
それも解決したかったのですけど、残念ながら時間切れに。
と云うわけで次回に持ち越しー。
因みにその次回とやらは来週の水曜日だったりー。
とりあえずそれまでにもう一度プログラムくらいは確認しておこうかな。
一先ず今日はこのあたりで。
(^・ω・)ノ RadiumProduction in RoboCup Junior
なんと総勢で3人しかいませんでした。昨日の4分の1・・・(笑)
しかも全員レスキューです。今日は部室が広いぞ・・・
今日は部員も少なく、会議なども無いので丸一日チームの活動に使うことができました。
今日の課題は坂の検知と障害物でした。
とりあえずまたバンパーを作り変えて、その後は坂の調整と、昨日のコンパスの確認を行いました。
割と様になっていたのですが、
残念ながら、午後になって問題が浮上。
普段はぬるぬるとライントレースを行うのですが、不定期でガッ、ガッと痙攣します。
別にそれで脱線をするわけではないのである意味問題はないのですが、
見栄えが悪いので直すことに。
なんかバックしているように見えたので、BricxCCの検索でバックしているところを検索します。
・・・アレ?障害物、坂。これ以外ではバックの命令はありません。
とりあえずこの辺をプログラムから外してみました。
・・・改善の見込みなしorz
次に、バックではなく、急速停止しているのではないかと思い、停止の命令も探してみます。
・・・停止ねーし(笑)
止まる可能性は満にひとつもなくなりました♪
じゃあやっぱりバックしてるのか・・・。
と云うわけでいつものパターン、プログラムをどんどん消して原因を探します。
・・・全部消えましたorz
どうやら断片的なプログラムミスではなくて、プログラムのブロック同士の校合の問題のようです。
これはめんどくさい・・・(苦笑)
そんな感じで突き詰めていった結果、
ギャップのプログラムとライントレースのプログラムの校合が原因であることがわかりました。
結構致命的なような・・・逆に今までよくライントレースできてたなぁ(笑)
と云うわけで解決しました。
まぁこれで汚くはなくなったように思えます。
ただ、まだ問題がひとつ。
「意味不明なコースアウト」があるんです。
なんでもないカーブや直線でたまにすっ飛ぶんです。
RCXのときにはこういったことはなかったのですけど・・・難しいなぁ。
それも解決したかったのですけど、残念ながら時間切れに。
と云うわけで次回に持ち越しー。
因みにその次回とやらは来週の水曜日だったりー。
とりあえずそれまでにもう一度プログラムくらいは確認しておこうかな。
一先ず今日はこのあたりで。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今日は大会後初めて坂を使いました。
といってもロボットは荒ぶるだけでしたけど・・・。
それにしても、ライントレースが未だにできていないのに、何故坂に移行するのか、
そんな目で部員が見ているようだったので一応答えておきますが、
今回、ちょっと坂センサーに3次元加速度センサーを採用しているのです。
ところが、ちょっとこれ、反応速度が遅いのですね。
なのでライントレース中に坂の確認をさせようとすると、
どんなに頑張ってもライントレースに遅れと言うかズレと言うか、まぁ支障が出るのですね。
なので先に坂の検出のプログラムを作っちゃって、
そのプログラムに合わせて、遅延に対応したライントレースプログラムを作ろうという結論に至ったのです。
つまり、今までのライントレースプログラム作成の時間は全て無駄になった、というわけです(苦笑)
なんか無茶苦茶遠回りしているような・・・掴みきれないのもこういうのが原因なんでしょうね・・・orz
うーん。もっと考えようよ。自分。
(^・ω・)ノ RadiumProduction in RoboCup Junior
といってもロボットは荒ぶるだけでしたけど・・・。
それにしても、ライントレースが未だにできていないのに、何故坂に移行するのか、
そんな目で部員が見ているようだったので一応答えておきますが、
今回、ちょっと坂センサーに3次元加速度センサーを採用しているのです。
ところが、ちょっとこれ、反応速度が遅いのですね。
なのでライントレース中に坂の確認をさせようとすると、
どんなに頑張ってもライントレースに遅れと言うかズレと言うか、まぁ支障が出るのですね。
なので先に坂の検出のプログラムを作っちゃって、
そのプログラムに合わせて、遅延に対応したライントレースプログラムを作ろうという結論に至ったのです。
つまり、今までのライントレースプログラム作成の時間は全て無駄になった、というわけです(苦笑)
なんか無茶苦茶遠回りしているような・・・掴みきれないのもこういうのが原因なんでしょうね・・・orz
うーん。もっと考えようよ。自分。
(^・ω・)ノ RadiumProduction in RoboCup Junior
