RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
今日の記事はもう紹介していそうで、まだ紹介をしたことがないNXTのコンパスセンサーについてです。
写真は今までにも何回か出していますので、(しかも他のと同じだし・・・)大丈夫かとは思いますが、
一応紹介するとこんな感じです。

・・・
見分けるときには裏を見ましょう。それだけです。
このセンサー。何ができるかといいますと、ご存じのとおり、センサーが向いている方位を知ることができます。
確か、見ているのは黒い方の方向だったような気がしますが、よく覚えていません(笑)方向に関しての記載ないし・・・
分解能は360、つまり1°ずつ読み取ることができます。設定によって2°単位にすることもできますが、
ロボカップジュニアで使う上では、わざわざ荒くする必要もないでしょう。
センサーの値を読み取りたい時は、ROBOLABの場合はプログラムを実行さえすれば画面に表示されますよね。
(実はあれのせいでプログラムの進行が異様に遅くなってたり・・・)
でも、実はそんなことしなくても、NXTのviewの

UltraSonicSensorのcmを選択して、
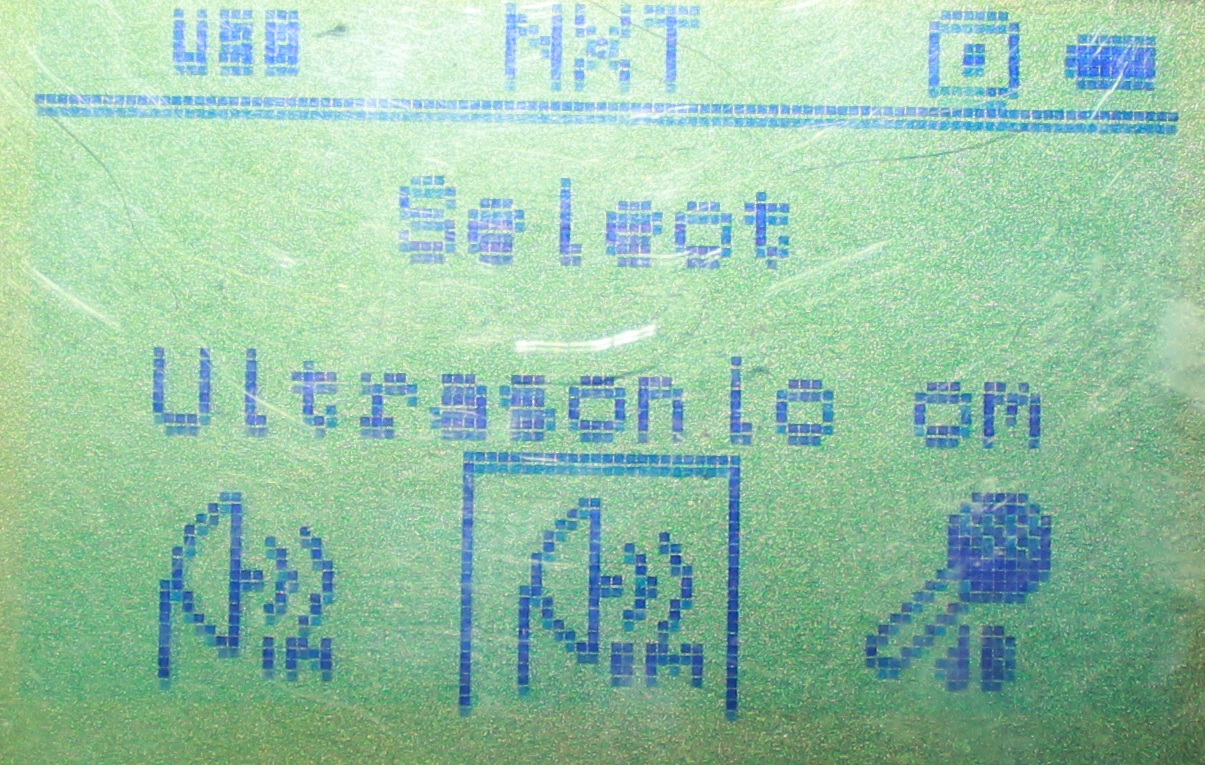
ポートをコンパスセンサーがついているものにすると・・・!
この通り、0から180までの値が返ってきます。
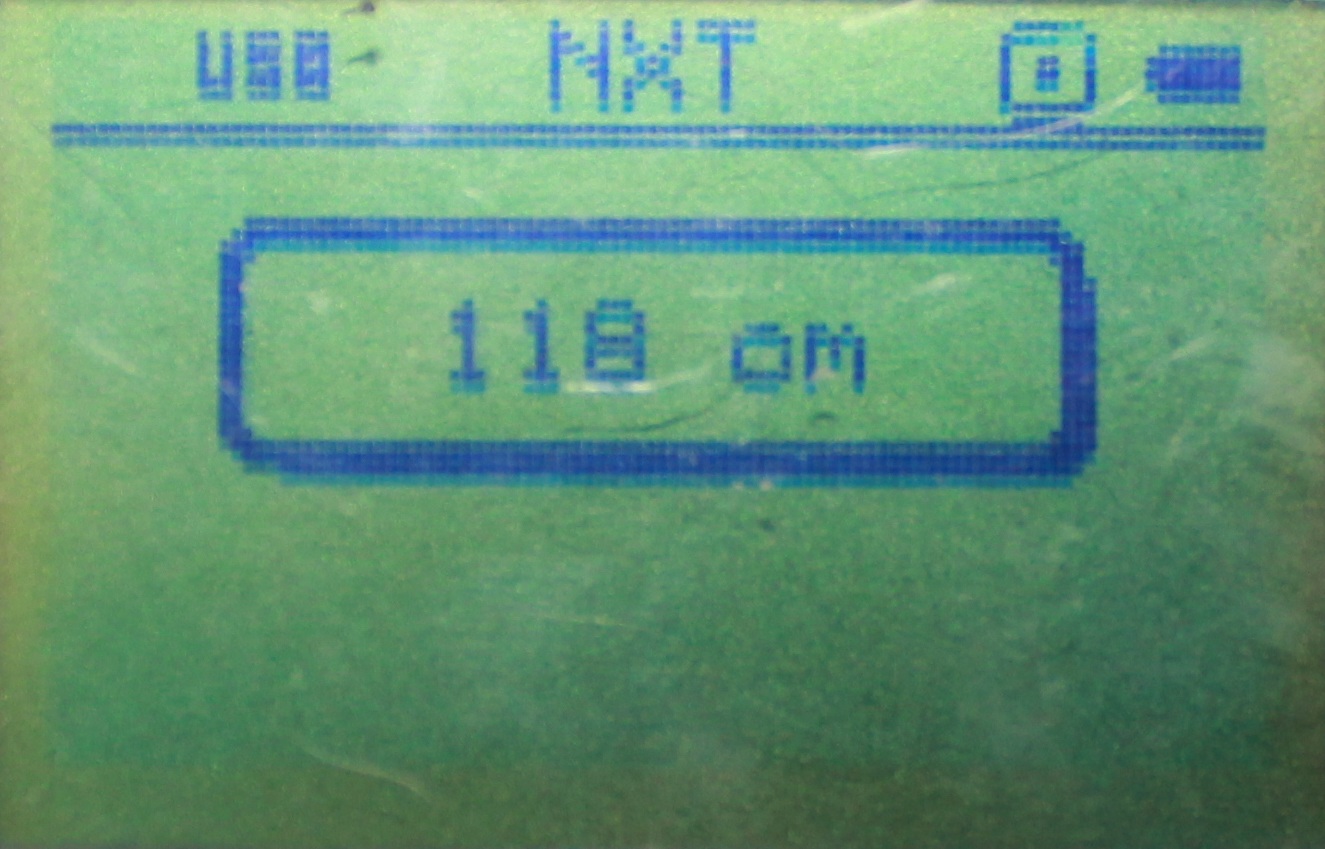
この値を2倍してやれば方位センサーの値になります。
要するにここでは分解能180、2度単位で値が返ってくるわけです。
因みになんでInchではダメかといいますと、もともと超音波センサーはcm単位で値を返していて、
それをわざわざNXTでinch換算して表示しているのです。
なのでinchの方で値を出そうとすると1inch=2.54㎝
∴でてきた値を2.54×2=5.08倍しないとコンパスの値にならないのです。
これはめんどくさい・・・
という訳で㎝を使いましょう。ということです。
あ、2.54っていう数字は回路ではよくでてくるので覚えておいて下さい(笑)
そんなコンパスセンサーですが、コンパスというものは方位磁石と同じで、地球の磁場を利用して測定されています。
まぁこれを地磁気というのですが、結局磁場を測定していうるので近くに磁場を作るものがあると、
その磁場に影響されて測定ができないんです。
磁場を作る物といえば、これは中学物理で習うように、簡単に言うと磁石と電流です。
つまりこのふたつがたくさんあると、方位センサーはバグります。
特に電磁石とかは最悪です。確実に死にます。後モーターとかも・・・
これは、これらのものに使われている「コイル」という素子が影響しているのですが、
この話をするとブログのジャンルが「電磁気」になってしまうので割愛します。
あとまずいのが床下の電気配線。専門用語で床隠蔽配線といいますが、これも痛いです。
それと、電子レンジ。ダメ、絶対。
という訳でこれらに注意して方位センサーは使ってください。
まぁ実は磁場というのは強磁性体というものを使うと、遮蔽することができなくもないので、
興味のある方は調べてみてください。今年の僕のロボットは実は遮蔽していました(笑)
でも!実はこのNXTの方位センサーには外部磁場を検知してそれに合わせて方位の値を調整するモードが存在します。
これを使えば磁場が強くても大丈夫・・・・というほどのものでもありませんが、
まぁこれをすれば幾分マシにはなるでしょう。ROBOLABの場合はデフォルトでこのモードになっているとかいないとか。
まぁそんな感じで今回の記事は終了です。
このコンパスセンサー、結構調べてはいるのですが、未だにわからないところが多いんですよね。これ本当にI2C?
