RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
トランジスタの続きです。
前回はトランジスタってどんなもの?なんて話を簡潔にしたかと思います。
今日は前回の最後に話、なんであの回路がダメかという話からです。
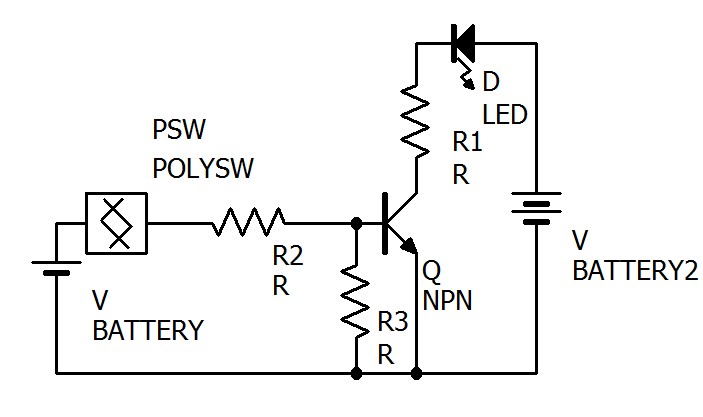
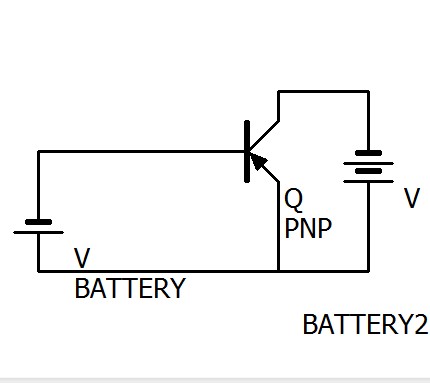
前回の回路・・・例を取ってnpnの方で説明しましょうか。
前回の回路はこれです。
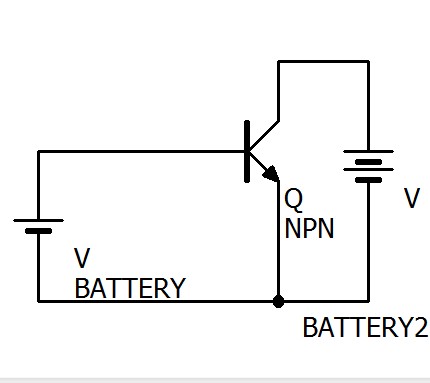
これでこのBATTERYが繋がっていればトランジスタはONになり、
繋がっていなければOFFになる・・・となるはずですよね。
結構教科書とかでも、この図が正しいつなぎ方として書かれていることが多いんですよ。
要するにこれはトランジスタを理解するうえでの理論上は問題ない回路図なんですよね。
でも現実にこの回路は作ると色々と問題が生じます。
今回はその主な問題を順々に解決していきます。
まず、一つ目の問題、
この状況、この状況でトランジスタがONになったらどうなるでしょう。
コレクタとエミッタが繋がるんだから・・・コレクタの先にはBATTERY2の+側、エミッタの先にはBATTERY2の-側。
これ、ショートしてませんか?
電源の+と-が繋がっている訳ですから・・・ねぇ。
まぁ厳密にはトランジスタにも微量に内部抵抗がありますから、ショートはしてませんけど・・・
それでもC-E(コレクタ‐エミッタ)間にとてつもない大電流が流れてしまいます。
となると、当然、ダイオードと同じでトランジスタにも流して良い電流の上限、絶対最大定格がありますから
それを超えた電流がトランジスタに流れると弾けます。
トランジスタは弾けると良い音しますよ♪
まずこれが一つ目の問題。
次の問題同じように今度はベースとエミッタを見てみましょう。
ベースの先はBATTERYの+側、エミッタの先はBATTERYの-側、これもショートしてますね。
B-E(ベース-エミッタ)間に大電流が流れてしまっていますね。これも結構やばいです。
絶対最大定格を超えてしまい、良い音で爆ぜることでしょう。
特にベースに流せる電流量はとても少ないので、電池なんか直でつないだら確実に爆ぜることでしょう。
そして最後の問題、
例えば電池の+がベースに繋がっていなかったらこの回路、どうなりますか?
もちろん繋がっていませんからONにはなりませんよね。
じゃあOFF?
実はOFFともいえないのです。
デジタルの電子回路では、常に信号はONかOFFのふたつのみ。つまり必ずどちらかでなくてはならないのです。
ONというのは電気が来ている状態、つまり+に繋がっている状態を指しますね。
ではOFFというのは?
電気が来ていない状態?いえ、そうではなく、
正確には-に繋がっている状態を指すんです。
それ以外に該当するのは全部「不定」という状態として扱われます。オープン、ハイインピーダンスとも言いますね。
これは一部の素子を除いて、結構まずい状態です。ONかOFFの二つで判断するのに、どっちでもない状態・・・
これはトランジスタの動作がどうなるか、まったくわかりません。とても安定しない、不定な状態になります。
こういった状態も0か1かのデジタル回路では一般にタブーです。
という訳でこれも避けなければなりません。
このような3点の問題がこの回路にはあるのです。
じゃあこの問題、どうしたら解決するでしょうか。
答えは全部、「抵抗」です。
ではどのように抵抗を配置すればいいのでしょうか。
まぁこのような感じになります。
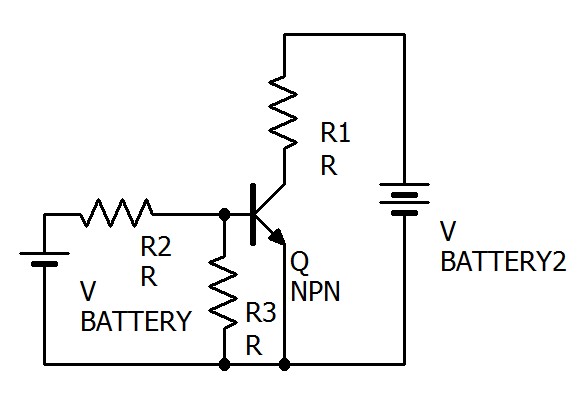
抵抗が3つ追加されました。
まずR1について。
これは一つ目の問題を解決する抵抗です。というよりこれは抵抗でなくても構わないのだけど・・・
ここになにかしらの負荷を配置することで、BATTERY2はショートしなくなります。
実際に使うときはこの部分をトランジスタを使って制御したいものを繋ぎかえます。
こういったものを負荷といってこれを抵抗で置き換えたもの?を負荷抵抗といいます。
次にR2について、
これは単純に、ベースに流れる電流を制限するための抵抗です。電流制限抵抗ともいいます。
これの原理はオームの法則ですね。抵抗のところで紹介しました。
この部分に流せる電流は少ないのでこの抵抗は5~20k程度の大きい抵抗になることが殆どです。
最後にR3について。これはちょっと難しいです。
Bと電源のマイナス、つまりGNDの間に繋がっていますね。この抵抗、どういったものなのでしょうか?