今日はオープンキャンパス第一日目、僕とっては・・・何回目だろう(笑)
何かといろんな立場で来ているので何回目かはわからないや(笑)
とりあえずここ数年は、1個ブースを持って、そこでなんか色々して遊んでいます。
というのも、何をしているかというと、俗にいう部活紹介の展示みたいなことをしているのです。
こういうのは普通部長がやるのが通例だと思う方もいるかと思いますが、うちの場合は何故か。
最小学年がやる、という風な風習のようなものができている・・・ということはお話ししたと思います。
という訳でここ2年間は実質一人でやってきました。
でも今年は一年生がいっぱいいるので、その殆どを一年生に任せてみました。
僕は・・・というと、予定通り、参加してきた知り合いたちとのんびり談笑していました。
若干黒歴史の散布がありましたが・・・
トゥルースの3教室からそれぞれ来てくれた生徒たち、それとKOYO-Robot一行様、お疲れ様でした。
皆さんのお陰で、色々な意味で貴重な話が聞けました。ありがとうございます。
今日はあの後あのまま部活に入りました、でも、副部長のロボットが・・・
展示の時にはあんなに元気に動いていた副部長のロボットが・・・
まさか・・・また分解されるなんて(笑)
いったい何回分解すれば気が済むんですか。しかもまた同じのに戻してるし・・・。
その隙に僕はロボット速度UP大作戦を強行しました。
前にも書きましたが、僕の借りているNXTのモーターは・・・トロイ(泣)
パワー100%で走らせても、他のロボットの50%にも満ちません。
という訳で・・・
作戦その1.モーターを変えてみる。
手術を行いました。
とりあえずモーターをいいやつ・・というより新しいやつに変えてみました。これで少しは・・・
遅くなった・・・orz
なんで?どうして?
その答えは簡単。実はモーターは既存のものの方が優れていたのです。
という訳で作戦その2.タイヤのブレーキになっているような場所を探す。
通常は問題なくても、走行中になるとブレーキになるようなところ・・・
じーっ。ロボットを見ます。
じーっ。
じーっ。
・・・
あっ。
走行部の上半分が走行時にのみ上の部品に完全密着することが発覚。
こりゃ落ちるわ・・・(笑)
という訳で手術が始まりました。
そして10分後・・・。
とりあえず人並みの速度が出るようになりました。良かった良かった(笑)
そして部室を後にする自分。今日はいいことをしたなぁ。
・・・
あっ!
モーター前のに戻しとくの忘れた!
新しいほうにしたまんまだったのです。自分で前のの方がいいということを突き止めたのに!
という訳で明日の最初の活動内容は決定しました。
また手術か・・・。無駄に日をまたぐ壮大な無駄をやらかしました。副部長のこと、いえないな(笑)
明日オープンキャンパスの前に手術かな。はぁ・・・
今日の記事はこれで終了です。これ只の事故だろ・・・
そうそう。今日出た弁当は美味しいごはんでしたよ。美味しいというのは「腹を壊さない」という意味で味はry
(^・ω・)ノ RadiumProduction in RoboCup Junior
P.s因みに僕もまだライントレースができません(笑)
何かといろんな立場で来ているので何回目かはわからないや(笑)
とりあえずここ数年は、1個ブースを持って、そこでなんか色々して遊んでいます。
というのも、何をしているかというと、俗にいう部活紹介の展示みたいなことをしているのです。
こういうのは普通部長がやるのが通例だと思う方もいるかと思いますが、うちの場合は何故か。
最小学年がやる、という風な風習のようなものができている・・・ということはお話ししたと思います。
という訳でここ2年間は実質一人でやってきました。
でも今年は一年生がいっぱいいるので、その殆どを一年生に任せてみました。
僕は・・・というと、予定通り、参加してきた知り合いたちとのんびり談笑していました。
若干黒歴史の散布がありましたが・・・
トゥルースの3教室からそれぞれ来てくれた生徒たち、それとKOYO-Robot一行様、お疲れ様でした。
皆さんのお陰で、色々な意味で貴重な話が聞けました。ありがとうございます。
今日はあの後あのまま部活に入りました、でも、副部長のロボットが・・・
展示の時にはあんなに元気に動いていた副部長のロボットが・・・
まさか・・・また分解されるなんて(笑)
いったい何回分解すれば気が済むんですか。しかもまた同じのに戻してるし・・・。
その隙に僕はロボット速度UP大作戦を強行しました。
前にも書きましたが、僕の借りているNXTのモーターは・・・トロイ(泣)
パワー100%で走らせても、他のロボットの50%にも満ちません。
という訳で・・・
作戦その1.モーターを変えてみる。
手術を行いました。
とりあえずモーターをいいやつ・・というより新しいやつに変えてみました。これで少しは・・・
遅くなった・・・orz
なんで?どうして?