超音波センサーと並んでNXTの7不思議のふたつ目ですね。あと5つどこにあるんだよ・・・あ、一個はNXT-Gか。
それではまたー。
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCupJunior
写真は今までにも何回か出していますので、(しかも他のと同じだし・・・)大丈夫かとは思いますが、
一応紹介するとこんな感じです。
・・・
見分けるときには裏を見ましょう。それだけです。
このセンサー。何ができるかといいますと、ご存じのとおり、センサーが向いている方位を知ることができます。
確か、見ているのは黒い方の方向だったような気がしますが、よく覚えていません(笑)方向に関しての記載ないし・・・
分解能は360、つまり1°ずつ読み取ることができます。設定によって2°単位にすることもできますが、
ロボカップジュニアで使う上では、わざわざ荒くする必要もないでしょう。
センサーの値を読み取りたい時は、ROBOLABの場合はプログラムを実行さえすれば画面に表示されますよね。
(実はあれのせいでプログラムの進行が異様に遅くなってたり・・・)
でも、実はそんなことしなくても、NXTのviewの
UltraSonicSensorのcmを選択して、
ポートをコンパスセンサーがついているものにすると・・・!
この通り、0から180までの値が返ってきます。
この値を2倍してやれば方位センサーの値になります。
要するにここでは分解能180、2度単位で値が返ってくるわけです。
因みになんでInchではダメかといいますと、もともと超音波センサーはcm単位で値を返していて、
それをわざわざNXTでinch換算して表示しているのです。
なのでinchの方で値を出そうとすると1inch=2.54㎝
∴でてきた値を2.54×2=5.08倍しないとコンパスの値にならないのです。
これはめんどくさい・・・
という訳で㎝を使いましょう。ということです。
あ、2.54っていう数字は回路ではよくでてくるので覚えておいて下さい(笑)
そんなコンパスセンサーですが、コンパスというものは方位磁石と同じで、地球の磁場を利用して測定されています。
まぁこれを地磁気というのですが、結局磁場を測定していうるので近くに磁場を作るものがあると、
その磁場に影響されて測定ができないんです。
磁場を作る物といえば、これは中学物理で習うように、簡単に言うと磁石と電流です。
つまりこのふたつがたくさんあると、方位センサーはバグります。
特に電磁石とかは最悪です。確実に死にます。後モーターとかも・・・
これは、これらのものに使われている「コイル」という素子が影響しているのですが、
この話をするとブログのジャンルが「電磁気」になってしまうので割愛します。
あとまずいのが床下の電気配線。専門用語で床隠蔽配線といいますが、これも痛いです。
それと、電子レンジ。ダメ、絶対。
という訳でこれらに注意して方位センサーは使ってください。
まぁ実は磁場というのは強磁性体というものを使うと、遮蔽することができなくもないので、
興味のある方は調べてみてください。今年の僕のロボットは実は遮蔽していました(笑)
でも!実はこのNXTの方位センサーには外部磁場を検知してそれに合わせて方位の値を調整するモードが存在します。
これを使えば磁場が強くても大丈夫・・・・というほどのものでもありませんが、
まぁこれをすれば幾分マシにはなるでしょう。ROBOLABの場合はデフォルトでこのモードになっているとかいないとか。
まぁそんな感じで今回の記事は終了です。
このコンパスセンサー、結構調べてはいるのですが、未だにわからないところが多いんですよね。これ本当にI2C?
超音波センサーと並んでNXTの7不思議のふたつ目ですね。あと5つどこにあるんだよ・・・あ、一個はNXT-Gか。
それではまたー。
過去に紹介したLEGOセンサー↓
・NXTライトセンサー
・NXT3次元加速度センサー
・NXTタッチセンサー
・NXT超音波センサー
・RCXタッチセンサー
・NXT音センサー
・RCXライトセンサー
・バーニアNXTセンサアダプタV46
・RCX温度センサー
・NXT EOPDセンサー
・NXT IRLink
・NXT IRSeekerV2
・RCX角度センサー
・NXT角度センサー
・NXTコンパスセンサー
・NXT磁気センサー
・NXTジャイロセンサー
・NXT慣性センサー
・NXT RFIDセンサー
(^・ω・)ノRadiumProduction in RoboCupJunior
今日、とりあえずNBCに触れてみたのですが、
なんだ・・・こりゃ・・・
只、モーターAを回転させようと思っただけなのに・・・
気が付いたらこんな長いプログラムが(笑)
・・・この先が不安すぎます><。
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s:どうやら普通にOnFwd(OUT_A,100);でも動くっぽいです(笑)
なんだ・・・こりゃ・・・
#include "NXTDefs.h"
dseg segment
UF byte
pwr sbyte
OM byte OUT_MODE_MOTORON+OUT_MODE_BRAKE
RM byte OUT_REGMODE_IDLE
RS byte OUT_RUNSTATE_RUNNING
dseg ends
thread main
set UF, UF_UPDATE_MODE
setout OUT_A, OutputMode, OM, RegMode, RM, RunState, RS, UpdateFlags, UF
endless:
set pwr, 100
UpdateSpeed:
set UF, UF_UPDATE_SPEED+UF_UPDATE_MODE
setout OUT_A, Power, pwr, OutputMode, OM, UpdateFlags, UF
jmp endless
exit
endt
只、モーターAを回転させようと思っただけなのに・・・
気が付いたらこんな長いプログラムが(笑)
・・・この先が不安すぎます><。
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s:どうやら普通にOnFwd(OUT_A,100);でも動くっぽいです(笑)
さてと。久しぶりのcircuit カテゴリーの記事です。今日の記事は以前予告したように、
「回路図」についてのお話となります。
まず、回路図ってなんでしょうか。
簡単に言うと名前の通り、回路の図。つまりその回路がどういう構成になっているかを表した図ということです。
まぁこれだけなんですが、
例えば機械の設計図でも、部品一つ一つの設計図と全体の組立図のふたつがあって、
それでようやくひとつの「設計図」になるのと同じように、
回路図でも、大きく分けてふたつの図があります。
そのひとつが配線図。
これはどの回路素子がどのように他と接続されているかを示した図です。
まぁ要するに配線方法を図に示したものですね。
もうひとつがパターン図。
これは実際に基盤上で素子を接続するときの図で
この図の通りにはんだ付け等をすることになります。
あ。基盤ってのはこれのことです。これの上に素子とかおいて回路造りますよー。

ところで、なんでふたつも図がいるんでしょう。
結局パターン図だけでも配線の方法がわかるんだからパターン図だけでいいじゃない。と思いませんか?