例えばBATTERYが繋がっている時、これは普通に書き換えるとこんな風になりますね。
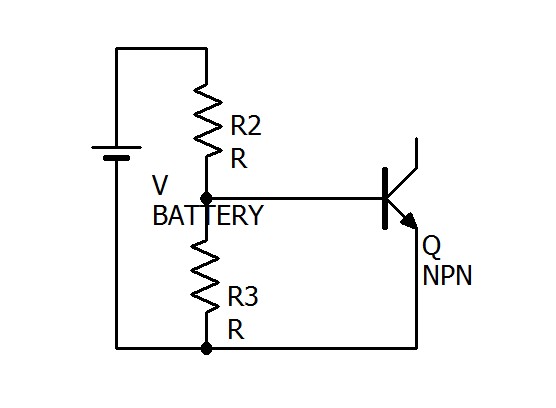
これだとBにいくらかの電圧がかかり、Bに電流が流れることがわかります。
次にBATTERYが繋がっていない場合。どうなりますかというと・・・
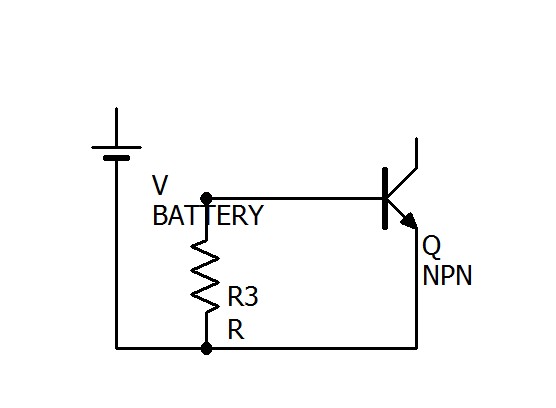
このようなります。
この時、R3には電圧がかかっていないので電流は流れず、R3は電圧降下を生みません。
従ってR3の電圧降下が0なのでR3の両端の電圧は同じになります。
という訳で片方が、BATTERYのー側・・・つまり0Vのところに繋がっているので反対側も0V、
つまりBの端子は不定ではなくしっかりと0Vになるのです。
これでトランジスタをしっかりとOFFにすることができます。
この抵抗はそのために使われる抵抗なのです。
このように外部から電流が流れてこないときに端子をOFFにする抵抗をプルダウン抵抗といいます。
逆にONニするすような抵抗をプルアップ抵抗といいます。
これで3つの抵抗によって3つの大きな問題は解決しました。
ようやく、トランジスタを使って回路をON,OFFするような回路を作製することができます。
簡単な回路だとこんな感じに作れます。
右上の四角いのはスイッチです。この回路はスイッチを押すとLEDが付き、離すとLEDが消える回路です。
今までの説明がわかれば、この回路は理解できるでしょう。きっと(笑)
このように押すと、つく、といった論理を正論理といいます。
逆に押すと、消える、という風な論理を負論理といいます。負論理の話は何れまた。
という風にこのようなトランジスタで電気的なスイッチを作成するとトランジスタの作用を
トランジスタのスイッチング作用とかいいます。
次の記事では、もうひとつのトランジスタの主な作用である、増幅作用について紹介しようと思います。
因みに今回使ったのはエミッタ接地回路という回路です。他にもコレクタ接地とベース接地があります。
増幅の問題上、ロボカップでは基本、エミッタ接地しか使わないとは思いますが、興味があれば調べてみると面白いかも。
この話もいつかするかも知れません。
それでは今日はこの辺で。
(^・ω・)ノRadiumProduction in RoboCupJunior
前回はトランジスタってどんなもの?なんて話を簡潔にしたかと思います。
今日は前回の最後に話、なんであの回路がダメかという話からです。
前回の回路・・・例を取ってnpnの方で説明しましょうか。
前回の回路はこれです。
これでこのBATTERYが繋がっていればトランジスタはONになり、
繋がっていなければOFFになる・・・となるはずですよね。
結構教科書とかでも、この図が正しいつなぎ方として書かれていることが多いんですよ。
要するにこれはトランジスタを理解するうえでの理論上は問題ない回路図なんですよね。
でも現実にこの回路は作ると色々と問題が生じます。
今回はその主な問題を順々に解決していきます。
まず、一つ目の問題、
この状況、この状況でトランジスタがONになったらどうなるでしょう。
コレクタとエミッタが繋がるんだから・・・コレクタの先にはBATTERY2の+側、エミッタの先にはBATTERY2の-側。
これ、ショートしてませんか?
電源の+と-が繋がっている訳ですから・・・ねぇ。
まぁ厳密にはトランジスタにも微量に内部抵抗がありますから、ショートはしてませんけど・・・
それでもC-E(コレクタ‐エミッタ)間にとてつもない大電流が流れてしまいます。
となると、当然、ダイオードと同じでトランジスタにも流して良い電流の上限、絶対最大定格がありますから
それを超えた電流がトランジスタに流れると弾けます。
トランジスタは弾けると良い音しますよ♪
まずこれが一つ目の問題。
次の問題同じように今度はベースとエミッタを見てみましょう。
ベースの先はBATTERYの+側、エミッタの先はBATTERYの-側、これもショートしてますね。
B-E(ベース-エミッタ)間に大電流が流れてしまっていますね。これも結構やばいです。
絶対最大定格を超えてしまい、良い音で爆ぜることでしょう。
特にベースに流せる電流量はとても少ないので、電池なんか直でつないだら確実に爆ぜることでしょう。
そして最後の問題、
例えば電池の+がベースに繋がっていなかったらこの回路、どうなりますか?
もちろん繋がっていませんからONにはなりませんよね。
じゃあOFF?
実はOFFともいえないのです。
デジタルの電子回路では、常に信号はONかOFFのふたつのみ。つまり必ずどちらかでなくてはならないのです。
ONというのは電気が来ている状態、つまり+に繋がっている状態を指しますね。
ではOFFというのは?
電気が来ていない状態?いえ、そうではなく、
正確には-に繋がっている状態を指すんです。
それ以外に該当するのは全部「不定」という状態として扱われます。オープン、ハイインピーダンスとも言いますね。
これは一部の素子を除いて、結構まずい状態です。ONかOFFの二つで判断するのに、どっちでもない状態・・・
これはトランジスタの動作がどうなるか、まったくわかりません。とても安定しない、不定な状態になります。
こういった状態も0か1かのデジタル回路では一般にタブーです。
という訳でこれも避けなければなりません。
このような3点の問題がこの回路にはあるのです。
じゃあこの問題、どうしたら解決するでしょうか。
答えは全部、「抵抗」です。
ではどのように抵抗を配置すればいいのでしょうか。
まぁこのような感じになります。
抵抗が3つ追加されました。
まずR1について。
これは一つ目の問題を解決する抵抗です。というよりこれは抵抗でなくても構わないのだけど・・・
ここになにかしらの負荷を配置することで、BATTERY2はショートしなくなります。
実際に使うときはこの部分をトランジスタを使って制御したいものを繋ぎかえます。
こういったものを負荷といってこれを抵抗で置き換えたもの?を負荷抵抗といいます。
次にR2について、
これは単純に、ベースに流れる電流を制限するための抵抗です。電流制限抵抗ともいいます。
これの原理はオームの法則ですね。抵抗のところで紹介しました。
この部分に流せる電流は少ないのでこの抵抗は5~20k程度の大きい抵抗になることが殆どです。
最後にR3について。これはちょっと難しいです。
Bと電源のマイナス、つまりGNDの間に繋がっていますね。この抵抗、どういったものなのでしょうか?