その答えは簡単。実はモーターは既存のものの方が優れていたのです。
という訳で作戦その2.タイヤのブレーキになっているような場所を探す。
通常は問題なくても、走行中になるとブレーキになるようなところ・・・
じーっ。ロボットを見ます。
じーっ。
じーっ。
・・・
あっ。
走行部の上半分が走行時にのみ上の部品に完全密着することが発覚。
こりゃ落ちるわ・・・(笑)
という訳で手術が始まりました。
そして10分後・・・。
とりあえず人並みの速度が出るようになりました。良かった良かった(笑)
そして部室を後にする自分。今日はいいことをしたなぁ。
・・・
あっ!
モーター前のに戻しとくの忘れた!
新しいほうにしたまんまだったのです。自分で前のの方がいいということを突き止めたのに!
という訳で明日の最初の活動内容は決定しました。
また手術か・・・。無駄に日をまたぐ壮大な無駄をやらかしました。副部長のこと、いえないな(笑)
明日オープンキャンパスの前に手術かな。はぁ・・・
今日の記事はこれで終了です。これ只の事故だろ・・・
そうそう。今日出た弁当は美味しいごはんでしたよ。美味しいというのは「腹を壊さない」という意味で味はry
(^・ω・)ノ RadiumProduction in RoboCup Junior
P.s因みに僕もまだライントレースができません(笑)
最初に部連絡ですが、8月の31日にダンスのプレゼンのついでにサマーチャレンジの反省会を行うことになりました。
サマーチャレンジの結果に応じて面白いことになるので期待しておいてください。
また、入賞できなかった子には反省文を書いて貰うことになったので頑張ってやってくださいということです。
あと例のプレゼンシートの電子媒体は此方にメールで提出お願いします。
toaru_sangi_no_rcj@yahoo.co.jp
さてと、今日の部活ですが、今日も僕は午前中はいん秋葉原でした。
そろそろ一年生の中で「遅刻安定の人」というレッテルが張られそうで怖いです。
行くと、もう午後になっていました。副部長朝からのお勤めお疲れ様です。
まず、持ってきた棚の設置、置き場がなくて困ったけど・・・
そして次は・・・
次は・・・
しばしのゆるゆり!タイム。どうしてこうなった。
そしてその後、ちょっとだけロボットを改良しました。
なんかあまりに部室に人が多くて、部活する気が↓してしまったのですね(笑)
今日は何をしたかというと、先週の段階で、作った串除けがバンプでバキバキバキッ!っと悲鳴を上げていたので
既存のものを解雇にして、新しい材料で作り変えていました。ずいぶんゆるゆりな出来になったけどなぁ・・・
それで、それをバンプでテストしようと思ったのですが、知らないうちに副部長がまたロボットを作り直していて、
部屋のコースをテストで走らせていました。
と、いう訳で、その流れに乗って走らせてみました。
ライントレースのテストは一回もしていなかったのですが、思いのほかうまくいった。という感じでしょうか。
プログラム一部ミスってて、ギャップで明後日の方向に進軍していましたけど・・・(苦笑)
とりあえずそれを修正して・・・気が付いたらいつの間にか部活終了のお時間になっていました。
あれ?バンプテストしてない・・・?