その理由は簡単です。
まずはこれ、パターン図です。
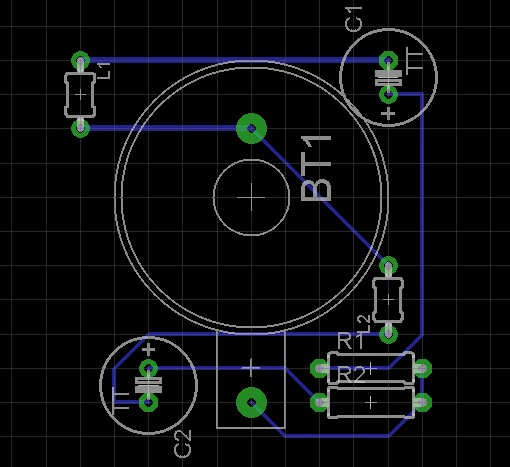
これだけ見て、すぐに何が何に繋がっていてどういう回路なのか。なんてわかります?
ちょっと難しいですよね。配線を目で追っていかないと恐らく無理でしょう。
ところがこの回路の配線図。これを見ますと・・・
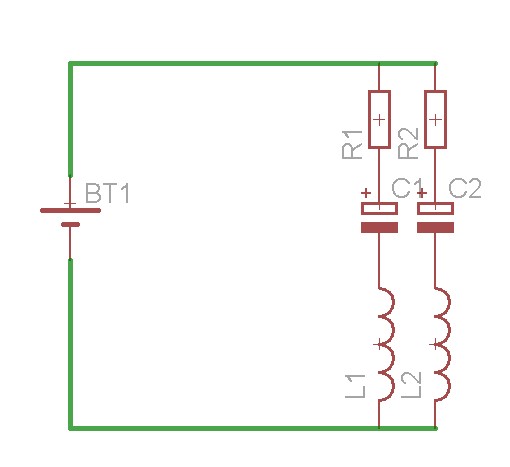
スッキリ。わかりやすいですよね。
これが理由です。配線図の方が圧倒的にパターン図より見やすいので、作る回路の構成を考えるときに楽なんです。
要するに回路図を作る際は混乱しないために
とりあえず、何を何につなぐかということをこの配線図で決めて、
そのあとで実際に素子をどういう風に配置するかをパターン図で決めるんです。
まぁこれが回路図の作り方です。
それで、ここで大事なのが、パターン図の場合は実際に素子を配置するのをPC上でやるものなので、
抵抗はちゃんと実際の抵抗の形を、コンデンサはちゃんとコンデンサの形を使って配置をします。
まぁ要するに素子を上から見た形がPC上にデータそして入っていてその形を使って配線をするわけです。
でも配線図だとこれでは見にくいので、素子そのものを記号に置き換えて配線しています。
なので、配線図を作ったり、読んだりする際にはこの記号がわかってないといけません。よね?
だから回路を作る時はこの記号(回路図記号)を覚えないと大変なのです。
例えば、電池はコレ
抵抗だったらコレ
コンデンサならコレ
といった感じで決まっています。
まぁ未だに、僕も読めないものもたまにでてきたりしますけど、
普段使うものって結構限られているのですぐに覚えられますよ♪
これからの素子の紹介ではこの回路図記号も合わせて紹介するので、
その時にでも確認すれば大丈夫・・・かな?
あ。抵抗の旧記号はこんな感じ。
ギザギザで書きにくいから新しいのになったっていう噂があります(笑)
それでは今日はこの辺で。またこのカテゴリーは素子編が続きます。
(^・ω・)ノRadiumProduction in RoboCupJunior
「回路図」についてのお話となります。
まず、回路図ってなんでしょうか。
簡単に言うと名前の通り、回路の図。つまりその回路がどういう構成になっているかを表した図ということです。
まぁこれだけなんですが、
例えば機械の設計図でも、部品一つ一つの設計図と全体の組立図のふたつがあって、
それでようやくひとつの「設計図」になるのと同じように、
回路図でも、大きく分けてふたつの図があります。
そのひとつが配線図。
これはどの回路素子がどのように他と接続されているかを示した図です。
まぁ要するに配線方法を図に示したものですね。
もうひとつがパターン図。
これは実際に基盤上で素子を接続するときの図で
この図の通りにはんだ付け等をすることになります。
あ。基盤ってのはこれのことです。これの上に素子とかおいて回路造りますよー。
ところで、なんでふたつも図がいるんでしょう。
結局パターン図だけでも配線の方法がわかるんだからパターン図だけでいいじゃない。と思いませんか?
その理由は簡単です。
まずはこれ、パターン図です。
これだけ見て、すぐに何が何に繋がっていてどういう回路なのか。なんてわかります?
ちょっと難しいですよね。配線を目で追っていかないと恐らく無理でしょう。
ところがこの回路の配線図。これを見ますと・・・
スッキリ。わかりやすいですよね。
これが理由です。配線図の方が圧倒的にパターン図より見やすいので、作る回路の構成を考えるときに楽なんです。
要するに回路図を作る際は混乱しないために
とりあえず、何を何につなぐかということをこの配線図で決めて、
そのあとで実際に素子をどういう風に配置するかをパターン図で決めるんです。
まぁこれが回路図の作り方です。
それで、ここで大事なのが、パターン図の場合は実際に素子を配置するのをPC上でやるものなので、
抵抗はちゃんと実際の抵抗の形を、コンデンサはちゃんとコンデンサの形を使って配置をします。
まぁ要するに素子を上から見た形がPC上にデータそして入っていてその形を使って配線をするわけです。
でも配線図だとこれでは見にくいので、素子そのものを記号に置き換えて配線しています。
なので、配線図を作ったり、読んだりする際にはこの記号がわかってないといけません。よね?
だから回路を作る時はこの記号(回路図記号)を覚えないと大変なのです。
例えば、電池はコレ
抵抗だったらコレ
コンデンサならコレ
といった感じで決まっています。
まぁ未だに、僕も読めないものもたまにでてきたりしますけど、
普段使うものって結構限られているのですぐに覚えられますよ♪
これからの素子の紹介ではこの回路図記号も合わせて紹介するので、
その時にでも確認すれば大丈夫・・・かな?
