RoboCup Junior Japan Rescue Kanto OB
2005~2013
2005~2013
×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
この記事が平成最後の更新にならないことを祈りましょう。
お久しぶりです。
冬コミは直前ですが、この時期に何も更新がない以上、参加しないということは既におわかりかと思います。
五輪の関係上、この先しばらくのコミケはちょっとドタバタしそうなので、
これが終わって落ち着くまでは、コミケのサークル参加は見合わせようと考えております。
お久しぶりです。
冬コミは直前ですが、この時期に何も更新がない以上、参加しないということは既におわかりかと思います。
五輪の関係上、この先しばらくのコミケはちょっとドタバタしそうなので、
これが終わって落ち着くまでは、コミケのサークル参加は見合わせようと考えております。
既に各SNSにて告知済みの内容ではありますが、こちらの方には記載がなかったので改めて記載させて頂きます。
今回のコミックマーケット94には不参加となります。
また、今回は委託の方もございませんのでご了承ください。
C95への参加につきましては現在調整中ですが、
当方の予定がつかめないことから参加しない可能性が極めて高くなっておりますことご了承ください。
以上です。今年は一般参加で2-3日目に行こうと思っています。
(^・ω・)ノ RadiumProduction at curonet
今回のコミックマーケット94には不参加となります。
また、今回は委託の方もございませんのでご了承ください。
C95への参加につきましては現在調整中ですが、
当方の予定がつかめないことから参加しない可能性が極めて高くなっておりますことご了承ください。
以上です。今年は一般参加で2-3日目に行こうと思っています。
(^・ω・)ノ RadiumProduction at curonet
今年も、産技高専の後輩はやらかしたようですが、RCJ全国大会が無事終了したようですね。
参加された皆様、スタッフの方々、本当にお疲れ様でした。
参加された皆様、スタッフの方々、本当にお疲れ様でした。
今週末は、和歌山でRCJの全国大会があるとのことで。
僕のTL周りにもイキリロボカッパーが増えてきているのをひしひしと感じます。
あけましておめでとうございます。そしてコミックマーケット93、改めてお疲れ様でした。
新年開けて一番最初の記事はタイトルの通り、コミケ参加How to@サークル編です。
らじぷろの参加を受けてか偶然か、自分も出たい!という方の相談が冬コミ以降相次いだことから
こうやってまとまった記事の方を作成させて頂きました。
時系列でなんやらかんから書いてあるのでよろしければ参考に。
また、一般参加については去年作成したこちらの記事をご参照下さい。
新年開けて一番最初の記事はタイトルの通り、コミケ参加How to@サークル編です。
らじぷろの参加を受けてか偶然か、自分も出たい!という方の相談が冬コミ以降相次いだことから
こうやってまとまった記事の方を作成させて頂きました。
時系列でなんやらかんから書いてあるのでよろしければ参考に。
また、一般参加については去年作成したこちらの記事をご参照下さい。
サークルらじぷろ、コミケ1日目終了していました。
スペースの方に来てくれた方、差し入れ持ってきて頂いた方、本当にありがとうございました。
スペースの方に来てくれた方、差し入れ持ってきて頂いた方、本当にありがとうございました。
当日です死んじゃいますヤバイです。
準備の方が一通り終了いたしました。予定通りccinoliaryの頒布を行わせていただくのと、