やることいっぱいだったはずなのに、何もできなかった今日この頃でした。
副部長はやくバンパーつけろよー。
(^・ω・)ノ RadiumProduction in RoboCup Junior
サマーチャレンジの結果に応じて面白いことになるので期待しておいてください。
また、入賞できなかった子には反省文を書いて貰うことになったので頑張ってやってくださいということです。
あと例のプレゼンシートの電子媒体は此方にメールで提出お願いします。
toaru_sangi_no_rcj@yahoo.co.jp
さてと、今日の部活ですが、今日も僕は午前中はいん秋葉原でした。
そろそろ一年生の中で「遅刻安定の人」というレッテルが張られそうで怖いです。
行くと、もう午後になっていました。副部長朝からのお勤めお疲れ様です。
まず、持ってきた棚の設置、置き場がなくて困ったけど・・・
そして次は・・・
次は・・・
しばしのゆるゆり!タイム。どうしてこうなった。
そしてその後、ちょっとだけロボットを改良しました。
なんかあまりに部室に人が多くて、部活する気が↓してしまったのですね(笑)
今日は何をしたかというと、先週の段階で、作った串除けがバンプでバキバキバキッ!っと悲鳴を上げていたので
既存のものを解雇にして、新しい材料で作り変えていました。ずいぶんゆるゆりな出来になったけどなぁ・・・
それで、それをバンプでテストしようと思ったのですが、知らないうちに副部長がまたロボットを作り直していて、
部屋のコースをテストで走らせていました。
と、いう訳で、その流れに乗って走らせてみました。
ライントレースのテストは一回もしていなかったのですが、思いのほかうまくいった。という感じでしょうか。
プログラム一部ミスってて、ギャップで明後日の方向に進軍していましたけど・・・(苦笑)
とりあえずそれを修正して・・・気が付いたらいつの間にか部活終了のお時間になっていました。
あれ?バンプテストしてない・・・?
やることいっぱいだったはずなのに、何もできなかった今日この頃でした。
副部長はやくバンパーつけろよー。
(^・ω・)ノ RadiumProduction in RoboCup Junior
あと若干3ヶ月半。副部長のロボットがそこにあったはずなのに、今はもうNXTとモーターが転がっているだけ。
どういうことなの・・・(泣)
そして僕はといいますと、4月の終わりに使ったロボットがそのまま大会にでることになりそうです。
チームメイトはワンワンに出てるからね。とりあえずこっちはおあずけなんです。
という訳でロボットのメインはぼくがつくっているんですが・・結局原点帰り(笑)
因みに、今年はセンサーの数を例年より1桁少なくしてみることにしました。
加速度とか、コンパスとか、昨年と使っているセンサーはあまり変わらないのですが、
なぜか総数が半分くらいになっているような・・・
とりあえず今のところ、
ライトセンサ-3個
タッチセンサー2個
通電センサー1個
加速度センサー1個
コンパスセンサー1個
超音波センサー1個
で行こうかな・・・
とかいって結局増えるんですよね、例年のパターンだと(笑)