あ。抵抗の旧記号はこんな感じ。
ギザギザで書きにくいから新しいのになったっていう噂があります(笑)
それでは今日はこの辺で。またこのカテゴリーは素子編が続きます。
(^・ω・)ノRadiumProduction in RoboCupJunior
昔昔、あるところに・・・
NXTの新型バッテリーに関しての記事がありました。
その記事には、こう書かれていました。
「NXTの新型バッテリーが出ました。様子を見て、今度買ってみようかな・・・」
あの記事以来まったく何も話していないのですが、実は今回の大会で、
この新型バッテリーを使用していました。

昨年度の最後の予算で顧問の先生に買って頂きました(笑)
それでこの新型のバッテリー、なんで買ったかといいますと」、
回路を外付けしたので「極度の電流不足になってしまったから」なのです。
というのも、旧型のバッテリーが1400mA/hなのに対し、新型は2100mA/hなので約1.5倍、相当違います。
まぁそれが理由で今回のロボットはこの新型バッテリーを採用しました。
ところで、この新型と灰色の旧型、一体何が違うのでしょう。
まぁ充電の方式とか、中のセルに違いがあるのですが、とろあえずここでは物としての性能の違いではなく
結果として「何が違うのか」を紹介します。
まず当然電流量が違うからモーターの速度は当然変わるだろう。と思いますよね。
実は、これは変わりません。NXT自体がモーターに送れる電流量の上限をセットしているみたいです。
そんでもって充電時間。
どうにもこれも変わらないようです。うん、どっちも3時間だね。
じゃあ結局何が違うのか。
それは、一回の充電でもつ電池の時間と電池そのものの寿命です。
まぁまぁ要するに長持ちするようになったんですね。当社比1.5倍なんだとか。
んでなんで電池が長持ちするだけでなく、電池の寿命も延びたのか。という話ですが、
まずその前に充電池の寿命の話をチョットしましょう。
電池の寿命といえば、電池が使えなくなる状態を指しますよね。
これは充電池の場合、充電ができなくなる状態を指します。
なんで寿命が縮む=充電できる量が少なくなる。と考えれば大丈夫かと思います。
ちょっと前の時代に充電池としてよく使われていたNiCd(ニッケルカドニウム:通常ニカド)電池とかだと
継ぎ足し充電をすればするほど寿命は縮みます。
今でも”えねるーぷ”等に使用されているNiMH(ニッケル水素:通称日水)電池とかだと
充電後に長時間放置したり(これを自由放電といいます)、
過充電(充電のしすぎ)や完全放電(完全に電池を使い切る)と寿命は減っていきます。
この継ぎ足し充電や自由放電で寿命が縮むことをバッテリーの「メモリー効果」とか言ったりします。
じゃあこのNXTの充電池に使われているLipo(Lithium ion polymer:通称リポ)電池はどうかというと、
まず、完全放電で100%死にます。これは絶対禁止です。
でもメモリー効果は起こしません。よってこれらの行為で寿命が縮むことはありません。
でもその代り、温度の上昇にむっちゃ弱いです。
充電中に電池の温度が上がったりすると、寿命が縮みます。
まぁ充電すればどんな電池でも多少の発熱はありますから、
そういう意味では充電すればするほど寿命は消えていきますね。
それでも他の充電池よりははるかに寿命は長いですけど。
そんでもってなんでNXTの新型電池は旧型電池より寿命が長いかというと・・・もうわかりますね。
充電時の発熱が圧倒的に少ないからです。
という訳で長持ちする。という訳です。
因みにリポは一歩間違うとこうなるので注意してください
まぁ今回はそんな感じで電池の話でした。
最後に充電できる電池を二次電池、充電できない乾電池などを一次電池と呼ぶんですなんて豆知識を加えてみたり。
それではー
(^・ω・)ノRadiumProduction in RoboCupJunior
NXTの新型バッテリーに関しての記事がありました。
その記事には、こう書かれていました。
「NXTの新型バッテリーが出ました。様子を見て、今度買ってみようかな・・・」
あの記事以来まったく何も話していないのですが、実は今回の大会で、
この新型バッテリーを使用していました。
昨年度の最後の予算で顧問の先生に買って頂きました(笑)
それでこの新型のバッテリー、なんで買ったかといいますと」、
回路を外付けしたので「極度の電流不足になってしまったから」なのです。
というのも、旧型のバッテリーが1400mA/hなのに対し、新型は2100mA/hなので約1.5倍、相当違います。
まぁそれが理由で今回のロボットはこの新型バッテリーを採用しました。
ところで、この新型と灰色の旧型、一体何が違うのでしょう。
まぁ充電の方式とか、中のセルに違いがあるのですが、とろあえずここでは物としての性能の違いではなく
結果として「何が違うのか」を紹介します。
まず当然電流量が違うからモーターの速度は当然変わるだろう。と思いますよね。
実は、これは変わりません。NXT自体がモーターに送れる電流量の上限をセットしているみたいです。
そんでもって充電時間。
どうにもこれも変わらないようです。うん、どっちも3時間だね。
じゃあ結局何が違うのか。
それは、一回の充電でもつ電池の時間と電池そのものの寿命です。
まぁまぁ要するに長持ちするようになったんですね。当社比1.5倍なんだとか。
んでなんで電池が長持ちするだけでなく、電池の寿命も延びたのか。という話ですが、
まずその前に充電池の寿命の話をチョットしましょう。
電池の寿命といえば、電池が使えなくなる状態を指しますよね。
これは充電池の場合、充電ができなくなる状態を指します。
なんで寿命が縮む=充電できる量が少なくなる。と考えれば大丈夫かと思います。
ちょっと前の時代に充電池としてよく使われていたNiCd(ニッケルカドニウム:通常ニカド)電池とかだと
継ぎ足し充電をすればするほど寿命は縮みます。
今でも”えねるーぷ”等に使用されているNiMH(ニッケル水素:通称日水)電池とかだと
充電後に長時間放置したり(これを自由放電といいます)、
過充電(充電のしすぎ)や完全放電(完全に電池を使い切る)と寿命は減っていきます。
この継ぎ足し充電や自由放電で寿命が縮むことをバッテリーの「メモリー効果」とか言ったりします。
じゃあこのNXTの充電池に使われているLipo(Lithium ion polymer:通称リポ)電池はどうかというと、
まず、完全放電で100%死にます。これは絶対禁止です。
でもメモリー効果は起こしません。よってこれらの行為で寿命が縮むことはありません。
でもその代り、温度の上昇にむっちゃ弱いです。
充電中に電池の温度が上がったりすると、寿命が縮みます。
まぁ充電すればどんな電池でも多少の発熱はありますから、
そういう意味では充電すればするほど寿命は消えていきますね。
それでも他の充電池よりははるかに寿命は長いですけど。
そんでもってなんでNXTの新型電池は旧型電池より寿命が長いかというと・・・もうわかりますね。
充電時の発熱が圧倒的に少ないからです。
という訳で長持ちする。という訳です。
因みにリポは一歩間違うとこうなるので注意してください
まぁ今回はそんな感じで電池の話でした。
最後に充電できる電池を二次電池、充電できない乾電池などを一次電池と呼ぶんですなんて豆知識を加えてみたり。
それではー
(^・ω・)ノRadiumProduction in RoboCupJunior
まだまだここからです。とりあえず一年生には今まで通り、メール作戦を継続して貰い、
此方はは上級生らしく(?)上から狙い打ってみることにしました。
といっても一年生の担任の先生方に直接
「ロボカップ(やロボット)に興味ありそうな子いますかね?」と聞いて回るだけですけど。
まぁこれだけでも結構効果ありますね。それだけでなく、今年度の一年生の傾向とかがわかって面白いです。
この聞き込みで分かったことはふたつ。
・200クラスに一人、うちにきたいと言っている子がいる。
・今年の一年生は例年以上にビラ配りに敏感。
という訳で、その来たいと言っている子には月曜日の放課後にならうちにきてくれれば・・・等ということを
担任の先生が伝えてくれると仰ってくれたので、部室に来るのを待ち、
そしてビラでも作ろうかと、いうことになりました。
まぁA5サイズということなので簡潔に、部の紹介と部室の場所だけ。
やっぱり場所がわからないらしく、来たくてもこれない人が結構いるんだとか。
とりあえず最低でもあと3人は確保しないといけないのでなんとかして頑張らないとー。
因みに今入部している(?)一年生は3人、きたいと言っているのが2人。
ルール変更により後増やさなきゃいけない人数が3人。
という訳で一年生は8人になる見込みです。
え?8人?あっ多い(笑)
まぁ今入部している3人は、既にロボカップ経験が豊富なので、新入生としてはカウントしてませんが・・・
それでもあと5人をどっかに収めなきゃいけなんですね。おぅわ大変だ(笑)
という訳で岸壁で鵜飼をしていたのが、大海原に出て海釣りをすることになりました。
まぁその方が入る確率高いですからいいですよね。
さて、そんな感じで今日は部内情勢を書いて終了かな。
明日アタリ回路カテゴリーが暴れ始めます。
それでは・・・
あれ?8人ってロボコンより多い!