例えばBATTERYが繋がっている時、これは普通に書き換えるとこんな風になりますね。
これだとBにいくらかの電圧がかかり、Bに電流が流れることがわかります。
次にBATTERYが繋がっていない場合。どうなりますかというと・・・
このようなります。
この時、R3には電圧がかかっていないので電流は流れず、R3は電圧降下を生みません。
従ってR3の電圧降下が0なのでR3の両端の電圧は同じになります。
という訳で片方が、BATTERYのー側・・・つまり0Vのところに繋がっているので反対側も0V、
つまりBの端子は不定ではなくしっかりと0Vになるのです。
これでトランジスタをしっかりとOFFにすることができます。
この抵抗はそのために使われる抵抗なのです。
このように外部から電流が流れてこないときに端子をOFFにする抵抗をプルダウン抵抗といいます。
逆にONニするすような抵抗をプルアップ抵抗といいます。
これで3つの抵抗によって3つの大きな問題は解決しました。
ようやく、トランジスタを使って回路をON,OFFするような回路を作製することができます。
簡単な回路だとこんな感じに作れます。
右上の四角いのはスイッチです。この回路はスイッチを押すとLEDが付き、離すとLEDが消える回路です。
今までの説明がわかれば、この回路は理解できるでしょう。きっと(笑)
このように押すと、つく、といった論理を正論理といいます。
逆に押すと、消える、という風な論理を負論理といいます。負論理の話は何れまた。
という風にこのようなトランジスタで電気的なスイッチを作成するとトランジスタの作用を
トランジスタのスイッチング作用とかいいます。
次の記事では、もうひとつのトランジスタの主な作用である、増幅作用について紹介しようと思います。
因みに今回使ったのはエミッタ接地回路という回路です。他にもコレクタ接地とベース接地があります。
増幅の問題上、ロボカップでは基本、エミッタ接地しか使わないとは思いますが、興味があれば調べてみると面白いかも。
この話もいつかするかも知れません。
それでは今日はこの辺で。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日はなんと真面目に部活をしています!久しぶりだ・・・この状況。
まぁテストも終わって、危機感を覚えたのでしょうね。
とりあえず、今は副部長が隣でロボット作っています。
なんかどっかで見たことのあるものに戻っているような気もしますけど・・・
あ、僕ですか?僕はというと・・・
高専祭のことで頭がいっぱいで、ロボットの充電器を忘れてきた・・・(笑)
ということで、プログラムとかは何もできず、とりあえず串避けでも作っていました。
それでロボットの若干の設計変更が起きたり、という感じで終わりました。
うーん。なかなか先に進まない、倦怠期か?
とりあえず今日はそろそろお帰りの時間なのでこの辺で終了します。
それでは~
(^・ω・)ノRadiumProduction in RoboCupJunior
まぁテストも終わって、危機感を覚えたのでしょうね。
とりあえず、今は副部長が隣でロボット作っています。
なんかどっかで見たことのあるものに戻っているような気もしますけど・・・
あ、僕ですか?僕はというと・・・
高専祭のことで頭がいっぱいで、ロボットの充電器を忘れてきた・・・(笑)
ということで、プログラムとかは何もできず、とりあえず串避けでも作っていました。
それでロボットの若干の設計変更が起きたり、という感じで終わりました。
うーん。なかなか先に進まない、倦怠期か?
とりあえず今日はそろそろお帰りの時間なのでこの辺で終了します。
それでは~
(^・ω・)ノRadiumProduction in RoboCupJunior
とりあえずPIC講習ドタキャンされたので急に暇になりました。
試験は終了しましたよ。2重の意味で(笑)
ついでに個人面談も行いました。
結構適当に流しましたけど・・・(笑)
とりあえず今日は、チームで(?)ロボットを作りました。
といってもまだプロットですけど・・・
さて、こんな速度で間に合うのか・・・?
サッカーの方なんか、一番経験があり、サーカーチームのリーダー的存在になるであろうと期待していた総書記様が
予想通り留年の危機(というより手遅れ?)に瀕してしまったので部活どころではなく・・・
どうすんの?(笑)
とりあえず、総書記様は東京湾に放流したいと思います。
(^・ω・)ノRadiumProduction in RoboCupJunior
試験は終了しましたよ。2重の意味で(笑)
ついでに個人面談も行いました。
結構適当に流しましたけど・・・(笑)
とりあえず今日は、チームで(?)ロボットを作りました。
といってもまだプロットですけど・・・
さて、こんな速度で間に合うのか・・・?
サッカーの方なんか、一番経験があり、サーカーチームのリーダー的存在になるであろうと期待していた総書記様が
予想通り留年の危機(というより手遅れ?)に瀕してしまったので部活どころではなく・・・
どうすんの?(笑)
とりあえず、総書記様は東京湾に放流したいと思います。
(^・ω・)ノRadiumProduction in RoboCupJunior
実はチーム戦だったりするんですよね。今年から・・・
確かに何年も前からその傾向はありましたが、本当にやるなんて・・・
参加人数が変わらなければ来年はちょっと参加チーム数が減るのかな?なんて考えています。
チーム数は多い方がいいんだけどなー。枠増えるし
という訳で高専でも1ヶ月半ほど前にチーム分けが行われました。
といっても部員が一年生主体なので一年ばっかりなのですが・・・・
今日はそのチーム分けの話をしようかと思います。
うちの部活の場合、新入生が今年、11+1人入りました。
その中でサッカーの経験者が一人、レスキューは二人。
そして在校生で来年度の大会への出場をするのがサッカー1人レスキュー2人。何れも3年生。
合計で大会参加が15人になります(予定)。
それでこれをまず、参加したい競技に分けてみました。
まずとりあえず、サッカー、レスキュー、ダンスの3部門に。
これで4人,8人、3人になりました。
ダンスはまず確定、3人で1チームになって活動します。うちの部ではダンスの経験者がいないのでどうなることやら・・・
とりあえず3年生1人と1年生2人でやります。ガンバレ!
そして今年はサッカーもレスキューも希望者の半分が経験者という偶然が起こったので
とりあえず、経験者一人と未経験者一人でチームを組むことになりました。
これなら未経験者にマンツーマンで指導ができますからね。部としてもやりやすいです。
未経験者だけだと、やっぱりどうしても進めにくいので、後が難しくなりますからね。という考えです。
まぁそんな流れでサッカーが2チーム、レスキューが4チーム、ダンスが1チームとなりました。
高専のチーム編成はこんな感じです。他のところはどんなふうにやってるんだろうなぁ・・・
とりあえず今日はこれで以上です。
(^・ω・)ノRadiumProduction in RoboCupJunior
確かに何年も前からその傾向はありましたが、本当にやるなんて・・・
参加人数が変わらなければ来年はちょっと参加チーム数が減るのかな?なんて考えています。
チーム数は多い方がいいんだけどなー。枠増えるし
という訳で高専でも1ヶ月半ほど前にチーム分けが行われました。
といっても部員が一年生主体なので一年ばっかりなのですが・・・・
今日はそのチーム分けの話をしようかと思います。
うちの部活の場合、新入生が今年、11+1人入りました。
その中でサッカーの経験者が一人、レスキューは二人。
そして在校生で来年度の大会への出場をするのがサッカー1人レスキュー2人。何れも3年生。
合計で大会参加が15人になります(予定)。
それでこれをまず、参加したい競技に分けてみました。
まずとりあえず、サッカー、レスキュー、ダンスの3部門に。
これで4人,8人、3人になりました。
ダンスはまず確定、3人で1チームになって活動します。うちの部ではダンスの経験者がいないのでどうなることやら・・・
とりあえず3年生1人と1年生2人でやります。ガンバレ!
そして今年はサッカーもレスキューも希望者の半分が経験者という偶然が起こったので
とりあえず、経験者一人と未経験者一人でチームを組むことになりました。
これなら未経験者にマンツーマンで指導ができますからね。部としてもやりやすいです。
未経験者だけだと、やっぱりどうしても進めにくいので、後が難しくなりますからね。という考えです。
まぁそんな流れでサッカーが2チーム、レスキューが4チーム、ダンスが1チームとなりました。
高専のチーム編成はこんな感じです。他のところはどんなふうにやってるんだろうなぁ・・・
とりあえず今日はこれで以上です。
(^・ω・)ノRadiumProduction in RoboCupJunior
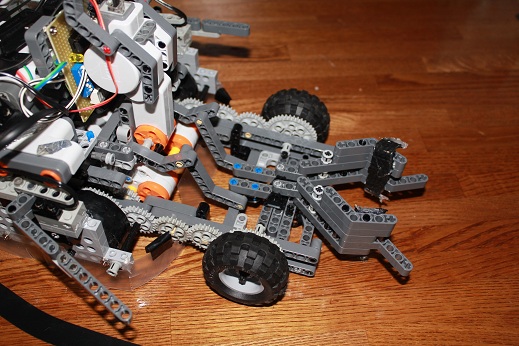
最近思うんですよね。
「これのどこがレスキューロボット」って?