本当はライトセンサーは5個欲しいのですけど、ちょっと搭載する幅が足りない・・・
どうにかならないかなぁ。
(^・ω・)ノRadiumProduction in RoboCup Junior
どういうことなの・・・(泣)
そして僕はといいますと、4月の終わりに使ったロボットがそのまま大会にでることになりそうです。
チームメイトはワンワンに出てるからね。とりあえずこっちはおあずけなんです。
という訳でロボットのメインはぼくがつくっているんですが・・結局原点帰り(笑)
因みに、今年はセンサーの数を例年より1桁少なくしてみることにしました。
加速度とか、コンパスとか、昨年と使っているセンサーはあまり変わらないのですが、
なぜか総数が半分くらいになっているような・・・
とりあえず今のところ、
ライトセンサ-3個
タッチセンサー2個
通電センサー1個
加速度センサー1個
コンパスセンサー1個
超音波センサー1個
で行こうかな・・・
とかいって結局増えるんですよね、例年のパターンだと(笑)
本当はライトセンサーは5個欲しいのですけど、ちょっと搭載する幅が足りない・・・
どうにかならないかなぁ。
(^・ω・)ノRadiumProduction in RoboCup Junior
とりあえず、今日は被災者を助けるアームを作っていました。
去年は色々と吹っ切れた機構を使ってしまい、ライントレースに支障・・・というより死傷がでてしまったので
今回は・・・その・・・もうちょっと小型のものを使おうかな・・という雰囲気になっています。
まぁまだアームで行くかも確定ではないのですけど・・・
とりあえずいろいろ作ってみています。
そろそろやらないと時間的にも厳しいですからね。
それはそうと・・・サマーチャレンジにでるうちの高専生・・・
未だに何もやってないんだなぁこれが(笑)
若干一名ロボットを作り始めてはいるのですが、全体的に間に合わないだろ(笑)
さて、みんなどうするつもりなのでしょう。
やっぱりテコ入れいるかなぁ・・・。
そうそう、副部長が今年はPICで出るそうです♫(本人談)
(^・ω・)ノRadiumProduction in RoboCupJunior
去年は色々と吹っ切れた機構を使ってしまい、ライントレースに支障・・・というより死傷がでてしまったので
今回は・・・その・・・もうちょっと小型のものを使おうかな・・という雰囲気になっています。
まぁまだアームで行くかも確定ではないのですけど・・・
とりあえずいろいろ作ってみています。
そろそろやらないと時間的にも厳しいですからね。
それはそうと・・・サマーチャレンジにでるうちの高専生・・・
未だに何もやってないんだなぁこれが(笑)
若干一名ロボットを作り始めてはいるのですが、全体的に間に合わないだろ(笑)
さて、みんなどうするつもりなのでしょう。
やっぱりテコ入れいるかなぁ・・・。
そうそう、副部長が今年はPICで出るそうです♫(本人談)
(^・ω・)ノRadiumProduction in RoboCupJunior
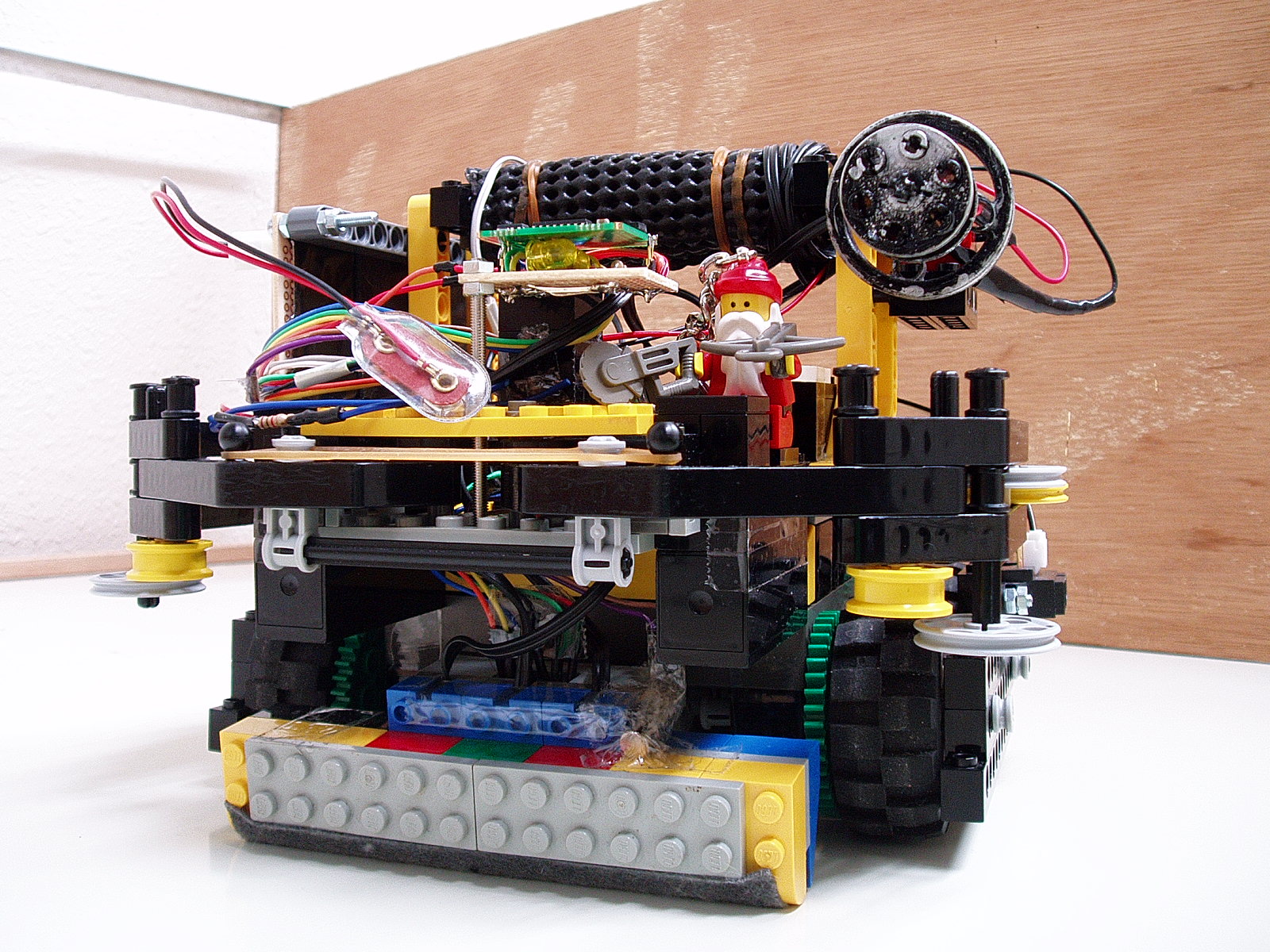
最近思うんですよね。
「これのどこがレスキューロボット」って?