(^・ω・)ノRadiumProduction in RoboCupJunior
此方はは上級生らしく(?)上から狙い打ってみることにしました。
といっても一年生の担任の先生方に直接
「ロボカップ(やロボット)に興味ありそうな子いますかね?」と聞いて回るだけですけど。
まぁこれだけでも結構効果ありますね。それだけでなく、今年度の一年生の傾向とかがわかって面白いです。
この聞き込みで分かったことはふたつ。
・200クラスに一人、うちにきたいと言っている子がいる。
・今年の一年生は例年以上にビラ配りに敏感。
という訳で、その来たいと言っている子には月曜日の放課後にならうちにきてくれれば・・・等ということを
担任の先生が伝えてくれると仰ってくれたので、部室に来るのを待ち、
そしてビラでも作ろうかと、いうことになりました。
まぁA5サイズということなので簡潔に、部の紹介と部室の場所だけ。
やっぱり場所がわからないらしく、来たくてもこれない人が結構いるんだとか。
とりあえず最低でもあと3人は確保しないといけないのでなんとかして頑張らないとー。
因みに今入部している(?)一年生は3人、きたいと言っているのが2人。
ルール変更により後増やさなきゃいけない人数が3人。
という訳で一年生は8人になる見込みです。
え?8人?あっ多い(笑)
まぁ今入部している3人は、既にロボカップ経験が豊富なので、新入生としてはカウントしてませんが・・・
それでもあと5人をどっかに収めなきゃいけなんですね。おぅわ大変だ(笑)
という訳で岸壁で鵜飼をしていたのが、大海原に出て海釣りをすることになりました。
まぁその方が入る確率高いですからいいですよね。
さて、そんな感じで今日は部内情勢を書いて終了かな。
明日アタリ回路カテゴリーが暴れ始めます。
それでは・・・
あれ?8人ってロボコンより多い!
(^・ω・)ノRadiumProduction in RoboCupJunior
遂に動き始めました。2011年度の産技高専ロボカップ部。
今年のスタートは全滅、ゼロからのスタートですね。
まぁ何を持ってスタートと言っているかというと・・・
今日から「新入部員の募集を始めたから」なのです。
遅い、圧倒的に遅いです。まぁ4月中は自分たちの大会で手一杯でしたから・・・部も落ちついてきたし、
一年生の対応についてもまとまったのでようやくといったところでしょう。
まぁ。既に右のリンクにもある、がるーだ工房とMr.fattyの作業日誌の管理人はうちの新入部員だったりします。
彼らは今年の大会にも参加していたので特別ですね。既に入部確定組ですので、除外して考えています。
やっぱりあれですよ。部活と言えば春=新入部員って感じじゃあないですか。その一年生の募集をしないと、
その年度の部活動が始まらないっていうか、そんな気になりません?(じゃあ去年は活動してすらいなかったのか?)
という訳で新入部員を募集したのですが、やっぱり既に部に一年生がいると強いですね。
さっそく二人、入ろうかなと言っている新入生が出てきてくれたみたいです。ありがたやありがたや。
こんなマイナーな部活なので、基本的にいくら宣伝しても一年生に、
「この部活の意味自体が理解されない」んですよね。
決め台詞は「ロボコンと何が違うの?」ですから。
まぁうちに限ってロボコン部とロボカップ部は割と中の人は同じですけど・・・
まぁ自分も昔、同じことを言ったらしいので、何も言えませんが(笑)
やっぱり日本では某NHKのせいで「ロボコン」の知名度が高すぎるんでしょうね。ロボコン以外は理解されない(笑)
まぁそれでも今年のロボコン部の新入部員は5人で結構ヤバい状態ですけど・・・(汗)
という訳で逆にロボット系の部活は極端に部員勧誘が難しいんですよね。
そういう中で、一年生の中に、
ロボカップを知っていて、周りを巻き込んでくれるような人がいてくれると大変助かるわけなのです。
今年はそういう意味で強いからたくさん集まるかな?
まぁ一日で2人ですから、めっちゃ幸先良いですよね。ここから先に期待です(笑)
何故か新入部員を集めるのが新入部員の仕事になってる・・・(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
今年のスタートは全滅、ゼロからのスタートですね。
まぁ何を持ってスタートと言っているかというと・・・
今日から「新入部員の募集を始めたから」なのです。
遅い、圧倒的に遅いです。まぁ4月中は自分たちの大会で手一杯でしたから・・・部も落ちついてきたし、
一年生の対応についてもまとまったのでようやくといったところでしょう。
まぁ。既に右のリンクにもある、がるーだ工房とMr.fattyの作業日誌の管理人はうちの新入部員だったりします。
彼らは今年の大会にも参加していたので特別ですね。既に入部確定組ですので、除外して考えています。
やっぱりあれですよ。部活と言えば春=新入部員って感じじゃあないですか。その一年生の募集をしないと、
その年度の部活動が始まらないっていうか、そんな気になりません?(じゃあ去年は活動してすらいなかったのか?)
という訳で新入部員を募集したのですが、やっぱり既に部に一年生がいると強いですね。
さっそく二人、入ろうかなと言っている新入生が出てきてくれたみたいです。ありがたやありがたや。
こんなマイナーな部活なので、基本的にいくら宣伝しても一年生に、
「この部活の意味自体が理解されない」んですよね。
決め台詞は「ロボコンと何が違うの?」ですから。
まぁうちに限ってロボコン部とロボカップ部は割と中の人は同じですけど・・・
まぁ自分も昔、同じことを言ったらしいので、何も言えませんが(笑)
やっぱり日本では某NHKのせいで「ロボコン」の知名度が高すぎるんでしょうね。ロボコン以外は理解されない(笑)
まぁそれでも今年のロボコン部の新入部員は5人で結構ヤバい状態ですけど・・・(汗)
という訳で逆にロボット系の部活は極端に部員勧誘が難しいんですよね。
そういう中で、一年生の中に、
ロボカップを知っていて、周りを巻き込んでくれるような人がいてくれると大変助かるわけなのです。
今年はそういう意味で強いからたくさん集まるかな?
まぁ一日で2人ですから、めっちゃ幸先良いですよね。ここから先に期待です(笑)
何故か新入部員を集めるのが新入部員の仕事になってる・・・(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
また新しいカテゴリーができてしまいました。回路がアリならプログラムもアリだろ!っていう発想で作ってみました。
まぁ。今回は一回目ということもありますので昔お世話になったROBOLABについての記事を書こうと思ったのですが、
ROBOLABってよくよく考えたらタイル式なので、紹介をするのにいちいちタイルの写真が必要になってしまう・・・
これは非常にめんどくさいのでいきなり「C言語」というものを紹介しようかと思っています。
まぁ今日は簡単なところから、
まず、C言語ってなんでしょう。とりあえず調べてみたら・・・
C言語(Cげんご)は、1972年にAT&Tベル研究所のデニス・リッチー (Dennis M. Ritchie) が主体となって作ったプログラミング言語である。英語圏では単に C と呼称されており、日本でも文書や文脈によっては同様に C と呼称される。 UNIXの移植性を高めるために開発された経緯から、オペレーティングシステムカーネル向けの低レベルな記述ができることを特徴としている。byうぃきぺでぃあ
へぇ。結構新しいんだ・・・。なんてことは置いておいて。
要するにプラグラムするための言語なんです。ソフトのことじゃないんです。
言語というからには、どこかの世界で通じる言葉なんですよね。
じゃあどこの世界でこの言葉は通じるのか。
とりあえず、地球上でこの言葉が通じるのは人間とコンパイラというものだけです。ロボットには通じません。
まぁこの辺でふたつほど疑問が出てきますよね。
コンパイラって何?ということと、ロボットには通じない?というあたりでしょうか。
このふたつの疑問、これは人間がロボットにプログラムを送る仕組みを説明すれば、同時に理解することができます。
まぁ、普通は人間がプログラムを書いてそれをロボットに送るので順序的には人間が一番最初になりますが、
それだと説明が難しいので、今回はあえて一番最後にあたるロボットから説明をしていこうと思います。
まずロボット、この中には小さいコンピューター、「マイコン」が入っていて、
それが人間でいう脳になってロボットを動かしている、という話はしたかと思います。
でもその脳はちょっと頭が悪い・・・というより人間の頭の構造とだいぶ違うので、
人間が理解できるような、文字で書かれた言語なんてものは到底理解できないんです。
じゃあマイコンはどんな言語が理解できるか、それは数字です。しかも1と0だけの二進法でしか理解ができません。
つまり、PCからロボットに送るプログラムは、1と0の羅列だけで表現しなくてはなりません。
でも、人間が直接そんな1と0との羅列だけで表されたプログラムなんか書けると思いますか?