このロボット、どっからみてもわからない・・・
レスキュー要素ってどこにあるんでしょうかね?でもこのロボットでレスキュー競技ができたんですよね・・・
レスキューなのに荒地を走るようにできてないし、そもそも人助けられないし、踏みつけるだけだし・・・
今のロボットはちゃんと被災者をつかむ機構がある・・・あるはあるのですが・・・
こんな感じ。
やっぱりレスキューとは程遠いような・・・。
なんか僕のイメージではレスキューロボットって・・・こう・・・瓦礫の中でもガタガタ移動できて
なんか・・・前後にタイヤヤクロークつきのアームとかついてて、変形しながら瓦礫の中を動き回るもののような・・・。
恐らく世間一般的にロボカップジュニアのレスキューロボットってレスキューロボットとして認識されませんよね?
なんかそれが気になったので、この前、
世間一般的にレスキューロボットとして認識されるようなレスキューロボットを作ってみようと思ったのですけど・・・
その結果がこれだよ・・・
一応なんか後ろだけでも可動するのですが、
正直言って企画倒れ感が否めない・・・(苦笑)
結局レスキューロボットに見えるレスキューロボットはできませんでした。
そもそもコイツ、被災者思いっきり床に叩きつけていましたからね・・・。レスキュー?殺人の間違いじゃ・・・
それでなのですが、今度こそ、レスキューロボットに見えるレスキューロボットを作りたいと思っているのですね。
いや、勿論、LEGOでですよ?自作で作っちゃったら(形だけなら)結構あっさりできてしまいましたから・・・
まぁそれには色々問題があって、まず、アームを使うとなると、
どうやって3つのモーターで通常の移動と前後のアームを制御しようかな・・・というところに問題がでてきます(笑)
やっぱりNXT2台積みかなぁ。うわぁ死ねる(笑)
なんて感じのことを今計画しています。夏中に作れるといいなー。なんて感じで頑張ろうとしています。
という訳で今日はこの辺で。
今日は期末試験解析と英語と情報でした。明日は物理と政経だーorz
(^・ω・)ノ RadiumProduction in RoboCup Junior
「これのどこがレスキューロボット」って?
このロボット、どっからみてもわからない・・・
レスキュー要素ってどこにあるんでしょうかね?でもこのロボットでレスキュー競技ができたんですよね・・・
レスキューなのに荒地を走るようにできてないし、そもそも人助けられないし、踏みつけるだけだし・・・
今のロボットはちゃんと被災者をつかむ機構がある・・・あるはあるのですが・・・
こんな感じ。
やっぱりレスキューとは程遠いような・・・。
なんか僕のイメージではレスキューロボットって・・・こう・・・瓦礫の中でもガタガタ移動できて
なんか・・・前後にタイヤヤクロークつきのアームとかついてて、変形しながら瓦礫の中を動き回るもののような・・・。
恐らく世間一般的にロボカップジュニアのレスキューロボットってレスキューロボットとして認識されませんよね?
なんかそれが気になったので、この前、
世間一般的にレスキューロボットとして認識されるようなレスキューロボットを作ってみようと思ったのですけど・・・
その結果がこれだよ・・・
一応なんか後ろだけでも可動するのですが、
正直言って企画倒れ感が否めない・・・(苦笑)
結局レスキューロボットに見えるレスキューロボットはできませんでした。
そもそもコイツ、被災者思いっきり床に叩きつけていましたからね・・・。レスキュー?殺人の間違いじゃ・・・
それでなのですが、今度こそ、レスキューロボットに見えるレスキューロボットを作りたいと思っているのですね。
いや、勿論、LEGOでですよ?自作で作っちゃったら(形だけなら)結構あっさりできてしまいましたから・・・
まぁそれには色々問題があって、まず、アームを使うとなると、
どうやって3つのモーターで通常の移動と前後のアームを制御しようかな・・・というところに問題がでてきます(笑)
やっぱりNXT2台積みかなぁ。うわぁ死ねる(笑)
なんて感じのことを今計画しています。夏中に作れるといいなー。なんて感じで頑張ろうとしています。
という訳で今日はこの辺で。
今日は期末試験解析と英語と情報でした。明日は物理と政経だーorz
(^・ω・)ノ RadiumProduction in RoboCup Junior
条件文の続きです。
今日は前回の予告通りに「何回ループを行うか」というループを、
while文やdo~while文より簡単に作れる条件文を 紹介します。
その条件文の名前はfor文。
while文やdo~while文と同じようなル―プ形の条件文です。
ちょっと簡単なプログラムを書いてみましょうか。
#include <stdio.h>
int main(void)
{
int i;
for(i=1;i<=5;i++){
printf("%d回目のループです。/n",x);
}
return 0;
}
例えば、こんなプログラム。
これは前回のwhile文の時にサンプルとして書いた、
このプログラムと同じ出力結果になります。
#include <stdio.h>
int main(void)
{
int i;
i=1;
while(i<=5){
printf("%d回目のループです。/n",x);
i++;
}
return 0;
}
確かこれの出力結果は
1回目のループです。
2回目のループです。
3回目のループです。
4回目のループです。
5回目のループです。
となりましたよね?
上のfor文を使ったプログラムでもこれと同じ出力結果になります。
上のプログラムと下のプログラム、結果的には同じですが、書き方は全然違います。
じゃあまずどこが違うかを探してみましょう。
まずループに入る前のi=1;つまり最初にiに数字を入れる代入の式の有無があります。
while文ではありますが、for文にはありません。
その代わり、for文の条件の括弧の中に似たようなものがありますよね。
for(i=1;i<=5;i++){
この一番左の部分に
そしてこの真ん中の部分はwhile文の時の条件と同じであることがわかります。
そして一番右、i++というものですが、これはwhile文のどこかで見覚えがありませんか?
while文の下から4行目にありますよね?i++;って。確かこれはiに1を足すという、
インクリメント演算子とかいうやつでした。
これ、for文の方ではありませんよね?