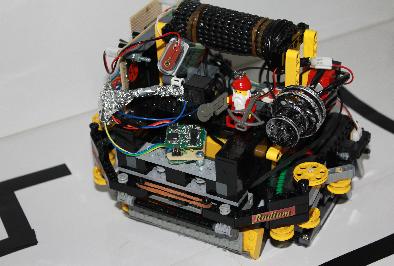
このロボット、どっからみてもわからない・・・
レスキュー要素ってどこにあるんでしょうかね?でもこのロボットでレスキュー競技ができたんですよね・・・
レスキューなのに荒地を走るようにできてないし、そもそも人助けられないし、踏みつけるだけだし・・・
今のロボットはちゃんと被災者をつかむ機構がある・・・あるはあるのですが・・・
こんな感じ。
やっぱりレスキューとは程遠いような・・・。
なんか僕のイメージではレスキューロボットって・・・こう・・・瓦礫の中でもガタガタ移動できて
なんか・・・前後にタイヤヤクロークつきのアームとかついてて、変形しながら瓦礫の中を動き回るもののような・・・。
恐らく世間一般的にロボカップジュニアのレスキューロボットってレスキューロボットとして認識されませんよね?
なんかそれが気になったので、この前、
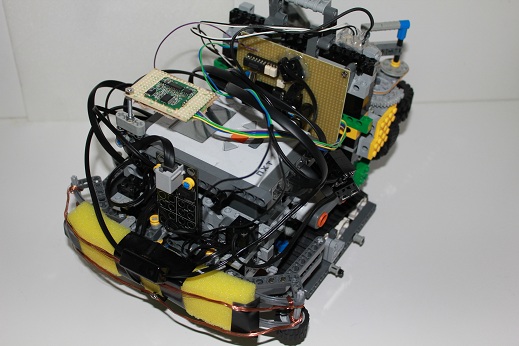
世間一般的にレスキューロボットとして認識されるようなレスキューロボットを作ってみようと思ったのですけど・・・
その結果がこれだよ・・・
一応なんか後ろだけでも可動するのですが、
正直言って企画倒れ感が否めない・・・(苦笑)
結局レスキューロボットに見えるレスキューロボットはできませんでした。
そもそもコイツ、被災者思いっきり床に叩きつけていましたからね・・・。レスキュー?殺人の間違いじゃ・・・
それでなのですが、今度こそ、レスキューロボットに見えるレスキューロボットを作りたいと思っているのですね。
いや、勿論、LEGOでですよ?自作で作っちゃったら(形だけなら)結構あっさりできてしまいましたから・・・
まぁそれには色々問題があって、まず、アームを使うとなると、
どうやって3つのモーターで通常の移動と前後のアームを制御しようかな・・・というところに問題がでてきます(笑)
やっぱりNXT2台積みかなぁ。うわぁ死ねる(笑)
なんて感じのことを今計画しています。夏中に作れるといいなー。なんて感じで頑張ろうとしています。
という訳で今日はこの辺で。
今日は期末試験解析と英語と情報でした。明日は物理と政経だーorz
(^・ω・)ノ RadiumProduction in RoboCup Junior
「これのどこがレスキューロボット」って?
このロボット、どっからみてもわからない・・・
レスキュー要素ってどこにあるんでしょうかね?でもこのロボットでレスキュー競技ができたんですよね・・・
レスキューなのに荒地を走るようにできてないし、そもそも人助けられないし、踏みつけるだけだし・・・
今のロボットはちゃんと被災者をつかむ機構がある・・・あるはあるのですが・・・
こんな感じ。
やっぱりレスキューとは程遠いような・・・。
なんか僕のイメージではレスキューロボットって・・・こう・・・瓦礫の中でもガタガタ移動できて
なんか・・・前後にタイヤヤクロークつきのアームとかついてて、変形しながら瓦礫の中を動き回るもののような・・・。
恐らく世間一般的にロボカップジュニアのレスキューロボットってレスキューロボットとして認識されませんよね?