まぁ一般人には無理ですね。なので人間側はわかりやすいように文字でプログラムを書く訳です。
でも、それでは使う言語が違うので人間は直接ロボットに命令を与える(プログラムを送る)ことができないですよね。
日本語のできないアメリカ人と、英語のできない高専生では会話になりませんよね。それと同じです。
そこで何が必要かというと・・・何が必要だと思います?まぁ現実の世界だと・・・
通訳ですよね(笑)
まぁそれ同じように、人間が書いた言語とロボットが理解できる1と0の羅列、これを機械語といいますが、
このふたつを翻訳できる「なにか」が必要になるわけです。
まぁその何かが翻訳機「コンパイラ」という訳です。
まぁこれはソフト・・・の部類なのかな?一応exeファイルだし。
まぁこれに人間が書いた言語を入れると勝手にロボットが理解できる機械語に変換してくれるよーっていう代物です。
という訳でプログラムを送る流れとしては、
人間がPCの前の椅子に座る
↓
PCの電源を入れる
↓
パスワードを入れてOSを起動させる
↓
プログラムを書く
↓
打ち間違える
↓
打ち直す
↓
プログラムが完成する
↓
コンパイルさせる
↓
コンパイルされたファイル(機械語)をロボットに送る。
↓
ロボットが動く
↓
ロボカップジュニアで世界優勝!
といった感じです。だったらいいなぁ。
まぁそういうことなので人が書いたプログラムは直接ロボットに送っても理解されず、
コンパイラという翻訳機にしか理解してもらえない。という訳です。
因みに一時期うちの学校で、人間相互でC言語を使ってコミュニケーションを図っていたこともありましたが、
あれはどうにお勧めできません。やっぱりC言語は人対コンパイラの構図以外では使わない方が無難です。
まぁそんな感じのC言語です。
まぁこのようにコンパイラがあって、プログラムを一度変換して実行や送信をしなくてはいけない言語を
「手続き型言語」と呼びます。その中でもこういった形式の言語はコンパイラ言語と呼びますね。
BとかCとかDとかがこれに該当しますね。あとはJAVAとかC++とかもそうですね。あとTex(言・・・語・・・?)とか・・・
LEGOでいうならNQC、NXC、RobotC全部そうですね。ROBOLABやNXT-Gも中身はコンパイラ言語です。
それと対照にコンパイルが入らない言語もあります。
それを「スプリクト言語」といいます。
これはなんでコンパイルがいらんかというと、基本的にこの言語たちはPC内でしか使わない言語なんですね。
だからわざわざ機械語に翻訳しなくても理解できちゃうんです。(まぁホントはちょっと違うけど・・・)
特にWeb系列の言語には多いですね、JAVAスプリクトとかHTMLとかパイソンやエクセルのVBAもそうじゃないかな?
一部怪しいですが気しない方向で。
とまぁこんな感じ終わってみればC言語というよりコンパイラ言語の説明になってしまっていましたね(笑)
次回のProgram記事では、このコンパイラについてもうちっと詳しく説明します。
実際のC言語の書き方とかについては、もうちょい先になりそうですね。
ところで、回路、プログラムときたら次に来るのは・・・ロボットの機械構造・・・ですよね?
一番苦手分野なので微妙な記事になるかもですが、今後はLEGOブロックに関してを中心に
機械構造についてのカテゴリーも増やしていこうかと考えております。
それでは。
(^・ω・)ノRadiumProduction in RoboCupJunior
まぁ。今回は一回目ということもありますので昔お世話になったROBOLABについての記事を書こうと思ったのですが、
ROBOLABってよくよく考えたらタイル式なので、紹介をするのにいちいちタイルの写真が必要になってしまう・・・
これは非常にめんどくさいのでいきなり「C言語」というものを紹介しようかと思っています。
まぁ今日は簡単なところから、
まず、C言語ってなんでしょう。とりあえず調べてみたら・・・
C言語(Cげんご)は、1972年にAT&Tベル研究所のデニス・リッチー (Dennis M. Ritchie) が主体となって作ったプログラミング言語である。英語圏では単に C と呼称されており、日本でも文書や文脈によっては同様に C と呼称される。 UNIXの移植性を高めるために開発された経緯から、オペレーティングシステムカーネル向けの低レベルな記述ができることを特徴としている。byうぃきぺでぃあ
へぇ。結構新しいんだ・・・。なんてことは置いておいて。
要するにプラグラムするための言語なんです。ソフトのことじゃないんです。
言語というからには、どこかの世界で通じる言葉なんですよね。
じゃあどこの世界でこの言葉は通じるのか。
とりあえず、地球上でこの言葉が通じるのは人間とコンパイラというものだけです。ロボットには通じません。
まぁこの辺でふたつほど疑問が出てきますよね。
コンパイラって何?ということと、ロボットには通じない?というあたりでしょうか。
このふたつの疑問、これは人間がロボットにプログラムを送る仕組みを説明すれば、同時に理解することができます。
まぁ、普通は人間がプログラムを書いてそれをロボットに送るので順序的には人間が一番最初になりますが、
それだと説明が難しいので、今回はあえて一番最後にあたるロボットから説明をしていこうと思います。
まずロボット、この中には小さいコンピューター、「マイコン」が入っていて、
それが人間でいう脳になってロボットを動かしている、という話はしたかと思います。
でもその脳はちょっと頭が悪い・・・というより人間の頭の構造とだいぶ違うので、
人間が理解できるような、文字で書かれた言語なんてものは到底理解できないんです。
じゃあマイコンはどんな言語が理解できるか、それは数字です。しかも1と0だけの二進法でしか理解ができません。
つまり、PCからロボットに送るプログラムは、1と0の羅列だけで表現しなくてはなりません。
でも、人間が直接そんな1と0との羅列だけで表されたプログラムなんか書けると思いますか?
まぁ一般人には無理ですね。なので人間側はわかりやすいように文字でプログラムを書く訳です。
でも、それでは使う言語が違うので人間は直接ロボットに命令を与える(プログラムを送る)ことができないですよね。
日本語のできないアメリカ人と、英語のできない高専生では会話になりませんよね。それと同じです。
そこで何が必要かというと・・・何が必要だと思います?まぁ現実の世界だと・・・
通訳ですよね(笑)
まぁそれ同じように、人間が書いた言語とロボットが理解できる1と0の羅列、これを機械語といいますが、
このふたつを翻訳できる「なにか」が必要になるわけです。
まぁその何かが翻訳機「コンパイラ」という訳です。
まぁこれはソフト・・・の部類なのかな?一応exeファイルだし。
まぁこれに人間が書いた言語を入れると勝手にロボットが理解できる機械語に変換してくれるよーっていう代物です。
という訳でプログラムを送る流れとしては、
人間がPCの前の椅子に座る
↓
PCの電源を入れる
↓
パスワードを入れてOSを起動させる
↓
プログラムを書く
↓
打ち間違える
↓
打ち直す
↓
プログラムが完成する
↓
コンパイルさせる
↓
コンパイルされたファイル(機械語)をロボットに送る。
↓
ロボットが動く
↓
ロボカップジュニアで世界優勝!