違いといえば、こんなものでしょうか。この違いはどういうことかといいますと、
つまりwhile文で回数ループを行うときは、プログラム内で最初のiの値を代入する文を書いたり、
ループごとにiの値を増やすような文を個別に書かなくてはなりませんでした。
でもfor文では、それを一個一個代入したりする文をプログラム内に書く必要はなく、
全部for文の条件の中にまとめてかけるという訳です。
ここでもう一回for文の条件の部分を確認しましょう。
for(i=1;i<=5;i++){
このようになっていて、i=1とi<=5とi++がセミコロン(;)で分けられていました。
これはそれぞれ全く別の命令を示していて、
一番左の部分は「初期化」の部分と言われ、ループ前の変数の値を定義します。
そして真ん中の文がwhile文と同じ条件の文になります。
この「iが5以下である」という条件が成立する間この文を繰り返すという命令になります。
そして一番右端がループ内の処理が1回終わるごとに行う命令を記述する部分です。
今回はここにi++とありますが、これによって、このループ処理が一回行われるごとにiに1足していく処理になります。
要するにこのプログラムの場合、ループは最初i=1の状態でスタートし、iが6になるまでループを繰り返します。
そして一回ループ内の処置が終わるごとに、iの値が1ずつ増えていくようなプログラムになるのです。
これがfor文の基本構造です。
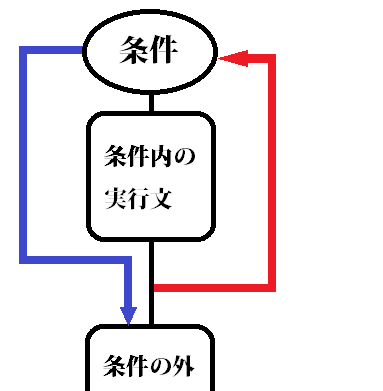
また、条件の確認の位置はwhile文と同じになるので、図にするとこのようになります。
実はwhile文の使いまわしだったり(笑)
とりあえずfor文は駆け足でしたが以上で終了です。
次はもうひとつだけ条件文を紹介します。
今度はif文を発展させたようなものになります。
それではー。
(^・ω・)ノRadiumProduction in RoboCup Junior
今日は前回の予告通りに「何回ループを行うか」というループを、
while文やdo~while文より簡単に作れる条件文を 紹介します。
その条件文の名前はfor文。
while文やdo~while文と同じようなル―プ形の条件文です。
ちょっと簡単なプログラムを書いてみましょうか。
#include <stdio.h>
int main(void)
{
int i;
for(i=1;i<=5;i++){
printf("%d回目のループです。/n",x);
}
return 0;
}
例えば、こんなプログラム。
これは前回のwhile文の時にサンプルとして書いた、
このプログラムと同じ出力結果になります。
#include <stdio.h>
int main(void)
{
int i;
i=1;
while(i<=5){
printf("%d回目のループです。/n",x);
i++;
}
return 0;
}
確かこれの出力結果は
1回目のループです。
2回目のループです。
3回目のループです。
4回目のループです。
5回目のループです。
となりましたよね?
上のfor文を使ったプログラムでもこれと同じ出力結果になります。
上のプログラムと下のプログラム、結果的には同じですが、書き方は全然違います。
じゃあまずどこが違うかを探してみましょう。
まずループに入る前のi=1;つまり最初にiに数字を入れる代入の式の有無があります。
while文ではありますが、for文にはありません。
その代わり、for文の条件の括弧の中に似たようなものがありますよね。
for(i=1;i<=5;i++){
この一番左の部分に
そしてこの真ん中の部分はwhile文の時の条件と同じであることがわかります。
そして一番右、i++というものですが、これはwhile文のどこかで見覚えがありませんか?
while文の下から4行目にありますよね?i++;って。確かこれはiに1を足すという、
インクリメント演算子とかいうやつでした。
これ、for文の方ではありませんよね?
違いといえば、こんなものでしょうか。この違いはどういうことかといいますと、
つまりwhile文で回数ループを行うときは、プログラム内で最初のiの値を代入する文を書いたり、
ループごとにiの値を増やすような文を個別に書かなくてはなりませんでした。
でもfor文では、それを一個一個代入したりする文をプログラム内に書く必要はなく、
全部for文の条件の中にまとめてかけるという訳です。
ここでもう一回for文の条件の部分を確認しましょう。
for(i=1;i<=5;i++){
このようになっていて、i=1とi<=5とi++がセミコロン(;)で分けられていました。
これはそれぞれ全く別の命令を示していて、
一番左の部分は「初期化」の部分と言われ、ループ前の変数の値を定義します。
そして真ん中の文がwhile文と同じ条件の文になります。
この「iが5以下である」という条件が成立する間この文を繰り返すという命令になります。
そして一番右端がループ内の処理が1回終わるごとに行う命令を記述する部分です。
今回はここにi++とありますが、これによって、このループ処理が一回行われるごとにiに1足していく処理になります。
要するにこのプログラムの場合、ループは最初i=1の状態でスタートし、iが6になるまでループを繰り返します。
そして一回ループ内の処置が終わるごとに、iの値が1ずつ増えていくようなプログラムになるのです。
これがfor文の基本構造です。
また、条件の確認の位置はwhile文と同じになるので、図にするとこのようになります。
実はwhile文の使いまわしだったり(笑)
とりあえずfor文は駆け足でしたが以上で終了です。
次はもうひとつだけ条件文を紹介します。
今度はif文を発展させたようなものになります。
それではー。
(^・ω・)ノRadiumProduction in RoboCup Junior
以前にダイオードのお話をしたかと思います。
今日はそのダイオードを利用した素子の話をしようと思います。
今日紹介するのはトランジスタという素子です。

これは何かといいますと、簡単に言って電気的なスイッチです。
つまりどういうことかというと、電気信号でスイッチのオン。オフを行うということになるでしょうか。
この素子には足が3本ありますよね?その足たちは普段は電気的につながってはいないけど、
3本の素子の1本に電流を流してやると、残りの2本の足同士が電気的につながる、つまりスイッチがオンになる
まぁこのような感じです。
その電流を流してやる足をベース(B)、
そして繋がる足をコレクタ(C)エミッタ(E)といいます。
まぁこれがトランジスタの基本です。
次にトランジスタの種類ですが、まず大きく分けて・・・といっても分け方が色々あるので、どうしようか迷いましたが
とりあえずまずはnpn型とpnp型に分けてみようかなと思います。
この二つ、何が違うかといいますと、電流の流れる向きが違います。
npn型はBからEに電流を流してやると、CからEに大電流が流れます。
逆にpnp型はEからBに電流を流してやるとEからCに大電流が流れます。
要するに真逆の特性ですね。
因みに、npn型の回路記号はこれで、
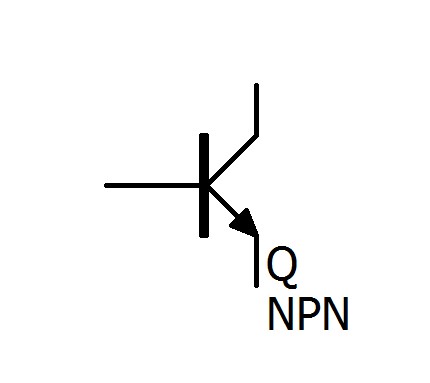
pnp型の回路記号はこれになっています。
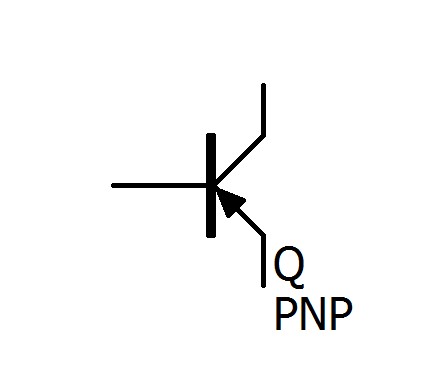
どちらの記号でも、左側の線がB、矢印の先がE、その反対側がCになっています。
とりあえずこれで回路を適当に作ってみましょう。
まずはnpn型です。
このように接続します。この時左のBATTERYから電流が流れていれば、
CからEに電流がながれ、右側の回路に大電流が流れます。
次にpnpだとこうなります。
電池が逆になっていますね。これも左のBATTERYから電流が流れていれば
今度はEからCに電流が流れて右側の回路に大電流が流れます。
これが基本的なトランジスタの回路です。
でもこの2つ回路、実際に作ると・・・
燃えます(笑)
じゃあどうしたら燃えないのか。
その話は次回に回そうと思います。
それでは今日はこの辺で。
(^・ω・)ノRadiumProduction in RoboCupJunior
今日はそのダイオードを利用した素子の話をしようと思います。
今日紹介するのはトランジスタという素子です。
これは何かといいますと、簡単に言って電気的なスイッチです。
つまりどういうことかというと、電気信号でスイッチのオン。オフを行うということになるでしょうか。