なんかそれが気になったので、この前、
世間一般的にレスキューロボットとして認識されるようなレスキューロボットを作ってみようと思ったのですけど・・・
その結果がこれだよ・・・
一応なんか後ろだけでも可動するのですが、
正直言って企画倒れ感が否めない・・・(苦笑)
結局レスキューロボットに見えるレスキューロボットはできませんでした。
そもそもコイツ、被災者思いっきり床に叩きつけていましたからね・・・。レスキュー?殺人の間違いじゃ・・・
それでなのですが、今度こそ、レスキューロボットに見えるレスキューロボットを作りたいと思っているのですね。
いや、勿論、LEGOでですよ?自作で作っちゃったら(形だけなら)結構あっさりできてしまいましたから・・・
まぁそれには色々問題があって、まず、アームを使うとなると、
どうやって3つのモーターで通常の移動と前後のアームを制御しようかな・・・というところに問題がでてきます(笑)
やっぱりNXT2台積みかなぁ。うわぁ死ねる(笑)
なんて感じのことを今計画しています。夏中に作れるといいなー。なんて感じで頑張ろうとしています。
という訳で今日はこの辺で。
今日は期末試験解析と英語と情報でした。明日は物理と政経だーorz
(^・ω・)ノ RadiumProduction in RoboCup Junior
今年のロボットどうしよう・・・。まだセンサーの数すら決めてないんですよね。
ライトセンサー、3個にしようか4個にしようか。
4個の方がライントレースはやりやすいけど、場所とるしなぁ・・・。
とりあえず現段階で、決まっていることは、
1、加速度センサーを使ってみる。
2、コンパスセンサーを使ってみる。
3、リレーは使わない。
まぁわざわざ毎年ロボット変えているから勝てないんですけどね。NXTの基本形を作ったことがないもんで(笑)
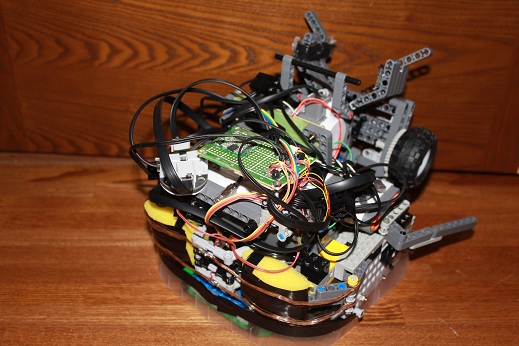
逆にRCXで作っちゃうと、何をやってもRadiumの機体に収束しちゃうんですよ。
こんなの↑
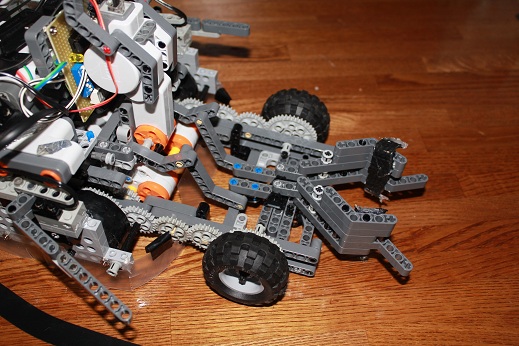
まぁ一部例外はありますが。
例外↓
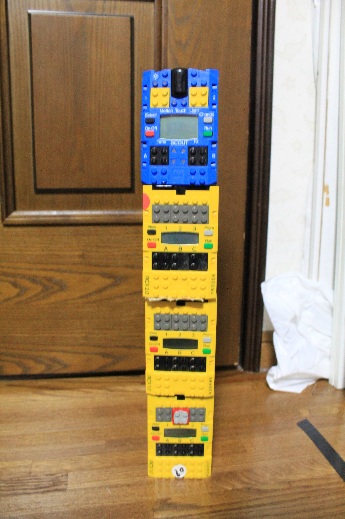


でも、NXTだと作るたびに全然違ったロボットになります。これでもかってぐらいにですね。
しかもどれも馬鹿でっかいロボットばっかり。大会でもあっちこっちの壁やゲートに衝突していました。
関東なんか―30点の原因は9割以上それですからね。酷いったらありゃしない。
なので小さいロボットを作りたいのですが、なかなかうまくいきませんね。
やっぱり大きくなっちゃうものなのかなぁ。まず何をがんばってもRadiumの機体より小さくなる気がしませんし。
あれも22cmの時はギリギリだったんだけどなぁ。おかしいなぁ。
NXTを立ててもいいのですが、ちょっと見栄えが残念な子になった経験がありますので・・・
只でさえ残念なものしか作りませんから(笑)
という訳で今年はロボット頑張るぞー。
それではまた。
(^・ω・)ノRadiumProduction in RoboCupJunior
ライトセンサー、3個にしようか4個にしようか。
4個の方がライントレースはやりやすいけど、場所とるしなぁ・・・。
とりあえず現段階で、決まっていることは、
1、加速度センサーを使ってみる。
2、コンパスセンサーを使ってみる。
3、リレーは使わない。
まぁわざわざ毎年ロボット変えているから勝てないんですけどね。NXTの基本形を作ったことがないもんで(笑)