進捗が沈黙してしまったペンライトについてなのですが、
試作版の展示が間に合いそうだったので(間に合ってないけど)一応持っていきます。
回路としてはまだ素子の一部がハンダ付け終わってない状況ですが、
一応動いているのでよろしければご覧ください。(どうしてこうなった
何度も告知しますが、場所は日付交わしまして本日29日東ホール3、カ-44aです。
コミケ自体の詳細や安全な渡航については此方のページをご参照下さい。
例年通りとてつもなく人が多く、不慣れな方には大変なイベントかとは思いますが、
お暇があれば是非お越しください(そして買ってね❤)
以上。当日深夜の行きてるよ報告でした(´・ω・`)
(^・ω・)ノ RadiumProduction at curonet
準備の方が一通り終了いたしました。予定通りccinoliaryの頒布を行わせていただくのと、
進捗が沈黙してしまったペンライトについてなのですが、
試作版の展示が間に合いそうだったので(間に合ってないけど)一応持っていきます。
回路としてはまだ素子の一部がハンダ付け終わってない状況ですが、
一応動いているのでよろしければご覧ください。(どうしてこうなった
何度も告知しますが、場所は日付交わしまして本日29日東ホール3、カ-44aです。
コミケ自体の詳細や安全な渡航については此方のページをご参照下さい。
例年通りとてつもなく人が多く、不慣れな方には大変なイベントかとは思いますが、
お暇があれば是非お越しください(そして買ってね❤)
以上。当日深夜の行きてるよ報告でした(´・ω・`)
(^・ω・)ノ RadiumProduction at curonet
深夜28時という微妙な時間ですが、コミックマーケット93にて頒布する頒布物のお品書きを出させて頂きます。
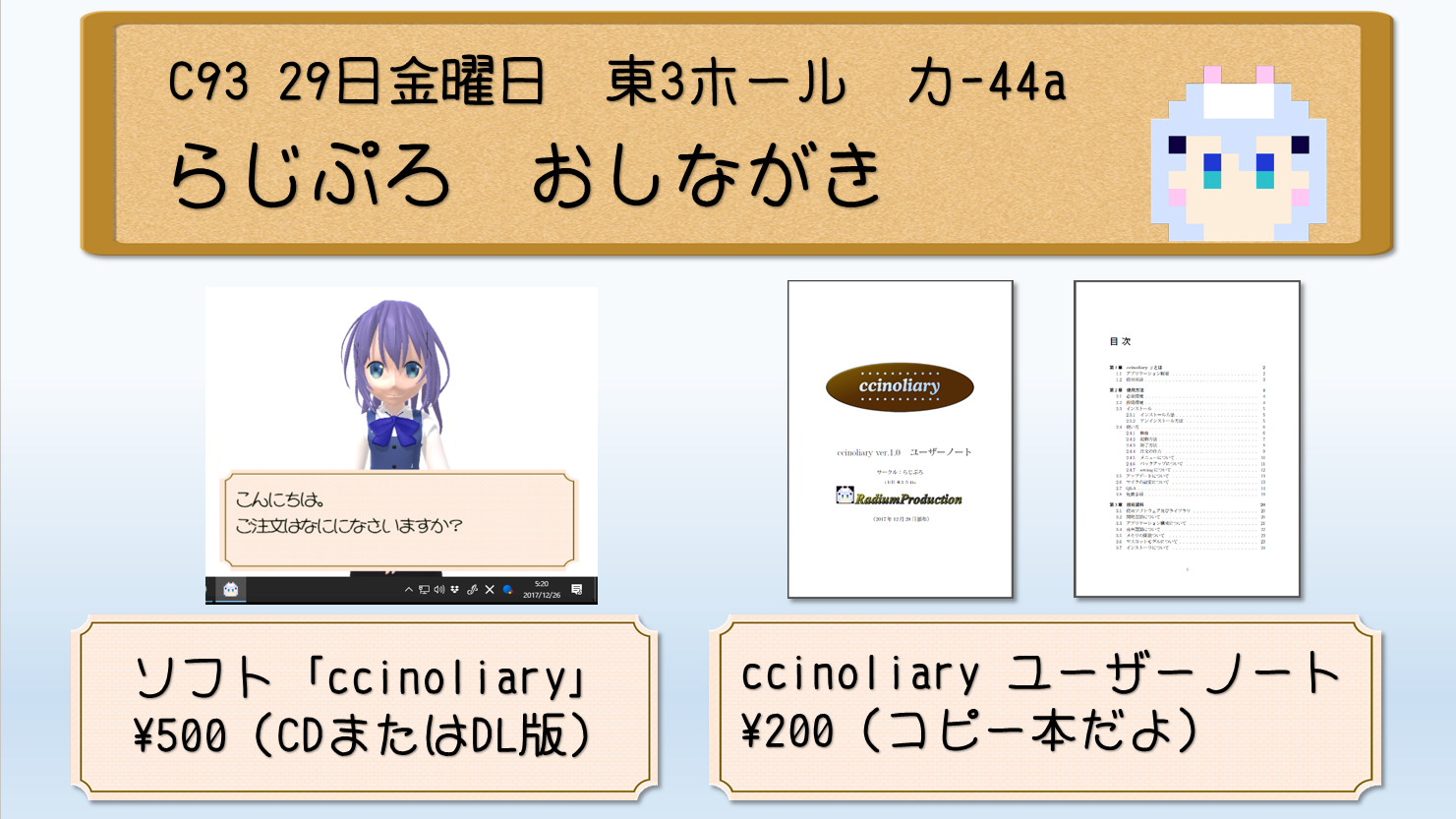
基本的には上記のとおりとなります。
ペンライトについてはサンプルは動いておりますが、生産上の都合で頒布は見送り、
また、Birth関連についてもライセンスの確認を行う時間がなかったので今回は頒布せずという形になります。
当日は僕とメンバー、あるいは合体サークル側の誰かが交代でスペースで担当させて頂きます。
なるべくスペースにはいるようにしますが、特に午前中は席を離れている場合も多くあるかと思います。
また、コミケの前提ではありますが、商業販売ではありませんのでご了承下さい。
数限はありませんので完売となった際にはご理解頂けるとうれしいです。
以上でコミックマーケット93関連の告知とさせていただきます。
次回、94につきましては参加の予定はありません。今回の結果次第では委託販売を行うかもしれません。
(^・ω・)ノ RadiumProduction at curonet
基本的には上記のとおりとなります。
ペンライトについてはサンプルは動いておりますが、生産上の都合で頒布は見送り、
また、Birth関連についてもライセンスの確認を行う時間がなかったので今回は頒布せずという形になります。
当日は僕とメンバー、あるいは合体サークル側の誰かが交代でスペースで担当させて頂きます。
なるべくスペースにはいるようにしますが、特に午前中は席を離れている場合も多くあるかと思います。
また、コミケの前提ではありますが、商業販売ではありませんのでご了承下さい。
数限はありませんので完売となった際にはご理解頂けるとうれしいです。
以上でコミックマーケット93関連の告知とさせていただきます。
次回、94につきましては参加の予定はありません。今回の結果次第では委託販売を行うかもしれません。
(^・ω・)ノ RadiumProduction at curonet