この素子には足が3本ありますよね?その足たちは普段は電気的につながってはいないけど、
3本の素子の1本に電流を流してやると、残りの2本の足同士が電気的につながる、つまりスイッチがオンになる
まぁこのような感じです。
その電流を流してやる足をベース(B)、
そして繋がる足をコレクタ(C)エミッタ(E)といいます。
まぁこれがトランジスタの基本です。
次にトランジスタの種類ですが、まず大きく分けて・・・といっても分け方が色々あるので、どうしようか迷いましたが
とりあえずまずはnpn型とpnp型に分けてみようかなと思います。
この二つ、何が違うかといいますと、電流の流れる向きが違います。
npn型はBからEに電流を流してやると、CからEに大電流が流れます。
逆にpnp型はEからBに電流を流してやるとEからCに大電流が流れます。
要するに真逆の特性ですね。
因みに、npn型の回路記号はこれで、
pnp型の回路記号はこれになっています。
どちらの記号でも、左側の線がB、矢印の先がE、その反対側がCになっています。
とりあえずこれで回路を適当に作ってみましょう。
まずはnpn型です。
このように接続します。この時左のBATTERYから電流が流れていれば、
CからEに電流がながれ、右側の回路に大電流が流れます。
次にpnpだとこうなります。
電池が逆になっていますね。これも左のBATTERYから電流が流れていれば
今度はEからCに電流が流れて右側の回路に大電流が流れます。
これが基本的なトランジスタの回路です。
でもこの2つ回路、実際に作ると・・・
燃えます(笑)
じゃあどうしたら燃えないのか。
その話は次回に回そうと思います。
それでは今日はこの辺で。
(^・ω・)ノRadiumProduction in RoboCupJunior
最近、そういう類のものでグーグル先生で 検索を掛けると何故か結構な確率で自分のブログにぶつかってしまいます。
面白そうな記事だなーっと思ってクリックすると、「あれ?Radium?あ、そういえばこんな記事書いたっけ・・・」
という風になることが多い・・・です・・・。
10000を超えたあたりからアクセスも急に伸びだして「不思議―」に思っていたのですがそういうことだったのですね。
これだけ引っかかればこうなるわ・・・
一応情報科なのでこの辺のことはわかってはいるのですが・・・やっぱり訳が分かりませんね(笑)
別に特別SEO対策をしている訳ではないのですが、なんか増えちゃったんですよね。
どっかの有名サイトがリンクでも貼ってくれたのかな?
3か月前にも同じような現象があったんですよね。
開設から3ヶ月周期でブログのアクセスは伸びるという都市伝説は本当だったのか・・・(注:そんなもんありません。)
因みに一応アクセス解析を利用しているので、どういった検索ワードでのアクセスがあるのかはわかっているんです。
使っているアクセス解析サービス。忍者ですよー。
ここ最近では、どういうものがあるかというと、(フレーズ)
pickit2 16F1938
KXP84-2050 I2C
radiumproduction
2011高専ロボコン 捕球
NXT 超音波センサ
bricxCC 加速度センサー
つかむ 機構
ロボカップ レスキュー マインドストーム プログラム
等様々です。
特徴としては、フレーズが殆ど被ってない。つまり同じフレーズでのアクセスはほとんどないんです。
自分のほかのブログとかだと(断片検索をするとグーグル検索の関連ワードにでてくる程度のものなのですが)
結構フレーズはダブっているのですが、フレーズどころか、ワードすら殆どダブっていません。
因みにフレーズというのは検索に入れた文字全て、ワードというのは検索フレーズに含まれる単語のことです。
基本的にワードはスペースで区切られます。区切らないと1ワード=1フレーズになります。
一般的に検索を行う場合はワードが多いフレーズの方がかかりやすいので、
なにか検索をする際は文章ではなく、単語ごとにスペースを入れて検索をするといいでしょう。
とこんな感じです。このアクセス解析が4ヶ月分しかデータをとれないのもあるとは思いますが、
フレーズだと2桁はありませんね。ワードでも2桁はnxtだけじゃないでしょうか。
只傾向としては、ロボカップの話、回路の話、RCX、NXTの話、PICの話に関連するワードが殆どですね。
でもやっぱり気になるフレーズはこういうものにはつきものなんですね。
今回気になったのは
まず、「地デジ化」
アナログの終了の話も含めて地デジ化関連の検索が異常に多かったです。
まぁ記事が2つありますから仕方ない・・・のか?
1つめ
2つめ
大体これが5フレーズほど来ていました。
後は「東東京の勝敗予想」なんてフレーズもありましたね。ずいぶん前の記事です。
あとは「回路 ユニバーサル基板」
一見ありがちなのでよく引っかかったなぁと思って自分でこのワードで検索してみたら、
なんと1ページ目。どういうことなの・・・
探してみると、他にも1ページ目のフレーズは結構あって、一番上になっているものもいくつもありましたね。
あと同じ理由で「コンデンサ」というもののあったので此方もかけてみたのですが、
こっちは逆にどうやっても見つかりませんでした。20ページ目までいってもないって・・・
どうやってこのフレーズでここにたどり着いたのでしょうね(笑)
あと流石に吹いてしまったのがこのフレーズ
「グーグルカレンダー みにくい」
しかも2つも
・・・たしかにそんなこと書きましたよ、タイトルに。
でもこの記事、内容は全く関係ないんですよね・・・検索って怖いね。
という訳で皆さん。ブログは予想外に伸びることもあるので、ブログでの発言には気を付けましょう。という記事でした。
これ、Softカテゴリーでいいのか・・・?
まぁアクセス解析ソフトサービスを紹介したということで・・・
それではー
(^・ω・)ノRadiumProduction in RoboCupJunior
面白そうな記事だなーっと思ってクリックすると、「あれ?Radium?あ、そういえばこんな記事書いたっけ・・・」
という風になることが多い・・・です・・・。
10000を超えたあたりからアクセスも急に伸びだして「不思議―」に思っていたのですがそういうことだったのですね。
これだけ引っかかればこうなるわ・・・
一応情報科なのでこの辺のことはわかってはいるのですが・・・やっぱり訳が分かりませんね(笑)
別に特別SEO対策をしている訳ではないのですが、なんか増えちゃったんですよね。
どっかの有名サイトがリンクでも貼ってくれたのかな?
3か月前にも同じような現象があったんですよね。
開設から3ヶ月周期でブログのアクセスは伸びるという都市伝説は本当だったのか・・・(注:そんなもんありません。)
因みに一応アクセス解析を利用しているので、どういった検索ワードでのアクセスがあるのかはわかっているんです。
使っているアクセス解析サービス。忍者ですよー。
ここ最近では、どういうものがあるかというと、(フレーズ)
pickit2 16F1938
KXP84-2050 I2C
radiumproduction
2011高専ロボコン 捕球
NXT 超音波センサ
bricxCC 加速度センサー
つかむ 機構
ロボカップ レスキュー マインドストーム プログラム
等様々です。
特徴としては、フレーズが殆ど被ってない。つまり同じフレーズでのアクセスはほとんどないんです。
自分のほかのブログとかだと(断片検索をするとグーグル検索の関連ワードにでてくる程度のものなのですが)
結構フレーズはダブっているのですが、フレーズどころか、ワードすら殆どダブっていません。
因みにフレーズというのは検索に入れた文字全て、ワードというのは検索フレーズに含まれる単語のことです。
基本的にワードはスペースで区切られます。区切らないと1ワード=1フレーズになります。
一般的に検索を行う場合はワードが多いフレーズの方がかかりやすいので、
なにか検索をする際は文章ではなく、単語ごとにスペースを入れて検索をするといいでしょう。
とこんな感じです。このアクセス解析が4ヶ月分しかデータをとれないのもあるとは思いますが、
フレーズだと2桁はありませんね。ワードでも2桁はnxtだけじゃないでしょうか。
只傾向としては、ロボカップの話、回路の話、RCX、NXTの話、PICの話に関連するワードが殆どですね。
でもやっぱり気になるフレーズはこういうものにはつきものなんですね。
今回気になったのは
まず、「地デジ化」
アナログの終了の話も含めて地デジ化関連の検索が異常に多かったです。
まぁ記事が2つありますから仕方ない・・・のか?