といった感じです。だったらいいなぁ。
まぁそういうことなので人が書いたプログラムは直接ロボットに送っても理解されず、
コンパイラという翻訳機にしか理解してもらえない。という訳です。
因みに一時期うちの学校で、人間相互でC言語を使ってコミュニケーションを図っていたこともありましたが、
あれはどうにお勧めできません。やっぱりC言語は人対コンパイラの構図以外では使わない方が無難です。
まぁそんな感じのC言語です。
まぁこのようにコンパイラがあって、プログラムを一度変換して実行や送信をしなくてはいけない言語を
「手続き型言語」と呼びます。その中でもこういった形式の言語はコンパイラ言語と呼びますね。
BとかCとかDとかがこれに該当しますね。あとはJAVAとかC++とかもそうですね。あとTex(言・・・語・・・?)とか・・・
LEGOでいうならNQC、NXC、RobotC全部そうですね。ROBOLABやNXT-Gも中身はコンパイラ言語です。
それと対照にコンパイルが入らない言語もあります。
それを「スプリクト言語」といいます。
これはなんでコンパイルがいらんかというと、基本的にこの言語たちはPC内でしか使わない言語なんですね。
だからわざわざ機械語に翻訳しなくても理解できちゃうんです。(まぁホントはちょっと違うけど・・・)
特にWeb系列の言語には多いですね、JAVAスプリクトとかHTMLとかパイソンやエクセルのVBAもそうじゃないかな?
一部怪しいですが気しない方向で。
とまぁこんな感じ終わってみればC言語というよりコンパイラ言語の説明になってしまっていましたね(笑)
次回のProgram記事では、このコンパイラについてもうちっと詳しく説明します。
実際のC言語の書き方とかについては、もうちょい先になりそうですね。
ところで、回路、プログラムときたら次に来るのは・・・ロボットの機械構造・・・ですよね?
一番苦手分野なので微妙な記事になるかもですが、今後はLEGOブロックに関してを中心に
機械構造についてのカテゴリーも増やしていこうかと考えております。
それでは。
(^・ω・)ノRadiumProduction in RoboCupJunior
今年の関東ブロックに使用したプレゼンポスターです。

殆ど東東京ノードの流用でしたが、またプレゼンテーション賞を頂いちゃってます(笑)
まぁ今回も例の如くパワーポイント(パワポ)を使って書いています。
やっぱり文面じゃなくてポスターとか作るときはパワポが一番楽ですよね。
昔はフォトショとか使ってたりもしましたけど・・・。特に写真とかが便利すぎるので(笑)
関東ブロックのプレゼンテーション賞は手書きじゃないと取れないという都市伝説があったらしいのですが、
まぁこの結果で伝説が伝説であることが証明されました。根拠なんてないよね。
それにしても、プレゼンの評価基準ってなんなんでしょうね。採点基準がいくらかあって、
その個別の点数の総合で出しているということまでは知っているのですが・・・(ダンスの得点みたい)
最初、ルールに記載されている「書くといいですよー」的な要綱がちゃんと書けているかで
判断しているのかとも思ったのですが、どうにも違うようなのですね。
現に今年のポスターはあの要綱完全無視だし・・・
多分プレゼンテーションをするポスターなのだから、
何を伝えたいのかがきちんとかけていて、それについての掘り下げた説明を加え
尚且つ見た目がすっきりしていそうなものを選んでいるようにも思えますね。
というより毎年基準が変わってるのか?
まぁ結局ポスターなので見やすさ第一ということでしょうか。
なんかその辺でやっぱり初手の差がつくんでしょうね。結局のところ。
でもそっから先は?うーん、選手には基準を公開しないようにしているようなので
やっぱり毎年変わっているわけではないのでしょうか?
まぁ公開していないってことは要するに
審査基準のみに要点を置いたプレゼンを書いてほしくないって意図からなのでしょうね。
でも審査基準を満たすようなプレゼン=良いプレゼンなのでは・・・?なら逆に公開してもいいような・・・
だってそのほうがみんな質の高いプレゼン作ってきそうだし・・・
ブログか何かで昨年度のプレゼン賞の選考基準を参考として公開すべきのような気もします。
まぁ運営サイドの負担増加しますから無理でしょうけど(笑)
因みに、東東京ノードの時より誤字が減っていますが、それでも実は多少残っていたという罠。
やっぱり漢字は苦手です・・・。
まぁこんな感じで今日の記事は終了です。
(^・ω・)ノRadiumProduction in RoboCupJunior
殆ど東東京ノードの流用でしたが、またプレゼンテーション賞を頂いちゃってます(笑)
まぁ今回も例の如くパワーポイント(パワポ)を使って書いています。
やっぱり文面じゃなくてポスターとか作るときはパワポが一番楽ですよね。
昔はフォトショとか使ってたりもしましたけど・・・。特に写真とかが便利すぎるので(笑)
関東ブロックのプレゼンテーション賞は手書きじゃないと取れないという都市伝説があったらしいのですが、
まぁこの結果で伝説が伝説であることが証明されました。根拠なんてないよね。
それにしても、プレゼンの評価基準ってなんなんでしょうね。採点基準がいくらかあって、
その個別の点数の総合で出しているということまでは知っているのですが・・・(ダンスの得点みたい)
最初、ルールに記載されている「書くといいですよー」的な要綱がちゃんと書けているかで
判断しているのかとも思ったのですが、どうにも違うようなのですね。
現に今年のポスターはあの要綱完全無視だし・・・
多分プレゼンテーションをするポスターなのだから、
何を伝えたいのかがきちんとかけていて、それについての掘り下げた説明を加え
尚且つ見た目がすっきりしていそうなものを選んでいるようにも思えますね。
というより毎年基準が変わってるのか?
まぁ結局ポスターなので見やすさ第一ということでしょうか。
なんかその辺でやっぱり初手の差がつくんでしょうね。結局のところ。
でもそっから先は?うーん、選手には基準を公開しないようにしているようなので
やっぱり毎年変わっているわけではないのでしょうか?
まぁ公開していないってことは要するに
審査基準のみに要点を置いたプレゼンを書いてほしくないって意図からなのでしょうね。
でも審査基準を満たすようなプレゼン=良いプレゼンなのでは・・・?なら逆に公開してもいいような・・・
だってそのほうがみんな質の高いプレゼン作ってきそうだし・・・
ブログか何かで昨年度のプレゼン賞の選考基準を参考として公開すべきのような気もします。
まぁ運営サイドの負担増加しますから無理でしょうけど(笑)
因みに、東東京ノードの時より誤字が減っていますが、それでも実は多少残っていたという罠。
やっぱり漢字は苦手です・・・。
まぁこんな感じで今日の記事は終了です。
(^・ω・)ノRadiumProduction in RoboCupJunior
プレゼン会議の筈が急きょ座談会に。
なんかもう大変なことになってます。
何が大変って出てくるアイデアが。もう全く意味不明です。
その出たロボットのアイデアというのが・・・
・戦車。
・ロボコンやりたい。
・地デジ。
・スカイツリー。
・ゴジラ。
・対空射砲。
・6000mmの高さのロボット。
・4砲同時発射(散弾?)。
・空を飛ぶ。
・ホバークラフト。
・あえてボーリングにしてみる。
・チームメンバーを電飾する。
・コスプレ
・コ○ン的な何か(寧ろバーロ的)。
・ローリングジャンプショット(投球的な意味で)。
・レールガン
・ロボットをしゃべらせてみる。
・アイ○ーイ的な何かでコントロール
・巨大エアガン
・気がつけば、ラグビー部。
・やわらか戦車(硬)↓

とまぁこのような感じで進む雰囲気のない座談会を暫く繰り返す模様となっています。
それで、アイデアとはまた別の話なのですが、今機械の方で設計中のロボットの横幅がなんと
15㎝
・・・・?