逆にRCXで作っちゃうと、何をやってもRadiumの機体に収束しちゃうんですよ。
こんなの↑
まぁ一部例外はありますが。
例外↓
でも、NXTだと作るたびに全然違ったロボットになります。これでもかってぐらいにですね。
しかもどれも馬鹿でっかいロボットばっかり。大会でもあっちこっちの壁やゲートに衝突していました。
関東なんか―30点の原因は9割以上それですからね。酷いったらありゃしない。
なので小さいロボットを作りたいのですが、なかなかうまくいきませんね。
やっぱり大きくなっちゃうものなのかなぁ。まず何をがんばってもRadiumの機体より小さくなる気がしませんし。
あれも22cmの時はギリギリだったんだけどなぁ。おかしいなぁ。
NXTを立ててもいいのですが、ちょっと見栄えが残念な子になった経験がありますので・・・
只でさえ残念なものしか作りませんから(笑)
という訳で今年はロボット頑張るぞー。
それではまた。
(^・ω・)ノRadiumProduction in RoboCupJunior
サッカー女子W杯をみて今日も徹夜です。
なでしこJAPAN優勝だぁ!
それにしても最近、どうにもライントレースができません。
ラインの上にロボットを乗せると、新しい道を開拓していく惨状です。
使ってるロボットが悪いんだろーか。悪いんだろーな。
ちゃんとしたロボット作ろうよ、自分。
まぁなんというか、2足歩行でレスキューとかしようとした結果ですね。
バンプでこけるのはもう仕方がないと、半分あきらめています。
うん。この案却下(笑)
今度はちゃんとしたロボット作ります。
それでは
(^・ω・)ノRadiumProduction in RoboCupJunior
なでしこJAPAN優勝だぁ!
それにしても最近、どうにもライントレースができません。
ラインの上にロボットを乗せると、新しい道を開拓していく惨状です。
使ってるロボットが悪いんだろーか。悪いんだろーな。
ちゃんとしたロボット作ろうよ、自分。
まぁなんというか、2足歩行でレスキューとかしようとした結果ですね。
バンプでこけるのはもう仕方がないと、半分あきらめています。
うん。この案却下(笑)
今度はちゃんとしたロボット作ります。
それでは
(^・ω・)ノRadiumProduction in RoboCupJunior
なんか、できました。
今日もロボカップ部は平和です。
とりあえず今日もカオスですが、とりあえずロボットの作成とNQCのインストールは行いました。
昨日よりも時間がかからなかったなぁ。あ、8限終了の鐘だ。
今は某数学教師の話をしています(笑)
とりあえず、今RCXとかの説明を一年生にしろと副部長に要求されているのでしようかな。
でも昨日ロボットの作成で終わったので、今日もそれに合わせて終わろうかな・・・
まぁ簡潔にLEGOの説明して終わります。
それじゃ説明してきます。
それではー。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日もロボカップ部は平和です。
とりあえず今日もカオスですが、とりあえずロボットの作成とNQCのインストールは行いました。
昨日よりも時間がかからなかったなぁ。あ、8限終了の鐘だ。
今は某数学教師の話をしています(笑)
とりあえず、今RCXとかの説明を一年生にしろと副部長に要求されているのでしようかな。
でも昨日ロボットの作成で終わったので、今日もそれに合わせて終わろうかな・・・
まぁ簡潔にLEGOの説明して終わります。
それじゃ説明してきます。
それではー。
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