1つめ
2つめ
大体これが5フレーズほど来ていました。
後は「東東京の勝敗予想」なんてフレーズもありましたね。ずいぶん前の記事です。
あとは「回路 ユニバーサル基板」
一見ありがちなのでよく引っかかったなぁと思って自分でこのワードで検索してみたら、
なんと1ページ目。どういうことなの・・・
探してみると、他にも1ページ目のフレーズは結構あって、一番上になっているものもいくつもありましたね。
あと同じ理由で「コンデンサ」というもののあったので此方もかけてみたのですが、
こっちは逆にどうやっても見つかりませんでした。20ページ目までいってもないって・・・
どうやってこのフレーズでここにたどり着いたのでしょうね(笑)
あと流石に吹いてしまったのがこのフレーズ
「グーグルカレンダー みにくい」
しかも2つも
・・・たしかにそんなこと書きましたよ、タイトルに。
でもこの記事、内容は全く関係ないんですよね・・・検索って怖いね。
という訳で皆さん。ブログは予想外に伸びることもあるので、ブログでの発言には気を付けましょう。という記事でした。
これ、Softカテゴリーでいいのか・・・?
まぁアクセス解析ソフトサービスを紹介したということで・・・
それではー
(^・ω・)ノRadiumProduction in RoboCupJunior
なんということでしょう。
知らないうちに今日は前期末試験の一発目がありました。
国語と線形と応数かぁ・・・。
線形と応数は試験中にいつのまにか寝ていたようで、20分ほど記憶がありません。
国語は漢字とずっと戦っていました。最終的に新しい漢字作ってたなぁ。
一年生は地理と物理だったようですね。早速総書記様から終了\(^o^)/通知がきました。
これで彼も2教科赤点で2か月の部活停止かぁ。
正直2つも赤点があると部活とかまともにやっていいレベルではありませんしね。留年一歩手前だし。
このままだと「来年の一年生の部員を確実に一人確保しているんです」なんていう羽目になりかねないので
総書記様にはがんばって頂きたいものです。
僕ですか?いつものようにノー勉ですよ。
という訳で今日はセンサーの紹介です。面白いものがあるので・・・

今日紹介するセンサーはこれです。
このセンサー、なにかというと、人体検知センサーだったりするんです。
人の動きを感知して、信号を出します。
これは俗にいう焦電センサーというものをちょっと進化させたようなもので、
簡単に説明すると人間が出している微量の赤外線を検知する、という感じものです。
温度がある物質は常に光をだし、温度が高い方が光の波長が短い、つまり赤外線から可視光に近くなりますから
その原理を利用して検出範囲内の空間と人間の出している光の違いを測定する=熱量の測定をすることで
人体を検知することができるセンサーという訳です。
只、基本的にこの手のセンサーは温度の変化量の測定しかできないので
実際の温度の値を出そうと思ったら積分しないといけませんね。
なんで変化量の測定という方式になっているかといいますと、人体というのは動きますから、
動いて、センサーの検出範囲内に人が入った瞬間だけ反応する、といった流れの方が制御は楽ですよね。
しかも変化値でないと、外気と体温の差があまりない時に、検出をするのが困難になってしまいます。
35度と36度の差を測定しようなんてなると、あまり値が変わらないので大変ですが、
これが変化値なら、35度の時ずっと0で36になった瞬間だけ1になりますからだいぶわかりやすくなりますよね。
そういった理由で変化値で検出されるようになっているそうです。
このセンサーですが、一般にはよくセンサーライトとか言われる夜間に人が近づくと光る街路灯や
最近増えてきた人がくると動き出すエスカレーターなどに使われています。(只の光センサーの場合もありますが)
だから例えば兵器的いうと、これで人が近づくと壁からバーンするようなアレを作ることができますね。
今日はそんな面白いセンサーの紹介でした。
因みにこれはセンサー自体が動いてしまうと正しい測定ができなくなります。
僕はこれをレスキューBで使って死にました♪
(^・ω・)ノRadiumProduction in RoboCupJunior
知らないうちに今日は前期末試験の一発目がありました。
国語と線形と応数かぁ・・・。
線形と応数は試験中にいつのまにか寝ていたようで、20分ほど記憶がありません。
国語は漢字とずっと戦っていました。最終的に新しい漢字作ってたなぁ。
一年生は地理と物理だったようですね。早速総書記様から終了\(^o^)/通知がきました。
これで彼も2教科赤点で2か月の部活停止かぁ。
正直2つも赤点があると部活とかまともにやっていいレベルではありませんしね。留年一歩手前だし。
このままだと「来年の一年生の部員を確実に一人確保しているんです」なんていう羽目になりかねないので
総書記様にはがんばって頂きたいものです。
僕ですか?いつものようにノー勉ですよ。
という訳で今日はセンサーの紹介です。面白いものがあるので・・・
今日紹介するセンサーはこれです。
このセンサー、なにかというと、人体検知センサーだったりするんです。
人の動きを感知して、信号を出します。
これは俗にいう焦電センサーというものをちょっと進化させたようなもので、
簡単に説明すると人間が出している微量の赤外線を検知する、という感じものです。
温度がある物質は常に光をだし、温度が高い方が光の波長が短い、つまり赤外線から可視光に近くなりますから
その原理を利用して検出範囲内の空間と人間の出している光の違いを測定する=熱量の測定をすることで
人体を検知することができるセンサーという訳です。
只、基本的にこの手のセンサーは温度の変化量の測定しかできないので
実際の温度の値を出そうと思ったら積分しないといけませんね。
なんで変化量の測定という方式になっているかといいますと、人体というのは動きますから、
動いて、センサーの検出範囲内に人が入った瞬間だけ反応する、といった流れの方が制御は楽ですよね。
しかも変化値でないと、外気と体温の差があまりない時に、検出をするのが困難になってしまいます。
35度と36度の差を測定しようなんてなると、あまり値が変わらないので大変ですが、
これが変化値なら、35度の時ずっと0で36になった瞬間だけ1になりますからだいぶわかりやすくなりますよね。
そういった理由で変化値で検出されるようになっているそうです。
このセンサーですが、一般にはよくセンサーライトとか言われる夜間に人が近づくと光る街路灯や
最近増えてきた人がくると動き出すエスカレーターなどに使われています。(只の光センサーの場合もありますが)
だから例えば兵器的いうと、これで人が近づくと壁からバーンするようなアレを作ることができますね。
今日はそんな面白いセンサーの紹介でした。
因みにこれはセンサー自体が動いてしまうと正しい測定ができなくなります。
僕はこれをレスキューBで使って死にました♪
(^・ω・)ノRadiumProduction in RoboCupJunior
最近は、クラスで意味も分からずDMが流行っているという話は前にしたかと思います。
流行っている・・というより懐古厨の僕らが流行らせたのですけど・・・
勿論使っているカードは古き良き時代のものだけですよー。
あとは麻雀とかが相変わらず流行っています。今日も東一局で国士無双アガって電通部部長を飛ばしました。
そして懐古厨は再び古い時代へと遡るのです・・・
という訳で今日は昔使っていたセンサーの紹介をしようかと思います。
っていう改か以前も紹介しましたけど・・・
今日は水銀センサー、チルトセンサー、坂センサー、なんて呼ばれている部品について紹介します。
まずこれが水銀センサーで、

これがチルトセンサーです。

実は以前にも紹介しているんですね。この二つ
因みに他には
こんなのとか

こんなのがあるようです。

まぁこんな感じのセンサーですが、元々は、一定量以上の傾斜、振動を検知する部品で、