奇跡的に薄いです。ってか普通にルール違反ですね。
今大会では2足ロボットは縦横1000㎜高さ1500mmを超えていなければならないという規定がありますので・・・
さてと、一体どうするのでしょうか・・・(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s ロボコン今年は泊りだって。やったね♪
なんかもう大変なことになってます。
何が大変って出てくるアイデアが。もう全く意味不明です。
その出たロボットのアイデアというのが・・・
・戦車。
・ロボコンやりたい。
・地デジ。
・スカイツリー。
・ゴジラ。
・対空射砲。
・6000mmの高さのロボット。
・4砲同時発射(散弾?)。
・空を飛ぶ。
・ホバークラフト。
・あえてボーリングにしてみる。
・チームメンバーを電飾する。
・コスプレ
・コ○ン的な何か(寧ろバーロ的)。
・ローリングジャンプショット(投球的な意味で)。
・レールガン
・ロボットをしゃべらせてみる。
・アイ○ーイ的な何かでコントロール
・巨大エアガン
・気がつけば、ラグビー部。
・やわらか戦車(硬)↓
とまぁこのような感じで進む雰囲気のない座談会を暫く繰り返す模様となっています。
それで、アイデアとはまた別の話なのですが、今機械の方で設計中のロボットの横幅がなんと
15㎝
・・・・?
奇跡的に薄いです。ってか普通にルール違反ですね。
今大会では2足ロボットは縦横1000㎜高さ1500mmを超えていなければならないという規定がありますので・・・
さてと、一体どうするのでしょうか・・・(笑)
(^・ω・)ノRadiumProduction in RoboCupJunior
P.s ロボコン今年は泊りだって。やったね♪
I2Cライン制御。できる気がしません。
そもそもこいつら固有アドレス持ってないじゃんー><。
こいつら↓

しかも他のアドレスも全体的に被ってるし・・・確かにこりゃ無理だ。
むしろなんで他のソフトウェアはラインができるんでしょうかね?できる方がおかしいですよ・・・
恐らくアドレスの書き換えか、レスポンスの停止命令を流すような命令を中でやってるんでしょう。
何れもNXCでは(環境的に)不可能です。
でも、固有アドレスが違うものならできるんじゃないか?と思って市販のセンサーをつないでラインしてみました。
そしたら・・・
file error
どうやらつないだ2つのセンサーの固有ADが違うとこうなるみたいです。
コンパスセンサーだけは、何故かうまくいきましたが。
それだけでなく、コンパスセンサーだけはコンパス×超音波の組み合わせでない限りちゃんと値が返ってきました。
超音波咬むと流石にダメでしたけど・・・
・・・という訳で、NXCでのI2Cライン制御はどうにもこうにも無理っぽいです。関数とかそういう関係ではありませんね。
両方のセンサーから値を出せる組み合わせは
「コンパス×ハイテック、超音波以外のI2Cセンサー」だけのようです。
市販のセンサー同士の組み合わせもダメってどういうことなの・・・><。
うん。無理なのはわかった。でもRobotCを使う(そして金を削る)前にちょっと試してみたいことがあるのです。
それはNBCへの挑戦。
NBCってのはNQCやNXCをやったことのある方はご存知かもしれませんが、
これです。
もちろん、まともに踏み込める領域ではありません。アセンブラというヤツに近いものです。
簡単に申しますと、NXCと機械語の中間にある言語。というべきものでしょうか。
さて、これを使えばライン制御ができるのでしょうか。
それともNXCの二の舞になってRobotCを買うことになるのでしょうか。
結果報告は随分先になるでしょうが、なんか進展あったら報告します。
あ。NBCに踏み込むついでにNQCやNXCやNBCについての記事もこれから書いていこうかな。
また記事のジャンル(とカテゴリー)が増えそうな予感が・・・
まぁそんな感じで今日もレポートという現実から逃げてプログラムで遊ぶLuzでした。
それでは。
(^・ω・)ノRadiumProduction in RoboCupJunior
そもそもこいつら固有アドレス持ってないじゃんー><。
こいつら↓
しかも他のアドレスも全体的に被ってるし・・・確かにこりゃ無理だ。
むしろなんで他のソフトウェアはラインができるんでしょうかね?できる方がおかしいですよ・・・
恐らくアドレスの書き換えか、レスポンスの停止命令を流すような命令を中でやってるんでしょう。
何れもNXCでは(環境的に)不可能です。
でも、固有アドレスが違うものならできるんじゃないか?と思って市販のセンサーをつないでラインしてみました。
そしたら・・・
file error
どうやらつないだ2つのセンサーの固有ADが違うとこうなるみたいです。
コンパスセンサーだけは、何故かうまくいきましたが。
それだけでなく、コンパスセンサーだけはコンパス×超音波の組み合わせでない限りちゃんと値が返ってきました。
超音波咬むと流石にダメでしたけど・・・
・・・という訳で、NXCでのI2Cライン制御はどうにもこうにも無理っぽいです。関数とかそういう関係ではありませんね。
両方のセンサーから値を出せる組み合わせは
「コンパス×ハイテック、超音波以外のI2Cセンサー」だけのようです。
市販のセンサー同士の組み合わせもダメってどういうことなの・・・><。
うん。無理なのはわかった。でもRobotCを使う(そして金を削る)前にちょっと試してみたいことがあるのです。
それはNBCへの挑戦。
NBCってのはNQCやNXCをやったことのある方はご存知かもしれませんが、
これです。
もちろん、まともに踏み込める領域ではありません。アセンブラというヤツに近いものです。
簡単に申しますと、NXCと機械語の中間にある言語。というべきものでしょうか。
さて、これを使えばライン制御ができるのでしょうか。
それともNXCの二の舞になってRobotCを買うことになるのでしょうか。
結果報告は随分先になるでしょうが、なんか進展あったら報告します。
あ。NBCに踏み込むついでにNQCやNXCやNBCについての記事もこれから書いていこうかな。
また記事のジャンル(とカテゴリー)が増えそうな予感が・・・
まぁそんな感じで今日もレポートという現実から逃げてプログラムで遊ぶLuzでした。
それでは。
(^・ω・)ノRadiumProduction in RoboCupJunior
何度やれば気が済むのでしょうか。また角度センサーの紹介です。
しかもまたランクが上がっています。
なんてったって今度のはバーニアのセンサーですから・・・

今度のはなにができるかというと、
・角度検知
・角速度検知
・角加速度検知
です。中に微分回路が搭載されているのが丸わかりですね(笑)
ただし、回転数の検知はできません。なぜかというと検出範囲が0~6.28rad(ラジアン)だからです。
1radは・・・いやめんどくさい。3.14rad=180°ですから6.28radだと倍の360°
つまり0~360°までしか検知できないようです。
つまりどういうことかというと、センサーの軸が1回転しかしないということです。
つまり単純に角度の検知しかできない角度センサーということになります。
1回転しかできないのでモーターに繋ぐことはできませんね。
ロボカップジュニアで使う上では逆に性能が悪いと思うかもしれません。
まぁでも詳しくは書かれていませんが、精度がアホみたいに良いようです。
なんてったって$216もしますから・・・(笑)
まぁお金に余裕があって遊んでみたい人は買ってみるのもいいかもしれませんよ。
まぁLEGO規格ではないのでかなり苦労するとは思いますが・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
しかもまたランクが上がっています。
なんてったって今度のはバーニアのセンサーですから・・・
今度のはなにができるかというと、
・角度検知
・角速度検知
・角加速度検知
です。中に微分回路が搭載されているのが丸わかりですね(笑)
ただし、回転数の検知はできません。なぜかというと検出範囲が0~6.28rad(ラジアン)だからです。
1radは・・・いやめんどくさい。3.14rad=180°ですから6.28radだと倍の360°
つまり0~360°までしか検知できないようです。
つまりどういうことかというと、センサーの軸が1回転しかしないということです。
つまり単純に角度の検知しかできない角度センサーということになります。
1回転しかできないのでモーターに繋ぐことはできませんね。
ロボカップジュニアで使う上では逆に性能が悪いと思うかもしれません。
まぁでも詳しくは書かれていませんが、精度がアホみたいに良いようです。
なんてったって$216もしますから・・・(笑)
まぁお金に余裕があって遊んでみたい人は買ってみるのもいいかもしれませんよ。
まぁLEGO規格ではないのでかなり苦労するとは思いますが・・・
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