その2があるかは不明です。
お久しぶりです。
突然の報告になりますが、RadiumProduction発足10周年ということで
12/29-31日に開催されるコミックマーケット93でサークル出店することになりました。
具体的な頒布物はまだまだ確定していませんが
ペンライト的な何かの頒布及びTwitterアプリケーションBirthの頒布、
また、これは開発が間に合うか微妙なのですが、新しいソフトウェアの頒布も検討しています。
※ペンライトの方はもしかしたら受注生産になる可能性もありますにでご了承下さい。
今回はTwitter上でメンバーを募集してらじぷろで3人+神奈川工業大学のサークル、ポケット工房さんと
2サークルの合体サークルとして参加させて頂きます。
場所はTwittetの方では既に告知させていただいていますが、29日金曜日 東カ44aとなっております。
コミケの場合は土曜日、日曜日は別のサークル様の場所となりますのでご注意下さい。
年末でお忙しい時期かとは思うますが、暇な方、既にコミケ参加を決めている方など
いらっしゃいましたらお気軽にスペースの方までおこし下さい。
というわけでRadiumProduction管理人。Luzからのお知らせでした。
ハンネがとてもややこしいことになるので、当日は本名以外ならどのハンネでも読んでいただいて結構です。
(^・ω・)ノ curonet at RadiumProduction
突然の報告になりますが、RadiumProduction発足10周年ということで
12/29-31日に開催されるコミックマーケット93でサークル出店することになりました。
具体的な頒布物はまだまだ確定していませんが
ペンライト的な何かの頒布及びTwitterアプリケーションBirthの頒布、
また、これは開発が間に合うか微妙なのですが、新しいソフトウェアの頒布も検討しています。
※ペンライトの方はもしかしたら受注生産になる可能性もありますにでご了承下さい。
今回はTwitter上でメンバーを募集してらじぷろで3人+神奈川工業大学のサークル、ポケット工房さんと
2サークルの合体サークルとして参加させて頂きます。
場所はTwittetの方では既に告知させていただいていますが、29日金曜日 東カ44aとなっております。
コミケの場合は土曜日、日曜日は別のサークル様の場所となりますのでご注意下さい。
年末でお忙しい時期かとは思うますが、暇な方、既にコミケ参加を決めている方など
いらっしゃいましたらお気軽にスペースの方までおこし下さい。
というわけでRadiumProduction管理人。Luzからのお知らせでした。
ハンネがとてもややこしいことになるので、当日は本名以外ならどのハンネでも読んでいただいて結構です。
(^・ω・)ノ curonet at RadiumProduction
OB引退したので何も知らされてなかったのですが、今年のRCJ世界大会は名古屋で開催されたそうですね。
産技のチームは出てたのかな。そこら辺も詳しくは知りませんが、
参加された方、スタッフに参加された方、ひとまずお疲れ様です。
産技のチームは出てたのかな。そこら辺も詳しくは知りませんが、
参加された方、スタッフに参加された方、ひとまずお疲れ様です。
カレンダー
最新CM
カテゴリー
かうんた
らじぷろ目次
らじぷろ検索機
最新記事
(01/01)
(01/12)
(08/29)
(01/03)
(08/27)
(04/29)
(01/01)
(11/20)
(09/06)
(09/04)
(08/09)
(08/06)
(07/27)
(05/29)
(03/15)
プロフィール
HN:
Luz
性別:
男性
アーカイブ