検出は振動と傾きの区別をしない点が特徴です。
一般に(一番下のは違うけど)半導体を使用しないのでとても単純な構成となっています。
なので一般的にはセンサーと言わず、スイッチということが多いのですが、
ロボカップジュニアレスキューのロボットにおいては「坂を検知するセンサー」としての使用が殆どなので
センサーと呼ぶ場合が多いです。
内部構造は簡単で中身は電極2つと導体でできた球や水銀です。
振動がなかったり傾きが0の時は2つの電極は電気的に断線されていますが、
このように振動や傾きで中の導体が動くと、2つの電極が導体を通して電気的に繋がります。
これを利用したのがこの坂センサーです。
これに例えばRCXのコードをつないでLEGOのロボットにつないだりすると、
センサーを傾けた時にセンサーがタッチセンサと同じような反応をすることがわかります。
というのがこのセンサーたちの特徴です。部品から出ている足は2本だけでな場合もありますが
それはデータシートを見て確認するのが吉でしょう。
無暗につなぐと、とんでもないことになるかも・・です。
という訳で今日は以前よりもっと具体的なこの坂センサーの説明を行いました。
とりあえず明後日から中間試験です。さて、明日は午前授業も同然だ。なにしよう・・・
それではー
(^・ω・)ノRadiumProduction in RoboCupJunior
流行っている・・というより懐古厨の僕らが流行らせたのですけど・・・
勿論使っているカードは古き良き時代のものだけですよー。
あとは麻雀とかが相変わらず流行っています。今日も東一局で国士無双アガって電通部部長を飛ばしました。
そして懐古厨は再び古い時代へと遡るのです・・・
という訳で今日は昔使っていたセンサーの紹介をしようかと思います。
っていう改か以前も紹介しましたけど・・・
今日は水銀センサー、チルトセンサー、坂センサー、なんて呼ばれている部品について紹介します。
まずこれが水銀センサーで、
これがチルトセンサーです。
実は以前にも紹介しているんですね。この二つ
因みに他には
こんなのとか
こんなのがあるようです。
まぁこんな感じのセンサーですが、元々は、一定量以上の傾斜、振動を検知する部品で、
検出は振動と傾きの区別をしない点が特徴です。
一般に(一番下のは違うけど)半導体を使用しないのでとても単純な構成となっています。
なので一般的にはセンサーと言わず、スイッチということが多いのですが、
ロボカップジュニアレスキューのロボットにおいては「坂を検知するセンサー」としての使用が殆どなので
センサーと呼ぶ場合が多いです。
内部構造は簡単で中身は電極2つと導体でできた球や水銀です。
振動がなかったり傾きが0の時は2つの電極は電気的に断線されていますが、
このように振動や傾きで中の導体が動くと、2つの電極が導体を通して電気的に繋がります。
これを利用したのがこの坂センサーです。
これに例えばRCXのコードをつないでLEGOのロボットにつないだりすると、
センサーを傾けた時にセンサーがタッチセンサと同じような反応をすることがわかります。
というのがこのセンサーたちの特徴です。部品から出ている足は2本だけでな場合もありますが
それはデータシートを見て確認するのが吉でしょう。
無暗につなぐと、とんでもないことになるかも・・です。
という訳で今日は以前よりもっと具体的なこの坂センサーの説明を行いました。
とりあえず明後日から中間試験です。さて、明日は午前授業も同然だ。なにしよう・・・
それではー
(^・ω・)ノRadiumProduction in RoboCupJunior
今日はサマーチャレンジのサッカーのルールを説明したいと思います。
そう・・・思っていた時期が私にもありました(笑)
どうやらサッカーの方は基本的に去年のサッカーAのジャパンオープンローカルルールのようです・・・
なのでこの大会のローカルルールのみ紹介を行います。
まずは、年齢、ロボットの重量問わず全部サッカーAになります。
つまり全部の区分、全部まとめて競技を行うようです。(最大重量は2500gです。)
要するに自作の化け物とNXTが同じフィールドに・・・恐ろしや(笑)
また、フィールドの仕様はサッカーAでグリーンカーペットが引かれるそうです。グレースケールはありませんよ。
また、ボールは一応新しいパルスボールを使用するみたいですが、常時発光で行います。
ルールに関しての変更は、キーパーロボットの指定(一台のみ)を行うことができたり、
大きいのはボールのスタック時にキャプテンはロボットの移動を行うことができるという点です。
移動先は自陣のどちらかの中立点かセンターの中立点のどちらか、キーパーはゴール前も可です。
既にロボットのいるところへの移動はできないということは、移動は早い者勝ち?ちょっとその辺り不明です。
この時ボールは近くの中立点にいきます。これは普通ですね。
只、ボールの移動はロボットの移動後なので
ロボットの移動先によっては大変な位置に移動することがあるかも知れませんね。
あと一番大きいのは、チームについて。
2対2なのは同じですが、通常の大会と違って、チームでのエントリーはできません。
ロボット一台ずつでエントリーして、当日に編成されるマルチチームで競技をすることになります。
なので当日までパートナーのロボットの性能はわかりません。
戦略的な意味でかなりハードな競技になりそうですね。
それとも片方だけで無双するロボットが現れてボロ勝ちしてしまうのか?
まぁその辺りは当日楽しむとしましょう。
といってもまたサッカーとは別室かな?
そんな感じで今日はサッカー競技ローカルルールの紹介でした。
詳細はここを参考にしてください。
(^・ω・)ノRadiumProduction in RoboCupJunior
そう・・・思っていた時期が私にもありました(笑)
どうやらサッカーの方は基本的に去年のサッカーAのジャパンオープンローカルルールのようです・・・
なのでこの大会のローカルルールのみ紹介を行います。
まずは、年齢、ロボットの重量問わず全部サッカーAになります。
つまり全部の区分、全部まとめて競技を行うようです。(最大重量は2500gです。)
要するに自作の化け物とNXTが同じフィールドに・・・恐ろしや(笑)
また、フィールドの仕様はサッカーAでグリーンカーペットが引かれるそうです。グレースケールはありませんよ。
また、ボールは一応新しいパルスボールを使用するみたいですが、常時発光で行います。
ルールに関しての変更は、キーパーロボットの指定(一台のみ)を行うことができたり、
大きいのはボールのスタック時にキャプテンはロボットの移動を行うことができるという点です。
移動先は自陣のどちらかの中立点かセンターの中立点のどちらか、キーパーはゴール前も可です。
既にロボットのいるところへの移動はできないということは、移動は早い者勝ち?ちょっとその辺り不明です。
この時ボールは近くの中立点にいきます。これは普通ですね。
只、ボールの移動はロボットの移動後なので
ロボットの移動先によっては大変な位置に移動することがあるかも知れませんね。
あと一番大きいのは、チームについて。
2対2なのは同じですが、通常の大会と違って、チームでのエントリーはできません。
ロボット一台ずつでエントリーして、当日に編成されるマルチチームで競技をすることになります。
なので当日までパートナーのロボットの性能はわかりません。
戦略的な意味でかなりハードな競技になりそうですね。
それとも片方だけで無双するロボットが現れてボロ勝ちしてしまうのか?
まぁその辺りは当日楽しむとしましょう。
といってもまたサッカーとは別室かな?
そんな感じで今日はサッカー競技ローカルルールの紹介でした。
詳細はここを参考にしてください。
(^・ω・)ノRadiumProduction in RoboCupJunior
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